Применение инерциальной навигации для определения буксования сельскохозяйственных тракторов

Автор: Федоренко Вячеслав Филиппович, Мишуров Николай Петрович, Трубицын Николай Владимирович, Таркивский Виталий Евгеньевич
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Процессы и машины агроинженерных систем
Статья в выпуске: 1, 2018 года.
Бесплатный доступ
Введение. В статье обоснована необходимость определения буксования колес сельскохозяйственного трактора при проведении его испытаний. Рассмотрены принцип работы и конструкция применяемых датчиков определения буксования ведущих колес (движителей) при испытаниях тракторов и сельскохозяйственных машин, отмечены конструктивные особенности и характеристики распространенных датчиков буксования на основе вращающегося диска с прорезями через фиксированный угол. Проанализированы достоинства и выделены ключевые недостатки существующих датчиков: сложность монтажа, необходимость изготовления деталей крепления датчика под конкретную модель трактора. Целью исследования является разработка универсального датчика буксования, который легко монтируется и может использоваться при проведении испытаний колесных и гусеничных тракторов. Материалы и методы. Предложено решение, определяющее положение ведущего колеса в трехмерном пространстве на основе инерциальной навигационной системы. Описаны принципы работы компонентов данной системы: акселерометра, гироскопа и магнетометра. Проанализированы основные применяемые математические цифровые фильтры ориентации для обработки «сырых» данных. Результаты исследования. Разработана конструкция устройства определения буксования трактора, основным элементом которого является инерциальный датчик положения колеса. Обоснован выбор основных компонентов датчика: марка и модель инерциальной навигационной системы, цифровой фильтр ориентации и микроконтроллер для функционирования датчика. В результате исследований был сконструирован и изготовлен датчик положения ведущего колеса на базе инерциальной навигационной системы MPU-9250 и микроконтроллера STM32F405. Разработано программное обеспечение датчика на языке C. Для обработки данных в реальном времени реализован цифровой фильтр на основе алгоритма Мэджвика. Обсуждение и заключения. Датчик буксования колес трактора на основе инерциальной навигационной системы лишен основных недостатков широко распространенных датчиков ведущих колес. К преимуществам датчика относятся простота монтажа, беспроводной способ передачи данных.
Буксование, испытания, инерциальная навигация, инерциальная навигационная система, фильтр мэджвика, кватернион
Короткий адрес: https://sciup.org/14720286
IDR: 14720286 | УДК: 631.3:004 | DOI: 10.15507/0236-2910.028.201801.008-023
Application of inertial navigation for determining the slippage of agricultural tractors
Introduction. The article substantiates the necessity of determining the slippage of the tractor wheels during testing. The principle of operation and design of the sensors used to determine the slippage of the driving wheel in the testing of tractors and agricultural machines are considered; design features and characteristics of common shunting sensors based on a rotating disk with slots through a fixed angle are noted. The authors analized advantages and key disadvantages of existing sensors, such as the complexity of mounting and the need to manufacture the sensor mounting parts for a specific tractor model. The aim of the study is to develop a universal slip sensor for testing wheel and tracked tractors. Materials and Methods. The proposed solution determines the positions of the driving wheel in three-dimensional space on the basis of the inertial navigation system. The principles of operation of inertial navigation system components are described. The system consist of an accelerometer, a gyroscope and a magnetometer. The basic mathematical digital orientation filters applied for processing raw data are analyzed. Results. The design of the tractor slip determination device is developed. The main element of the mechanism is an inertial wheel position sensor. The selection of the main components of the sensor is substantiated: name and model of the inertial navigation system, the digital orientation filter and the microcontroller for the functioning the sensor. As a result of the research, the position sensor of the driving wheel was designed and manufactured on the basis of the MPU-9250 inertial navigation system and the STM32F405 microcontroller. The sensor software was developed in C language. A digital filter was based on the Madgwick algorithm for real-time data processing. Discussion and Conclusions. The result of the research was the development of a sensor for slipping the tractor wheels based on an inertial navigation system. This type of sensor is devoid of the main disadvantages of the widely used sensors of driving wheels. The advantages of the sensor are easy installation and method of wireless data transfer.
Текст научной статьи Применение инерциальной навигации для определения буксования сельскохозяйственных тракторов
Буксование движителей трактора или самоходной машины возникает в следующих случаях: при трогании с места; при движении по поверхно-Processes and machines of agroengineering systems сти, имеющей низкие сцепные свойства (влажный грунт, пахота, дорога во время или после дождя, гололед, снег); при загрузке энергосредства (выполнении работ) и т. д. Данный процесс приводит к повышенному износу шин или гусениц, потере управляемости, перерасходу топлива и повреждению структуры почвы.
При проведении тяговых испытаний тракторов и энергетической оценки сельскохозяйственных машин одним из определяемых показателей также является текущая величина буксования движителей [1]. В соответствии с требованием стандарта ГОСТ 30745-20011, максимальное тяговое усилие, развиваемое на крюке трактора, должно ограничиваться началом неустойчивой работы двигателя, или буксованием. Предельное значение буксования не должно превышать на треках 7 % – для гусеничных тракторов, 15 % – для колесных и гусеничных с эластичной (резиновой) гусеницей; на почвенных фонах – 15 % и 30 % соответственно. Буксование движителей определяется по формуле (1):
( и, ^
5 = 1 - -0 • 100
I - 0 J
,
где no̕ , no – частота вращения ведущего колеса при движении трактора без нагрузки и с нагрузкой на крюке соответственно при одной и той же длине гона, мин-1.
Как правило, определение буксования трактора не ограничивается опре- делением буксования одного движителя, а вычисляется как среднее значение по формуле:
n
5 = 1 -У(5/), (2)
_ n ,=i где δ – среднее буксование по всем движителям; n – количество движителей; δi – буксование i-го движителя.
Установка дополнительного устройства позволяет определять величину коэффициента буксования непосредственно в процессе движения. Разработка такого устройства определения коэффициента буксования является важной задачей при испытаниях тракторов и самоходной сельскохозяйственной техники. Устройство должно определять текущую величину буксования движителей вне зависимости от их типа (колеса, гусеницы) и колесной формулы при движении трактора с различной нагрузкой.
Обзор литературы
Как правило, задачу определения коэффициента буксования движителей решают традиционным способом – установкой датчика определения угла поворота колеса трактора2–5 (рис. 1) [2–4].
Основным элементом такого датчика является диск с фрезерованными через одинаковый угол вырезами 1 . В большинстве случаев диск имеет 24
или 36 вырезов. Соответственно, точность (дискретность) датчика составляет 15° или 10°. Диск соединен гибкой муфтой со ступицей колеса и вращается вместе с ней. Корпус датчика 3 фиксируется неподвижно. Скорость вращения диска и, соответственно, движителя определяется количеством электрических импульсов за единицу времени, формируемых электронной схемой датчика при прохождении вырезов через оптическую пару 2 . Электрические импульсы от датчика передаются по проводам и фиксируются в измерительной информационной системе, где определяется их период (количество за некоторый временной интервал), а также рассчитывается угловая скорость и частота вращения ротора датчика и, соответственно, движителя.
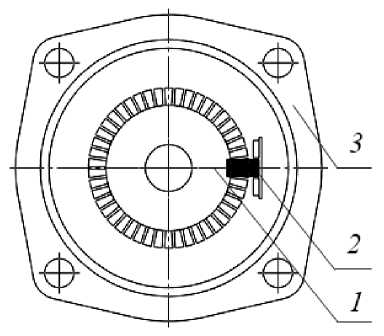
Р и с. 1. Устройство датчика буксования колес: 1 – диск с вырезами; 2 – оптическая пара;
3 – корпус датчика
F i g. 1. Wheel slip sensor design:
1 – cut-out disk; 2 – optical pair;
3 – sensor body где δ – текущее буксование всех ведущих колес, %; n – количество движителей; Kбi – калибровочный коэффициент буксования i-го движителя, полученный по формуле (1) при проезде трактора по отмеренному участку с ровным покрытием без нагрузки; Iксi – количество импульсов, полученных с датчика i-го ведущего колеса за заданный интервал времени, имп; Inc – количество импульсов, полученных с датчика пройденного пути.
В качестве датчика пройденного пути используется 5-е колесо, дополнительно установленное на тракторе.
В испытательных центрах для проведения испытаний тракторов и сельскохозяйственной техники широкое распространение получила измерительная информационная система ИП-2646. В комплект данной системы входят датчики оборотов для измерения частоты вращения ведущих колес ИП-268 (рис. 2).

Р и с. 2. Датчик оборотов ИП-268
F i g. 2. IP-268 speed sensor
При использовании датчика такого типа буксование рассчитывается по формуле:
Для установки датчика на испытываемый трактор необходимо соблюдать определенные требования:
‒ датчик должен быть закреплен так, чтобы избежать вращения его корпуса;
6 =1 - X 1 - K« i ■ If- - 100, П ( T
n
I
I kci

Р и с. 3. Монтаж датчика ИП-268 на тракторах New Holland t9.505 и Case STX-500
F i g. 3. Installation of IP-268 sensor on New Holland t9.505 and Case STX-500 tractors
‒ должна быть обеспечена гибкая связь между ступицей колеса и ротором датчика для передачи вращения колеса.
Для решения первой задачи изготавливаются штанги-фиксаторы, уста-навливливаемые на трактор и жестко фиксирующие датчики (рис. 3). Главная сложность заключается в необходимости изготовления штанги-фиксатора под каждую конкретную модель трактора. В некоторых случаях для установки штанги-фиксатора требуется также подготовить испытываемый трактор, например, просверлить отверстия для крепежа.
Для передачи вращения колеса к датчику присоединяют гибкие шланги с крепежной скобой или ниодимо-вым магнитом (рис. 4).

Р и с. 4. Датчик ИП-268 с муфтой на основе ниодимового магнита
F i g. 4. IP-268 sensor with a coupling based on niodymium magnet
Для передачи сигнала от датчика используются информационные кабе-
ли, которые должны быть аккуратно уложены на тракторе, чтобы не создавать помех обслуживающему персоналу и обеспечивать надежную связь между датчиком и измерительной информационной системой.
Анализ источников показал, что за рубежом применяются датчики буксования для сельскохозяйственной техники с конструкцией, аналогичной российской. В качестве устройства, считающего обороты движителя, применяются различные энкодеры [5] или пьезоэлектрические датчики [6–8]. Зарубежным датчикам буксования присущи те же недостатки, что и российским: необходимость неподвижного закрепления корпуса датчика, прокладка информационных кабелей.
В работе А. Винко7 предлагается конструкция экспериментального датчика для определения буксования. Он представляет собой установленный на колесо трехосевой акселерометр для фиксации изменения вектора силы тяжести и последующего расчета скорости вращения колеса. Для обработки показаний предлагается использовать расширенный фильтр Калмана. Отмечен недостаток использования акселерометра: фиксация вибрации колеса во всех плоскостях приводит к большой ошибке при вычислениях. Обработка данных после эксперимента происходит на персональном компьютере, что исключает использование такого решения в режиме реального времени.
Таким образом, проблема определения буксования трактора при испытаниях в России и за рубежом решается оборудованием трактора датчиками определения угла положения ведущих колес (движителей), что является достаточно трудоемкой задачей, требующей высокой квалификации персонала и значительной подготовительной работы.
Целью исследований является разработка универсального датчика буксования, который легко устанавливается на тракторе и не требует трудоемкой подготовки при проведении испытаний.
Материалы и методы
Существующие методы определения буксования требуют измерять частоту вращения движителя. На основании этих данных рассчитывается теоретический пройденный путь и сравнивается с фактически пройденным расстоянием за единицу времени (3). Вращение движителя можно вычислить, определив изменение его положения в пространстве путем непрерывного измерения угла относительно оси вращения (ступицы).
Решение этой задачи возможно с помощью новейшей технологии – инерциальной навигационной системы (ИНС).
ИНС предназначены для определения положения тела в пространстве и имеют преимущество в виде полной автономности: измеряемый объект не ограничен конкретной средой, расположением, направлением движения. ИНС состоит из акселерометра, гироскопа и магнитного компаса (магнетометра), позволяющих отслеживать вращательные и поступательные движения. Для определения координат в трехмерном пространстве оси датчиков расположены взаимно перпендикулярно. Современные устройства ИНС также включают в себя трехосный магнитометр, определяющий положение измеряемого объекта в горизонтальной плоскости (относительно поверхности земли), – аналог компаса. ИНС используют систему отчета, известную как «курс, тангаж, крен» (AHRS – Attitude and Heading Reference Systems), и в состоянии обеспечить полное измерение ориентации относительно силы тяжести и земного магнитного поля (рис. 5).
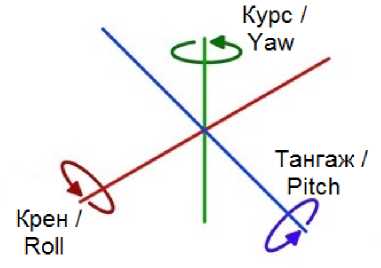
Р и с. 5. Углы, описывающие изменение положения тела в пространстве
F i g. 5. The angles describing the change in the position of the body in space
Акселерометр измеряет ускорение, действующее на датчик, и таким образом получает проекцию тела относительно земли – отклонение (вращение) по оси X и отклонение (вращение) по оси Y . Заметим, что вращение по оси Z по данным акселерометра получить невозможно.
Вращение по любой из осей координат можно определить с помощью гироскопа. Этот датчик измеряет угловую скорость, т. е. скорость поворота вокруг оси. При этом показания сильно зависят от обработки получаемых данных: чем больше скорость опроса, тем больше точность результатов. Каждый опрос датчика дает мгновенные значения угловой скорости, однако между опросами данная скорость может быть неравномерной. Кроме этого, необходимо знать точное время между опросами датчика для интегрирования данных по углу поворота.
Для фиксации вращения по оси Z подходит магнитометр – датчик, измеряющий магнитное поле. Известно, что земля имеет свое магнитное поле, и магнитометр в роли компаса способен определить направление на север.
Благодаря современному уровню развития технологий изготовления микросхем все три датчика компонуются в одном миниатюрном устройстве, которое получило название микроэлек-
Том 28, № 1. 2018
тромеханическое устройство (MEMS), что позволяет использовать ИНС в самых различных областях.
В датчиках, измеряющих пространственное перемещение, используются подвижные массы в качестве чувствительных элементов. Под действием сил инерции, возникающих при изменении параметров движения объекта, такая масса перемещается на определенную величину, которая измеряется и преобразуется в электронный вид. MEMS-акселерометры устроены таким образом, что отделить друг от друга составные части (грузик, подвес, корпус и обкладки конденсатора) практически невозможно [9]. Эти устройства обычно изготавливают на кремниевой подложке с помощью технологии микрообработки. Типичные размеры микромеханических элементов лежат в диапазоне от 1 мкм до 100 мкм, тогда как размеры кристалла микросхемы – от 20 мкм до 1 мм.
Работа акселерометров, используемых в MEMS-микросхеме, основана на конденсаторном принципе. Подвижная часть системы – классический грузик на подвесах. При наличии ускорения грузик смещается относительно неподвижной части акселерометра. Обкладка конденсатора, прикрепленная к грузику, смещается относительно обкладки на неподвижной части (рис. 6). Емкость меняется, при неизменном заряде меняется напряжение – это изменение можно измерить и рассчитать смещение грузика. После этого, зная массу грузика и параметры подвеса, легко найти ускорение.
В MEMS-микросхемах реализован еще один датчик – электронный гироскоп. Принцип работы электронного гироскопа заключается в измерении силы Кориолиса, действующей на активный элемент внутри датчика.
Для реализации магнитометров используется анизотропная магнитно-резистивная технология. Принцип работы таких датчиков основан на из-
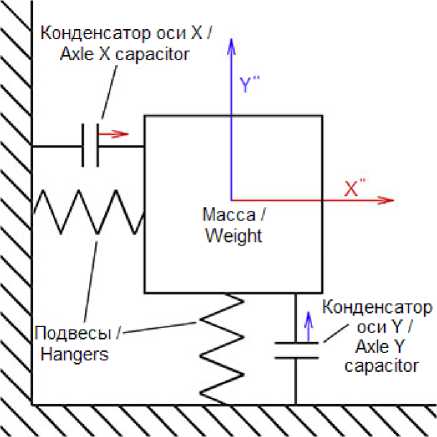
Р и с. 6. Схема электронного акселерометра
F i g. 6. The scheme of an electronic accelerometer
менении сопротивления тонкой полоски ферромагнитного материала под действием внешнего магнитного поля, перпендикулярного направлению тока, проходящего по этой полоске.
Акселерометр, гироскоп и магнетометр по отдельности не дают полного набора данных, по которым можно определить ориентацию тела в пространстве, но совместное использование данных позволяет добиться высокой точности. Для обработки данных от акселерометра, гироскопа и магнетометра применяется специализированный цифровой фильтр – фильтр ориентации. Задача данного фильтра состоит в вычислении единой оценки ориентации, полученной путем объединения и обработки данных акселерометра, гироскопа и магнитометра.
Большинство фильтров ориентации построены на использовании фильтра Калмана [10]. Данный фильтр является точным и эффективным, однако имеет ряд недостатков. Он сложен в реали- зации, поскольку линейная регрессия итерации, которая является основополагающим компонентом для процессов Калмана, а также требования к частоте дискретизации, значительно повышают требования к вычислительной мощно-сти8 [11–12]. Отношение, описывающее вращающуюся кинематику в трех измерениях, как правило, требует больше векторов состояния и реализации расширенного фильтра Калмана. Требование существенной вычислительной мощности для реализации решений Калмана является основанием для реализации альтернативных решений [13–14].
Одним из простых фильтров ориентации является комплементарный альфа-бета фильтр. Данный фильтр применяется к двум величинам, измеряемых разными датчиками, и корректирует одну из них так, что она медленно стремится ко второй. В измерительном цикле фильтр реализуется следующим образом:
A1 =
A 1 - k + A 2 k + 1
где А 1 – показания первого датчика; А 2 – показания второго датчика; k – коэффициент влияния А 2 на А 1, к » 1 .
При этом влияние величины A 2 на A 1 пропорционально разнице между ними и определяется коэффициентом k : чем больше коэффициент, тем слабее влияние.
Некоторые решения основаны на нечеткой обработке данных или на фиксации фильтра в пользу акселерометра для определения ориентации на малых угловых скоростях и интегрирования измерений гироскопа при обнаружении высоких угловых скоростей. Такой подход прост, но может быть эффективным только при ограниченных условиях эксплуатации. Многие исследователи предлагали альтернативный подход, при котором фильтр достигает оптимального синтеза данных измерений на всех угловых скоростях [15]. Тем не менее процесс требует аппроксимации методом наименьших квадратов, что также добавляет вычислительной нагрузки. Получил распространение вариант комплементарного фильтра Махони, который, как показывает практика, является эффективным и действенным решением [16]. Однако его точность подходит только для ИНС без магнитометра.
Широко используется также фильтр ориентации, разработанный С. Мэдж-виком9 [17]. Данный фильтр не так требователен к вычислительным ресурсам и обеспечивает высокую точность на низких частотах опросов акселерометра, гироскопа и магнетометра. В основу реализации фильтра положен алгоритм оптимизации методом гра- диентного спуска, достаточно простой в реализации и вычислениях. Существует реализация фильтра как на основе данных акселерометра и гироскопа, так и на основе данных акселерометра, гироскопа и магнетометра (рис. 7).
На выходе фильтра Мэджвика получается нормализованный кватернион – четырехмерное комплексное число, которое может быть использовано для представления ориентации остроконечного тела или координат в трехмерном пространстве10. Из кватерниона легко получить все углы, описывающие положение тела в пространстве (курс, тангаж, крен).
Тангаж (град.) вычисляется по формуле:
pitch = arcsin (–2 ∙ ( q 1 ∙ q 3 – q 0 ∙ q 2)), (5) где q 0 , q 1 , q 2 , q 3 – значения компонентов кватерниона.
Результаты исследования
Была разработана конструкция и изготовлен датчик положения движителя трактора (рис. 8). Основным элементом датчика является ИНС на основе MEMS-микросхемы MPU-9250.
MPU-925011 – микросхема размерами 3×3×1 мм. В корпусе устройства объединены два кристалла: на одном размещен трехосевой гироскоп и трехосевой акселерометр, а на втором – трехосевой магнитометр AK8963 фирмы Asahi Kaisei Microdevices. Данные с гироскопа, акселерометра и магнитометра оцифровываются встроенным 16-битными аналого-цифровым преобразователем, обрабатываются цифровым процессором DMP (Digital Motion Processor) фирменными алгоритмами Motion Fusion и передаются внешнему управляющему устройству по шине данных I2C или SPI.
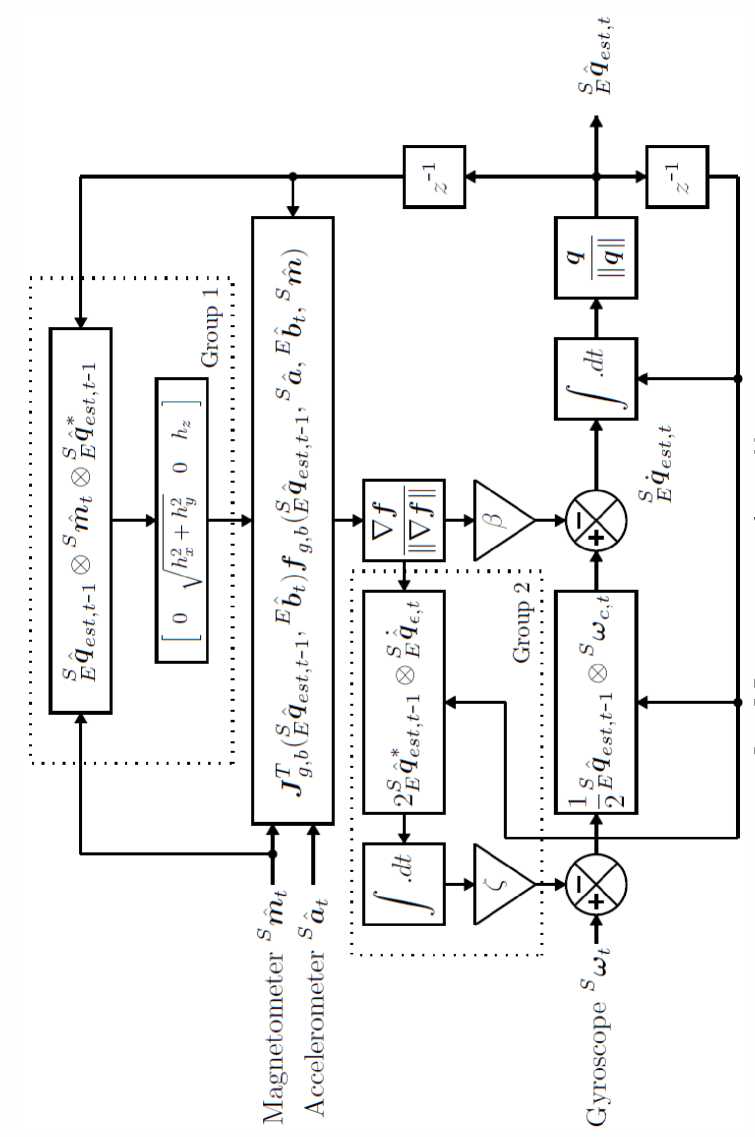
Р и с. 7. Блок-схема полного фильтра Мэджвика F i g. 7. The block diagram of a full Madgwick filter

Р и с. 8. Инерциальный датчик буксования трактора ИП-291
F i g. 8. IP-291 inertial wheel slip sensor
Датчик буксования состоит из следующих основных компонентов:
‒ MEMS-микросхема ИНС MPU-9250;
‒ процессор STM32F405;
‒ модуль беспроводной связи Wi-Fi ESP8266;
‒ Li-ion аккумулятор;
‒ корпус.
Для обработки данных MPU-9250 внутри датчика используется мощный микроконтроллер STM32F405.
Питание датчика осуществляется аккумулятором Li-ion емкостью 3 000 мА∙ч с системой контроля заряда.
Важной особенностью датчика является применение модуля беспроводной связи ESP8266 с подключаемой внешней антенной для передачи данных в измерительную информационную систему.
MEMS-микросхема MPU-9250 формирует исходные данные о положении в пространстве со скоростью 1 000 раз/сек. Затем они передаются в контроллер STM32F405 по шине SPI на рабочей частоте 1 МГц. Для обработки данных в контроллере реализован алгоритм на основе фильтра Мэджвика, который позволяет добиться среднеквадратического отклонения при определении углов 0,8° в подвижном состоянии. Скорость вращения датчика определяется на основании изменения его положения в пространстве, а именно крена и тангажа.
Крен колеса может дать незначительную погрешность для расчета, поскольку проекция колеса на вертикальную плоскость при отклонении от вертикального положения представляет собой не окружность, а овал. Однако значение тангажа при любом значении крена, отличном от 90°, будет всегда совпадать в 4-х положениях при полном обороте колеса: 2-х вертикальных и 2-х горизонтальных. Учитывая также, что в нормальных условиях колеса трактора имеют незначительное отклонение от вертикали, значением крена можно пренебречь.
Мгновенные значения углов по тангажу и крену и рассчитанная текущая частота вращения колеса передаются по беспроводному каналу связи Wi-Fi на измерительную систему для расчета коэффициента буксования. В зависимости от типа измерительной системы данные передаются по протоколу Modbus RTU или DCON.
Программное обеспечение контроллера STM32F405 датчика написано на языке C в среде разработки MikroC12. При написании программы были использованы открытые исходные коды реализации фильтра Мэджвика на языке C#13.
Программа датчика позволяет гибко настраивать выходной формат данных для измерительных информационных систем. Выходные данные могут быть
Т а б л и ц а 1
T a b l e 1
представлены в виде показаний счетчика интервалов через заданный угол. В таком случае не требуется никаких изменений в программе измерительной информационной системы, поскольку система воспринимает подключенный датчик за ИП-268.
Для работы датчик ИП-291 достаточно закрепить на диске ведущего колеса трактора (рис. 9).

Р и с. 9. Датчик ИП-291, установленный на колесе МТЗ-82
F i g. 9. IP-291 sensor installed on wheel of MTZ-82 tractor
При проведении сравнительных испытаний датчика буксования на ведущем колесе трактора одновременно были установлены два датчика: ИП-291 (экспериментальный) и ИП-268 (базовый). Оба датчика подключены к измерительной информационной системе ИП-264. Датчик ИП-291 настроен на счет импульсов с дискретностью 10°; ИП-268 снабжен диском с 36 прорезями также через 10°. Во время испытаний система ИП-264 рассчитывала теоретический пройденный путь и буксование на основании данных датчиков. Трактор сделал 3 заезда на участке 50 м. Для определения реального пройденного пути использовалось 5-е колесо. Пройденный путь рассчитывался по формуле:
S = 2 π ∙ R ∙ ( n ∙ ∆ ) / 360, (6) где R – радиус колеса, м; n – количество импульсов, полученных от датчика, шт.; ∆ – цена импульса, град.
Буксование трактора рассчитывалось по формуле (3).
Краткая техническая характеристика датчиков ИП-268 (классический) и ИП-291 (на основе ИНС)
Brief technical specification of IP-268 (classical) and IP-291 (based on INS) sensors
|
Наименование показателя / Indicator name |
Значение / Value |
|
|
ИП-268 / IP-268 |
ИП-291 / IP-291 |
|
|
Напряжение питания, В / Supply voltage, V |
От 12 до 24 / From 12 to 24 |
5 |
|
Потребляемая мощность, Вт / Power consumption, W |
≤ 1 |
≤1 |
|
Количество импульсов на один оборот на 360°, шт. / Number of pulses per revolution 360°, units |
48 |
От 1 до 360 / From 1 to 360 |
|
Точность определения времени, мс / Time accuracy, ms |
– |
1 |
|
Расчет мгновенной угловой скорости / Calculation of instantaneous angular velocity |
Нет / No |
Есть / Yes |
|
Температура окружающей среды, °С / Ambient temperature, °C |
От +1 до +60 / From +1 to +60 |
От +1 до +60 / From +1 to +60 |
|
Габаритные размеры, мм / Overall dimensions, mm |
135х125х125 |
120х60х30 |
|
Масса, кг / Weight, kg |
1,5 |
0,3 |
Т а б л и ц а 2
T a b l e 2
Результаты сравнительных испытаний приведены в табл. 2.
Данные испытания показали, что точность определения буксования у датчика ИП-291 и датчика ИП-268 не имеет значимых различий. Время монтажа ИП-291 составило 3 мин, ИП-268 – 2 ч с учетом установки штанги и прокладки информационных кабелей. Для разработанного датчика ИП-291 установка фиксирующей штанги и прокладка кабелей не требуется.
Обсуждение и заключения
Инерциальный датчик буксования трактора по сравнению со стандартными решениями имеет следующие преимущества:
‒ может использоваться на любых видах тракторов и сельскохозяйственной техники;
‒ не требует изготовления фиксаторов под конкретную модель трактора;
‒ не требует вмешательства в конструкцию трактора для установки фиксатора;
‒ не содержит вращающиеся части;
‒ не требует изготовления и установки гибкой муфты для соединения ступицы колеса и ротора датчика;
‒ не требует соединительных информационных кабелей для связи с измерительной информационной системой;
‒ позволяет настраивать дискретность измерения угла поворота колеса в зависимости от конкретных требований к точности;
‒ рассчитывает мгновенную угловую скорость ведущего колеса для индикации мгновенной скорости трактора.
Применение датчика ИП-291 позволяет значительно сократить время подготовки машины к испытаниям. Исключение фиксатора, соединительной муфты и кабелей связи упрощает монтаж и удешевляет проведение испытаний сельскохозяйственной техники.
Результаты сравнительных испытаний датчиков
ИП-268 (классический) и ИП-291 (на основе ИНС)
The results of comparative tests of IP-268 (classical) and IP-291 (based on INS) sensors
|
№ опыта / Test number |
ИП-268 / IP-268 |
ИП-291 / IP-291 |
||
|
Теоретический путь, м / Theoretical path, m |
Буксование, % / Slipping, % |
Теоретический путь, м / Theoretical path, m |
Буксование, % / Slipping, % |
|
|
1 |
51,2 |
2,34 |
51,3 |
2,53 |
|
2 |
51,7 |
3,29 |
52,0 |
3,84 |
|
3 |
50,8 |
1,57 |
50,9 |
1,77 |
Поступила 22.11.2017; принята к публикации 12.12.2017; опубликована онлайн 20.03.2018
Об авторах:
Все авторы прочитали и одобрили окончательный вариант рукописи.
Submitted 22.11.2017; revised 12.12.2017; published online 20.03.2018
All authors have read and approved the final version of the manuscript.
Список литературы Применение инерциальной навигации для определения буксования сельскохозяйственных тракторов
- Кузнецов Н. Г., Гапич Д. С., Ширяева Е. В. К вопросу об определении допустимого коэффициента буксования полноприводного колесного трактора//Известия нижневолжского агро-университетского комплекса: наука и высшее профессиональное образование. 2014. Т. 34, № 2. С. 176-179. URL: https://elibrary.ru/item.asp?id=21624493
- Лопарев А. А., Венглинский А. М., Комкин А. С. Исследование процесса буксования ведущих колес трактора МТЗ-100 в режиме трогания с места и разгона//Тракторы и сельхозмашины. 2014. № 1. С. 18-20. URL: https://elibrary.ru/item.asp?id=21048083
- Лопарев А. А., Венглинский А. М., Комкин А. С. Снижение буксования колесных универсально-пропашных тракторов при выполнении технологических операций//Технология колесных и гусеничных машин. 2014. № 4. С. 30-35. URL: https://elibrary.ru/item.asp?id=21955470
- Горшков Ю. Г., Четыркин Ю. Б., Калугин А. А. Регистрирующий комплекс для исследования буксования и КПД дифференциала и движителя колесной машины//Тракторы и сельхозмашины. 2012. № 11. С. 13-15.
- Reina G. Methods for wheel slip and sinkage estimation in mobile robots//Robot Localization and Map Building. 2010. March. P. 561-578. DOI: 10.5772/9279
- Slippage, detection with piezoresistive tactile Sensors/A. Rocco //Sensors. 2017. August. P. 15 DOI: 10.3390/s17081844
- Current-based slippage detection and odometry correction for mobile robots and planetary rovers/L. Ojeda //IEEE Transactions on Robotics. 2006. Vol. 22, no. 2. P. 366-378. URL: http://ieeex-plore.ieee.org/abstract/document/1618745
- Rovira-Mas F. Sensor architecture and task classification for agricultural vehicles and environments//Sensors. 2010. № 10 (12). C. 11226-11247 DOI: 10.3390/s101211226
- Разработка системы стабилизации угла отклонения балансирующего робота/Д. С. Федоров //Автоматика и программная инженерия. 2015. Т. 12, № 2. С. 16-34. URL: https://elibrary.ru/item.asp?id=25386110
- Куликова М. В., Куликов Г. Ю. Численные методы нелинейной фильтрации для обработки сигналов и измерений//Вычислительные технологии. 2016. № 4. С. 64-98. URL: https://elibrary. ru/item.asp?id=26584489
- Кудрявцева И. А. Анализ эффективности расширенного фильтра Калмана, сигма-точечного фильтра Калмана и сигма-точечного фильтра частиц//Научный вестник Московского государственного технического университета гражданской авиации. 2016. Т. 224, № 2. С. 43-51. URL: https://elibrary.ru/item.asp?id=25811419
- Marcovich L. Inferences from optimal filtering equation, Kalman's filter and theorem on normal correlation//Управление, информация и оптимизация. 2014. С. 40. URL: https://elibrary.ru/item. asp?id=22012842
- Куликов Р. С. Сравнение точностей нелинейной фильтрации в расширенном фильтре Калмана и в Ансцентном фильтре//Радиотехника. 2016. № 9. С. 135-140. URL: https://elibrary.ru/item. asp?id=27443008
- Ontiveros-Gallardo S. E., Kober V. Objects tracking with adaptive correlation filters and Kal-man filtering//Proceedings of SPIE -The International Society for Optical Engineering. 2015. 95980X DOI: 10.1117/12.2187109
- Kulikova M. V., Tsyganova J. V. Constructing numerically stable Kalman filter-based algorithms for gradient-based adaptive filtering//International Journal of Adaptive Control and Signal Processing. 2015. № 11. P. 1411-1426 DOI: 10.1002/acs.2552
- Mahony R., Hamel T., Pflimlin J.-M. Nonlinear complementary filters on the special orthogonal group//IEEE Transactions on Automatic Control. 2008. Vol. 53, no. 5. P. 1203-1218. URL: https://hal. archives-ouvertes.fr/hal-00488376
- Кузнецов А. В., Павловский А. М. Повышение точности инерциального измерительного модуля на MEMS-датчиках//Вiсник Нацiонального технiчного Унiверситету України «Київський полiтехнiчний iнститут». 2015. Т. 50, № 2. С. 5-11. URL: https://elibrary.ru/item.asp?id=26154868
