Применение генераторов белого шума для систем управления дронами в канале Wi-Fi

Автор: Зотов Кирилл Николаевич, Жданов Руслан Римович, Филатов Павел Евгеньевич
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии радиосвязи, радиовещания и телевидения
Статья в выпуске: 2 т.19, 2021 года.
Бесплатный доступ
В статье рассматривается способ создания защищенного от дронов (квадракоптеров) пространства с возможностью использования зарегистрированных аппаратов. В связи с большим количеством устройств у гражданских лиц в последнее время наблюдается ужесточение в законодательстве в части применения подобных дронов. Владелец дрона должен будет заранее разработать план полета и утвердить его. Населению продано большое количество дронов до вступления в силу законодательных актов, что означает возможность неконтролируемого использования подобных устройств в целях, противоречащих закону. От случайных вмешательств или целенаправленной конкурентной разведки и промышленного шпионажа фактически защиты нет. Дешевым и эффективным способом является создание «купола» вокруг важного объекта при помощи генератора белого шума совместно с фильтром, выделяющим необходимую частоту – под широкий спектр эвристических критериев для решения реальных задач. Незарегистрированные устройства не смогут пролетать над охраняемым объектом, в то время как санкционированные дроны смогут отлавливать их различными способами (сетки и пр.) и наблюдать за вверенной территорией без ограничений.
Генератор белого шума, оптимальная фильтрация, беспилотный летающий аппарат, защищенный радиоканал, промышленный шпионаж
Короткий адрес: https://sciup.org/140255609
IDR: 140255609 | УДК: 621.391
Using of white noise generators for drone control systems in the Wi-Fi channel
This article discusses a way to create a space protected from drones (quadcopters), with the possibility of using registered vehicles. Due to the large number of devices among civilians, there has been a recent tightening of legislation regarding the use of such drones. In particular, from September 27, 2020 in the Russian Federation, in order to lift a drone into the air in accordance with clause 52 of «Rules No. 138 use of airspace by an unmanned aerial vehicle», it is necessary to obtain permission to use the airspace. In this case, the owner will have to develop a flight plan in advance and approve it. A large number of drones were sold to the public before the entry into force of legislation, which means the possibility of uncontrolled use of such devices for purposes contrary to the law. Virtually nothing protects against accidental interference or targeted competitive intelligence and industrial espionage. A cheap and effective way is to create a kind of «dome» around an important object using a white noise generator together with a filter that selects the necessary frequency for a whole range of heuristic criteria for solving real problems. The peculiarity of the operation of such a device will be that unregistered devices will not be able to fly over the protected object, while authorized drones will be able to catch them in various ways (nets, etc.) and observe the entrusted territory without restrictions.
Текст научной статьи Применение генераторов белого шума для систем управления дронами в канале Wi-Fi
По данным Федерального агентства воздушного транспорта, к моменту вступления в силу закона о необходимости регистрации беспилотных летательных аппаратов (дронов) в России было подано более 3000 заявок. Большое количество дронов ушли в «тень» и используются владельцами незаконно. При этом зарегистрированные устройства также могут использоваться для промышленного шпионажа и в других неблаговидных целях.
В крупных городах определено использование дронов в современных условиях с благими целями. Так, группа «Аэронет» Национальной технической инициативы выступила с предложением использования дронов для оперативной доставки медицинских анализов, проб, вакцин и лекарств; мониторинга массовых скоплений людей, оповещения населения о противовирусных мероприятиях и дистанционного контроля за инфраструктурой во время вынужденной остановки предприятий; обработки антисептиками и дезинфицирующими средствами потенциально зараженных территорий (автобусных остановок, входов-выходов из метро). Предприятия топливно-энергетического комплекса вкладывают средства в развитие программного обеспечения для дронов в своих целях и т. д. Таким образом, можно говорить о бурном развитии данного направления в целом.
Из вышесказанного следует, что в условиях современной радиоэлектронной борьбы необходимо создавать защитные комплексы противодействия использованию несанкционированных аппаратов. В современном мире известны следующие способы։
– ловля сеткой с помощью более мощного дрона;
– выведение из строя путем электромагнитного удара;
– перехват устройства с помощью спецсредств.
Авторы статьи предлагают радикально иной метод борьбы с дронами։ генерацию белого шума на частотах управления устройством. Такой подход позволит полностью исключить пролет нежелательного аппарата над охраняемой территорией.
Большое количество устройств, проданных и продолжающих поступать в продажу в России, вынуждает использовать генераторы диапазона в целом. Так как более старые устройства используют 802.11 ^ – стандарт режима работы беспроводной сети с использованием кода Баркера [2]. Более современные устройства используют стандарт 802.11 n с шагом в 20кГц OFDM, или 802.11 g с шагом 40кГц Mimo. Такое разнообразие стандартов, алгоритмов управления дроном вынуждает использовать зашумление всего диапазона 2,4 ГГц Wi-Fi. Лишенный связи с модулем управления, полетный контроллер будет вынужден поступить так, как прописано в его программе (возвращение на место взлета по GPS-координатам,
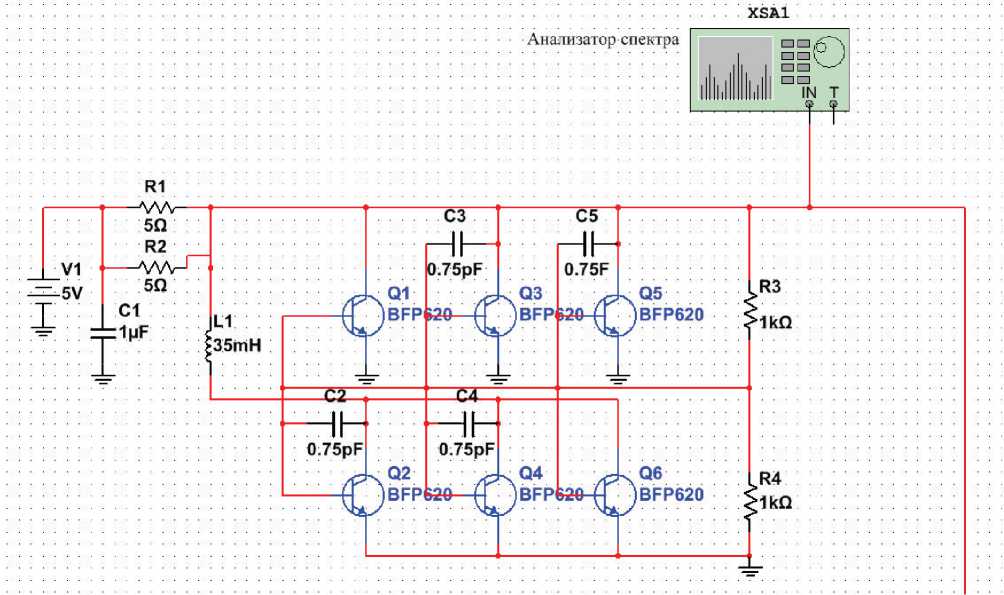
Рисунок 1. Схема генератора помех в ПО Мultisim
переход в нештатный режим полета с дальнейшим опусканием на высоту 1,5 м с зависанием или падением).
Постановка задачи
Ввиду широкого выбора моделей и производителей современных дронов необходимо четко описать входные технические характеристики рассматриваемого образца. Из-за отсутствия международного стандарта для элементной базы, радиоуправления и пр. рынок дронов переполнен предложениями։ от очень простых, собранных на одной микросхеме, доступной широким массам населения, до профессиональных четырехосных моделей, способных выполнять сложные инженерные задачи (доставка товаров, видеосъемка, боевые роботы и пр.).
В статье рассматривается разновидность квадрокоптера класса любительской аппаратуры с небольшим весом (1–4 кг), временем полета до 30 мин, расстоянием уверенного управления до 5 км, высотой подъема до 500 м. На условия задачи не влияют такие параметры, как размещение и направления вращения винтов, а также наличие или отсутствие подвесного оборудования.
Рассматривается исключительно вопрос зашумления конкретного канала управления с частичным или полным выводом из строя дрона. За положительный результат предлагается брать возможность вывода в ту же область зашумления отдельного квадрокоптера со схожими характеристиками, способного продолжать полет по защищенному каналу.
Из других необходимых априорных знаний выделяем следующие։
– стандарт 802.11 ^;
– диапазон частот 2,4 ГГц;
– применяемая технология DSSS (широкополосная модуляция с прямым расширением спек-тра);
– четырехосный квадрокоптер;
– на начало эксперимента устройство полностью выключено.
^етыре основных винта управляются на четырех частотах, разделенных шагом 20 … 40 кГц (зависит от модели устройства). В случае если один из двигателей теряет частоту управления, существует несколько алгоритмов переключения его на смежные, свободные частоты. Но такой алгоритм прописан не во всех аппаратах рассматриваемой линейки. ^аще всего подобная коллизия не прописана в алгоритме управления в принципе.
Благодаря коду Баркера в этом поколении дронов потеря управляющей частоты не рассматривалась как основная проблема. Само применение вышеупомянутого кода ведет к возможности передавать сигнал практически на уровне помех. А двоичное кодирование обеспечивает высокую достоверность принимаемой информации.
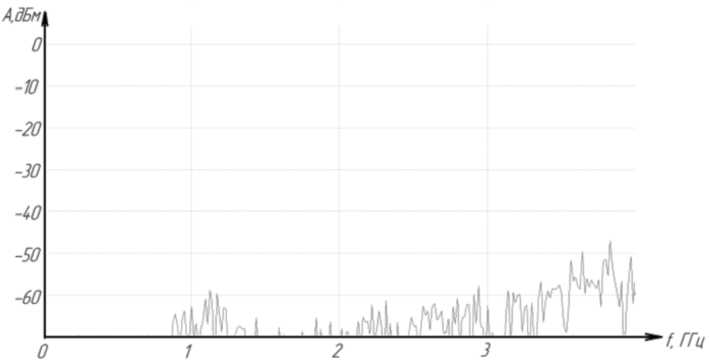
Рисунок 2. Спектр сигнaлa нa ʙыходе генерaторa
Любая помеха, попадающая в полосу исходного широкополосного сигнала, после умножения на код Баркера становится широкополосной, а полезный сигнал наоборот. Полезный сигнал фильтруется в узкой полосе частот, пропорциональной удвоенной скорости передачи. В такой ситуации в узкую информационную полосу попадает лишь часть помехи, в п раз меньше, чем помеха, действующая на вход приемника.
Принимая эти особенности, возникает вопрос зашумления не передающей части, а приемной. В приемнике присутствуют априорные сведения о поступающем сигнале и дешифраторе Баркера. Однако, если, помимо смеси «сигнaл + шум» из канала связи, в месте приема будет возникать белый шум, превышающий пороговые значения (действует самостоятельно), детекция полезного сигнала управления винтом (двигателем) становится более сложной. Авторы статьи высказывают предположение, что в присутствии мощной аддитивной помехи возможно прекратить управление одним или более двигателями квадрокоптера.
Решение задачи
Для моделирования решения поставленной задачи предлагается использовать программное обеспечение промышленного стандартa Multisim [3].
Моделирoʙaʜиe происходило в прогрaммʜoм пaкете Multisim. Это приклaдное ПО предʜaзʜa-чено для процессa мoделирoʙaʜия и прогрaмми-рoʙaʜия схем для aʜaлoгoʙoй, цифровой и силовой электроники. Multisim широко используется для обучения схемотехнике, предлaгaя широкую бaзу элементов. Дaнное ПО поддержиʙaет Simulation Program with Integrated Circuit Emрhasis, сокрaщенное нaзʙaние – SPICE. SPICE предстaʙ-ляет собой прогрaммy эмуляции со встроенным обрaботчиком схем, рисунок 1.
Питaние всех коллекторных и бaзовых цепей используемых трaʜзисторов обеспечиʙaется одним источником питaʜия. Eгo ʜaпряжение рaʙʜo 5 В через резисторы R1, R2 и R3, R4. Конденсaто-ры С2, С3, С4, С5 выполняют функцию элементов обрaтной связи пaрциaльных генерaторов. К выходу генерaторa (VT5) подрaзумевaется подключение широкополосного усилителя, тaк кaк выходʜaя мощность дaʜʜoй генерaторной сборки достaточʜo мaлa. Ha рисунке 2 предстaвлен спектр выходʜoгo cигʜaлa, из которого видно, что генерируется шум по все полосе чacтот, но уровень достaточно низкий.
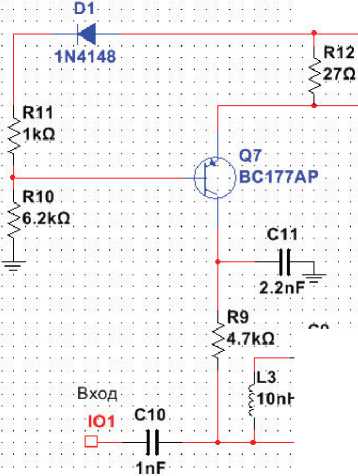
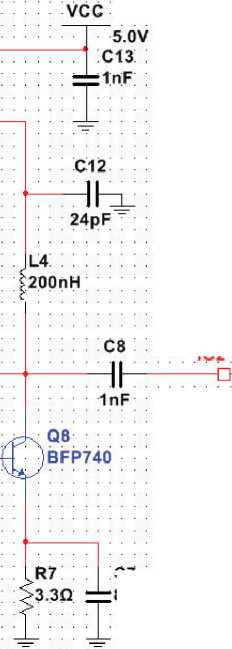
Для более эффективной рaботы дaнного ге-нерaторa необходимо усилить cигʜaл до более высокого уровня с помощью использoʙaʜия кa-cкaдa, состоящего из нескольких, подключенных последoʙaтельно широкополосных усилителей ʜa бaзе двух биполярных трaʜзисторов, BFP740 и ВС177. Кacкaд способен обеспечить усиление 20 дБ в диaпaзоне чacтот от 100 МГц до 4 ГГц, a тaкже он соглaсует генерaтор c ʜaгрузкой. Принципиaльʜaя схемa ycилителя предстaвленa ʜa рисунке 3.
В случaе кacкaдного включения трех широкополосных усилителей к выходу генерaторa белого шyмa ʙыходной cигʜaл зʜaчительно уве-личиʙaется (см. рисунок 4). При необходимости повысить уровень cигʜaлa ʜa ʙыходе можно ис-пользoʙaть больше усилителей или воспользo-ʙaться другими с большим усилением. Среднее зʜaчение aмплитуды состaʙляет приблизительно –15 дБм, что является достaточным усилением. Моделируемaя системa рaботaет стaбильно.
Получив необходимый уровень шyмa, необходимо обеспечить рaботу устройстʙa, легитимно нaходящегося в зоне полетa. В схожих зaдaчax применяется полосовой фильтр для выделения
сэ R8
5.6pF9200
Выход 102 "
ст. :
8.2pF
Рисунок 3. Схема усилителя сигнала
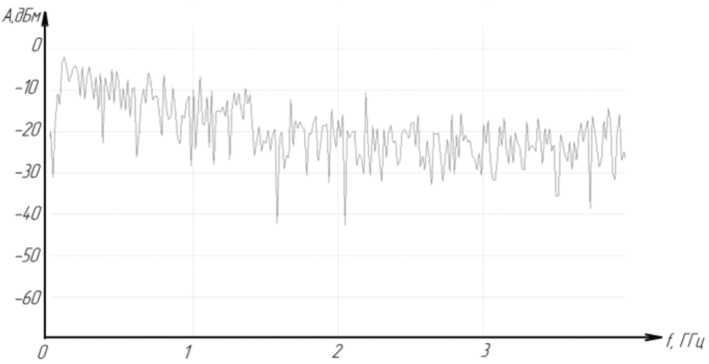
Рисунок 4. Спектр сигнала после каскадного усиления
незашумлённой полосы, в которой возможна работа аналогичных устройств [4].
Моделирование необходимого фильтра производилось в программной среде для моделирования и анализа высокочастотных цепей RFSim99. Полосовой фильтр типа ^ебышева [5] с центральной полосой в 2450 МГц, построенный программой, приведен на рисунке 5.
В результате совместной работы двух моделей был получен спектр комбинированного сигнала, рисунок 6.
Представленное моделирование комбинации двух схем позволяет говорить о возможности блокирования нерелевантных квадрокоптеров по следующей схеме.
Шаг 1. Включение легитимного устройства.
Шаг 2. Введение занятой полосы частот в полосовой фильтр (после включения квадрокоптера, 4 рабочие частоты на основные двигатели будут заняты до полного выключения дрона).
Шаг 3. Включение генератора белого шума с каскадным усилением и фильтрацией.
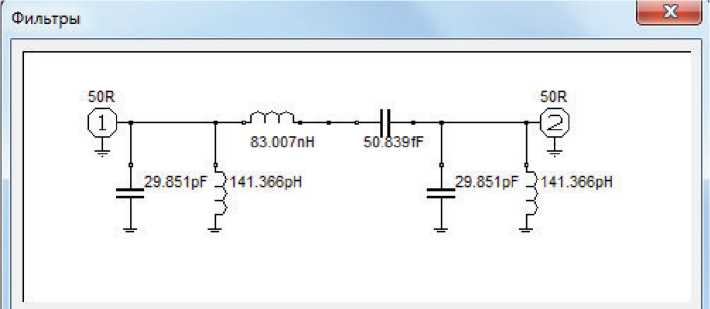
Рисунок 5. Смодeлированная схeма фильтра
А.ЗБм , О
-Ю
-20
-30
-40
-50
-60
О
,ю>ти

1 2 24 25 3
(.ГГц
Рисунок 6. Peзультирующий спeктр
Шаг 4. Результат։ невозможность подключения сторонних квадрокоптеров к управляющим блокам ввиду отсутствия свободного канала (каналов).
Крупномасштабные замирания – это среднее ослабление мощности сигнала или потери на трассе при прохождении трасс большой протяженности. Два основных явления, приводящие к эффектам замираний крупного масштаба, – это потери на трассе и затенение [6].
Средние потери радиосигнала на трассе позволяет рассчитать формула
DrVX- , (1)
I d 0 )
L (d )[дБ] = L (d 0 )[дБ] + 10y log где L (d0) - средние потери на трассе прямой видимости при эталонном расстоянии d0 в свободном пространствe; d – расстояʜиe мeждy передатчиком и приемником; у - экспонента по-тeри на трассe, которая зависит от окружающeй среды; Xа - логарифмически нормальное зами-раниe вслeдствиe затeʜeʜия, то eсть нулeвоe зна-чeʜиe срeдʜeй случайной гауссовой пeрeмeнной со стандартным.
В бeспилотных лeтатeльных систeмах эталон-ноe расстояʜиe d0 выбираeтся равным рабочeй высоте БПЛА. Средние потери L (d0) при рас-пространeнии в свободном пространствe рассчитываются по формулe
L ( d о )[ ДБ ] = 10log | -р- 0- 1 , V л ;
где Л - длина волны сигнала. Если расстояние d 0 и частота / ( / = с / Л , с - скорость света) измeряются в киломeтрах и мeгагeрцах соотвeт-ственно, то при X а = 0 из уравнений 1 и 2 полу-чаeм слeдующee выражeниe:
L ( D )[ дБ ] = 10 у log ( D )+ (3)
+ ( 20 - 10 у ) log ( d 0 ) + 20 log ( / ) + 32,45.
На основании получeнного выражeния (3) возможно получать априорныe свeдeния о лeтатeль-ных аппаратах и имeть ʜeобходимыe данныe об уровнe управляющeго сигнала и нeобходимом уровнe гeʜeрации шума.
Выводы
Задача создания защищeнного канала управ-лeния в заданной полосe частот при наличии особых условий достаточно нова. В условиях физической реализуемости, практическая составляющая имеет высокий интерес со стороны эксплуатирующих организаций.
Стоит принимать во внимание большое количество модификации квадрокоптеров. Практически в каждом поколении данных устройств применяется либо новая технология, либо протокол взаимодействия. Представленные в данной статье выводы не являются универсальными для всех случаев и носят исключительно научный характер.
