Применение ГИС-технологий для моделирования пищевого поведения крупных млекопитающих

Автор: Мидоренко Дмитрий Альбертович, Курганов Александр Вячеславович
Журнал: Вестник Тверского государственного университета. Серия: Биология и экология @bio-tversu
Рубрика: Зоология
Статья в выпуске: 12, 2009 года.
Бесплатный доступ
В статье представлена методика моделирования пищевого поведения крупных млекопитающих (на примере бурых медведей) на основе данных дистанционного зондирования и GPS-навигации с использованием ГИС-технологий и сетевого анализа.
Географические информационные системы, гис-технологии, бурый медведь, пищевое поведение, сетевой анализ, данные дистанционного зондирования, gps-тропление, системы глобального позиционирования, "чистый лес", коэффициент полезного действия
Короткий адрес: https://sciup.org/146116224
IDR: 146116224 | УДК: 599+57.088:591.51
Application of GIS-technologies for the simulation of the food behavior of large mammals
In the article is represented the procedure of the simulation of the food behavior of large mammals (based on the example of brown bears) on the basis of data of remote sensing and GPS-navigation with the use of GIS-technologies and net analysis.
Текст научной статьи Применение ГИС-технологий для моделирования пищевого поведения крупных млекопитающих
Усиление информатизации и технологизации биологических и экологических исследований, использование информационного подхода, позволяет не только количественно описать процессы, происходящие в сложных эко- и геосистемах, но и смоделировать их [3].
Внедрение новых информационных технологий в биологические исследования предполагает использование методов обработки данных и анализа результатов средствами географических информационных систем (ГИС), систем глобального (спутникового) позиционирования и данных дистанционного зондирования (ДДЗ).
Геоинформационные технологии в области учёта и охраны крупных млекопитающих дают возможность значительно ускорить и упростить обработку исходного учётного материала, анализировать и представлять результаты анализа в форме, удобной для их пространственной локализации.
Использование данных дистанционного зондирования и систем глобального позиционирования в биологических исследованиях существенно расширяет возможности оперативного сбора информации и систематизации полученных данных.
Одна из распространённых сфер применения ГИС – сбор и управление данными по охраняемым территориям , таким, как заказники и национальные парки. В пределах охраняемых районов можно проводить полноценный мониторинг растительных сообществ и редких видов животных, определять влияние антропогенных вмешательств, планировать и доводить до реализации природоохранные мероприятия [2].
Авторами предпринята попытка определить возможные пути передвижения крупных млекопитающих по территории Торопецкого муниципального биологического заказника «Чистый Лес», расположенного в Торопецком р-не Тверской обл.
Цель исследования – моделирование пищевого поведения бурых медведей с использованием данных дистанционного зондирования и методов сетевого анализа.
В качестве объекта исследования был выбран бурый медведь ( Ursus Arctus ) - высокоорганизованный хищник генерализованного типа с достаточно ярко выраженным интеллектом, высоким уровнем развития ориентировочно-исследовательской реакции и рассудочной деятельности [3].
Стереотипы в пищевом поведении бурого медведя имеют идентичные поведенческие акты, наблюдаемые у различных особей. Это указывает на участие врожденных компонентов поведения в формировании пищевых поведенческих стереотипов по от- ношению к отдельным пищевым объектам. Пищевые стереотипы благотворно влияют на общий уровень возбуждения организма, что, в свою очередь, способствует снижению затрат энергии на пищедобывательную деятельность [4].
Из-за возрастающей трофейной ценности медвежьих шкур и ведения активной охоты численность бурых медведей неуклонно сокращается. В этой связи весьма актуальными являются изучение и охрана вида, решение проблемы незаконной охоты, выявление наиболее благоприятных условий обитания бурых медведей и возможных причин их миграций.
В ходе исследования решались следующие задачи: 1) анализ пищевых предпочтений бурых медведей; 2) классификация космического снимка и интерпретация тематического классифицированного изображения; 3) формирование сети на основе интерпретированного тематического изображения; 4) расчёт весовых коэффициентов прохождения по сети; 5) моделирование маршрутов передвижения бурого медведя.
В результате оценки функциональных особенностей программных средств для обработки данных GPS-навигации, материалов космической съёмки и формирования сетевой модели предпочтение было отдано настольной геоинформационной системе ArcView GIS с модулями приложения Image Analyst и Network Analyst, значительно расширяющими возможности базового продукта.
В качестве исходных данных были использованы литературные [3; 4] и картографические источники (общегеографические и топографические карты, карта растительности), а также материалы GPS-трапления бурого медведя, проведённого сотрудниками заказника «Чистый Лес» в период с 11 апреля 2005 г. по 15 января 2006 г.
Материалы GPS-тропления были представлены в виде набора путевых точек, фиксация которых автоматически производилась GPS-ошейником, носимым годовалой медведицей, каждые два часа. Таким образом, данные представляли собой ежесуточное местоположение медведя в течение девяти месяцев одного года.
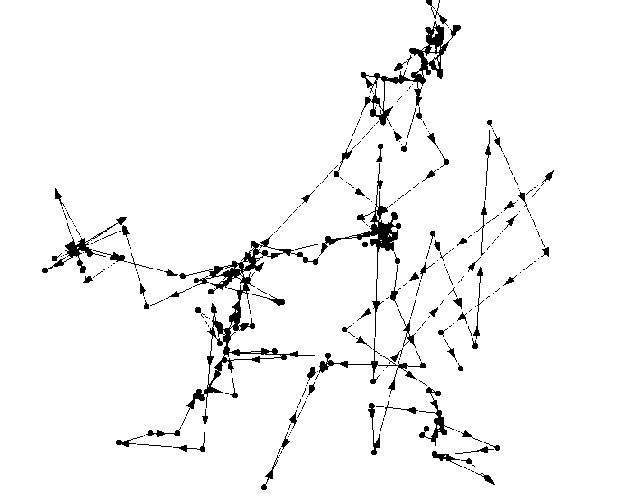
Рис. 1. Пример месячного маршрута перемещения бурого медведя, полученный в результате GPS-тропления
Данные в виде путевых точек, полученные с GPS-ошейника, были конвертированы в ГИС ArcView GIS, совмещены с топографической картой масштаба 1:100 000 территории заказника «Чистый Лес», отсортированы по их принадлежности к календарному месяцу и последовательно соединены между собой (рис. 1).
Анализ и обработка всех имеющихся данных – GPS-тропления, литературных и картографических – позволили свести воедино результаты, характеризующие питание и передвижение бурого медведя по сезонным циклам (см. таблицу).
Таблица
Динамика кормовой базы и экологическая специфика маршрутов бурого медведя по сезонам
Космический снимок ИСЗ Landsat®

Маршруты передвижения бурых медведей
//
ArcView GIS
^ =
Сравнительный
Результаты GPS-тропления бурого медведя
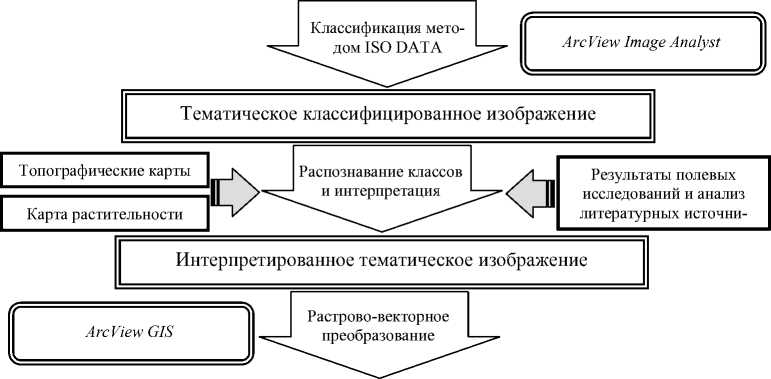
Рис. 2. Технология моделирования пищевого поведения бурого медведя
Через официальный Интернет-каталог [5] был получен космический спектрозональный снимок с пространственным разрешением 30 м спутниковой системы Landsat® на северо-западную часть Тверской обл.
В ходе исследования была разработана общая технологическая схема (рис. 2) моделирования пищевого поведения бурого медведя с использованием данных GPS, ДДЗ и методов сетевого анализа
Классификация цифрового изображения была выполнена при помощи ГИС ArcView GIS и встроенного модульного расширения Image Analyst, в котором реализован метод ISO DATA (Итеративный самоорганизующийся анализ данных).
Распознавание классов производилось с использованием данных GPS-тропления, топографических карт и тематической карты растительности.
Были выделены следующие основные классы: 1) лес, 2) болото, 3) вырубки, 4) пашни, 5) дорожная сеть, 6) населённые пункты, 7) водотоки, 8) водоёмы.
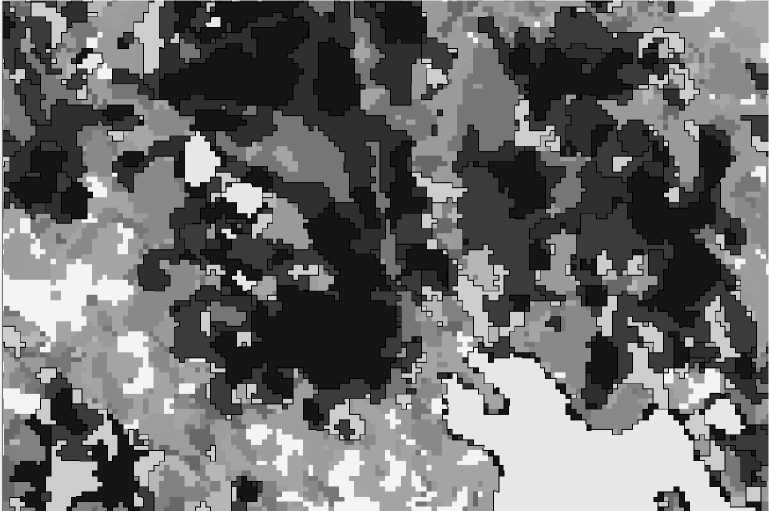
Рис. 3. Фрагмент оцифрованного тематического изображения, построенного на основе космического спектрозонального снимка Landsat® методом ISO DATA
Растрово-векторное преобразование (оцифровка) классов (рис. 3) и выборка по классам позволила в дальнейшем организовать сеть и рассчитать коэффициенты участков прохождения сети для моделирования пищевого поведения бурого медведя.
При формировании сети длина её ребра была определена в 30 м. Этот параметр позволил использовать в качестве тематической подложки для получения данных о территории космический снимок с пространственным разрешением, имеющим ту же величину.
Таким образом, проанализированная спектральная характеристика пиксела цифрового изображения дала описательную информацию для каждого отдельно взятого ребра сети.
Пищевое поведение рассматривалось через формулу физической величины КПД (коэффициент полезного действия):
H = W пол /W затр , (1) где W пол – используемая энергия, получаемая на «выходе» системы; W затр – не вся энергия, поступающая в систему, а лишь та её часть, для получения которой производятся реальные затраты.
Коэффициент полезного действия - характеристика эффективности системы в отношении преобразования или передачи энергии; определяется отношением полезно использованной энергии к суммарному количеству энергии, полученному системой. Он показывает, какая часть подводимой энергии полезно используется в рассматриваемом устройстве [1].
Данные, полученные в результате картографической обработки, полевых исследований и изучения литературы, были увязаны со сформированной сетевой моделью. Это позволило оформить на основе формулы (1) следующую формулу участков прохождения сети:
к=
О П
Д П ⋅ Р Ф
где, О П - обилие пищи; Д П - доступность пищи; Р Ф - раздражающий фактор.
Проводя аналогию с формулой (1), можно установить параллели между Wпол = ОП (сумма возможной потребляемой энергии) и W^ . = ДП • Р Ф (затраты энергии на поиск пищи и фактор, увеличивающий затраты энергии).
Каждый из коэффициентов рассчитывался по следующей схеме:
ОП - обилие пищи, т.е. разновидность пищи на данной территории (например, если на участке встречается брусника, клюква и пушица, в этом случае ОП = 3).
Д П - доступность пищи. Коэффициент, учитывающий проходимость территории, где находится эта пища. Была выбрана десятибалльная шкала, и каждому участку сети присвоено своё значение в этих пределах с учётом условной труднопроходимости территории.
Р ф - раздражающий фактор - степень человеческой активности. В данном случае учитывался антропогенный фактор - наличие дорог, населённых пунктов, учитывалась отдалённость рёбер от населённых пунктов, дорог. Так же как и в случае с ДП, Р ф , присваивались значения от 1 до 10.
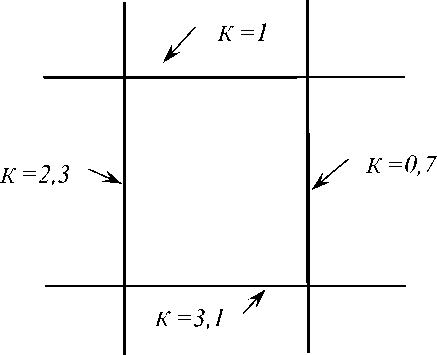
Рис. 4. Пример присвоения весовых коэффициентов ребрам сети
Но при этом не учитывались зависимости хищника от водопоя и наличие других хищников, а также воздействие посторонних факторов, например шума.
Рассчитанные по формуле (2) весовые коэффициенты были записаны в каждый отдельно взятый фрагмент (ребро) сети (рис. 4).
Формирование маршрутов передвижения основывалось на поиске оптимального маршрута и опиралось на «Задачу коммивояжёра» – задачу пространственного анализа отыскания пути наименьшей длины между двумя заданными вершинами сети.
Для построения в ГИС ArcView GIS с использованием модуля расширения Network Analyst выбирались рассчитанные весовые коэффициенты прохождения, а на карте указывались точки «входа» и «выхода» – начальный и конечный пункты маршрута. Сам маршрут формировался автоматически. Всего было смоделировано 47 маршрутов, каждый из которых представлял полилинию, сегменты которой совпадали с рёбрами сети.
Смоделированные оптимальные маршруты передвижения бурого медведя сравнивались с реальными маршрутами хищника, полученными GPS-троплением.
Сравнительный анализ маршрутов показал, что методика и компьютерная технология формирования маршрутов передвижения требуют более детальной проработки. В частности, необходимо учитывать зависимость животных от водопоя, хищничество и воздействие посторонних факторов. Кроме того, ярко выраженная сезонность питания бурых медведей предполагает учёт сезонных и возрастных изменений.
В результате исследований были проанализированы разносторонние источники и охарактеризовано питание и предпочтения в передвижении бурого медведя по сезонам одного года.
В ходе проведённых экспериментальных работ на основе спектрозонального космического снимка создано оцифрованное тематическое изображение, и сформирована совмещённая с ним геометрическая сеть.
Формула (2) на базе КПД, использованная при расчёте весовых коэффициентов, позволила оформить сетевую модель, и дать качественную оценку сбалансированного и избирательного подхода медведя к процессу поиска и выбора пищи. Однако, внедрение более сложных математических алгоритмов, например алгоритмов нейросетевого анализа, позволило бы более точно рассчитывать коэффициенты прохождения.
Таким образом, смоделированные уникальные маршруты передвижения выявили предпочтения в путях передвижения и кормовой базе и в конечном итоге охарактеризовали пищевое поведение бурого медведя.
Использование полученных результатов может повысить эффективность решения задачи сохранения вида. После доработки предлагаемая методика может стать дополнением к уже имеющимся на сегодня традиционным методам учёта и контроля крупных млекопитающих, таким, как зимний маршрутный учёт (ЗМУ), радиослежение и GPS-тропление.
Tver State University
In the article is represented the procedure of the simulation of the food behavior of large mammals (based on the example of brown bears) on the basis of data of remote sensing and GPS-navigation with the use of GIS-technologies and net analysis.
