Применение контроллера реального времени “CompactRIO” для модернизации стендового оборудования по испытанию и регулированию гидравлических приводов

Автор: Гареев Альберт Минеасхатович, Кириллов Алексей Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-3 т.15, 2013 года.
Бесплатный доступ
В статье рассмотрен метод применения контроллера реального времени “CompactRIO” для модернизации стендового оборудования лаборатории на примере стенда по испытанию и регулированию гидравлических приводов.
Моделирование, гидравлический привод, исследовательская работа
Короткий адрес: https://sciup.org/148205683
IDR: 148205683 | УДК: 62-503.55
Using of “CompactRIO” controller for upgrading of hydraulic servo testing device
In this article we describe the upgrading method of hydraulic servo testing device. Upgrading is realize with the application of “compactRIO” controller and LabVIEW software.
Текст научной статьи Применение контроллера реального времени “CompactRIO” для модернизации стендового оборудования по испытанию и регулированию гидравлических приводов
Комбинированный гидроусилитель КАУ-30Б применяется в системах управления вертолётами и предназначен для снятия нагрузок с командных рычагов управления. КАУ-30Б устанавливается в системах продольного, поперечного управления и управления общим шагом несущего винта.
Лабораторный стенд имеет свою гидросистему, систему питания электроэнергией, органы управления и средства измерения. При этом обеспечены следующие виды работ, согласно технологическим картам:
-
1. Проверка разности скоростей движения исполнительного штока при ручном управлении;
-
2. Регулирование исходного положения золотника ручного управления;
-
3. Проверка средней скорости движения исполнительного штока при ручном управлении;
-
4. Проверка зоны нечувствительности агрегата по золотнику ручного и комбинированного управления;
-
5. Проверка хода золотника ручного и комбинированного управления;
-
6. Проверка работы редукционного клапана.
Несмотря на техническую сложность и широкий спектр решаемых задач, при современном уровне развития технологий эффективность применения подобного стенда в учебном процессе неизбежно снижается. Это связано с отсутствием в работе современных автоматизированных средств сбора и обработки информации; устареванием элементной базы; отсутствием периодической метрологической поверки средств измерений; и, в конце концов, износом оборудования.
Вышеизложенные аспекты определяют актуальность модернизации стендового оборудования путём создания программно-аппаратного комплекса управления стендом (КУС). Общая структурная схема КУС представлена на рис. 1.
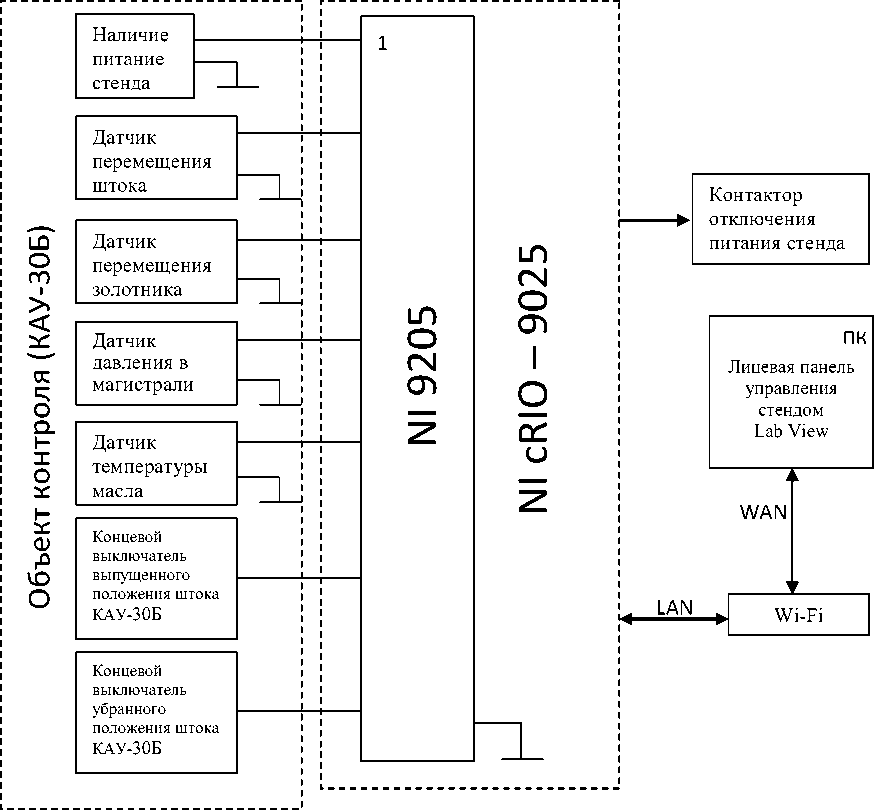
Рис. 1. Структурная схема КУС
Программируемый контроллер NI CompactRIO представляет собой многофункциональную встраиваемую систему сбора данных и управления, разработанную для задач, требующих высокой производительности и надёжности измерительных и управляющих систем.
В качестве входной информации используется информация с датчиков на стенде
(см. рис. 1), а так же информация о состоянии концевых выключателей крайних положений выходного вала КАУ-30Б.
Контроллер CompactRIO взаимодействует с персональным компьютером (ПК) под средством сетевого соединения. При этом возможны следующие схемы:
-
1. CompactRIO – LAN – Wi-Fi роутер – WAN – ПК;
-
2. CompactRIO – LAN – ПК.
Первая схема применяется в случае удалённого взаимного расположения Compact-RIO и ПК. Вторая схема не требует наличия Wi-Fi роутера и имеет более простые настройки.
Установка сетевого соединения выполняется средствами операционной системы ПК (Windows
XP SP3, Windows Vista, Windows 7, Windows 8). С помощью утилиты MAX вводятся настройки сетевого подключения для контроллера: имя устройства, IP-адрес, DNS-сервер, шлюз и другие стандартные настройки (рис. 2).
Network Adapters
^ Ethernet Adapter etho (Primary)
Adapter Mode TCP/IP Network
MAC Address 00:80:2F: 13:20:C4
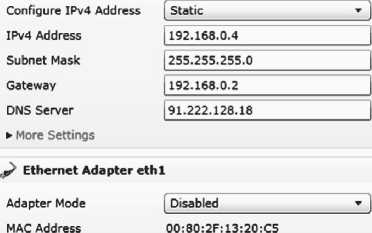
Рис. 2. Настройки сетевого подключения NI cRIO-9025
В качестве модуля ввода/вывода информации применён модуль
С-серии NI 9205, предназначенный для обработки аналоговой информации в диапазоне напряжений + 10 В.
NI 9205 представляет собой 32 канальный (для подключения несимметричных сигналов) / 16 канальный (для подключения дифференциальных сигналов) модуль аналогового ввода. Каждый канал аналогового ввода имеет AI терминал, к которому можно подключить устройство аналогового вывода. NI 9205 поддерживает составную частоту дискретизации 250 кГц, а также имеет возможность синхронизации. Каналы
NI 9205 имеют общую земляную шину, изолированную от других модулей, включенных систему. Все каналы снабжены измерительным усилителем с программируемым усилением и мультиплексируются на вход аналого-цифрового преобразователя. Каждый канал также снабжен схемой защиты от перегрузок по напряжению свыше 30В.
CompactRIO получает информацию о состоянии гидросистемы, температурного режима и скоростных характеристиках штока гидроусилителя КАУ-30Б и передаёт её под средством сетевого соединения на персональный компьютер. Полученная информация обрабатывается программой, разработанной средствами LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) - это среда разработки и платформа для выполнения программ, созданных на графическом языке программирования “G”. Графический язык программирования “G” основан на архитектуре потоков данных, где последовательность выполнения операторов определяется не порядком их следования, а наличием данных на входах этих операторов. Операторы, не связанные по данным, выполняются параллельно в произвольном порядке. Фрагмент блок-диаграммы программы в режиме измерения времени выпуска и уборки исполнительного штока КАУ-30Б представлен на рис. 3.
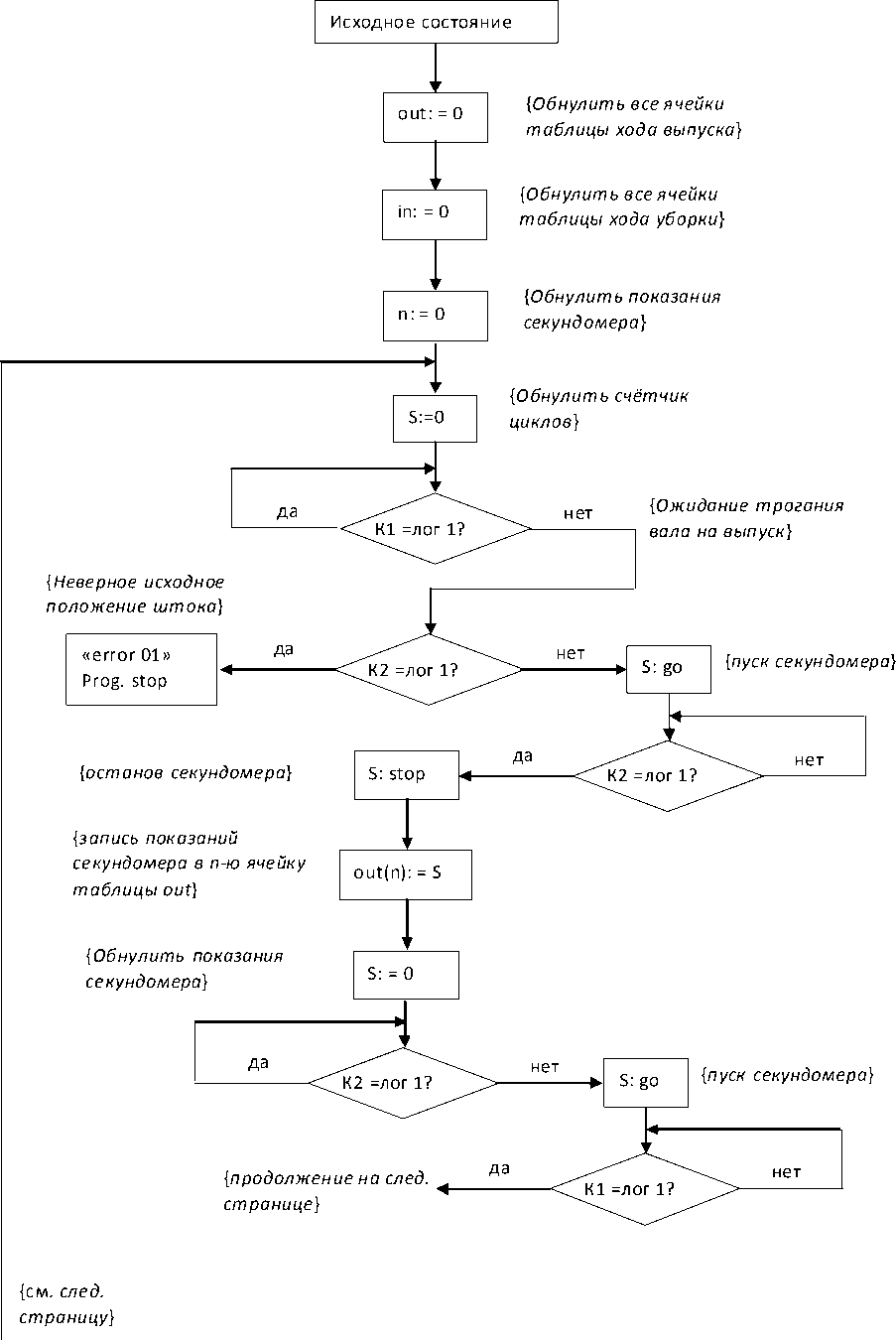
Блок-диаграммы разных режимов работы КУС составлены в соответствии с разработанны- ми алгоритмами. Для примера на рис. 4 представлен алгоритм работы блок-диаграммы в режиме проверки разности скоростей движения исполнительного штока КАУ-30Б.
В данном режиме работы стенда производится проверка скоростей движения выходного исполнительного штока КАУ-30Б. В случае, если разность скоростей движения штока будет больше 15% (от наибольшего значения скорости), то необходимо произвести регулирование исходного положения золотника ручного управления.
При работе стенда в этом режиме КУС автоматизирует процесс сбора и анализа и индикации информации о скоростях движения исполнительного штока.
При построении алгоритма применены следующие виды переменных:
-
1. S – Значение секундомера (натуральные числа);
-
2. out (n) – Измеренное значение времени выпуска штока КАУ-30Б (массив натуральных чисел из n элементов);
-
3. in (n) – Измеренное значение времени уборки штока КАУ-30Б (массив натуральных чисел из n элементов);
-
4. n – Счётчик циклов (целые числа);
-
5. К1 – состояние концевого выключателя убранного положения вала КАУ-30Б (логическая переменная: “1” - выключатель нажат, “2” -выключатель отпущен);
-
6. К2 - состояние концевого выключателя выпущенного положения вала КАУ-30Б (логическая переменная: “1” - выключатель нажат, “2” -выключатель отпущен);
-
7. dif – Разница между временем выпуска и временем уборки штока
-
8. А - Относительная разница между временем выпуска и временем уборки штока КАУ-30Б (натуральные числа) – рассчитывается в отношении к минимальному из времён: выпуска или уборки.
КАУ-30Б (натуральные числа);
В составе алгоритма заданы следующие условные команды:
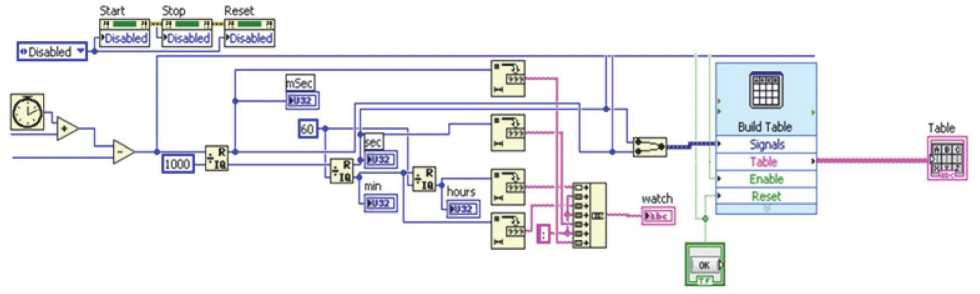
Рис. 3. Фрагмент блок-диаграммы
go – пуск секундомера;
stop – остановка выполнения текущего действия;
error 01 – ошибка выполнения программы, заключающаяся в неверном исходном положении штока КАУ-30Б (в исходном положении шток должен быть убран).
Управление работой стенда и контроль его технического состояния осуществляется с помощью лицевой панели (рис. 5). Лицевая панель
{ см пред. страницу }
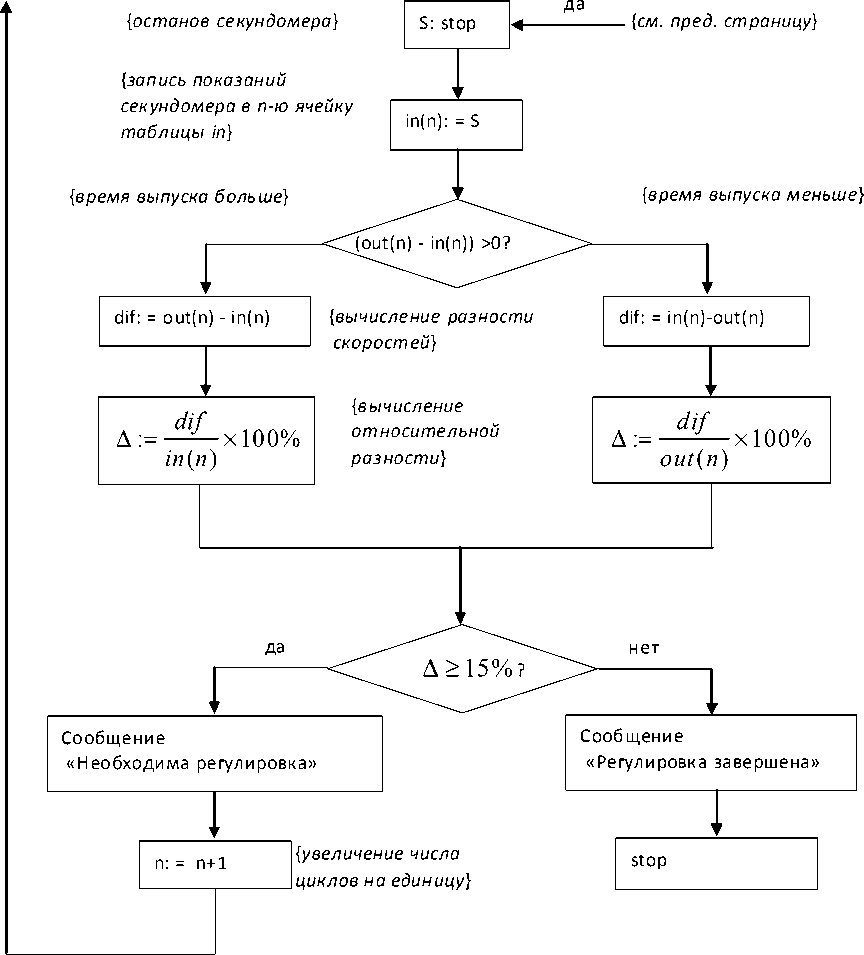
Рис. 4. Алгоритм работы КУС
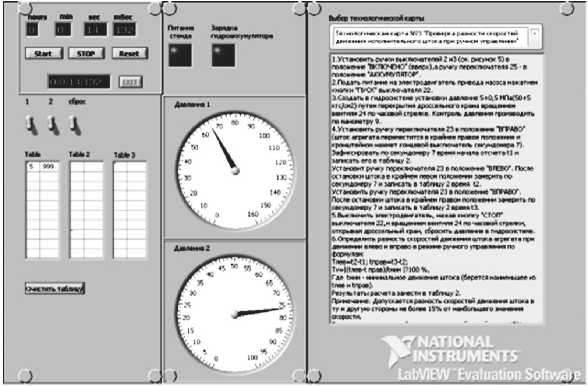
Рис. 5. Панель управления
содержит средства измерения, органы управления и контроля, а также область с методическими рекомендациями по выполнению работы.
Для аварийного отключения стенда имеется управляемый контактор. Управление контактором осуществляется через усилитель (рис. 1).
Массивы данных out (n) и in (n) имеют следующее распределение элементов на лицевой панели управления (рис. 6).
Под циклом программы понимается ход штока КАУ-30Б на выпуск и на уборку. По завершению каждого цикла рассчитывается относительная разница между временем выпуска и временем уборки штока A . в случае, если A больше 15%, - выдаётся сообщение о необходимости регулировки исходного положения золотника ручного управления КАУ-30Б. В этом случае цикл программы повторяется. Если A меньше 15% - регулировка не требуется, работа считается завершённой.
При выполнении подобных лабораторных работ студенты не только приобретают знания об устройстве и работе гидроусилителя КАУ-30Б, но и знакомятся с современными методами и технологиями сбора и обработки информации.
|
Время выпуска |
Время уборки |
|
out 1 |
in 1 |
|
out 2 |
in 2 |
|
out 3 |
in 3 |
|
: |
: |
|
out n |
in n |
Рис. 6. Распределение элементов в массивах “in” и “out”
Список литературы Применение контроллера реального времени “CompactRIO” для модернизации стендового оборудования по испытанию и регулированию гидравлических приводов
- Разработка прикладного программного обеспечения в среде LabVIEW: учебное пособие/Н.А. Виноградова, Я.И. Листратов, Е.В. Свиридов. М.: Издательство МЭИ, 2005.
- LabVIEW для радиоинженера: от виртуальной модели до реального прибора. Практическое руководство для работы в программной среде LabVIEW/Ю.К. Евдокимов, В.Р. Линдваль, Г.И. Щербаков. М.: ДМК Пресс, 2007. 400 с.
- Киселев Д.Ю., Киселев Ю.В. Общие сведения и конструкция гидравлической системы вертолета Ми-8: [электронный ресурс]. Самар. гос. аэрокосм. ун-т (нац. исслед. ун-т), 2012.
