Применение марковских процессов при техническом обслуживании и ремонте летательных аппаратов с учетом критерия коррозионной стойкости

Автор: Кацура Александр Владимирович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 3 (36), 2011 года.
Бесплатный доступ
Обобщение информации по техническому состоянию длительно эксплуатируемых летательных аппаратов и анализ отказов свидетельствуют о том, что очень важным является учет факторов коррозионной стойкости конструкции.
Коррозионное поражение, прочность, коррозионно-усталостная долговечность
Короткий адрес: https://sciup.org/148176582
IDR: 148176582 | УДК: 629.7.017.1
Use of methods of nondestructive test for exposure of corrosion damage of the airframe structure with account of corrosive damage criteria
From the analysis of the tasks caused by the necessity to mitigate and prevent the effects of corrosion during a scheduled service, the most important one is to define the limits of corrosion damage.
Текст научной статьи Применение марковских процессов при техническом обслуживании и ремонте летательных аппаратов с учетом критерия коррозионной стойкости
Сложные технические системы могут быть классифицированы в виде трех состояний:
-
1) новая конструкция – обозначим это состояние как 0;
-
2) зачищенная от коррозии конструкция – это состояние 1;
-
3) замененная конструкция – обозначим как 2.
Не все указанные здесь состояния связаны с переходом друг в друга. Совершенно очевидно, что зачищенная конструкция уже не может возвратиться в состояние «новая». Зачистка производится в местах видимой коррозии, но остается еще много мест, где коррозия не видима, но уже имеет место [1].
Невозможен переход из состояния 2 в состояние 0. Это связано с тем, что замена обшивки сопровождается заменой конструктивных элементов. Кроме того, обшивка панели может быть заменена не целиком, а только частично, в местах обнаруженных коррозионных поражений.
Таким образом, схема переходов из одного состояния в другое, в общем случае, представлена на рис. 1.
Рис. 1. Схема переходов
При подсчете вероятностей переходов было учтено, что конструкция может переходить из состояния 1 в состояние 1, т. е. оставаться в состоянии 1, если производится повторная зачистка, а может переходить из состояния 2 в состояние 2, если повторная замена производится без фиксации состояния 1.
Соответственно имеет место следующая матрица переходов и переходных вероятностей (указаны в скобках):
|
Было Стало |
0 |
1 |
2 |
|
0 |
00 ( Р 00 ) |
01 ( Р 01 ) |
02 ( Р 02 ) |
|
1 |
10 ( Р 10 ) |
11 ( Р 11 ) |
12 ( Р 12 ) |
|
2 |
20 ( Р 20 ) |
21 ( Р 21 ) |
22 ( Р 22 ) |
Вероятность перехода Р 00 означает вероятность того, что на предыдущем ремонте конструкция находилась в состоянии «новая» и при поступлении в очередной ремонт она также не нуждается в зачистке или замене.
Вероятность перехода Р 01 означает вероятность того, что на предыдущем ремонте конструкция наводилась в состояние «новая», а на следующем ремонте требует зачистки. Вероятность Р 02 означает вероятность того, что на предыдущем ремонте конструкция находилась в состоянии «новая» и требует замены на следующем ремонте (без промежуточной зачистки).
Вероятность Р 11 означает вероятность того, что на предыдущем ремонте конструкция была зачищена и при поступлении в очередной ремонт вновь требует зачистки.
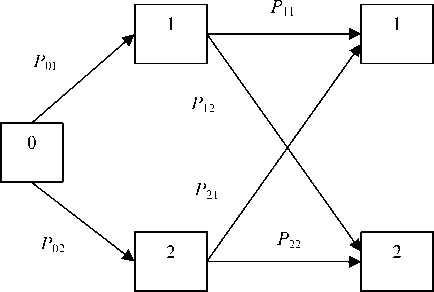
Рис. 2. Иллюстрация схемы переходов из одного состояния в другое
Аналогично: Р 12 – означает вероятность перехода из состояния 1 в состояние 2; Р 21 – вероятность перепада из состояния 2 в состояние 1 и Р 22 – вероятность перехода из состояния 2 в состояние 2.
Указанные матрицы представляли бы однородную цепь Маркова, если бы переходные вероятности Р ij зависели только от предыдущего состояния. При этом исчисления наработки панели надо было бы вести от предыдущего состояния к последующему. Пусть, например, наработка с начала эксплуатации при состоянии 2 есть Т 2, и состояние 2 перешло в состояние 1. Пусть наработка с начала эксплуатации в состоянии 1 есть T 21 , тогда наработка при переходе 2–1 составит
( T 2i — Т 2). Такой подход был бы правильным, если замена или зачистка полностью охватывала бы рассматриваемую зону, или если бы при дальнейшей дефектации координаты коррозии жестко фиксировались и лежали в области замены или зачистки.
На самом деле это не так. Зачистка выполняется лишь в местах появления коррозии и остается еще много площадок с необнаруженной коррозией. При дальнейшей дефектации коррозия может быть обнаружена вне зоны зачистки и нет возможности строго зафиксировать ее координаты, сказанное относится и к процессу замены (состояние 2). Это означает, что, например, переход 2-1 зависит не только от предыдущего состояния 2, но и от наработки самолета с начала эксплуатации. Здесь надо добавить, что не-обнаружение коррозии не означает ее полного отсутствия, а длительность эксплуатации оказывает существенное влияние на зачаточные коррозионные повреждения.
Сведение немарковских параметров системы к марковским. С теоретической точки зрения любой случайный процесс можно представить как процесс Маркова: для этого достаточно в понятие «состояние» включить всю предысторию поведения системы. Следовательно, о возможности аппроксимации Маркова необходимо судить с 2-х позиций: насколько точно модели Маркова отражают реальный характер случайных процессов и насколько сложны сами модели. Аппроксимация Маркова возможна, если потоки возникновения и устранения отказов и неисправностей являются простейшими, т. е. удовлетворяются условия ординарности и стационарности. Для определения вероятностей состояний P i возможна замена реальных функций распределения F i ( t ), характеризующих потоки, переводящие системы ЛА из одного состояния в другое, на экспоненциальные при условии равенства их первых моментов [2]. В некоторых случаях, вместо замены реальных законов распределения экспоненциальными путем приравнивания их математических ожиданий, можно использовать способ введения фиктивных состояний и представлений исследуемых процессов как кусочно-однородных. Зная характер изменения интенсивности потоков отказов, можно для каждого периода принять их постоянными to 1s ю 2 и ю 3 (что соответствует замене монотонно изменяющихся функций ступенчатыми) и решить ряд независимых задач для каждого периода. Но в этом случае возникает необходимость нахождения значений юь ю 2, ю 3 и длительности периодов Т 1 и Т 3 по имеющимся статистическим данным. В соответствии со сказанным, вероятность перехода Р у следует рассматривать как функцию Р у ( Т) от наработки Т с начала эксплуатации.
Фактически речь идет об условной вероятности переходов, при условии, что известна наработка с начала эксплуатации. В нашем случае производится замена вероятностных переходов Р 01 и Р 12( Р 21) на кусочно-однородные процессы: Р 01 - необслуживаемая нерезервируемая система, Р 12( Р 21) - как непрерывно контролируемая нерезервируемая система [3].
Модель состояний необслуживаемых нерезервированных конструктивных элементов (КЭ) летательных аппаратов (ЛА). Для необслуживаемых нерезервированных КЭ ЛА характерными состояниями являются: 1 - готовность к работе (Г); 2 - отказа (О).
В связи с невозможностью выявления и устранения возникших в процессе эксплуатации отказов будет иметь место лишь одно направление перехода: из состояния 1 в состояние 2 (1-2). Ориентированный граф состояний таких КЭ представлен на рис. 3.
Состояние 2 является поглощающим, и поведение этих КЭ описывается следующей системой дифференциальных уравнений:
dP1( t ) dt
= - a 12 P ( t )
dP 2 ( t ) dt
= a 12 P ( t )-
Интенсивность перехода a 12 по своей физической сущности представляет собой интенсивность отказов X необслуживаемого КЭ:
a 12 = X .
Используя преобразование Лапласа, от системы дифференциальных уравнений (2) перейдем к системе алгебраических уравнений:
SP 1 ( S ) - P 1 (0) = - X Р 1 ( S );
SP 2 ( S ) - P 2 (0) = X P 1 ( S ).
Из данной системы найдем выражение для P 1( S ):
P 1 ( S ) =
P 1 (0)
S + X .
Перейдя к оригиналу, окончательно получим
P 1 ( t ) = P 1 (0) e "X t . (3)
1 2
Рис. 3. График состояний необслуживаемых нерезервированных КЭ ЛА
В модели необслуживаемых КЭ (рис. 3) переменной является интенсивность отказов X . Значение вероятности P 1(0) принимается равным оценке, полученной теоретическим путем или при заводских испытаниях. Характер изменения вероятности P 1 застать КЭ в состоянии готовности к работе показан на графиках (рис. 4), построенных по исходным данным, приведенным в табл. 1 (значение P 1(0) принято равным единице, что, как правило, имеет место при теоретических расчетах и является явно завышенной оценкой).
Из этих графиков видно, что даже при малых, трудно достижимых значениях X = 10-6 1/ч вероятность P1 готовности необслуживаемого КЭ к работе уже после одного года эксплуатации снижается до недопустимо малых значений (Р1(Т = 8 760 л. ч.) = = 0,9913). Это указывает на необходимость тщательной обработки статистических данных для оценки по результатам испытаний необслуживаемых КЭ с целью подтверждения правильности принятого главным конструктором решения о его необслуживаемости в процессе эксплуатации.
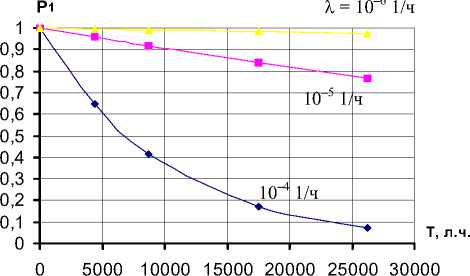
Рис. 4. Зависимость вероятности P 1 , перехода Р (01) от времени эксплуатации
Таблица 1
Вероятность P 1 нахождения КЭ в состоянии готовности к применению
|
X , 1/ч |
Т , л. ч. |
|||
|
4 380 |
8760 |
17 520 |
26279 |
|
|
10-4 |
0,6453 |
0,4164 |
0,1734 |
0,072 |
|
10-5 |
0,9571 |
0,9161 |
0,8393 |
0,7689 |
|
10-6 |
0,9956 |
0,9913 |
0,9826 |
0,9741 |
Модель состояний непрерывно контролируемых нерезервированных конструктивных элементов летательных аппаратов. Для непрерывно контролируемых в процессе эксплуатации нерезервированных КЭ ЛА модель системы ТО имеет простейший вид (рис. 5). В любой произвольный момент времени такие КЭ могут находиться в одном из двух состояний: 1 - готовности к работе (Г); 2 - отказа (О).
Наличие непрерывного контроля технического состояния КЭ позволяет в случае возникновения отказа (переход 1-2) немедленно приступить к восстановлению его готовности (переход 2-1).
Рис. 5. График состояний непрерывно контролируемых нерезервированных КЭ ЛА
Система дифференциальных уравнений для представленной на рис. 5 модели будет иметь следующий вид:
dP i ^t)- = — a i2 p i ( t ) + a 2i p 2 ( t ); (4)
dt
-
2 ( t ) = - a P, ( t ) + a P, ( t ). 212 121
dt
Используя преобразование Лапласа, перейдем от системы дифференциальных уравнений (4) к системе алгебраических уравнений, что позволит получить выражение для вероятности P 1( t ) нахождения КЭ в состоянии 1 готовности к работе (при начальном условии P 1(0) = 1):
P ( t ) =
a 21
a 12 + a 21
+ a12 . e-(a12 + a21) t = a12 + a 21
Ц + ™ нп . e - ( ™ нп + ц ) t ϖ нп +µ ϖ нп +µ
где а 12 = ет нп; а 21 = 1/ Т нпустр = ц ; ет нп - параметр потока отказов непрерывно контролируемых нерезервированных КЭ; Т нпустр - среднее время устранения отказов; ц - интенсивность восстановления.
В стационарном режиме эксплуатации ( t ^ » ) система уравнений (4) вырождается в систему алгебраических уравнений
-
- a 12 P 1 + a 21 P 2 = 0; (6) а 12 Р 1 - а 21 Р 2 = 0,
из которой с учетом нормировочного условия P 1 + Р 2 = 1 получаем
Р 1 =—^. (17) ϖ нп +µ
Выражения (5) и (7) широко известны из литературы по теории надежности и эксплуатации [4]. Но при этом модели Маркова позволяют получить еще целый ряд показателей качества систем ТО ( F i , p ij , ц i и др.).
В модели непрерывно контролируемых нерезервированных КЭ и систем ЛА вектор эксплуатационных характеристик х включает две характеристики: ю нп и Т *пустр (или ц ). Графики изменения вероятности P 1 готовности КЭ к работе приведены на рис. 6, они построены по исходным данным табл. 2. Из них видно, что при ю нп < 10-5 1/ч вероятность P 1 практически не зависит от времени устранения отказов в реальном диапазоне их изменения [5].
Таблица 2
Вероятность P1 нахождения КЭ в состоянии готовности к применению
|
Т нпустр , ч |
® , l/ч |
||
|
10-3 |
10-4 |
10-5 |
|
|
10 |
0,9901 |
0,9990 |
0,9999 |
|
25 |
0,9756 |
0,9975 |
0,9998 |
|
50 |
0,9524 |
0,9950 |
0,9995 |
|
100 |
0,9091 |
0,9901 |
0,9990 |
Так, при изменении Т“пустр на 90 % (с 10 до 100 ч) вероятность P1 изменяется всего лишь на 0,09 %. Однако при юнп > 10-5 1/ч картина меняется: изменение Тнпустр на 90 % при юнп = 10-4 1/ч приводит к изменению P1 на 0,9 %, а при юнп = 10-3 1/ч - на 8 %. Следовательно, в ходе проведения испытаний исходя из достигнутого уровня юнп требования к точности нахождения оценки времени Тнпустр и, следовательно, числу испытаний должны быть различны для значений ωнп ≤ 10–5 1/ч и ωнп ≥ 10–5 1/ч.
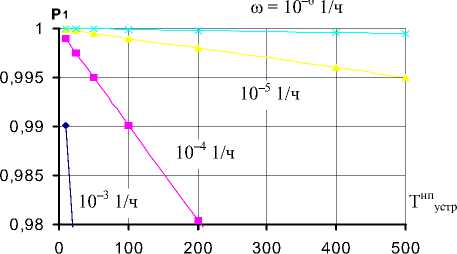
Рис. 6. Зависимость вероятности Р 1 , перехода Р 12 , от времени устранения отказов
Таким образом, создание матрицы вероятностей переходов из одного состояния в другое позволяет осуществлять прогнозирование развития коррозионных поражений и оценивать минимальный, средний, максимальный объем работ и расход материальных ресурсов, связанных с устранением коррозии при поступлении ЛА в ремонт.
Сведение немарковских параметров системы к Марковским и представление исследуемых процессов как кусочно-однородных позволило провести оценку вероятности P 1 нахождения систем панелей обшивки фюзеляжа в состоянии готовности к применению по назначенному техническому обслуживанию и определить вероятность работоспособности конструктивных элементов для самолетов типа Ан-24 .
