Применение индуктивных датчиков абсолютного давления в качестве чувствительных преобразователей для волномерных буев

Автор: Грязин Д.Г., Ткалич В.Л.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 1 т.10, 2000 года.
Бесплатный доступ
Приводится обоснование целесообразности применения в волномерных буях индуктивных датчиков абсолютного давления. Указывается, что режим функционирования датчиков в этом приборе характеризуется рядом особенностей, что обусловило применение ранее в волнографах этого типа дифференциальных датчиков давления. С целью увеличения надежности волномерного буя, предлагается применять в качестве чувствительного преобразователя индуктивные датчики абсолютного давления. Предлагаются результаты исследований статических и динамических характеристик датчиков этого типа.
Короткий адрес: https://sciup.org/14264117
IDR: 14264117 | УДК: 531.787:627.338
Using inductive sensors of absolute pressure as sensitive converters for wavemetering buoys
Using inductive absolute pressure sensors in wavemetering buoys is motivated. It is indicated that the operation of sensors in this instrument is characterized by some peculiarities, which has determined the earlier choice of differential pressure sensors. To increase the reliability of wavemetering buoys, it is suggested using inductive sensors of absolute pressure as a sensitive converter. The results of studying static and dynamic characteristics of this type sensors are given.
Текст научной статьи Применение индуктивных датчиков абсолютного давления в качестве чувствительных преобразователей для волномерных буев
Одним из широко распространенных приборов для измерения параметров морского волнения является волномерный буй (ВБ) с гидростатическим датчиком давления. Этот прибор состоит из плавающего на поверхности волны буя, к которому на кабель-тросе длиной 30–50 м прикреплена гондола с датчиком давления. Датчик измеряет гидростатическое давление, величина которого пропорциональна измеряемой высоте волны.
Режим функционирования датчиков давления в ВБ характеризуется рядом особенностей. Так, диапазон частот измеряемого процесса лежит ниже 1 Гц. Отличительной чертой работы датчика является необходимость выделения сравнительно малого полезного сигнала (0,01–1 кгс/см2) на фоне значительной статической составляющей (3– 6 кгс/см2). Решение этой задачи может производиться либо путем компенсации статического давления в случае применения дифференциального датчика, либо путем компенсации электрического сигнала, пропорционального этому давлению, при использовании датчика абсолютного давления. В последнем случае измерительный преобразователь должен иметь высокую чувствительность. Использование дифференциального датчика давления производилось в широко известном серийно выпускавшемся ВБ типа ГМ-16 [1]. В этом приборе в дифференциальной полости датчика с помощью воздуха создавалось избыточное давление, соответствующее глубине его установки, за вычетом 10 м. Изменение давления воздуха в результате воздействия температуры не учитывалось. Это приводило к уходу нулевой линии от среднего положения на ленте самописца при записях волно-грамм. Кроме того, компенсатор включал в себя резиновый элемент, который с течением времени выходил из строя. После снятия этих приборов с производства и из-за отсутствия запасных частей эта причина приводила к списанию приборов. Известны конструкции волнографов, в которых на дифференциальный вход датчика устанавливался клапан с сильфонным чувствительным элементом, блокировавшим его под воздействием заданного давления. Разблокирование же клапана производилось только после поднятия буя на борт судна. В этом случае мембрана подвергалась значительным нештатным нагрузкам, что сказывалось на ресурсе ее работы.
Таким образом, по разным причинам как в серийных, так и в нестандартизованных средствах измерения волнения ранее не применялись датчики абсолютного давления индуктивного типа. Представляется, что использование датчиков этого типа в волномерных буях имеет ряд преимуществ перед другими. Они не требуют дополнительного клапана, имеют высокую чувствительность и линейность характеристики. Мембраны индуктивных датчиков, выпускаемых авиационной промышленностью рассчитаны для работы в агрессивных средах и т.д. Однако вопрос о применении этих датчиков мог бы быть решен только после исследования их метрологических характеристик
ИССЛЕДОВАНИЕ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ДАТЧИКОВ
С целью определения метрологических характеристик индуктивных датчиков абсолютного давления в режимах их функционирования в волномерных буях были проведены исследования датчиков типа ИДТ-8 и ИКД6Тда5.
Индуктивный датчик ИДТ-8 предназначен для измерения избыточного давления в жидких и газообразных средах при нормальной и повышенной температуре. Питание датчика осуществляется напряжением 40 В 500 Гц.
40В 500Г
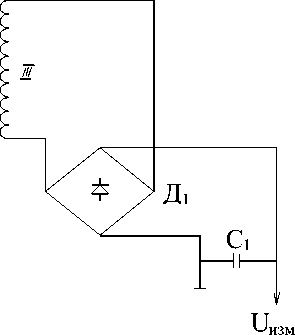
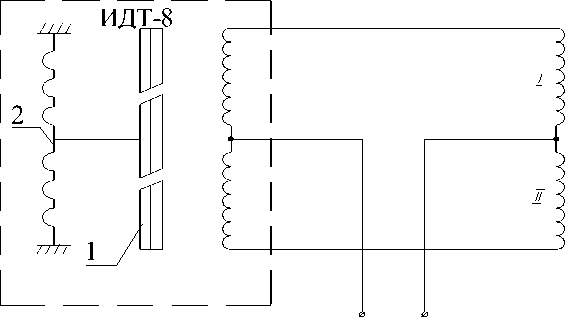
Рис. 1. Схема включения датчика ИДТ-8. 1 — трехсекционный сердечник; 2 — мембрана; I, II, III — обмотки согласующего трансформатора

| датчик
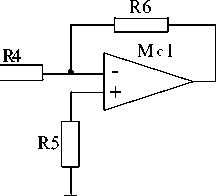
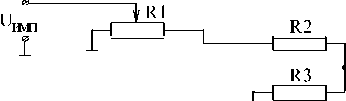
Рис. 2. Схема проведения измерений характеристик датчиков
Схема его включения представлена на рис. 1. Обмотки датчика подключены к согласующему трансформатору по мостовой измерительной схеме, в диагональ которой подается напряжение питания. Согласующие обмотки 1 и 2 трансформатора рассчитаны таким образом, что при отсутствии д рд ,р мотке 3 равно нулю. Индуктивный узел датчика состоит из трехсекционного сердечника, на крайних секциях которого установлены катушки, а центральная связана штоком с мембраной 2. При изгибе мембраны под действием давления, между центральной частью сердечника и крайними его частями изменяется магнитный зазор, что приво- дит к изменению величины магнитного потока в сердечнике и разбалансу моста. Таким образом, на выходной обмотке 3 согласующего трансформатора появляется напряжение, пропорциональное измеряемому давлению.
Аналогичным образом работает и датчик д.
струкции является лишь то, что питание датчика производится напряжением 6 В, а преобразователь переменного тока и выпрямитель расположены внутри корпуса датчика.
Для измерения статических и динамических характеристик в режимах функционирования датчиков они были подключены к устройству ком-
U, в
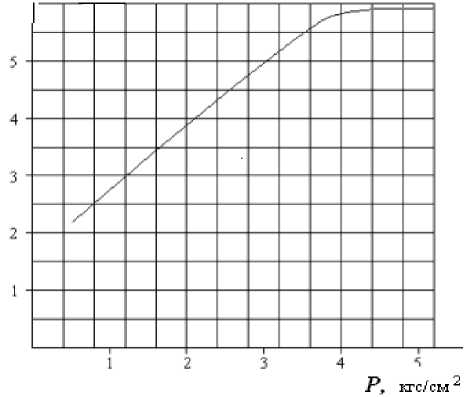
Рис. 3 . Градуировочная характеристика датчика ИКД6Тда5
4 кгс/см2. С целью определения температурного дрейфа, измерения производились при нормальной +20 С и пониженной +2 С температурах датчика. Указанные значения температур соответствуют предельным, встречающимся на глубинах 30–60 м в любое время года на всех акваториях предполагаемых измерений. Температура датчика достигалась путем его выдерживания в течение двух часов при этой температуре перед проведением измерений. Измерения производились после предварительной компенсации фонового давления с помощью компенсирующего устройства до величины остаточного нулевого напряжения менее 0,001 В. Измерения сигнала датчика производились на диапазоне 50 В с разрядностью три знака после запятой. Для более точного определения значений погрешности датчиков задание каждого значения давлений и регистрация соответствующих напряжений производились по пять раз.
Для определения нелинейности градуировочной характеристики был произведен р ас чет среднего градуировочного коэффициента KГРi , полученного при каждом значении давления P i внутри диапазона по формуле:
пенсации постоянной составляющей сигнала и усилителю (рис. 2). Представленное на рисунке устройство позволяет суммировать постоянный уровень сигнала от датчика с напряжением, соответствующим статическому давлению и имеющим обратную полярность. Выделенный таким образом полезный сигнал усиливался с помощью усилителя и подавался на регистратор.
На первом этапе исследований была определена статическая градуировочная характеристика датчиков при отключенном устройстве компенсации. Для проведения эксперимента датчики подсоединялись к грузопоршневому манометру типа МП-6 с классом точности задания давлений 0,05. При этом передача давления масла от манометра к датчику производилась с помощью трубопровода, длиной 4 м. В качестве регистратора использовался цифровой вольтметр типа Щ1526 с классом точности 1,5. Особенностью использования грузопоршневого манометра является то, что задание давления на нем производится с помощью образцовых грузов с наименьшим шагом 0,1 кгс/см2. Результаты эксперимента показали, что величина градуировочного коэффициента в диапазоне давлений от 3 до 5 кгс/см2 существенно не различается. Указанный диапазон давлений соответствует глубине постановки датчика от 30 до 50 м. В качестве примера на рис. 3 показана градуировочная характеристика датчика ИКД6Тда5.
На втором этапе были исследованы статические градуировочные характеристики датчиков в диапазоне ±0,5 кгс/см2 (что соответствует измерению волны высотой 10 м) при статическом давлении 3 и n
Z K rpi ( Pi )
_ i =1 _____________ K rPi = ,
n где n — число серий измерений (в данном случае пять).
Результаты расчетов показали, что значения KГРi для датчика ИКД6Тда5 с увеличением давления уменьшаются: так, при статическом давлении P СТ = 3 кгс/см2 и P i = - 0,5 кгс/см2 значение K ГРi =1,6595, а при P i = 0,5 кгс/см2 K ГРi =1,4515. Значения KГРi для датчика ИДТ не имеют систематического изменения при уменьшении или увеличении давления.
Средний градуировочный коэффициент для обоих датчиков рассчитывался по формуле
K ГР
m
Z KrPi i=1
m где m — общее число измерений (в данном случае 50).
Оценка случайной составляющей погрешности градуировочного коэффициента выполнялась по формуле
A i = к Г р K r pi .
Значение среднего квадратического отклонения (СКО) погрешности определялось из выражения
|
При стат. давлении 3 кгс/см2 |
ИДТ-8 |
ИКД6Тда5 |
||
|
δ KГРt |
δ K СЛ |
δ KГРt |
δ K СЛ |
|
|
± 0,91 % |
± 2,9 % |
± 0,25 % |
± 0,2 % |
|
|
При стат. давлении 4 кгс/см2 |
± 0,65 % |
± 2,8 % |
± 0,18 % |
± 0,13 % |
m
∑ ∆ 2 i
σ=
i = 1
m
- 1
После исключения из результатов расчета K ГРi выбросов была проведена проверка нормальности закона распределения по критерию χ 2, что подтвердило предположение о нормальности закона распределения величин погрешностей.
Для оценки систематической составляющей температурной погрешности определялся средний градуировочный коэффициент от значений, полученных при предельных температурах
K ГР =
K ГР 20 o С + K ГР 2 o С
Относительная погрешность градуировочного коэффициента, обусловленная температурными изменениями, рассчитывалась из выражения
±δKГРt= ∆K 100%, KГР где ∆K = I KГР - KГРt I . Здесь KГРt соответствует K ГР2o С или K ГР20oС .
Для расчета случайной составляющей погрешности K СЛ был определен толерантный интервал. Значения погрешностей датчиков, рассчитанные с учетом температурных изменений градуировочной характеристики, представлены в таблице.
Из сравнения значений погрешностей датчиков ИДТ-8 и ИКД6Тда5 следует, что более точным является второй датчик, однако он имеет нелинейную градуировочную характеристику в необходи-
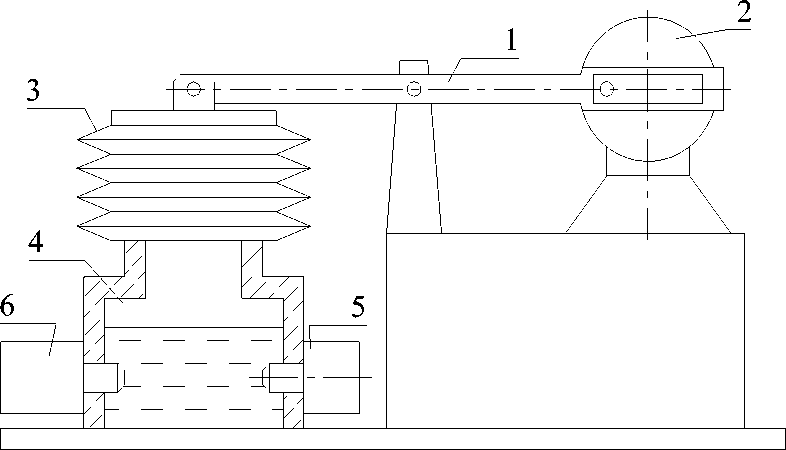
Рис. 4. Схема стенда для определения динамических характеристик датчиков давления.
1 — кривошипно-шатунный механизм, 2 — маховик, 3 — сильфон, 4 — рабочая камера, 5 — образцовый датчик, 6 — исследуемый датчик
мом диапазоне давлений. Необходимо отметить, что, кроме измерения статических характеристик датчиков, был произведен эксперимент по определению порога их чувствительности. Для этого после установки датчиков на грузопоршневой манометр и нагружения их статическим давлением производилось дополнительное увеличение давления с помощью разновесов четвертого класса точности. Значение порога чувствительности определялось с помощью приращения давления, соответствующего дополнительной массе, при установке которой на грузопоршневой манометр изменялась цифра в последнем разряде цифрового вольтметра, подсоединенного к выходу датчиков по схеме рис. 3. Величина порога чувствительности для обоих датчиков, измеренная таким образом, составила 0,2 г/см2, что соответствует изменению высоты водяного столба на 2 см.
Определение динамических характеристик датчиков производилось с помощью специального стенда, схема которого представлена на рис. 4. Кривошипно-шатунный механизм 1 преобразует вращение маховика 2 в возвратно-поступательные движения сильфона 3. Вращение маховика производится с помощью двигателя с редуктором. Сильфон создает избыточное давление в камере 4, залитой до половины жидкостью. В эту камеру ниже уровня поверхности жидкости выведены штуцеры образцового и испытуемого датчиков. Указанный стенд позволяет производить колебания давления в диапазоне от 0 до 0,1 кгс/см2 с частотой до двух герц.
При проведении эксперимента в качестве жидкости использовалась морская вода. Для регистрации задаваемого давления был применен датчик давления прибора ВИ-6, работающий в диапазоне от 0,01 до 0,5 кгс/см2 с основной погрешностью, согласно паспорту, 3 %. Ко второму штуцеру камеры 4 подсоединялись испытываемые датчики.
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
Результаты проведенных исследований динамических характеристик показали, что АЧХ обоих чувствительных преобразователей в диапазоне до двух герц линейны.
Необходимо отметить, что в реальных условиях эксплуатации датчики будут работать в диапазоне давлений 3,5–4,5 кгс/см2, а экспериментальные исследования динамических характеристик производились в связи с возможностями стенда лишь в диапазоне от 0 до 0,1 кгс/см2. Несмотря на это, можно сделать вывод о том, что АЧХ датчиков в рабочем диапазоне давлений при частотах от 0 до 2 Гц будет линейной. Это утверждение основано на том, что собственная частота колебаний мембран датчиков, как и собственная частота струны, при их статическом нагружении будет увеличиваться, что не приведет к возникновению нелинейности АЧХ в области низких частот.
На основании результатов проведенных исследований статических и динамических характеристик индуктивных датчиков абсолютного давления можно сделать вывод о том, что эти датчики могут быть использованы в качестве чувствительных преобразователей давления волномерных буев. В случае проектирования буя с бортовым микропроцессорным устройством целесообразно использовать датчик ИКД6Тда5, а в случае разработки прибора, использующего самописец для записи волнограмм, — датчик ИДТ-8.
Список литературы Применение индуктивных датчиков абсолютного давления в качестве чувствительных преобразователей для волномерных буев
- Глуховский Б.Х. Исследование морского ветрового волнения. Л.: Гидрометеоиздат, 1966. 284 с.
