Применение дифференциального электропривода в автомобильной промышленности

Автор: Белоусов Е.В., Григорьев М.А., Савостеенко Н.В.
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электротехнические комплексы и системы
Статья в выпуске: 3 т.23, 2023 года.
Бесплатный доступ
Для повышения безопасности движения электромобиля на трассе необходимо обеспечить высокий темп разгона при движении на высокой скорости для возможности осуществления маневра обгона. Для этого предлагается реализовать электропривод на базе двух двигателей. В статье рассматривается вопрос устойчивости работы системы с двухканальным регулированием скорости автономных электротранспортных средств, где один канал является «высокомоментным» приводом, в котором двигатель подключен через редуктор с понижающим коэффициентом передачи, а второй канал - «высокоскоростным», в котором аналогичный по габаритам двигатель подключен напрямую. Суммирование мощности двух каналов осуществляется путем применения дифференциального редуктора. В статье показано, что добиться устойчивой работы возможно путем фиксации задания скорости по одному каналу и регулированию по другому каналу, представлены алгоритмы управления. Определены оптимальные значения передаточного числа редуктора «высокомоментного» канала и коэффициента включения (доли в переходном процессе) высокомоментного канала, при которых наблюдается минимум времени переходного процесса. Проведены расчеты для легкового автомобиля и грузового автомобиля массой до 7,5 т. Данное решение позволяет повысить динамику движения автомобиля, расширить диапазон регулирования по скорости и моменту, а также повысить энергоэффективность электроустановки в целом, так как каждый из двигателей в предложенной схеме большую часть времени работает в режиме, близком к номинальному.
Дифференциальный редуктор, двухканальный электропривод, безопасность движения
Короткий адрес: https://sciup.org/147241283
IDR: 147241283 | УДК: 68-83 | DOI: 10.14529/power230307
Application of differential electric drive in the automotive industry
The safety of an electric vehicle on the highway can be improved by a high rate of acceleration when driving at high speed before overtaking. It can be reached by implementing an electric drive based on two motors. The article considers the stability of the system with two-channel speed control of autonomous electric vehicles. While one channel is a “high-torque” drive, in which the engine is connected through a reducer with a reduction ratio, the second channel is a “high-speed” one, in which a similar-sized engine is connected directly. The summation of the power of the two channels is carried out by using a differential gearbox. The article shows the possibility of achieving stable operation by fixing the speed reference on one channel and regulating it on another channel and presents control algorithms. It also determines the optimal values of the gear ratio of the gearbox of the “high-torque” channel and the switching ratio (share in the transient process) of the high-torque channel with a minimum of the transition process time. The calculations concern a passenger car and a truck weighing up to 7.5 tons. This solution allows for increasing the dynamics of the car, expanding the range of regulation in terms of speed and torque, and improving the energy efficiency of the electrical installation as a whole. Each of the engines in the proposed scheme most of the time operates in a mode close to the nominal.
Текст научной статьи Применение дифференциального электропривода в автомобильной промышленности
В условиях серьезного ограничения импортного оборудования важным является создание отечественных автомобилей, надежных, не требующих больших затрат на обслуживание [1]. Так, эксплуатация электромобилей не требует замены масла, топливного и масляных фильтров, обслуживания коробки передач, существенно снижаются затраты на обслуживание тормозной системы за счет использования рекуперативного торможения. Помимо этого, эксплуатация электромобилей на базе никель-кадмиевых элементов питания позволит существенно развить производство аккумуляторных ячеек [2].
Развитие автономного (беспилотного) электротранспорта является мировым трендом. Задачей экономики является не просто следование тренду, а обеспечение импортоопережения. Предъявляются новые требования к тяговым характеристикам автомобиля, обусловленные повышением безопасности движения. Электрический привод должен обеспечивать требуемые ускорение, интенсивность торможения и маневренность. Как было подробно показано в [3], наиболее перспективным вариантом исполнения электроустановки автомобиля является двухдвигательный электропривод.
Использование двух двигателей, приводящих в движение переднюю и заднюю оси полноприводного автомобиля, делает его более маневренным. При этом повышается надежность всей электроустановки ^ при отказе одного из двигателей имеется возможность продолжить движение только на оставшемся. Наконец, такое решение позволяет повысить энергоэффективность всей установки в целом, так как за счет приведения в движение колесных осей посредством редукторов с различными передаточными числами каждый из двигателей работает в режиме, близком к номинальному.
Сложение энергии моторов производится за счет дифференциального редуктора, который механически соединен с валами двигателей и колесной парой. Скорость на выходном валу диффре-дуктора равна [4]
юв = 2g g (ю1 +®2 ). (1)
Мощность на выходном валу складывается из мощностей на входных валах:
ю в М B = ю 1 М 1 + ю 2 М 2 . (2)
Подставив (2) в (1), получим зависимость момента на выходном валу от скоростей и моментов входных валов:
2 (ю, М , +ю2 М2)
М в g = ( 11 2 2 )
.
Как видно из (3), серьезной проблемой является устойчивость регулирования – момент на выходном валу зависит от четырех переменных. При одновременной работе двух контуров регулирования момента невозможно получить устойчивую систему. Для решения этой проблемы создаются два независимых контура регулирования скорости каждого из двигателей.
Фиксируя скорость по одному из каналов и регулируя ее другим каналом, можно добиться устойчивости работы системы целиком. Так, например, на начальном этапе разгона требуется осуществлять регулирование «высокомоментным каналом», при его насыщении дальнейший разгон осуществлять «высокоскоростным каналом». При движении на высокой скорости и необходимости дальнейшего ускорения производить его путем регулирования скорости «высокомоментным» каналом.
При насыщении по скорости «высокомоментного» канала необходимо зафиксировать его скорость и осуществлять регулирование по «высокоскоростному» каналу. Поиск оптимального соотношения по регулированию одним или вторым каналом является задачей в статье. В работе использованы материалы квалификационной работы В.С. Шалькова «Двухканальный дифференциальный электропривод автономного электротранспортного средства», выполненной под руководством Е.В. Белоусова в 2018 г. [5].
На рис. 1 представлена функциональная схема формирования сигналов задания на момент двигателей в двухдвигательной системе тягового электропривода, математическая модель которой подробно описана в [3]. Блок М1 формирует сигнал задания на момент «высокомоментного» двигателя, в этом канале между валом двигателя и планетарным редуктором дополнительно подключена зубчатая передача с передаточным числом j . М2 – сигнал задания на момент «высокоскоростного» канала, здесь между электрической машиной и диффредуктором отсутствуют промежуточные звенья, прямое подключение. Как отмечалось вы-
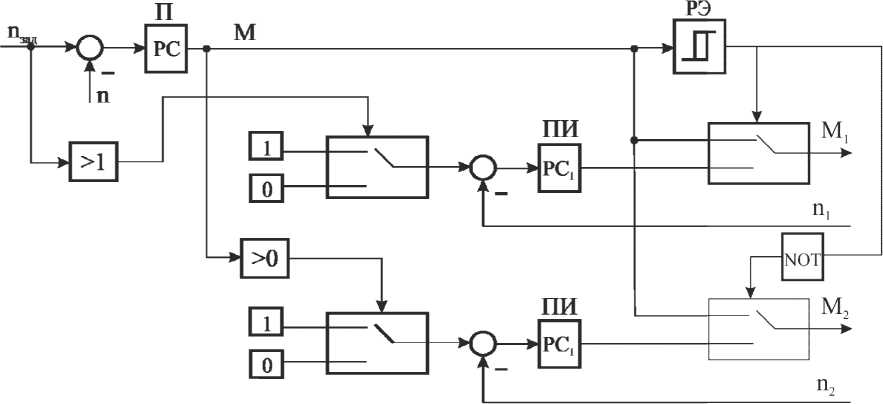
Рис. 1. Функциональная схема формирования сигналов задания на момент двигателей в двухдвигательной системе тягового электропривода
Fig. 1. Functional diagram of the generation of signals for setting the torque of motors in a two-motor traction electric drive system
ше, регулирование в системе осуществляется только по одному из каналов. Общий сигнал зад а ния по моменту на двухдвигательны й привод формулируется регулятором скорости РС. Ско рость в одном из каналов фиксируется и прира в нивается к нулю или единице (скорости холостого хода). В том канале, где скорость зафиксирована, сигнал задания на момент идёт с регуляторов РС 1 и РС2 для перво го и второго канала соответстве н но. В качестве регуляторов скорости РС 1 и РС2 используются ПИ- регуляторы, что позволяет д о биться более высокого качества переходных пр о цессов: при требуемом быстродействии добиться высокой точности переходных процессов. Регу ля тор скорости РС выполнен на базе П -регулятор с коэффициентом усиления k РС , задачей которого является обеспечение высокого быстродействия.
Сформированный для всего привода сигнал задания момента М подаётся на первый или второй канал, в зависимости от того, по какому каналу идёт регулирование. Реализуется эта функция п о средством релейного элемента РЭ. Если сигнал задания на момент М > к п ( n з ад - n ) к РС , то релей ный элемент РЭ выдаёт единицу и регулирование осуществляется по первому к аналу, то есть М 1 = М , где к п - доля времени работы «высок о моментного» двигателя в общем времени перехо дного процесса. Если М < к п ( n зад - n ) к РС , то релей ный элемент выдаёт 0, момент в первом канале формируется регулятором скорости РС 1, а М 2 = М . Система организована так, что подача сигнала М возможна только на один канал, подача сигнала на оба канала взаимоисключающая [ 5, 6].
Фиксированная скорость в первом и втором канале опреде ляется разными условиями. В «в ы сокомоментном» канале скорость фиксируется на
«1» тогда, когда сигнал задания больше 1, т. е. требуется высокая интенсивность разгона. Причем не важно, во время пуска или при движении на высокой скорости. В остальных случаях скорость данного канала фиксируется на «0».
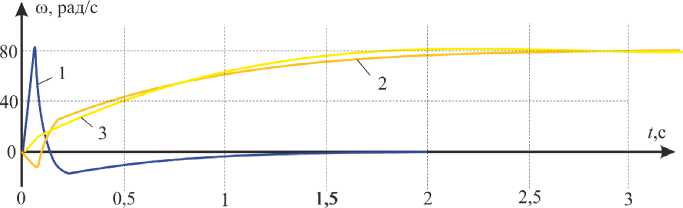
В высокоскоростном канале выбор фиксированной скорости осуществляется иначе. При положительном сигнале М скорость фиксируется на 1, при отрицательном или равном нулю сигнале М скорость фиксируется на «0». На рис. 2 приведены осциллограммы переходных процессов, полученные на модели в программном комплексе MATLAB Simulink.
Рассмотрим участок по времени от 0 до 2 с. Здесь регулирование осуществляется по «высокомоментному» каналу, скорость во втором канале при этом фиксируется на 1. Затем скорость высокомоментного канала фиксируется на нуле и регулирование осуществляется по «высокоскоростному» каналу.
На участке от 2 до 4 с сигнал задания на скорость больше 1. На этом участке моделируется манёвр обгона – разгона при движении на высокой скорости. Здесь скорость высокоскоростного канала фиксируется на единице. В «высокомоментном» канале вначале идёт регулирование и интенсивный разгон, а при насыщении канала скорость фиксируется на единице.
На участке от 4 с и далее моделируется тормозной режим. Регулирование скорости в этом случае осуществляется по «высокоскоростному» каналу, а двигатель в высокомоментном канале затормаживается.
На рис. 2 представлены осциллограммы для идеальной модели. В реальности необходимо учесть возможность насыщений по скорости двигателя в «высокомоментном» канале. Для модели-
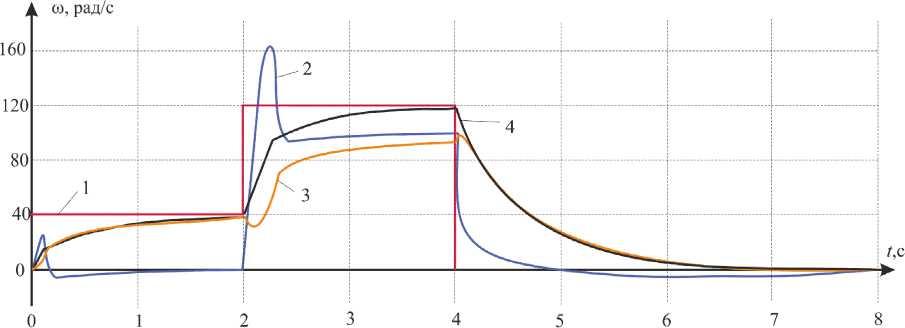
Рис. 2. Осциллограммы скоростей «высокомоментного» канала с дополнительной передачей j = 4 (2), «высокоскоростного» канала (3), выходного вала диффредуктора (4) и сигнала задания на скорость (1) при k п = 0,3 Fig. 2. Oscillograms of speeds “high-torque” channel with additional transmission j = 4 (2), “high-speed” channel (3), differential reductor output shaft (4) and speed reference signal (1) at k п = 0.3
рования переходных процессов с учетом указанных ограничений в систему, представленную на рис. 1, вводятся дополнительные элементы, пред-ставеленные на рис. 3а, где Ch – сигнал, отвечающий за выбор канала регулирования, равен единице, если на выходе РЭ сигнал равен единице, а на РЭ1 – «0». РЭ1 выдаёт единицу, если скорость двигателя n1 превышает 1,5 nxx и ноль, если скорость двигателя n1 меньше 0,95 от скорости холостого хода.
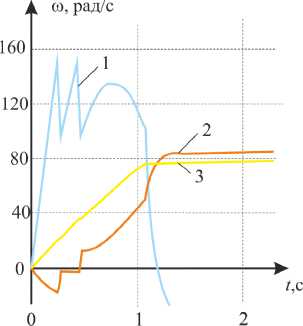
На рис. 3b представлен переходный процесс разгона для таких сочетаний k п и j , при которых регулирование осуществляется большую часть времени только по одному из каналов. Таким образом, задача сводится к тому, чтобы найти, при каких k п и j время разгона будет минимальным.
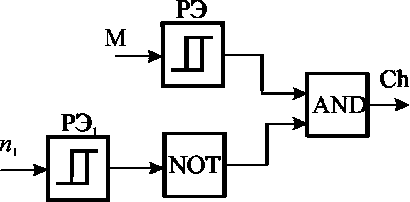
а)
b)
с)
Рис. 3. Функциональная схема ограничения сигнала задания по скорости высокомоментного двигателя (а), осциллограммы скоростей первого двигателя (1), второго двигателя (2) и выходного вала диффредуктора (3) при разгоне преимущественно на высокомоментном приводе (b) и преимущественно на высокоскоростном двигателе (c)
Fig. 3. Functional diagram of limiting the speed reference signal of a high-torque motor (а), oscillograms of the speeds of the first motor (1), the second motor (2) and the output shaft of the differential reductor (3) during acceleration mainly on a high-torque drive (b) and mainly on a high-speed motor (c)
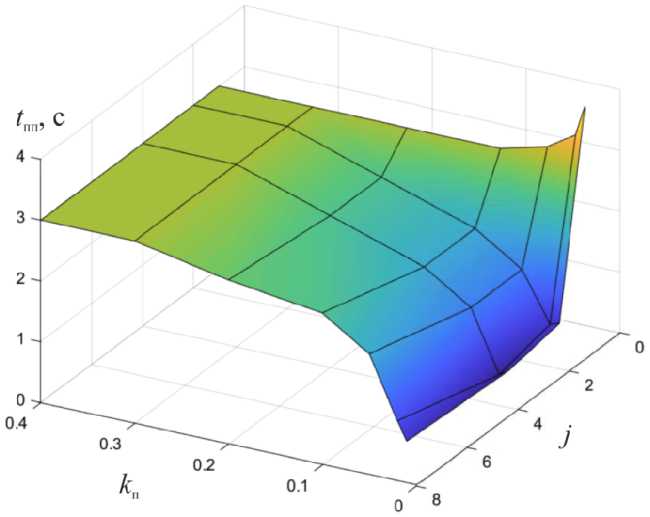
Рис. 4. Зависимость времени переходного процесса t пп от передаточного числа редуктора «высокомоментного» канала j и доли времени работы «высокомоментного» канала k п
Fig. 4. Dependence of the transition process time t пп on the gear ratio of the gearbox of the “high-torque” channel j and the share of the operating time of the “high-torque” channel k п
Зависимость времени переходного процесса от k п и j показана на рис. 4.
При j = 1 эффекта от двухканального регул и рования не наблюдается. Сколько бы времени не работал второй канал, общее врем я разгона не уменьшается, при малых k п даже наблюдается о трицательный эффект. При j = 8 время разгона п о лучается большим, чем в случае, если j = 4 или j = 2. Объясняется это скорым насыщением «выс о комоментного» канала. При малых k п время разгона становится меньше в связи с тем, что почти всё время работает именно двигатель в высоком о ментном канале. Если уменьшить k п еще меньше 0,02, то это спровоцирует дополнительные и з держки на переходные процессы, что только ув е личит общее время разгона. Самое меньшее время разгона удалось достичь при j = 4 и k п = 0,02. При этом отметим, что в зависимости от характера н а грузок оптимальное соотношение j и k п может быть другим.
Также следует отметить, что точка оптимума будет смеща ться в зависимости от массы автом о биля. Зависимость, приведенная на рис. 4, харак терна для легкового автомобиля. В случае с тран с портными средствами коммерческого назначения, такими как грузовые автомобили массой до 7,5 т, доля времени разгона при регулиро вании «высо комоментным каналом» будет возрастать. Перед аточное число j варьируется в тех же пределах. М и нимальное время разгона для автомобиля «Газель
Некст» наблюдается при k п и j , равными 0,36 и 6 соответственно. Аналогично можно провести расчеты и для более крупных грузовых автомобилей массой более 7,5 т.
Выводы
Представленная в данной работе упрощенная математическая модель демонстрирует потенциальные возможности применения двухканального электропривода в автономных транспортных средствах. Комбинированное сочетание работы двух приводов позволяет добиться меньшего времени переходного процесса по сравнению с однодвигательной электроустановкой, особенно при разгоне на высокой скорости [5].
Решена задача поиска оптимального передаточного числа редуктора «высокомоментного» канала и доли времени его работы в переходном процессе разгона. Полученные результаты позволяют создать электропривод автомобиля с возможностью осуществлять разгон с высоким темпом, причем даже при движении на высокой скорости.
Уточненная математическая модель каждого из двух асинхронных двигателей позволит расширить возможности регулирования – индивидуальное задание на момент и поток каждого из двигателей позволит повысить эффективность электропривода в целом, так как появится возможность работы в режиме ослабления поля.
Список литературы Применение дифференциального электропривода в автомобильной промышленности
- Колпаков А.Ю., Галингер А.А. Экономическая эффективность распространения электромобилей и возобновляемых источников энергии в России // Вестник Российской академии наук. 2020. Т. 90, № 2. С. 128-139. EDN: JCGEJZ
- Перспективы разработки никель-металлогидридной батареи для электромобиля с энергоустановкой на топливных элементах / А.С. Стихин, В.И. Тесля, А.П. Цедилкин, А.С. Швецов // Электрохимическая энергетика. 2008. Т. 8, № 3. С. 168-173. EDN: KVKBGB
- Белоусов Е.В., Григорьев М.А., Грызлов А.А. Тяговый электропривод электротранспортных средств // Электротехника. 2017. № 4. С. 2-6. EDN: WDWGXM
- Мясников Г.В., Моисеенко Е.И. Многоскоростные планетарные механизмы в приводах горных машин. М.: Недра, 1975. 264 c.
- Шальков В.С. Двухканальный дифференциальный электропривод автономного электротранспортного средства: пояснительная записка к выпускной квалификационной работе. Челябинск: ЮУрГУ, Э; 2018, 45 с.
- Буканова Т.С., Алиев М.Т. Экспериментальное исследование электропривода на основе двухроторной электрической машины с дифференциальным управлением // Мехатроника, автоматизация, управление. 2018. Т. 19, № 9. С. 618-624. DOI: 10.17587/mau.19.618-624 EDN: XZPFCH
