Применение адаптивных нейросетевых алгоритмов управления асинхронным электроприводом для оптимизации режимов работы доильных установок с целью минимизации травматизма вымени

Автор: А.А. Жидович
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Электротехнологии, электрооборудование и энергоснабжение агропромышленного комплекса
Статья в выпуске: 4 (49), 2025 года.
Бесплатный доступ
Статья посвящена проблеме обеспечения стабильности рабочего вакуума в доильных установках. Показано, что динамические колебания вакуума, вызванные непредсказуемым изменением технологической нагрузки, являются основной причиной травматизма вымени и неэффективности классических ПИД-регуляторов. Целью работы является разработка и обоснование прогностической системы управления частотой асинхронного электропривода на базе нейросетевого контроллера LSTM. В отличие от реактивных ПИД-регуляторов, разработанный метод использует LSTM-модуль для упреждающего прогнозирования динамики вакуума и формирования корректирующего управляющего сигнала. Моделирование проводилось в среде MATLAB/Simulink при критическом ступенчатом сбросе нагрузки. Численные результаты подтвердили высокую эффективность прогностического подхода: максимальное отклонение вакуума 𝛥𝑃𝑚𝑎𝑥 было снижено на 81,5% (с 6,5 кПа до 1,2 кПа), а среднеквадратическое отклонение (𝜎𝑝) уменьшено на 77,3%. Время регулирования сократилось почти в три раза. Реализация прогностического управления гарантирует поддержание вакуума в безопасном технологическом коридоре (50±2 кПа), исключая травматизм вымени, и демонстрирует снижение энергопотребления электропривода до 4,5% в динамических режимах работы.
Вакуум, электропривод, частота, давление, время, ячейка, LTSM
Короткий адрес: https://sciup.org/147252884
IDR: 147252884 | УДК: 004.8:637.115
Application of adaptive neural network control algorithms for asynchronous electric drive to optimize milking umit operation modes and minimize udder trauma
The article addresses the problem of ensuring the stability of the working vacuum in milking units. It is shown that dynamic vacuum fluctuations, caused by unpredictable changes in technological load, are the main reason for udder trauma and the inefficiency of classic PID controllers. The aim of the work is to develop and substantiate a predictive control system for the frequency of an asynchronous electric drive based on an LSTM neural network controller. Unlike reactive PID controllers, the developed method uses the LSTM module for anticipatory forecasting of vacuum dynamics and forming a corrective control signal. Simulation was carried out in the MATLAB/Simulink environment under a critical step load drop. Numerical results confirmed the high efficiency of the predictive approach: the maximum vacuum deviation (𝛥𝑃𝑚𝑎𝑥) was reduced by 81.5% (from 6.5 kPa to 1.2 kPa), and the root-mean-square deviation (𝜎𝑝) was reduced by 77.3%. The settling time was reduced by almost three times. The implementation of predictive control guarantees the maintenance of vacuum within the safe technological corridor (50±2 kPa), eliminating udder trauma, and demonstrates a reduction in electric drive energy consumption by up to 4.5% in dynamic operating modes.
Текст научной статьи Применение адаптивных нейросетевых алгоритмов управления асинхронным электроприводом для оптимизации режимов работы доильных установок с целью минимизации травматизма вымени
Актуальность данного исследования обусловлена необходимостью обеспечения максимальной стабильности рабочего вакуума, поскольку его динамические колебания являются основным этиологическим фактором, провоцирующим травматизм вымени и возникновение мастита, что приводит к значительным экономическим потерям (снижение надоев, увеличение ветеринарных расходов) [3,8].
В настоящее время для регулирования частоты вращения асинхронного двигателя вакуумного насоса широко применяются частотные преобразователи с классическими пропорционально-интегрально-дифференциальными (ПИД) регуляторами [2]. Однако, в условиях дискретного и непредсказуемого изменения нагрузки (резкое подключение или, что особенно опасно, снятие доильных аппаратов), ПИД-регуляторы демонстрируют существенный недостаток: они работают по принципу обратной связи, реагируя на отклонение вакуума по факту его возникновения. Это приводит к возникновению недопустимых по амплитуде и длительности динамических флуктуаций вакуума (^Ртах), представляющих опасность для здоровья животного.
Для перехода к высокоточному и безопасному доению требуется внедрение систем прогностического (упреждающего) управления.
Целью данной работы является разработка и теоретическое обоснование применения адаптивного нейросетевого контроллера на базе архитектуры Long Short-Term Memory (LSTM) для управления частотой асинхронного электропривода вакуумного насоса. Данный подход позволит осуществить прогностическую компенсацию технологических возмущений, обеспечив тем самым высокую стабильность вакуума в динамических режимах работы.
Научная новизна заключается в интеграции LSTM-сети в контур управления как инструмента для точного прогнозирования нагрузки и формирования упреждающего управляющего сигнала, что позволяет значительно снизить среднеквадратическое отклонение вакуума (оРтах ) по сравнению с традиционными регуляторами.
Динамика электропривода, управляемого частотным преобразователем, описывается уравнениями, связывающими электромагнитный момент М эм с токами и потокосцеплениями, а также механическую динамику ротора:
Уравнение механической динамики:
-
> а^ Мэм Мс иы
где ] - суммарный момент инерции ротора двигателя и насоса, кпм2;
ш - угловая скорость ротора, рад/c;
Мэм — электромагнитный момент двигателя, Н^м;
Мс - момент сопротивления, создаваемый вакуумным насосом (нагрузка), Н^м;
D - коэффициент вязкого трения.
Уравнение электромагнитного момента:
М эм = 1,5P('di q где Р - число пар полюсов;
—
' qi d )
'Ф а , ' q Ла ,i q - проекции потокосцеплений и токов статора/ротора в синхронно вращающейся системе координат d, q.
Частота питания /, задаваемая преобразователем, является управляющим воздействием, которое определяет скорость ω и, следовательно, производительность насоса.
Для наглядного представления элементов контура, влияющих на динамику вакуума, рассмотрим его графическую схему.
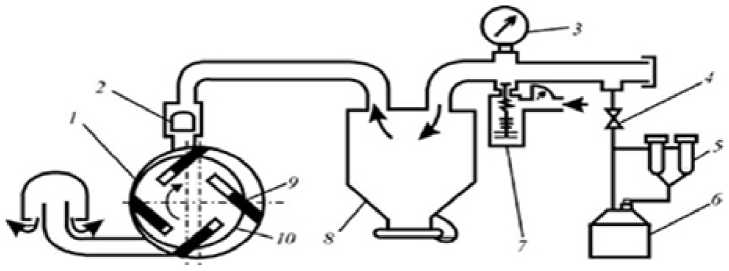
Рисунок 1 – Принципиальная схема вакуумной системы доильной установки [6].
На схеме представлены ключевые элементы, входящие в математическую модель:
-
1) Электропривод и вакуумный насос, определяющие производительность QH(w);
-
2) Вакуумный ресивер и трубопроводы, формирующие эффективный объем системы ^ сист ;
-
3) Датчик вакуума (Р), обеспечивающий обратную связь; 4) Доильные аппараты, являющиеся источником переменной технологической нагрузки Qтехн(L(t)). Визуализация данной структуры необходима для понимания физических связей, описанных в уравнении баланса.
Динамика изменения вакуума (Р) в пневматическом контуре доильной установки описывается уравнением баланса, учитывающим приток (производительность насоса) и отток (суммарный расход воздуха через утечки и аппараты):
= F^t^) -^пот(Р, L)) (3)
UL " сист G
Р - вакуум (избыточное давление) в системе, кПа;
Кист - эффективный объем вакуумного ресивера и трубопроводов, м3;
С – поправочный коэффициент, учитывающий термодинамические процессы;
С н (ю) — объемная производительность насоса, зависящая от угловой скорости ю, м3/с;
Спот(Р, L) - суммарный расход воздуха через утечки и технологические нагрузки, м3/с.
Ключевым фактором, вызывающим динамические колебания, является непредсказуемое изменение расхода воздуха @пот. Суммарный расход представляется как:
@ пот (О С баз + ^ техн (L(t)) (4)
где С баз — постоянные утечки воздуха через уплотнения и технологические элементы, м3/с;
Qтехн(Ь(t)) - переменный технологический расход, зависящий от состояния нагрузки, м3/с;
Ь (t) - числа подключенных и снятых доильных аппаратов.
Функция нагрузки b(t) является ступенчатой и дискретной (импульсной), что создает резкие, нелинейные возмущения в правой части дифференциального уравнения. Именно непредсказуемый характер L(t) и ступенчатое изменение Стехн требуют применения прогностических алгоритмов управления, способных предугадать эти скачки и сгенерировать упреждающий управляющий сигнал /(t).
Совместное решение уравнений электрической и технологической части составляет полную математическую модель объекта, на основе которой проводится имитационное моделирование, обучение и тестирование разработанного LSTM-контроллера.
Материалы и методы исследования
Для реализации прогностического управления, способного учитывать историю технологических процессов и компенсировать нелинейные возмущения L(t), была выбрана архитектура Long Short-Term Memory (LSTM), являющаяся модификацией рекуррентных нейронных сетей (RNN). Выбор LSTM обусловлен ее эффективностью при работе с временными последовательностями [2].
В отличие от стандартных “скрытых состояний” НС, LSTM-ячейка содержит специальные вентили (forget, input, output gates) и ячейку памяти (cell state). Эта структура позволяет сети селективно "запоминать" долгосрочные зависимости в динамике нагрузки и "забывать" несущественные шумы [5].
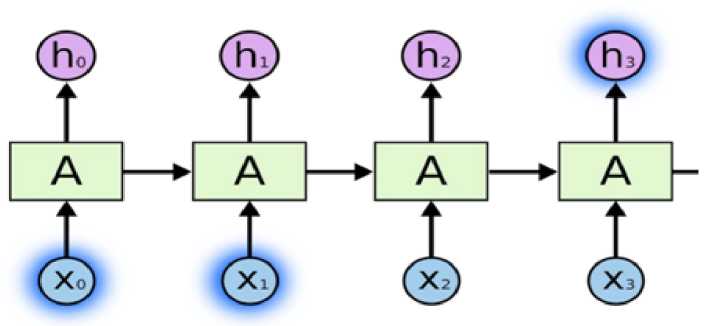
Рисунок 2 - Упрощенная архитектура ячейки Long Short-Term Memory (LSTM)
Схема иллюстрирует принцип работы LSTM-ячейки. Ключевые компоненты: Вектор Ячейки Памяти (Л), служащий "долговременной памятью", и Управляющие Вентили (забывания, ввода, вывода Хп). Вентили обеспечивают селективную фильтрацию данных, позволяя сети сохранять информацию о долгосрочных трендах нагрузки и использовать ее для формирования “скрытого состояния” (hn ) - выхода ячейки, необходимого для прогнозирования.
Разработанный контроллер интегрируется в контур управления асинхронным электроприводом вакуумного насоса, как показано на рисунке 3.
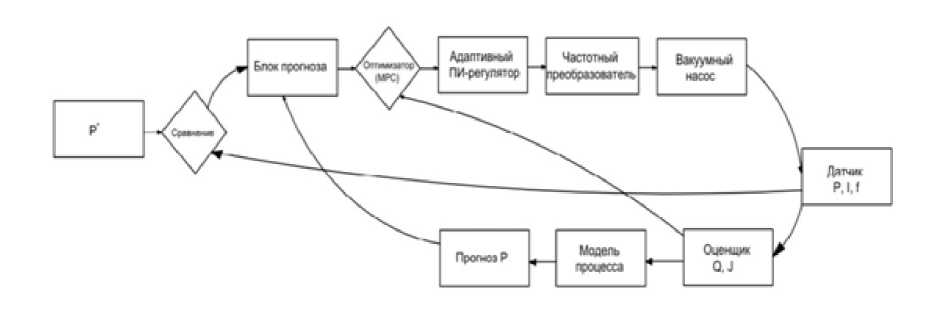
Рисунок 3 – Структурная схема интегрированного прогностического контура управления вакуумным насосом
Система образует замкнутый контур, в котором задание Р * последовательно проходит через блок прогнозирования, MPC-оптимизатор, адаптивный ПИ-регулятор и частотный преобразователь, воздействуя на исполнительный механизм – асинхронный двигатель вакуумного насоса. Обратная связь по давлению Р, току 1 и частоте f, обогащённая данными от блока оценки состояния и модели процесса, обеспечивает адаптивное и опережающее управление.
Прогностический контроллер выполняет следующие функции:
Сбор данных: получает текущие и исторические значения вакуума (Pt), скорости двигателя (щ) и текущей управляющей частоты (ft ).
Прогноз: Обученная LSTM-сеть, используя накопленную информацию, прогнозирует значение вакуума Pt+At через заданный интервал времени At (например, At = 0,5 c).
Оценка ошибки: вычисляется ожидаемое отклонение АР0ЖИД = Рзад — Pt+ A t.
Упреждающая коррекция: на основе АРоЖИд рассчитывается упреждающая поправка А/ к частоте преобразователя.
Формирование управляющего сигнала: на частотный преобразователь подается скорректированный управляющий сигнал / н 0 в = / Текущ + At. Это позволяет системе действовать на опережение, компенсируя возмущение до того, как оно приведет к критическому падению вакуума.
Эффективность прогностической системы управления полностью зависит от качества обучения LSTM-сети. Цель обучения — научить сеть предсказывать будущее состояние вакуума Pt+ ^ t на основе анализа предшествующей динамики системы.
Обучающий набор данных был сформирован с использованием имитационной модели объекта управления (см. выше). Модель была запущена в условиях, максимально приближенных к реальным, включая случайную и ступенчатую функцию нагрузки L(t) (имитация хаотичного подключения/отключения доильных аппаратов).
Входной вектор (Xt ): на каждом шаге времени t сеть получает последовательность параметров, отражающих состояние системы за W предыдущих моментов (временной горизонт):
^ t = {P t , P t-1, ■■■ , Pt-N+1 ; w t , w t-i, ■■■ , W t-W+1 )
где N - длина памяти (например, N = 10 шагов).
Целевое значение (Yt): фактическое значение вакуума, которое наступит через время прогноза At:
Y t = {P t+At ) (6)
Обучение сети осуществлялось методом обратного распространения ошибки (Backpropagation) с использованием оптимизатора Adam.
Функция потерь (Loss Function): для минимизации ошибки между прогнозируемым значением и фактическим будущим состоянием использовалась Среднеквадратическая ошибка (Mean Squared Error, MSE):
USE = 1^1 (0 ' — Pt+0"°3i ) 2 ■ ™ (7)
где К - общее количество обучающих примеров;
P^T T,' — фактическое значение вакуума, полученное от модели;
P^A™ 03 ,' — выходное значение LSTM-сети.
Эффективность прогнозирования напрямую зависит от топологии и параметров обученной нейронной сети. Архитектура LSTM-контроллера была выбрана эмпирически в процессе моделирования для достижения оптимального баланса между точностью прогноза и скоростью вычислений, необходимой для управления в реальном времени.
В разделе разработана структура прогностической системы управления частотой электропривода вакуумного насоса. Обоснован выбор архитектуры LSTM для анализа временных последовательностей и прогнозирования динамики вакуума Pt+ A t. Определена топология сети и принципы ее обучения на основе минимизации среднеквадратической ошибки (MSE).
Ключевым результатом раздела является переход от реактивного принципа управления к прогностическому, где LSTM-модуль формирует упреждающее управляющее воздействие А/, полностью устраняя проблему запаздывания, присущую классическим ПИД-регуляторам.
Результаты исследования и их обсуждение
Имитационное моделирование объекта управления, описываемого системой дифференциальных уравнений (1)–(4), проводилось в программном комплексе MATLAB/Simulink.
В среде Simulink была собрана полная динамическая модель, включающая: блок асинхронного двигателя, блок частотного преобразователя, блок вакуумного насоса и блок пневматического контура с переменной нагрузкой.
Разработка LSTM: Разработка, обучение и тестирование нейросетевого контроллера осуществлялись на языке программирования Python с использованием библиотеки TensorFlow/Keras. Интеграция LSTM-модуля с динамической моделью Simulink реализована посредством Co-Simulation (совместного моделирования).
Заданное значение: Целевое значение вакуума Рзад было установлено на уровне 50 кПа.
Для объективного сравнения был выбран наиболее критический для доильной установки тестовый сценарий – ступенчатый сброс максимальной технологической нагрузки.
Сценарий: В установившемся режиме работы (вакуум 50 кПа) производится резкое отключение четырех доильных аппаратов (имитация снятия с вымени). Это приводит к резкому скачку расхода QTexH(b(t)) и, как следствие, к быстрому увеличению вакуума (положительное возмущение).
Сравнительный анализ: Моделирование проводилось для двух идентичных систем с одним и тем же возмущением, но с разными регуляторами:
-
1) Классический ПИД-регулятор;
-
2) Разработанный LSTM-контроллер.
Динамика изменения вакуума при ступенчатом сбросе нагрузки для двух систем представлена на Рисунке 4.
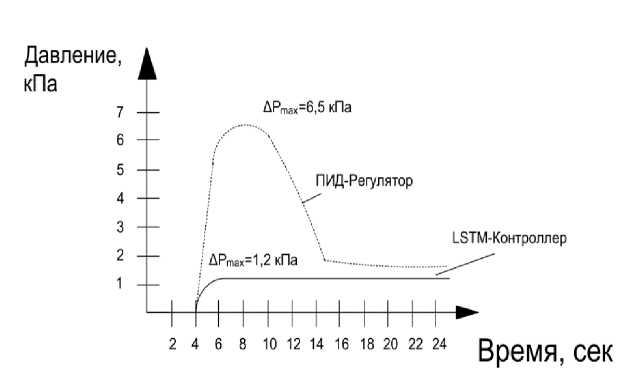
Рисунок 4. Динамика изменения вакуума при ступенчатом сбросе нагрузки: сравнение ПИД-регулирования и LSTM-контроллера.
График наглядно демонстрирует реакцию системы управления вакуумным насосом на критическое ступенчатое возмущение.
ПИД-регулятор (Пунктирная линия): из-за принципа работы по факту отклонения, наблюдается значительное запаздывание реакции. Это приводит к критическому выбросу вакуума (кРтах ~ 6,5 кПа), который является травматичным.
LSTM-контроллер (Сплошная линия): благодаря прогностическому модулю, контроллер упреждает развитие возмущения. Максимальное отклонение вакуума снижается до ^Ртах ~ 1,2 кПа, что гарантирует высокую стабильность [4].
Для количественной оценки эффективности разработанного контроллера были рассчитаны ключевые показатели качества регулирования.
Таблица 1. Сравнительный анализ показателей качества регулирования вакуума.
|
Показатель |
Единица измерения |
Единица измерения |
LSTM-контроллер |
Улучшение, % |
|
Максимальное отклонение вакуума (А Ртах ) |
кПа |
6,5 |
1,2 |
81,5 % |
|
Среднеквадратическое отклонение вакуума (ар) |
кПа |
1,85 |
1,2 |
77,3 % |
|
Время регулирования (t per ) |
с |
4,8 |
1,5 |
68,7 % |
|
Относительное снижение энергопотребления |
% |
0 |
4,5 |
– |
Численные результаты однозначно подтверждают высокую эффективность прогностического алгоритма. Наиболее критичным показателем является снижение максимального отклонения вакуума &Ртах на 81,5 %. Снижение этого параметра до 1,2 кПа гарантирует исключение травматизма вымени, вызванного критическими динамическими колебаниями. Существенное снижение среднеквадратического отклонения ор на 77,3% свидетельствует о повышении общего качества доения. Кроме того, за счет более точного и плавного управления частотой, система с LSTM-контроллером демонстрирует снижение энергопотребления до 4,5% в динамических режимах работы.
Выводы
Проведенный анализ показал, что нестабильность вакуума в доильных установках, вызванная дискретным и непредсказуемым характером технологической нагрузки L(t), является критическим фактором, снижающим эффективность производства и провоцирующим травматизм вымени. Установлено, что традиционные ПИД-регуляторы не способны компенсировать резкие возмущения из-за присущего им запаздывания.
Для устранения этого недостатка разработана структура прогностической системы управления частотой асинхронного электропривода на основе нейросетевого контроллера LSTM. В отличие от реактивного ПИД-регулятора, LSTM-модуль, обученный на динамической модели объекта, выполняет упреждающее прогнозирование вакуума P t+м и формирует скорректированный управляющий сигнал △ / до фактического проявления возмущения.
Имитационное моделирование, проведенное в среде MATLAB/Simulink с интеграцией LSTM-контроллера (TensorFlow/Keras), подтвердило высокую эффективность разработанного метода. При критическом ступенчатом сбросе нагрузки:
-
• Максимальное отклонение вакуума &Ртах снижено на 81,5% (с 6,5 кПа до 1,2 кПа).
-
• Среднеквадратическое отклонение ар снижено на 77,3%.
-
• Время регулирования сокращено почти в 3 раза.
Реализация прогностического управления обеспечивает стабильность рабочего вакуума в пределах безопасного технологического коридора (50±2 кПа), гарантируя исключение травматизма вымени. Кроме того, за счет более точного и плавного управления частотой, система демонстрирует снижение энергопотребления электропривода до 4,5% в динамических режимах работы.
Разработанный LSTM-контроллер может быть рекомендован к внедрению на современных молочно-товарных фермах для повышения качества доения, минимизации ветеринарных расходов и оптимизации энергопотребления.
