Применение кусочно-линейной аппроксимации вероятностно-временных характеристик систем массового обслуживания

Автор: И.Л. Крикунов, К.Э. Гаипов
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 4, 2020 года.
Бесплатный доступ
На сегодняшний момент времени от спутниковых технологий в той или иной степени зависят многие современные отрасли. Для построения таких спутниковых систем связи необходима оценка параметров качества обслуживания, одним из которых является время задержки информации. Для реализации математической модели спутниковой сети используются такие аналитические выражения для временных задержек, которые имеют неустранимый разрыв второго рода в момент времени, когда интенсивность поступления трафика становится равной интенсивности обслуживания. Устранение данной особенности позволило бы сократить время расчета оптимальных маршрутов. В представленной работе для достижения поставленной цели используется кусочно-линейная аппроксимация. В качестве способа задания прямых рассматриваются два подхода, которые сравниваются с помощью интегрального метода наименьших квадратов, а также рассмотрен вопрос о количестве используемых прямых в условиях поставленной задачи. В качестве результатов были получены аппроксимационные зависимости, позволяющие построить кусочно-линейную функцию среднего времени ожидания в буфере для системы М/М/1. Описана процедура нахождения оптимальных параметров для данной функции, а также аналитическим методом были получены приближенные формулы нахождения точек касания прямых, зависящие от поступающей интенсивности трафика.
Спутниковый канал, оптимальная маршрутизация, целевая функция, кусочно-линейная аппроксимация
Короткий адрес: https://sciup.org/14117460
IDR: 14117460 | УДК: 004.72 | DOI: 10.26732/j.st.2020.4.04
Application of piecewise-linear approximation of probabilistic-time characteristics of queuing systems
Nowadays many modern industries depend on satellite technologies to a greater or lesser extent. To build such satellite communication systems it is necessary to have estimated parameters of high service quality, one including the information delay time. To implement a mathematical model of traffic distribution in a satellite network, such analytical expressions for time delays are used, which have a discontinuity of the second kind at the moment when the arrival rate becomes equal to the service rate. Removal of this discontinuity can reduce the time required for calculating optimal routes. To achieve this goal, a piecewise linear approximation is used. As a way of specifying line segments, two approaches are considered, which are compared using the integral least squares method and the issue of the number of lines used in the conditions of the problem is also considered. As a result, approximation dependences were obtained, which allows plotting a piecewise-linear function of the mean waiting time in the buffer for the M/M/1 system. The procedure for finding the optimal parameters for this function is described and the analytical method was used to obtain approximate formulas for finding the tangency points of depending on the incoming traffic intensity.
Текст статьи Применение кусочно-линейной аппроксимации вероятностно-временных характеристик систем массового обслуживания
Актуальность задачи оптимальной маршрутизации заключается в том, что на текущий момент отсутствуют механизмы и протоколы управления трафиком в зависимости от загрузки спутниковых каналов связи.
Под оптимальной маршрутизацией будем понимать такой алгоритм выбора маршрутов между источником и получателем, при котором выполняется условие, что на всех интерфейсах маршрутизаторов и/или коммутаторов будет находиться минимальное число пакетов или суммарное время нахождения пакетов во всех интерфейсах будет минимально, что можно записать в виде целевой функции вида:
F = £ N i ( X ) или F 2 = £ T i ( X ), где N i (X) - число пакетов на i -ом маршрутизаторе и/или коммутаторе; T i (X) - время нахождения
пакетов на i -ом маршрутизаторе и/или коммутаторе.
Данные задачи были решены в работах Галлагера, Крона, Парфенова, Гаипова, Пономарева и Вишневского [1–8]. Особенностью решения таких задач является то, что каждое слагаемое целевой функции F j и F 2 является функцией, имеющей разрыв в точке λ = μ, что позволяет решить эту задачу, предварительно решив систему линейных ограничений для определения начальной точки итерации, нужной для численных методов решения задач нелинейного программирования, к которым и относится задача поиска минимума целевой функции.
Решение задачи поиска начальной итерации увеличивает время решения задачи оптимальной маршрутизации, поэтому целью исследования является уменьшение времени нахождения минимума целевой функции. Для этого необходимо решить две задачи:
-
• устранение разрыва в функциях N i (X) и T i (X) путем выбора оптимального метода аппроксимации;

Kl/IE
АППАРАТЫ И
Том 4
-
• анализ выигрыша времени и точности найденного решения с первоначальным алгоритмом.
1. Выбор типа аппроксимации
Как было сказано ранее, функциональная зависимость вероятностно-временных характеристик различных систем массового о бслуживания, таких как средняя длина очереди N или среднее время нахождения данных на ожидании t в точке, когда интенсивность поступления данных равна интенсивности их обслуживания, имеет разрыв
220 второго рода.
В качестве примера приведем функциональ- ную зависимость среднего времени ожидания, из которого явно видно, что при λ=μ имеет место разрыв. Далее в качестве модели, описывающей интерфейс коммутационного устройства, подключенного к спутниковому каналу, будем использовать систему массового обслуживания М/М/1. Данная зависимость имеет вид:
i f (X=
µ
i -
X ,
µ где μ – скорость работы интерфейса маршрутиза- тора.
Для решения задачи оптимального распределения трафика в качестве критерия, как правило, выбирается сумма средних времен ожидания ∑ t или сумма средних очередей ∑ N . Для нахождения минимума таких целевых функций необходимо вначале найти область определения данной функции и в этой области выбрать точку начальной итерации для применения методов динамического программирования.
Для устранения этапа нахождения точки начальной итерации необходимо устранить разрыв второго рода и сделать так, чтобы функциональная зависимость средней длины очереди или среднего времени ожидания на всей области определения была монотонно возрастающей и выпуклой функцией. Для существующих зависимостей это условие выполняется в интервале [0; μ). Для преодоления этой проблемы в данной работе рассматривается аппроксимация вероятностно-временных характеристик для систем массового обслуживания.
Рассмотрим полиномиальную аппроксимацию. Разложим исходную функцию f(x) в ряд Тейлора. Получаем сумму слагаемых, имеющих вид:
M xi
f(x) пол = £ “’ i=0 Ц где μ – скорость работы интерфейса маршрутизатора, М – количество слагаемых в ряду.
Если использовать этот вид аппроксимации, то он устранит разрыв второго рода, но функция не будет выпукла на всей области допустимых значений, что отображено на рис. 1.
Для кусочно-линейной аппроксимации рассмотрим два подхода, с помощью которых задаются прямые [9]:
-
• прямая, касающаяся исходной функции;
-
• прямой, являющаяся хордой исходной функции.
Для выбора наилучшего метода составим уравнения этих прямых для двух подходов, используя две, три и четыре прямые. В качестве критерия оценивания будем использовать ошибку аппроксимации, которая находится по формуле:
y ( i + 1)
-
5 = 2 J [ ^ ( x ) - fi ( x ) ] 2 dx ,
iyi где s – ошибка аппроксимации, f(x) – исходная нелинейная функция, fi(x) – кусочно-линейная функция, i – количество прямых в кусочно-линейной функции.
В данном методе ошибка аппроксимации представляет собой сумму интегралов, где под знаком интеграла находится разность исходной и линейной функций [10].
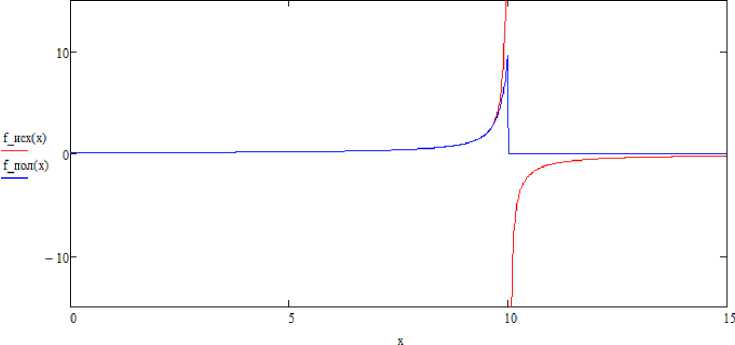
Рис. 1. Графики исходной функции и полиномиального ряда
Расчет ошибки аппроксимации необходимо начать с нахождения оптимальных параметров ( x 0, x 1, ..., xi ) для метода касательных и ( a , b , …, i ) для метода хорд. Под оптимальными параметрами понимаются такие значения, при которых ошибка аппроксимации минимальна для каждого рассмотренного варианта.
В данной задаче ошибка аппроксимации является функцией с множеством локальных экстремумов, т. е. она многоэкстремальная. Аналитическое нахождение минимальных значений приводит к решению систем нелинейных уравнений, что не позволяет аналитически определить все точки экстремума. В связи с этим для нахождения оптимальных параметров данной функции был осуществлен перебор точек начальной итерации для использования метода сопряженного градиента, встроенного в пакет инженерного математического ПО MathCad. Для перебора точек начальной итерации в среде MathCad был исполь- зован алгоритм перебора параметров (x0, x1, ..., xi) для метода касательных и (a, b, …, i) для метода хорд с учетом следующих особенностей:
-
• каждый следующий параметр должен быть строго больше предыдущего ( xi -1< xi или a < b );
-
• все параметры для двух методов должны удовлетворять области допустимых значений;
-
• случаи с отрицательным значением ошибки аппроксимации не должны рассматриваться.
Получив оптимальные значения точек касания и пересечения прямых, необходимо рассчитать значения ошибки при различных интенсивностях поступления трафика. Минимальные зна- 221 чения ошибки аппроксимации и параметров при различных μ представлены в табл. 1.
Из табл. 1 видно, что метод с использованием касательных имеет значительно меньшую ошибку по сравнению с методом хорд при равных условиях. В дальнейших расчетах целесообразно использовать именно этот подход.
Таблица 1
значениях параметра μ
|
Количество прямых |
Касательная |
Хорда |
||||
|
μ = 10 |
μ = 30 |
μ = 50 |
μ = 10 |
μ = 30 |
μ = 50 |
|
|
2 |
s = 18,555 |
s = 20,894 |
s = 21,611 |
s = 9360 |
s = 9580 |
s = 9720 |
|
3 |
s = 5,845 |
s = 6,938 |
s = 7,311 |
s = 31,25 |
s = 68,863 |
s = 74,105 |
|
4 |
s = 2,612 |
s = 3,111 |
s = 3,276 |
s = 31,2 |
s = 50,91 |
s = 62,61 |
Таблица 2
Зависимость ошибки аппроксимации от числа прямых
|
Количество прямых |
Интенсивность поступления трафика |
|||||
|
μ = 10 |
μ = 30 |
μ = 50 |
μ = 100 |
μ = 150 |
μ = 300 |
|
|
2 |
s = 18,555 |
s = 20,894 |
s = 21,611 |
s = 22,302 |
s = 22,59 |
s = 22,933 |
|
3 |
s = 5,845 |
s = 6,938 |
s = 7,311 |
s = 7,695 |
s = 7,875 |
s = 8,071 |
|
4 |
s = 2,612 |
s = 3,111 |
s = 3,276 |
s = 3,47 |
s = 3,568 |
s = 3,699 |
|
5 |
s = 1,085 |
s = 1,375 |
s = 1,489 |
s = 1,633 |
s = 1,682 |
s = 1,797 |
|
6 |
s = 0,566 |
s = 0,731 |
s = 0,799 |
s = 0,879 |
s = 0,949 |
s = 1,054 |
|
7 |
s = 0,322 |
s = 0,422 |
s = 0,463 |
s = 0,514 |
s = 0,56 |
s = 0,682 |
|
8 |
s = 0,196 |
s = 0,258 |
s = 0,286 |
s = 0,319 |
s = 0,346 |
s = 0,42 |
Таблица 3
Зависимость оптимальных точек касания от интенсивности поступления вызовов
|
Интенсивность поступления вызовов μ |
x 1 |
x 1/μ |
x 2 |
x 2/μ |
x 3 |
x 3/μ |
|
1 |
0,4979 |
0,4979 |
0,9374 |
0,9374 |
0,9819 |
0,9819 |
|
50 |
35,5196 |
0,71 |
49,8869 |
0,9977 |
49,9787 |
0,99957 |
|
60 |
42,976 |
0,7163 |
59,8859 |
0,9981 |
59,9786 |
0,99967 |
|
70 |
50,4583 |
0,72 |
69,8852 |
0,9984 |
69,9786 |
0,99969 |
|
80 |
57,9804 |
0,725 |
79,8845 |
0,9986 |
79,9786 |
0,99973 |
|
90 |
65,5336 |
0,7282 |
89,8841 |
0,9987 |
89,9785 |
0,99976 |
|
100 |
73,0281 |
0,73 |
99,8839 |
0,999 |
99,9785 |
0,99979 |
|
110 |
80,6379 |
0,733 |
109,8834 |
0,999 |
109,9785 |
0,9998 |
|
120 |
88,261 |
0,7355 |
119,8831 |
0,9991 |
119,9785 |
0,99982 |
|
130 |
96,1238 |
0,7394 |
129,8822 |
0,9991 |
129,9785 |
0,99983 |
|
140 |
104,9985 |
0,75 |
139,8867 |
0,9992 |
139,9786 |
0,99985 |
Продолжение таблицы 3
|
150 |
112,997 |
0,7533 |
149,8825 |
0,9992 |
149,9785 |
0,99986 |
|
160 |
118,584 |
0,741 |
159,8823 |
0,9993 |
159,9784 |
0,99987 |
|
170 |
126,9897 |
0,747 |
169,8815 |
0,9993 |
169,9784 |
0,99987 |
|
180 |
134,0347 |
0,7446 |
179,8814 |
0,9993 |
179,9784 |
0,99988 |
|
190 |
141,3977 |
0,744 |
189,8807 |
0,9994 |
189,9784 |
0,99989 |
|
200 |
149,4555 |
0,7473 |
199,8838 |
0,9994 |
199,9786 |
0,99989 |
|
250 |
186,6238 |
0,7465 |
249,8811 |
0,9995 |
249,9784 |
0,99991 |
|
300 |
225,12 |
0,75 |
299,8793 |
0,9996 |
299,9783 |
0,99993 |
|
350 |
267,2272 |
0,7635 |
349,8853 |
0,9997 |
349,9787 |
0,99994 |
|
400 |
296,2645 |
0,74 |
399,8788 |
0,9997 |
399,9784 |
0,99995 |
|
450 |
357,1871 |
0,7937 |
449,8807 |
0,9997 |
449,9785 |
0,99995 |
|
500 |
380,2357 |
0,76 |
499,8759 |
0,9997 |
499,9781 |
0,99996 |
|
550 |
423,258 |
0,7696 |
549,8836 |
0,9998 |
549,979 |
0,99996 |
|
600 |
462,816 |
0,7714 |
599,8848 |
0,9998 |
599,9794 |
0,99997 |
|
650 |
502,281 |
0,7727 |
649,8846 |
0,9998 |
649,9792 |
0,99997 |
|
700 |
541,842 |
0,774 |
699,8849 |
0,9998 |
699,9794 |
0,99997 |
|
750 |
581,13 |
0,775 |
749,8824 |
0,9998 |
749,979 |
0,99997 |
|
800 |
621,024 |
0,7763 |
799,8846 |
0,9999 |
799,9795 |
0,99997 |
|
850 |
660,654 |
0,777 |
849,8845 |
0,9999 |
849,9745 |
0,99997 |
|
900 |
700,434 |
0,7783 |
899,885 |
0,9999 |
899,9799 |
0,99998 |
|
950 |
740,088 |
0,779 |
949,8845 |
0,9999 |
949,9794 |
0,99998 |
|
1000 |
779,88 |
0,7799 |
999,885 |
0,9999 |
999,9795 |
0,99998 |
Kl/IE
АППАРАТЫ И
ных распределений длительности обслуживания и интервалов между вызовами, для удовлетворительной аппроксимации вероятностно-временных характеристик достаточно провести всего лишь три измерения при загрузках 0,77, 0,999 и 0,9999. Для более точной же аппроксимации можно воспользоваться данной методикой для определения большего числа точек, в которых необходимо проводить измерения.
Также необходимо отметить, что переход на кусочно-линейную аппроксимацию хоть и ре-
Том 4
шает проблему устранения разрыва функции, но также приводит и к ряду других проблем, а именно к выбору метода поиска экстремальных значений функций, которые получаются как линейная комбинация и суперпозиция таких функций, т. к. такая задача становится задачей дискретного программирования. Пока же отметим, что в среде MathCAD, даже при использовании стандартной функции miminize , которая использует квазинью-тоновский метод поиска минимума функции, получается небольшой выигрыш при вычислении.
Список литературы Применение кусочно-линейной аппроксимации вероятностно-временных характеристик систем массового обслуживания
- Галлагер Р., Бертсекас Д. Сети передачи данных. М. : Мир, 1989. 544 с.
- Крон Г. Тензорный анализ сетей : учеб. пособие. М. : Сов. радио, 1978. 720 с.
- Парфенов В. И., Золотарев С. В. Об одном алгоритме решения задачи оптимальной маршрутизации по критерию средней задержки // Вестник ВГУ: сер. Физика. Математика. 2007. № 2. С. 28–32.
- Пономарев Д. Ю., Гаипов К. Э., Подойницына О. И., Шиянов Е. А. Определение целевой функции для решения задачи оптимального распределения трафика тензорным методом // Труды Международной научно-технической конференции «Современные информационные технологии». Пенза. Пензенская государственная технологическая академия. 2009.
- Пономарев Д. Ю. О подходе к анализу сетей массового обслуживания с использованием тензорной методологии // Труды V Международной конференции «Идентификация систем и задачи управления» SICPRO '06. М. Институт проблем управления им. В. А. Трапезникова РАН. 2006.
- Пономарев Д. Ю. Тензорный метод для телекоммуникационных сетей // Труды КГТУ. 2006. № 2–3.
- Вишневский В. М. Теоретические основы проектирования компьютерных сетей. М. : Техносфера, 2003. 512 с.
- Березко М. П., Вишневский В. М., Левнер Е. В., Федотов Е. В. Математические модели исследования маршрутизации в сетях передачи данных // Информационные процессы. 2001. Т. 1. № 2. С. 103–125.
- Вержбицкий В. М. Основы численных методов : учеб. М. : Директ-Медиа, 2013. 847 с.
- Линник Ю. В. Метод наименьших квадратов и основы теории обработки наблюдений. М. : Гос. издание физико-математической литературы, 1962. 352 с.
