Применение лазерного высотомера в качестве резервного измерителя при сближении космических аппаратов на окололунной орбите

Автор: Старовойтов Е.И., Зубов Н.Е.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Бортовые и наземные комплексы управления и системы
Статья в выпуске: 3 (10), 2015 года.
Бесплатный доступ
Предлагается использование лазерного высотомера в качестве резервного измерителя при ручном управлении сближением космических аппаратов (КА) на окололунной орбите. Представлены технические характеристики лазерных и радиолокационных приборов, используемых для измерений при управляемом спуске на поверхность планеты и при сближении КА. Выполнен анализ требований к лазерным высотомерам, предъявляемых к измерительным средствам, используемым при сближении КА. Проведены энергетические расчеты дальности измерений, выполненные с учетом характеристик пассивного КА и требований лазерной безопасности. Рассмотрены методы защиты фотоприемного устройства от перегрузки отраженным сигналом. Определена зависимость ослабления оптического аттенюатора от дальности измерений, обеспечивающего защиту фотоприемного устройства при наличии близкорасположенных диффузно отражающего пассивного КА и уголкового отражателя. Полученные результаты показывают принципиальную возможность применения лазерного высотомера для ручного управления сближением КА на окололунной орбите.
Лазерный высотомер, лазерная локационная система, космический аппарат, ручное управление сближением, резервирование
Короткий адрес: https://sciup.org/14343488
IDR: 14343488 | УДК: 629.78.052.3.076.66:523.34
Using laser altimeter as a backup measuring device during spacecraft rendezvous in lunar orbit
The paper proposes using laser altimeter as a backup measuring device during manual control of spacecraft rendezvous in lunar orbit. It presents engineering specifications of laser and radar devices used for taking measurements during controlled descent onto the planetary surface, and during spacecraft rendezvous. An analysis was conducted of the requirements for laser altimeters as measuring devices in support of spacecraft rendezvous. Energy-based calculations of the measuring range were performed, taking into account the characteristics of the passive spacecraft and laser safety requirements. The paper discusses the methods of protecting the photodetector against saturation with the reflected signal. A relationship was identified between the level of attenuation provided an optical attenuator and the measuring distance, which protects the photodetector in close proximity to a diffusely reflecting passive spacecraft and a retroreflector. The obtained results demonstrate the feasibility of using a laser altimeter for manual control of spacecraft rendezvous in lunar orbit.
Текст научной статьи Применение лазерного высотомера в качестве резервного измерителя при сближении космических аппаратов на окололунной орбите
Пилотируемые экспедиции на Луну включают в себя операции управляемого спуска (посадку) на лунную поверхность взлетнопосадочного комплекса (ВПК), его последующий старт, сближение и стыковку с орбитальным кораблем (ОК) для возвращения экипажа и полезного груза на Землю. Для управления этими операциями, наряду с радиолокационными системами (РЛС) и радиационными измерителями, могут использоваться лазерные приборы. Измерения дальности до подстилающей поверхности и вертикальной скорости при спуске выполняются бортовыми лазерными высотомерами (ЛВ) [1], а определение координат ОК и измерение скорости сближения с ним выполняются бортовыми лазерными локационными системами (ЛЛС) [2].
В предыдущих работах [1, 2] рассматривалась оптимизация массы и энергопотребления ЛВ и ЛЛС, предназначенных для управления спуском и сближением космических аппаратов (КА) на окололунной орбите. Но для применения этих приборов требуется решить дополнительные технические задачи.
В частности, полеты вне околоземной орбиты требуют высокой надежности работы всех систем ВПК и ОК, обеспечивающих безопасное возвращение экипажа на Землю. Актуальными являются всесторонний анализ надежности лазерных приборов и разработка способов ее повышения [3].
В общем случае, обеспечить резервирование ЛЛС достаточно сложно. Оптико-механические узлы практически не резервируются. Дублирование электронных и электромеханических узлов увеличивает их массу более чем в два раза, а потребляемая мощность возрастает в еще большей мере, чем кратность резервирования, из-за введения дополнительных устройств диагностики.
Наиболее простое решение заключается в установке на борту ВПК двух одинаковых ЛЛС, но такой вариант может быть неприемлем из-за ограничений массы, габаритов и потребляемой мощности бортовой аппаратуры. Кроме того, роль активного КА при сближении, в зависимости от ситуации, может выполнять как ВПК, так и ОК, как это было реализовано в программе «Аполлон» [4].
Для повышения надежности целесообразно установить измерители параметров сближения на обоих КА, при этом ВПК должен иметь резервный измеритель, предназначенный для ручного управления сближением. Тогда в случае отказа ЛЛС ВПК может быть выведен на дальность от ОК не более 1,5 км за счет средств автономной навигации [5].
В этой связи представляет интерес использование в качестве резервного измерителя прибора, аналогичного по принципу действия и конструкции бортовой ЛЛС, — бортового ЛВ, предназначенного для управления спуском на лунную поверхность. В рассматриваемом случае экипаж с помощью ЛВ может определить дальность и скорость продольного относительного движения и осуществить ручное сближение.
Для исследования возможностей резервирования ЛЛС за счет ЛВ сравним основные характеристики радиолокационных и лазерных приборов (табл. 1), используемых для управления спуском, сближением и стыковкой космического аппарата.
Таблица 1
Технические характеристики радиолокационных и лазерных приборов для управления спуском, сближением и стыковкой
|
Прибор |
Измеряемые дальности |
Погрешность измерения дальности, м |
Погрешность измерения скорости, м/с |
Расходимость зондирующего излучения |
Частота обновления информации, Гц |
Потребляемая мощность, Вт |
Масса, кг |
|
Посадочный доплеровский радиолокатор1 [4] |
12 км |
0,01...168,00 |
0,002...16,500 |
7,5 ° |
— |
132 |
19,6 |
|
Доплеровский измеритель скорости и дальности2 [6] |
0,5...4 000 м |
0,06...80,05 |
0,050...0,450 |
— |
— |
— |
— |
|
ЛВ-В2 [6] (ЛВ) |
1...60 км |
3,00 |
— |
0,29 мрад |
1 |
— |
— |
|
LIDAR 3 [7] (ЛВ) |
0,05...50,00 км |
1,00 |
— |
1,70 мрад |
1 |
22 |
3,7 |
|
Imaging LIDAR 4 [8] (ЛВ) |
10...5 000 м |
0,02...5,00 |
— |
— |
1 |
60 |
10 |
|
РЛС сближения1 [4] |
25 м…740 км |
25…150 |
0,300 |
— |
— |
160 |
33 |
|
Imaging LIDAR 5 [8] (ЛЛС) |
1...5 000 м |
0,02...1,00 |
— |
— |
1 |
45 |
7 |
Примечание. 1 — использованы в программе «Аполлон» на борту Лунного модуля; 2 — разработаны для КА «Фобос-грунт»; 3 — использовался на борту КА Hayabusa при спуске на астероид Итокава; 4 — вариант, предложенный для управления спуском КА на Луну и Марс; 5 — вариант, предложенный для управления сближением и стыковкой КА вне околоземной орбиты; ЛВ — лазерный высотомер: РЛС — радиолокационные системы.
Как видно из табл. 1, основные характеристики ЛВ и ЛЛС отличаются незначительно. Дополнительно стоит отметить, что особенностью конструкции большинства ЛВ является большой диаметр приемной оптической апертуры (до 0,5 м) и узкая диаграмма расходимости зондирующего пучка. Сравнительные характеристики бортовых ЛВ разных конструкций более подробно представлены в работе [1].
Оценка возможностей использования ЛВ в качестве резервного измерителя при сближении ВПК с ОК на окололунной орбите
Наведение зондирующего пучка ЛВ должно выполняться путем разворота ВПК, выполняемого вручную экипажем по изображению ОК, формируемому телекамерой или оптиковизуальным прибором, аналогично тому, как осуществляется наведение прибора ЛСДК [9].
При использовании в ЛВ узкого зондирующего пучка могут возникнуть сложности при наведении на ОК, который на большой дальности имеет малый видимый угловой размер, т. е. представляет собой так называемый точечный объект.
Особенно трудно навести на точечный объект прибор типа ЛВ-В [6], у которого четыре зондирующих пучка, распределенных в конусе с углом при основании 2° (один пучок в центре и три по краям), каждый из которых имеет расходимость 0,29 мрад. При штатной работе прибора измерения выполняются во всех четырех каналах.
Поэтому при использовании ЛВ для резервирования ЛЛС целесообразно увеличить расходимость зондирующего пучка до 1…6 мрад, а в многоканальной схеме предусмотреть специальный режим работы, когда измерения снимаются только с одного канала.
Средства автономной навигации ВПК обеспечивают точность предварительного выведения 1,5 км, а для надежного перекрытия диапазона измеряемых дальностей ЛВ и коррекции средств автономной навигации максимальная измеряемая дальность принимается равной 5,0...7,0 км (как при использовании ручных лазерных дальномеров на борту КА типа «Союз»).
Дальность измерений ЛВ, предназначенных для управления спуском на поверхность планет, при одинаковой энергии импульса превышает дальности, измеряемые ЛЛС при сближении. Это объясняется тем, что подстилающая поверхность планеты равномерно заполняет все поле зрения приемного канала, и дальность измерений пропорциональна квадратному корню из энергии зондирующего импульса.
Измеряемая ЛВ дальность оценивается по выражению [10]
D =
Еd 2ρτ з пр п пр ,
4qE пор
где Е з — энергия зондирующего импульса; d пр — диаметр входного зрачка приемного объектива; q — отношение сигнал/шум; ρ п — коэффициент отражения подстилающей поверхности планеты (альбедо); Е пор — пороговая энергия принятого сигнала, регистрируемая фотоприемным устройством (ФПУ); τ пр — коэффициент пропускания приемного оптического тракта.
ЛЛС, как правило, осуществляет поиск и обнаружение ОК, когда тот является точечным объектом. Дальность измерений определяется выражением [10]
= 4 Е з S ОК d п 2 р ρ ОК τ пр , (2)
πθ2qE пор где SОК — площадь орбитального корабля; ρОК — коэффициент отражения его поверхности; θ — расходимость зондирующего пучка. В выражении (2) дальность измерений пропорциональна корню четвертой степени из энергии импульса, что следует учесть при энергетической оценке.
При установке на ОК уголковых отражателей (УО) дальность измерений вычисляется с использованием выражения
D =

Е з S УО S пр ρ УО τ пр , qE пор Ω пер Ω отр
где S УО — площадь УО; S пр — площадь приемной апертуры; ρ УО — коэффициент отражения УО; Ωпер — телесный угол распространения зондирующего пучка; Ωотр — телесный угол распространения отраженного от УО пучка.
При сближении пилотируемых КА для защиты органов зрения экипажа необходимо выполнение ограничений, установленных стандартами лазерной безопасности. В качестве источников излучения в большинстве бортовых ЛВ используются твердотельные Nd:YAG -лазеры, излучающие на длине волны λ = 1,06 мкм [1]. Поэтому использование ЛВ при сближении с ОК потребует обеспечения безопасности экипажа от зондирующего излучения.
Согласно ГОСТ 31581-2012 «Лазерная безопасность. Общие требования безопасности при разработке и эксплуатации лазерных изделий», на длине волны λ = 1,06 мкм безопасная энергия зондирующего импульса со стандартными для ЛВ параметрами (2,5…10,0 нс) равна 10 мкДж.
Для энергетической оценки ЛВ примем следующие исходные данные: d пр = 20 см; ρ п = 0,1; τ пр = 0,7; q = 10; Е пор = 10–16 Дж [1]. Дальность измерений в этом случае не будет превышать D = 2,6 км.
Оптимальным решением является переход в рабочий спектральный диапазон λ = 1,5...1,6 мкм, в котором безопасная энергия зондирующего импульса составляет 8 мДж.
Тогда дальность измерений ЛВ достигнет D = 74,8 км.
Теперь проведем энергетическую оценку работы ЛВ по сигналу, диффузно отраженному от корпуса ОК, и по сигналу от УО. Для этого примем следующие допущения:
-
1. ОК имеет площадь отражающей поверхности не менее S ОК = 4,91 м2 (мидель 2,5 м), а его средний коэффициент отражения ρ ОК = 0,5.
-
2. На корпусе ОК со стороны ВПК расположен одиночный УО с диаметром d УО = 2,54 см, точностью изготовления двугранных углов α УО = 10 ″ и коэффициентом отражения ρ УО = 0,85.
В табл. 2 для трех значений расходимости зондирующего пучка θ представлены дальности измерений ЛВ при фиксированном отношении сигнал/шум q = 10 и значения отношения сигнал/шум на фиксированной дальности измерений D = 5 км.
Таблица 2
Дальность измерений и отношение сигнал/шум при работе ЛВ по диффузно отраженному сигналу и сигналу от уголкового отражателя на ОК
|
θ , мрад |
Диффузно отраженный сигнал: S ОК = 4,91 м2; ρ ОК = 0,5 |
Уголковый отражатель: S УО = 5,07 см2; α УО = 10 ″ ; ρ УО = 0,85 |
||
|
Дальность измерений при отношении сигнал/шум q = 10, км |
Отношение сигнал/шум на дальности измерений D = 5 км |
Дальность измерений при отношении сигнал/шум q = 10, км |
Отношение сигнал/шум на дальности измерений D = 5 км |
|
|
1,0 |
20,4 |
2 801 |
338,1 |
2,1·108 |
|
3,5 |
10,9 |
229 |
180,7 |
1,7·107 |
|
6,0 |
8,3 |
78 |
138,0 |
5,8·106 |
Как видно из данных табл. 2, ЛВ обеспечивает дальности измерений по диффузно отраженному сигналу до 20 км и свыше 300 км — по УО. При этом отношение сигнал/шум на дальности D = 5 км составляет от 102 (диффузно отраженный сигнал) до 108 (УО).
В этих случаях выполнение измерений на малых дальностях, особенно при наличии УО, может нарушить работоспособность ЛВ, так как он изначально предназначен для измерений по диффузно отраженному сигналу. Однако в ЛВ иногда предусматривается защита ФПУ от перегрузки мощным отраженным сигналом. Так, при измерении дальностей менее 10 км в ЛВ-В (разрабатывался для КА «Фобос-грунт») автоматически задействуется оптический аттенюатор [6].
Дополнительно, для поддержания уровня принимаемого сигнала в пределах динамического диапазона ФПУ в ЛВ-В используется источник излучения на основе Nd:YAG -лазера, который имеет схему «задающий генератор– усилитель» со ступенчатой регулировкой длительности накачки усилителя от максимальной до полного выключения [11].
Как видно из данных табл. 1, ЛВ имеют минимальную измеряемую дальность в диапазоне 10...1 000 м, так называемую «слепую» или «теневую» зону. Для выполнения мягкой посадки ВПК на высотах меньше «слепой» зоны используются радиационные и радиолокационные доплеровские измерители. Аналогично, на заключительном этапе ручного сближения (менее 200 м) измерения выполняются по видимым угловым размерам элементов конструкции ОК, наблюдаемого экипажем через телекамеру или оптико-визуальный прибор.
Отношение максимальной дальности измерений к «слепой» зоне позволяет определить динамический диапазон приемного канала ЛВ
Примем b = 17,5 см, θ = 1,0 мрад и ω = = 1,5 мрад ( ω задается больше θ для облегчения юстировки). Тогда из выражения (5) получаем 60 м < D < 220 м.
Так как геометрический фактор проявляет-
ся на малых дальностях, а измерения начинаются с дальностей 4,5...5,0 км, защита ФПУ от перегрузки обеспечивается с помощью оптического аттенюатора, как в ЛВ-В.
Рассмотрим сложный случай, когда динамический диапазон ФПУ ограничен значением κ = 103. Тогда максимально допустимый уро-
вень энергии принимаемого сигнала составит Е max = 10–13 Дж. Для оценки примем, что конструкция ОК полностью заполняет поле зрения приемного канала ЛВ.
Тогда из выражения (1) следует, что требуемое ослабление энергии принятого сигнала будет определяться соотношением
ε Е з d п 2 р ρ ОК τ пр ,
1 = 4D2E max
D2
κ =
max
D2
с
где D max — максимальная дальность измерений; D с — протяженность «слепой» зоны. Для образцов ЛВ, перечисленных в табл. 1, динамический диапазон приемного канала, определяемый по выражению (4), составляет 103…106.
Как правило, ЛВ имеет оптическую схему
где Е max — максимально допустимая энергия сигнала, отраженного от пассивного КА, поступающая на ФПУ.
Зависимость величины ослабления оптического аттенюатора, необходимой для защиты ФПУ от перегрузки, от дальности до диффузно отражающего ОК (в диапазоне 0,2...7,0 км), представлена на рис. 1.
с раздельными излучающим и приемным каналами. Тогда с уменьшением дальности измерений наблюдается неполное перекрытие угловых полей излучающего и приемного каналов (геометрический фактор или аппаратная функция). На малых дальностях угловые поля излучающего и приемного каналов совсем не перекрываются, а на больших дальностях происходит полное перекрытие.
За счет геометрического фактора можно снизить перегрузку ФПУ в ближней зоне от мощных отраженных сигналов [9, 12]. Для защиты ФПУ от перегрузки можно увеличить базовое расстояние между оптическими осями приемной и передающей оптических систем [12], однако, в этом случае возрастут габариты ЛВ.
При измерениях по диффузно отраженному сигналу геометрический фактор проявляется в диапазоне дальностей
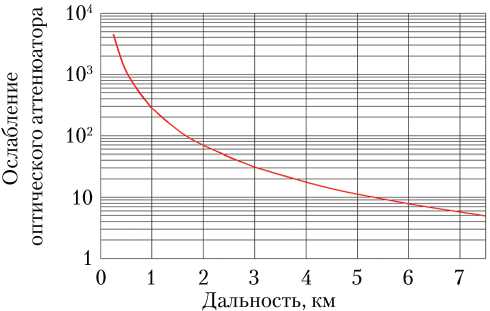
Рис. 1. Зависимость требуемого для защиты фотоприемного устройства ослабления оптического аттенюатора от дальности до орбитального корабля
2 b - d пр „
----- < D <
θ + ω
2 b + d пр
θ + ω
где b — расстояние между оптическими осями приемной и передающей оптических систем ЛВ; ω — поле зрения приемного канала.
Как следует из рис. 1, для защиты ФПУ от перегрузки диффузно отраженным сигналом ослабление оптического аттенюатора должно быть около 104.
Далее рассмотрим прием сигнала, отраженного от УО, который установлен на ОК. При использовании УО геометрический фактор проявляется в диапазоне дальностей
b – 2пр – dУО b + 2пр – dУО
< D <
α УО α УО
.
На малых дальностях происходит «отсечка» отраженного от УО сигнала за счет параллакса оптических осей приемного и передающего каналов ЛВ: отраженный от УО пучок излучения направляется обратно в излучающую апертуру и из-за малой расходимости не попадает в приемную апертуру. В результате на расстоянии менее дальности «отсечки» измерения могут выполняться только по диффузно отраженному сигналу.
При b = 17,5 см, d УО = 2,54 см и α УО = 10 ″ по формуле (7) получим диапазон дальностей 1 023 м < D < 5 148 м.
В этом случае, геометрический фактор, определяемый в соответствии с методикой, описанной в работе [9], позволяет дополнительно ослабить мощность отраженного от УО сигнала при сближении с ОК.
Преобразуя выражение (3) аналогично (6), получаем, что ослабление энергии принятого сигнала составит
ΘЕ S S ρ τ ε = з УО пр УО пр , 2 = D4Ω Ω E пер отр max
где Θ — коэффициент перекрытия угловых полей излучающего и приемного каналов, определяемый геометрическим фактором.
Зависимость величины ослабления оптического аттенюатора, рассчитанная по формуле
(8), от дальности до УО (в диапазоне 1...7 км,
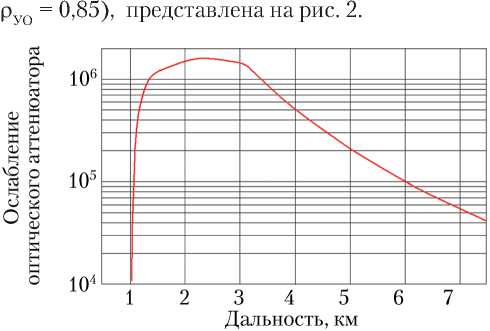
Рис. 2. Зависимость требуемого для защиты фотоприемного устройства ослабления оптического аттенюатора от дальности до уголкового отражателя
Как видно из рис. 2, требуемое ослабление оптического аттенюатора составляет более 106. На дальностях менее 1,6 км уже сильно проявляется влияние геометрического фактора, что позволяет уменьшить ослабление оптического аттенюатора.
Для выполнения безопасного для ФПУ многократного поиска ОК можно использовать следующий алгоритм функционирования приемного канала. После включения ЛВ оптический аттенюатор переводится в положение «полностью закрыт», и только после этого осуществляется наведение на ОК и его зондирование. Если сигнал на выходе ФПУ отсутствует, ослабление аттенюатора уменьшается на один шаг, и зондирование повторяется до обнаружения сигнала или до перевода аттенюатора в положение «полностью открыт». По уровню устойчиво принимаемого сигнала на выходе ФПУ выставляется требуемое ослабление оптического аттенюатора. Этот алгоритм позволяет избежать внезапной перегрузки ФПУ при повторном поиске ОК на малых дальностях.
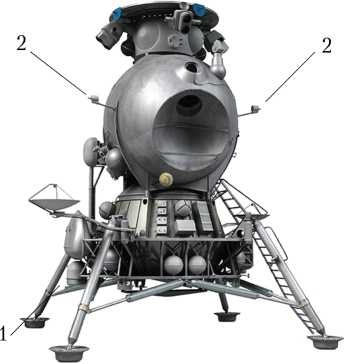
При резервировании следует принимать во внимание взаимное расположение ЛВ и ЛЛС. При размещении ЛВ и ЛЛС на борту ВПК их поля зрения могут быть направлены в противоположных направлениях, как это было сделано для аналогичных радиосредств в ранее известных конструкциях. На рис. 3 показано расположение радиосредств для управления спуском и сближением Лунного модуля (программа «Аполлон») и Лунного корабля (комплекс «Н1-Л3»).

а)
б)
Рис. 3. Расположение радиосредств для управления спуском и сближением на лунных взлетно-посадочных комплексах: а — Лунный модуль (программа «Аполлон»); б — Лунный корабль (комплекс «Н1-Л3»); 1 — посадочный радиолокатор; 2 — антенны радиолокационных систем сближения
Эта проблема принципиально разрешима. Во время штатного сближения с орбитальными станциями транспортные КА несколько раз выполняют развороты по тангажу на 180 ° для выдачи тормозных импульсов, во время которых возникает перерыв в измерениях РЛС сближения.
Также, при первом применении экипажем ручного лазерного дальномера ЛПР-1 на борту КА «Союз-Т13» в 1985 г. во время экспедиции по восстановлению работоспособности потерявшей управление орбитальной станции «Салют-7», он был установлен на боковом иллюминаторе в бытовом отсеке. Таким образом, сближение выполнялось, когда активный космический аппарат был развернут к орбитальной станции боком [13].
Принципиально — чтобы ЛВ после старта мог использоваться для измерений, он не должен размещаться на посадочной ступени ВПК. Но при штатном старте с лунной поверхности ЛВ должен оставаться на посадочной ступени ВПК для уменьшения массы его стартовой ступени, что позволяет взять на борт больше полезного груза.
Возможное решение заключается в том, что в случае отказа ЛЛС перед стартом ВПК с Луны экипаж устанавливает ЛВ на взлетную ступень. Если неисправная ЛЛС была установлена на взлетной ступени ВПК, она демонтируется экипажем, и ЛВ занимает ее место. Тогда конструкции ЛЛС и ЛВ должны допускать выполнение этой операции.
В таком случае следует обеспечить возможности для совместной юстировки ЛВ с телекамерами или оптико-визуальными приборами, которые будут использоваться для его наведения на ОК.
Результаты исследований и их обсуждение
При возвращении с Луны пилотируемых экспедиций на первое место выходит безопасность экипажа и связанные с ней требования надежности. Критическими операциями являются сближение и стыковка ВПК с ОК. ЛЛС, используемая для управления сближением и стыковкой, должна обладать максимальной надежностью.
Так как обеспечить резервирование ЛЛС достаточно сложно, то в случае ее отказа предлагается использовать при сближении ЛВ, штатно применяемый для управления спуском на лунную поверхность, который должен быть установлен на взлетной ступени ВПК.
Выполненные оценки показывают принципиальную возможность использования ЛВ для измерений дальности и скорости продольного относительного движения при ручном управлении сближением ВПК с ОК на окололунной орбите.
ЛВ с излучением, безопасным для органов зрения экипажа (рабочий спектральный диапазон
1,5...1,6 мкм), позволяет измерять дальности до подстилающей поверхности до 75 км. При ручном управлении сближением ЛВ может быть использован для измерений на дальностях до 5 км. Для облегчения наведения ЛВ на ОК предлагается увеличить расходимость зондирующего пучка до 1…6 мрад.
Отношение сигнал/шум на дальности D = = 5 км составляет 102...108, поэтому в приемном канале ЛВ необходимо использовать оптический аттенюатор для защиты ФПУ от перегрузки мощным отраженным сигналом. Получены требуемые значения ослабления оптического аттенюатора, необходимые для выполнения измерений по диффузно отраженному сигналу и по одиночному УО в диапазоне дальностей 0,2...7,0 км.
Список литературы Применение лазерного высотомера в качестве резервного измерителя при сближении космических аппаратов на окололунной орбите
- Старовойтов Е.И., Савчук Д.В., Зубов Н.Е. Анализ возможностей, оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты//Космическая техника и технологии. 2014. № 1(4). С. 67-74.
- Старовойтов Е.И., Савчук Д.В., Зубов Н.Е. Оптимизация массы и энергопотребления лазерных локационных систем для управления сближением и стыковкой космических аппаратов//Космическая техника и технологии. 2014. № 3(6). С. 39-42.
- Старовойтов Е.И. Анализ надежности лазерных локационных систем для управления движением космических аппаратов//Наука и образование (МГТУ им. Н.Э. Баумана). 2014. № 2. Электронное научно-техническое издание. Режим доступа: doc/699720.html' TARGET='_new'>http://technomag.bmstu.ru/>doc/699720.html (дата обращения 23.11.2014 г.).
- Гончаревский В.С. Радиоуправление сближением космических аппаратов. М.: Советское радио, 1976. 240 с.
- Микрин Е.А., Михайлов М.В., Рожков С.Н. Автономная навигация и сближение КА на окололунной орбите//XVII Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург, 2010. С. 288-298. 6.
- Фобос Грунт: проект космической экспедиции. Т. 1. М.: ООО «Полстар», 2011. 237 с.
- Mizuno T., Tsuno K., Okumura E., Nakayama M. IDAR in HAYABUSA Mission. Режим доступа: 2451 (дата обращения 14.10.2014 г.). 8.
- Pereira do Carmo J., Moebius B., Pfennigbauer M. Imaging LiDARs for Space Applications//Proc. of SPIE Vol. 706170610 J-1. Режим доступа: irp/2008_doCarmo_Img_LIDAR_Space_Apps.pdf' TARGET='_new'>http://www.sensl.com/downloads/>irp/2008_doCarmo_Img_LIDAR_Space_Apps.pdf (дата обращения 14.01.2012 г.).
- Старовойтов Е.И., Зубов Н.Е., Ивашов В.В., Никульчин А.В. Исследование эффективности и оптимизация параметров лазерного локационного прибора для измерения скорости сближения космических аппаратов//Наука и образование (МГТУ им. Н.Э. Баумана). 2014. № 6. Электронное научно-техническое издание. Режим доступа: doc/712240.html' TARGET='_new'>http://technomag.bmstu.ru/>doc/712240.html (дата обращения 14.10.2014 г.).
- Назаров В.Н., Балашов И.Ф. Энергетическая оценка импульсных лазерных дальномеров. СПбГУИТМО, 2002. 38 с. Режим доступа: http://de.ifmo.ru/bk_netra/start.php?bn=27> (дата обращения 19.01.2012 г.).
- Поляков В.М., Покровский В.П., Сомс Л.Н. Лазерный передающий модуль с переключаемой диаграммой направленности для дальномера космического аппарата//Оптический журнал. 2011. Т. 78. № 10. С. 4-9.
- Вильнер В.Г., Волобуев В.Г., Ларюшин А.И., Рябокуль А.С. Достоверность измерений импульсного лазерного дальномера//Фотоника. 2013. № 3. С. 42-60.
- Костин А.Н. Эргономическая история спасения орбитальной станции «Салют-7»//Эргономист. 2013. № 27. С. 18-22.
