Применение медианных фильтров с взвешенным центральным элементом для очистки изображений от импульсного шума

Автор: Червяков Николай Иванович, Ляхов Павел Алексеевич, Оразаев Анзор Русланович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Теоретические основы технологий передачи и обработки информации и сигналов
Статья в выпуске: 4 т.15, 2017 года.
Бесплатный доступ
В статье показано применение медианных фильтров с взвешенными центральными элементами для очистки изображений от импульсного шума. Показано влияние вероятности получения неискаженных пикселей и искажения функции распределения пикселей изображения на результат обработки. Продемонстрировано, что медианные фильтры с окном 3x3 позволяют получать более высокое качество очистки изображений от шума с небольшой вероятностью импульсного шума, а медианные фильтры с размерами окон 5х5 и 7х7 позволяют получать более высокое качество очистки изображений от шума с высокой вероятностью импульсного шума. Полученный результат может быть использован в медицинской обработке изображений и адаптивных системах фильтрации при обработке фото- и видеоданных.
Цифровая обработка изображений, импульсный шум, медианный фильтр, цифровая обработка сигналов
Короткий адрес: https://sciup.org/140256161
IDR: 140256161 | УДК: 621.391 | DOI: 10.18469/ikt.2017.15.4.03
Removal of impulse noise from image using median filters with weighted central element
This paper shows the use of median filters with weighted central elements for removing the impulse noise from the image. The influence of the probability of obtaining undistorted pixels and distortion of the image pixel distribution function on the processing result is shown. It is demonstrated that median filters with a 3x3 window allow to obtain a higher quality of image denoising at low probability of impulse noise, and median filters with window sizes of 5x5 and 7x7 allow to obtain a higher quality of image denoising at high probability of impulse noise. The obtained results can be used in medical image processing and adaptive filtering systems for photo and video data processing.
Текст научной статьи Применение медианных фильтров с взвешенным центральным элементом для очистки изображений от импульсного шума
В процессе передачи и преобразования посредством радиотехнических систем изображения подвергаются воздействию различных помех, что в ряде случаев приводит к ухудшению визуального качества и потере участков изображений. С широким внедрением цифровых систем связи увеличивается актуальность решения задач восстановления изображений, полученных с по- мощью фото- и видеокамер, с целью фильтрации изображений. На практике часто встречаются изображения, искаженные шумом, который появляется на этапах формирования и передачи его по каналу связи [1]. Линейные алгоритмы фильтрации применяются для реставрации и улучшения визуального качества изображений. Их можно применять для снижения уровня шума на изображениях. Однако, чтобы подавить шум и при этом сохранить контурную часть изображений, приходится применять нелинейные фильтры [2].
Все линейные алгоритмы фильтрации приводят к сглаживанию резких перепадов яркости изображений, прошедших обработку. Недостаток в том, что линейные процедуры являются оптимальными при гауссовском распределении сигналов, помех и наблюдаемых данных. Реальные изображения не подчиняются данному распределению вероятностей. Одна из основных причин этого состоит в наличии у изображений разнообразных границ, перепадов яркости, переходов от одной текстуры к другой. Поддаваясь локальному гауссовскому описанию в пределах ограниченных участков, многие реальные изображения в этой связи плохо представляются как глобально гауссовские объекты. Именно это и служит причиной плохой передачи границ при линейной фильтрации. Вторая особенность линейной фильтрации – ее оптимальность, как только что упоминалось, при гауссовском характере помех. Обычно этому условию отвечают шумовые помехи на изображениях, поэтому при их подавлении линейные алгоритмы имеют высокие показатели.
Однако часто приходится иметь дело с изображениями, искаженными помехами других типов. Одной из них является импульсный шум. При ее воздействии на изображении наблюдаются белые и черные точки, хаотически разбросанные по кадру [3]. Применение линейной фильтрации в этом случае неэффективно – так как каждый из входных импульсов дает отклик в виде импульсной характеристики фильтра, а их совокупность способствует распространению помехи на всю площадь кадра.
Удачным решением перечисленных проблем является применение медианной фильтрации, разработанной в [4]. Медианная фильтрация применяется в обработке инфракрасных изображений [5], изображений, сделанных под водой [6], а также в медицине: при очистке рентгеновских снимков от шума [7], снимков, полученных с помощью магнитно-резонансной томографии [8] и снимков сетчатки глаза [9]. Кроме того, медианные фильтры (МФ) находят применение в системах адаптивной фильтрации изображений [10].
Медианный фильтр может быть спроектирован так, чтобы наилучшим образом удалить шум, но МФ с взвешенным центральным элементом (ВЦЭ) дает аналогичные результаты, и путем выбора веса центрального элемента фильтра пользователь может получить желаемый уровень сглаживания [11].
Поскольку центральный вес уменьшается для достижения желаемого уровня подавления импульса, выходное изображение будет испытывать повышенные искажения, особенно вокруг мелких деталей изображения. Тем не менее применение МФ с ВЦЭ может быть очень эффективным в устранении шума «соль и перец», сохраняя при этом детали изображения [12].
В этой статье мы покажем зависимость качества восстановления изображения, искаженного импульсным шумом, от его интенсивности и веса МФ с ВЦЭ.
Будем считать, что цифровые изображения представляются набором чисел на квадратной решетке {.Yy j } ’ где и,й изменяются по z2 или по некоторому подмножеству Z2, где z – это множество целых чисел.
Рассмотрим простой МФ, в котором фильтрация осуществляется посредством движения окна некоторой маски вдоль последовательности дискретных отсчетов и замены значения в центре маски медианой исходных отсчетов внутри маски. Обозначим как W<)} И {У(у)} входной и выходной компоненты МФ соответственно, тогда
Жй =
4 .X 7 2 (1)
= median{X(i-s,j-Й | (s,0 e PT,(i,j) e Z"), где W – «окно» (далее без кавычек), которое определяется в окрестности начала координат. Например, для (2L + l)x(2Z + l) квадратное окно задается как W = sv(sA\-L
Рассмотрим простой МФ с весами
< h(s, ^) | (5, t) g W, ^^h(s,t)-c >, _ Vs,iW ,
где c – нечетное целое, большее или равное размеру окна. При получении выходных данных У(/, /) данный МФ генерирует h(s,t) копии ХЦ-sJ-t) для каждого (s,t)eW, всего c выборок значений. Затем берется медианное значение c -выборок. Таким образом, Y(i,j) представляется в виде
ЖЛ =
= median{h(s,t)OX(i — s,j — 0 | ($,0 e Wy (3)
При применении МФ происходит последовательная обработка каждой точки кадра, в результате чего образуется последовательность оценок. В принципе, для каждого отсчета выполняется независимая оценка медианы в окне. В целях ускорения оценки целесообразно алгоритмически на каждом шаге использовать ранее выполненные вычисления. Отсчеты изображения, оказавшиеся в пределах окна, образуют рабочую выборку текущего отсчета.
Чтобы выполнить данную фильтрацию для элемента изображения, необходимо сначала упорядочить по возрастанию значения пикселей внутри окрестности, затем найти значение медианы и, наконец, присвоить полученное значение обрабатываемому элементу. Так, для окрестности 3x3 элементов медианой будет пято е значение по величине, для окрестности 5x5 – тринадцатое значение, и так далее [13].
Например, пусть в окрестности 3x3 элементы имеют следующие значения: {90,150, 83,163, 255,132,72,142,173}, где элемент 255 соответствует центру окна. Большое значение ярко сти в этой точке кадра является результатом воздействия импульсного шума. Упорядоченная по убыванию выборка имеет вид: {72, 83, 90,132,142,150,163,173, 255}, следовательно в соответствии с процедурой на выходе МФ получаем значение 142.
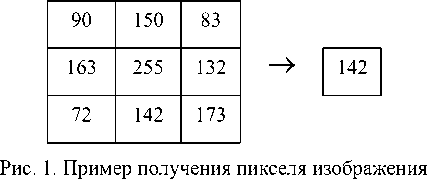
после применения медианного фильтра с окном 3x3
Простой МФ с центральным весом //(0,0) = 2^ + 1 и h{s,t) = 1 для каждого (^,0*(0,0) называется МФ с взвешенным центральным элементом (ВЦЭ), где к - неотрицательное целое число. Выход Y(i,j) МФ с ВЦЭ задается выражением
Y (i, 7) = median ^X (i — s,j — ty 2K0X(i,j)\(S,t)eWy
где вертикальный «ромбик» означает, что в массиве, который необходимо отсортировать, необ- ходимо использовать элемент ху, й не один раз, а взять его 2K копий [12]. Если K=0, то МФ с ВЦЭ становится простым медианным фильтром, а когда 2^ + 1 больше или равен размеру окна 2£ + l, он становится тождественным фильтром, не изменяющим сигнал.
Утверждение [11]. Для независимых и одинаково распределенных входов функция распределения выходного сигнала FY МФ с ВЦЭ с размером 2£ + l и центральным весом 2 K + 1 задается выражением
2/.
FY=^CyFry-FxfL-J +
2L (5)
^CyF^-FxyL+'"J , где kv=L + ;-K , k,=L + l + K ,FX – входное распределение и c* = – биномиальные коэффициенты. Далее мы рассмотрим подавление шума при помощи МФ с ВЦЭ с масками 3x3, 5x5 и 7x7.
Под импульсным шумом понимаем искажение сигнала импульсами, то есть выбросами с очень большими положительными или отрицательными значениями и малой длительностью. При обработке изображений импульсный шум возникает, например, вследствие ошибок декодирования, которые приводят к появлению черных и белых точек на изображении. Поэтому его часто называют точечным шумом. Выбросы шума особенно заметны на очень темных или очень светлых участках изображений. Для таких участков можно вывести формулы для вероятности правильного воспроизведения [14].
Появление выброса шума в каждой точке (6 j) изображения имеет вероятность
p
и не зависит ни от наличия шума в других точках изображения, ни от исходного изображения. Искаженная точка приобретает стабильное значение
d
, соответствующее черному или белому цвету. Пусть
sxX
^S(i,j) с вероятностью (1-/?);
^(б7) = (6)
{« с вероятностью р, где №7)}" значения неискаженного изображения. Пусть N равно максимально возможному значению пикселя изображения: например, для 8-битных изображений в оттенках серого N = 255. При допущении о том, что при импульсном шуме появление белых или черных пикселей равновероятно, модель импульсного шума может быть переписана в виде:
Рг{ЖУ) = 0} = , Рг{Жу) -N^^-,
(7) рг№п-8а,п^\-р.
где Рг{Л} – вероятность появления события Л.
При рассмотрении МФ с размером окна 2L + 1 и весом центрального элемента 2^ + 1 поиск медианы при вычислении результата работы фильтра осуществляется по массиву, состоящему из 2L + 2K + 1 элементов.
Если центральный пиксель части изображения, к которой применен МФ с ВЦЭ, имеет минимально возможное значение 0, то для того, чтобы результатом работы фильтра был 0, необходимо и достаточно, чтобы среди оставшихся 2L пикселей части изображения не менее (2L-2K-1V2 пикселей имели значения 0. Поскольку количество пикселей является целым числом, то это требование можно заменить на требование равенства 0 не менее L-K пикселей части изображения.
Если центральный пиксель части изображения, к которой применен МФ с ВЦЭ, имеет значение, отличное от 0, то для того, чтобы результатом работы фильтра был 0, необходимо и достаточно, чтобы среди оставшихся 2L пикселей части изображения не менее (2£ + 2^ + 1)/2 пикселей имели значения 0. Поскольку количество пикселей является целым числом, то это требование можно заменить на требование равенства 0 не менее £ + ^ + 1 пикселей части изображения.
Таким образом, вероятность получения 0 в качестве результата работы МФ с ВЦЭ равна
2L / \V рк№п=т=^ q[Wi-^ + i=L-K \ ^ У \ 7
С учетом (8)-(9) можно найти вероятности получения «искаженного» результата работы МФ с ВЦЭ, соответствующего получению 0 или N на выходе фильтра, и «неискаженного» результата работы МФ с ВЦЭ, соответствующего получению значений, отличных от 0 или N на выходе фильтра:
Рг{У(/, У) -«искажен»} =
+ (2-/?) ^ c;/^Ki-^ i=L+K+\ V V .
Рг{У(/,У) — «не искажен»} =
-\-p^Lc\l i=L-K
-(2-р) У C}J^ 1-^
i=L+K+1 V \ .
В таблицах 1-3 приведены значения вероятностей получения неискаженных пикселей изображения, рассчитанные по формуле (11) для медианных фильтров с размерами масок 3x3, 5x5 и 7х7, с различными весами центральных элементов для значений вероятности р = 0,01; 0,05; ОД; 0,25; 0,5.
Из таблиц 1-3 видно, что во всех случаях вероятность получения неискаженного пикселя изображения уменьшается с ростом коэффициента К.
p/f№V) = o) = y £ c;/yKi-y) + i=L-K V 7 V ^7
С учетом допущения равной вероятности появления черных и белых пикселей при импульсном шуме можно записать аналогичную формулу для вероятности получения N в качестве результата работы МФ с ВЦЭ:
Для оценки структурного изменения изображения после применения МФ с ВЦЭ предположим, что пиксели изображения подчиняются равномерному закону распределения с функцией распределения
Fx^ =
О,
если л- < 0;
—, если 0 < х < N; N
если х >
где А" – уровень яркости пикселя изображения.
Таблица 1. Вероятность получения неискаженного пикселя изображения, искаженного импульсным шумом с вероятностью р , и восстановленного МФ 3x3 С L = 4 и весом центрального элемента 2ЛГ + 1 .
|
К |
Вероятность, p |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
1,000000 |
0,999998 |
0,999934 |
0,995035 |
0,902145 |
|
1 |
1,000000 |
0,999960 |
0,999420 |
0,983014 |
0,832932 |
|
2 |
0,999993 |
0,999209 |
0,994276 |
0,934070 |
0,682968 |
|
3 |
0,999607 |
0,990833 |
0,966342 |
0,835902 |
0,550034 |
|
4 |
0,990000 |
0,950000 |
0,900000 |
0,750000 |
0,500000 |
Таблица 2. Вероятность получения неискаженного пикселя изображения, искаженного импульсным шумом с вероятностью р , и восстановленного МФ 5x5 с L =12 и весом центрального элемента 2^ + 1
|
К |
Вероятность, p |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
1,000000 |
1,000000 |
1,000000 |
0,999996 |
0,993259 |
|
1 |
1,000000 |
1,000000 |
1,000000 |
0,999985 |
0,988546 |
|
2 |
1,000000 |
1,000000 |
1,000000 |
0,999914 |
0,972500 |
|
3 |
1,000000 |
1,000000 |
1,000000 |
0,999586 |
0,939311 |
|
4 |
1,000000 |
1,000000 |
0,999999 |
0,998292 |
0,883097 |
|
5 |
1,000000 |
1,000000 |
0,999987 |
0,994030 |
0,803706 |
|
6 |
1,000000 |
0,999999 |
0,999904 |
0,982426 |
0,711078 |
|
7 |
1,000000 |
0,999986 |
0,999403 |
0,956777 |
0,623324 |
|
8 |
1,000000 |
0,999861 |
0,997022 |
0,911891 |
0,557509 |
|
9 |
0,999998 |
0,998932 |
0,988406 |
0,852043 |
0,519901 |
|
10 |
0,999936 |
0,993990 |
0,966082 |
0,794916 |
0,504515 |
|
11 |
0,998867 |
0,977232 |
0,929199 |
0,760142 |
0,500502 |
|
12 |
0,990000 |
0,950000 |
0,900000 |
0,750000 |
0,500000 |
Таблица 3. Вероятность получения неискаженного пикселя изображения, искаженного импульсным шумом с вероятностью р, и восстановленного МФ 7x7 с Z = 24 и весом центрального элемента 2^ + 1
|
К |
Вероятность, p |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
1,000000 |
1,000000 |
1,000000 |
1,000000 |
0,999839 |
|
1 |
1,000000 |
1,000000 |
1,000000 |
1,000000 |
0,999729 |
|
2 |
1,000000 |
1,000000 |
1,000000 |
1,000000 |
0,999306 |
|
3 |
1,000000 |
1,000000 |
1,000000 |
1,000000 |
0,998237 |
|
4 |
1,000000 |
1,000000 |
1,000000 |
1,000000 |
0,995 822 |
|
5 |
1,000000 |
1,000000 |
1,000000 |
0,999999 |
0,990823 |
|
6 |
1,000000 |
1,000000 |
1,000000 |
0,999998 |
0,981325 |
|
7 |
1,000000 |
1,000000 |
1,000000 |
0,999990 |
0,964780 |
|
8 |
1,000000 |
1,000000 |
1,000000 |
0,999962 |
0,938411 |
|
9 |
1,000000 |
1,000000 |
1,000000 |
0,999867 |
0,900057 |
|
10 |
1,000000 |
1,000000 |
1,000000 |
0,999575 |
0,849294 |
|
11 |
1,000000 |
1,000000 |
1,000000 |
0,998756 |
0,788378 |
|
12 |
1,000000 |
1,000000 |
1,000000 |
0,996685 |
0,7223 86 |
|
13 |
1,000000 |
1,000000 |
0,999998 |
0,991983 |
0,658177 |
|
14 |
1,000000 |
1,000000 |
0,999989 |
0,982455 |
0,602417 |
|
15 |
1,000000 |
1,000000 |
0,999945 |
0,965355 |
0,559525 |
|
16 |
1,000000 |
0,999999 |
0,999755 |
0,93 8422 |
0,530572 |
|
17 |
1,000000 |
0,999991 |
0,999053 |
0,901635 |
0,513624 |
|
18 |
1,000000 |
0,999939 |
0,996829 |
0,858718 |
0,505151 |
|
19 |
1,000000 |
0,999658 |
0,990933 |
0,816798 |
0,501603 |
|
20 |
0,999999 |
0,998410 |
0,978204 |
0,783453 |
0,5003 94 |
|
21 |
0,999982 |
0,994086 |
0,956705 |
0,762705 |
0,500072 |
|
22 |
0,999758 |
0,983086 |
0,930065 |
0,753233 |
0,500009 |
|
23 |
0,997862 |
0,964832 |
0,908526 |
0,750411 |
0,500001 |
|
24 |
0,990000 |
0,950000 |
0,900000 |
0,750000 |
0,500000 |
Тогда функция распределения пикселей изображения, искаженного импульсным шумом, по формуле (6) будет иметь вид
О,
если х < 0;
Р , ^~Р)х 2 N
если 0 < х < N; (13)
если х > N.
График функции (13) на промежутке (o,n) для р = ОД и N = 255 (случай 8-битных изображений в оттенках серого) показан на рис. 2а. Результат применения МФ с ВЦЭ искажает обрабатываемое изображение. Для оценки уровня этого искажения необходимо исследовать функцию в FY (X) из формулы (5) с учетом подстановки в нее функции Fx^ из формулы (13).
На рис. 2 б - 2 е показан график функций F^xY полученный для случая р = 0,1, N = 255, L = 4
(случай МФ 3x3) с различными значениями K = 0;l;2;3;4 .
Из рис. 2 б - 2 е видно, что для малых значений К функция распределения Fy ^х^ существенно изменяется относительно функции F^xY а при увеличении К разница между этими функциями становится все меньше и меньше. Для оценки степени различия функции Fy (х) и Fx^ будем использовать величину I:
N
I = J|Fy (x) - FY (x)|t7x.
Геометрический смысл этого интеграла показан на рис. 3: он равен площади фигуры, заключенной между графиками функции Fy(x) и Fx(x). Чем меньше величина I, тем ближе функции Fy (x) и FY (л) друг к другу в смысле метрики функционального пространства.
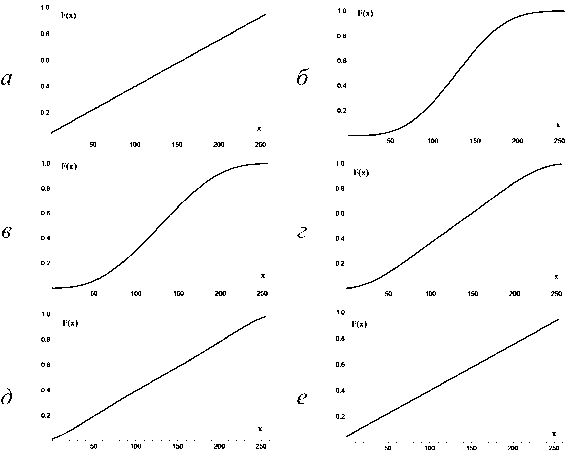
Рис . 2. Графики функций распределения для изображений в оттенках серого с N = 255, обработанных МФ с Z = 4 и различными весовыми коэффициентами центрального элемента: a ) зашумленное изображение /2 = 0,1; б ) ^ = 0;
в ) ^ = 1 ; г ) ^ = 2 ; д ) ^ = 3 ; е ) K = 4
В таблицах 4-6 приведены значения величины I из формулы (14) для изображений в оттенках серого с # = 255, зашумленных импульсным шумом с вероятностями /> = 0.01; 0,05; 0,1; 0,25; 0,5, и медианных фильтров с масками 3x3, 5x5, 7x7 с различными весами центрального коэффициента.
Из таблиц 4 - 6 видно, что увеличение веса центрального элемента К ведет к уменьшению величины I во всех случаях. Это означает, что применение больших коэффициентов центрального элемента в МФ с ВЦЭ значительно меньше искажает структуру изображения по сравнению с малыми значениями К .
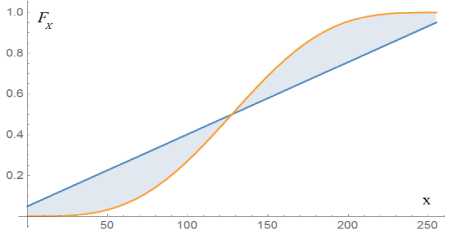
Рис. 3. Геометрический смысл величины 1 для случая N = 255, р = ОД, L = 4, K = 0
Как было показано ранее, увеличение коэффициента к , с одной стороны, уменьшает структурное искажение изображения от применения МФ, а с другой стороны увеличивает вероятность получения искаженных значений пикселей, то есть вероятность пропуска шумовых компонент. Таким образом, практическое применение МФ требует нахождения оптимальной величины к, которая позволяла бы минимально искажать структуру обрабатываемого изображения при максимально большой вероятности корректной очистки от шума.
Таблица 4. Значения величины 1 для МФ 3x3 с L = 4 и весом центрального элемента 2 К + 1 (случаи N = 255 )
|
К |
Вероятность, р |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
32,6936 |
33,9091 |
35,2619 |
37,8891 |
35,2864 |
|
1 |
27,0591 |
28,0375 |
29,0655 |
30,5709 |
26,7776 |
|
2 |
15,7902 |
16,2954 |
16,6891 |
16,3175 |
11,9662 |
|
3 |
5,5946 |
5,6899 |
5,6186 |
4,6649 |
2,5224 |
|
4 |
0 |
0 |
0 |
0 |
0 |
Таблица 5. Значения величины I для МФ 5x5 с £ = 12 и весом центрального элемента 2ЛГ + 1 (случай N = 255 )
|
К |
Вероятность, р |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
44,4278 |
46,1374 |
48,1694 |
53,3407 |
56,1843 |
|
1 |
42,9539 |
44,6014 |
46,5480 |
51,3952 |
53,3352 |
|
2 |
39,0935 |
40,5785 |
42,3016 |
46,2998 |
45,9520 |
|
3 |
33,7593 |
35,0197 |
36,4339 |
39,2601 |
36,0178 |
|
4 |
27,8293 |
28,8400 |
29,9109 |
31,4394 |
25,5593 |
|
5 |
21,9678 |
22,7317 |
23,4633 |
23,7285 |
16,2189 |
|
6 |
16,5806 |
17,1177 |
17,5376 |
16,7021 |
9,0108 |
|
7 |
11,8699 |
12,2086 |
12,3570 |
10,7121 |
4,2463 |
|
8 |
7,9171 |
8,0895 |
8,01543 |
6,0025 |
1,6206 |
|
9 |
4,7486 |
4,7890 |
4,55979 |
2,7354 |
0,4667 |
|
10 |
2,3712 |
2,3208 |
2,04596 |
0,8906 |
0,0896 |
|
И |
0,7866 |
0,7127 |
0,54411 |
0,1532 |
0,0086 |
|
12 |
0 |
0 |
0 |
0 |
0 |
Таблица 6. Значения величины I для МФ 7x7 с L = 24 и весом центрального элемента 2К + 1 (случай N = 255 )
|
К |
Вероятность, р |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
0 |
49,9278 |
51,8690 |
54,2194 |
60,6007 |
66,9959 |
|
1 |
49,3612 |
51,2786 |
53,5961 |
59,8528 |
65,8749 |
|
2 |
47,7741 |
49,6246 |
51,8502 |
57,7578 |
62,7357 |
Таблица 6. Значения величины I для МФ 7х7с£ = 24и весом центрального элемента 2 К +1 (случай N = 255 ) (окончание)
|
К |
Вероятность, р |
||||
|
0,01 |
0,05 |
0,1 |
0,25 |
0,5 |
|
|
3 |
45,3681 |
47,1173 |
49,2037 |
54,5819 |
57,9812 |
|
4 |
42,3754 |
43,9986 |
45,9117 |
50,6315 |
52,0785 |
|
5 |
39,0222 |
40,5042 |
42,2232 |
46,2053 |
45,4914 |
|
6 |
35,5023 |
36,8361 |
38,3513 |
41,5590 |
38,6320 |
|
7 |
31,9632 |
33,1479 |
34,4582 |
36,8874 |
31,8398 |
|
8 |
28,5060 |
29,5452 |
30,6554 |
32,3241 |
25,3848 |
|
9 |
25,1934 |
26,0931 |
27,0115 |
27,9517 |
19,4807 |
|
10 |
22,0602 |
22,8280 |
23,5650 |
23,8170 |
14,2955 |
|
11 |
19,1242 |
19,7683 |
20,3353 |
19,9447 |
9,9504 |
|
12 |
16,3933 |
16,9224 |
17,3313 |
16,3493 |
6,5076 |
|
13 |
13,8708 |
14,2938 |
14,5567 |
13,0437 |
3,9563 |
|
14 |
11,5581 |
11,8837 |
12,0127 |
10,0467 |
2,2091 |
|
15 |
9,4555 |
9,6926 |
9,6999 |
7,3880 |
1,11757 |
|
16 |
7,5631 |
7,7205 |
7,6186 |
5,1096 |
0,5043 |
|
17 |
5,8810 |
5,9676 |
5,7697 |
3,2581 |
0,1992 |
|
18 |
4,4091 |
4,4338 |
4,1558 |
1,8660 |
0,0673 |
|
19 |
3,1475 |
3,1194 |
2,7844 |
0,9273 |
0,0189 |
|
20 |
2,0962 |
2,0255 |
1,6716 |
0,3812 |
0,0042 |
|
21 |
1,2552 |
1,1561 |
0,8423 |
0,1208 |
0,0007 |
|
22 |
0,6244 |
0,5226 |
0,3147 |
0,0260 |
0,0000 |
|
23 |
0,2048 |
0,1410 |
0,0646 |
0,0029 |
0,0000 |
|
24 |
0 |
0 |
0 |
0 |
0 |
Для моделирования были использованы полутоновые изображения «горы» и «грибы», которые изображены на рис. 4 и рис. 5 вместе с зашумленными импульсным шумом изображениями, сгенерированными функцией imnoise в программ- ной среде Matlab R2015b.
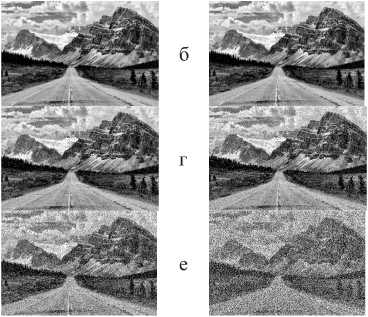
Рис . 4. Изображение «горы», зашумленные импульсным шумом с различной интенсивностью: а) исходное изображение; б) р = 0,01; PSNR = 24,9554;
^р = 0,05 ; PSNR= 18,012; г) р = 0,1; PSNR= 15,0178;
д) р = 0,25; PSNR = 11,0529; с) р = 0,5 ; PSNR = 8,0322
В качестве вероятности появления шумовых пикселей были выбраны значения р = 0,01;0,05;0,1;0,25;0,5.
Для оценки качества очистки изображения от шума была использована характеристика PSNR (пиковое отношение «сигнал-шум»), которая вычисляется по формуле:
P5W = 101og10
гр Л
MSE ,
где MSE = ---- — -----—-— – среднеквадра-
^1 ^2
тическая ошибка сравнения качества восстановленного изображения; N – максимальная величина пикселя изображения; D^ и D2 – ширина и высота изображения, а суммирование производится по всем координатам пикселей изображения.
Величина PSNR имеет логарифмическую природу, и единицей ее измерения является дБ. Чем больше величина PSNR, тем лучше качество восстановленного изображения, для тождествен- но равных изображений PSNR = oo . При иссле- довании алгоритмов сжатия и очистки от шума изображений в оттенках серого практически пригодной считается величина PSNR, изменяющаяся в пределах от 20 дБ до 50 дБ.
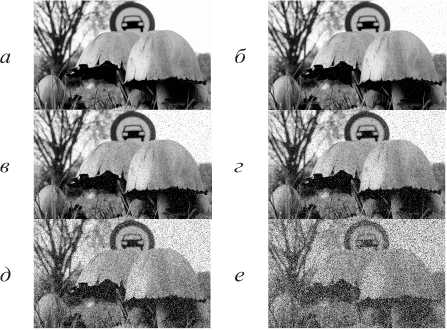
Рис. 5. Изображение «грибы», зашумленные импульсным шумом с различной интенсивностью: а) исходное изображение; б) /> = 0,01, PSNR=24,6028; в) p = 0,05 ; PSNR = 17,6645; r) p = 0,1; PSNR = 14,649; д) p = 0,25; PSNR = 10,6848; e) p = 0,5; PSNR = 7,6496
Над зашумленными изображениями на рис . 4 - 5 были применены МФ с ВЦЭ с окнами W размером 3x3;5x5 и 7x7, которым соответствуют значения L = 4; Z = 12 и Л = 24. Для каждого медианного фильтра были испытаны все возможные значения веса центрального элемента К : 0 < К < L. На рисунке 6 показан пример обработки изображения «горы» с уровнем шума р = 0,25 при помощи МФ с ВЦЭ с окном W размером 3x3 и различными К . Результаты обработки изображений «горы» и «грибы» во всех случаях показаны на рис. 7 - 8.
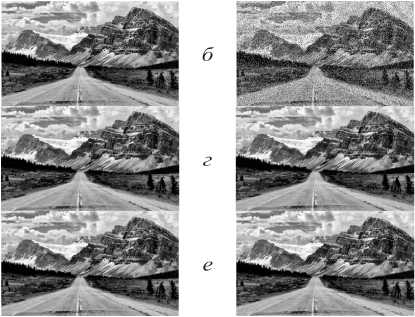
Рис. 6. Результат обработки изображения «горы», зашумленного импульсным шумом с р = 0,25 МФ с окном 3x3 с различными весами центрального элемента: а ) исходное изображение; б ) зашумленное изображение, PSNR = 11,0529; в ) к = о , PSNR= 23,9900; г ) ^ = 1, PSNR = 21,3842; д ) ^ = 2 , PSNR = 16,4518; е ) К = 3 , PSNR = 12,7548
На рис. 7 а , 7 б , 8 а и 8 б отчетливо видно возрастание качества очистки от шума, выраженного величиной PSNR, достижение максимального значения и последующее снижение качества обработки, при изменении К от 0 до L , во всех случаях. Это связано с тем, что для небольших уровней шума существенную роль играет сохранение структуры изображения, изменения которой зависит от величины I , приведенной в таблицах 4 - 6. Снижение качества обработки для больших значений К объясняется существенным снижением вероятности получения неискаженного пикселя изображения, которая приведена в таблицах 1-3.

Рис. 7. Результаты обработки МФ изображения «горы» с различными уровнями импульсного шума: а) р = 0,01; б) р = 0,05 ; в) р = 0,1; г) р = 0,25; д) р = 0,5
Для высоких уровней шума (см. рис.7 в - 7 д , 8 в - 8 д ) возрастание качества обработки до достижения максимального значения за счет уменьшения величины I уже не так хорошо заметно из-за существенного увеличения влияния вероятности получения неискаженного пикселя изображения. Наилучшие значения PSNR между исходными изображениями и изображениями, очищенными от шума при помощи МФ с ВЦЭ, приведены в таблице 8. Из таблицы 8 видно, что для уровней шума от 0,01 до 0,1 наилучший результат показывает фильтр с окном 3x3.
Для уровня шума р = 0,25 наилучший результат показывает фильтр с окном 5x5, а для уровня шума Р = 0,5 наилучший результат показывает фильтр с окном 7x7. Данный факт может быть объяснен тем обстоятельствам, что наилучшие результаты обработки изображений достигались при к*о.
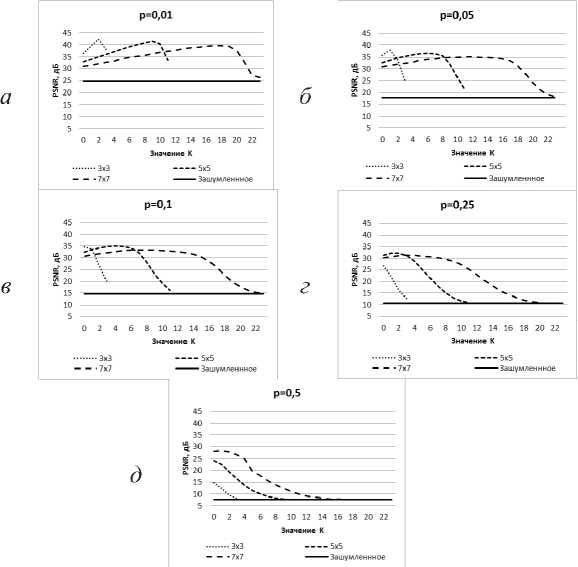
Рис. 8. Результаты обработки МФ изображения «грибы» с различными уровнями импульсного шума: а ) 72 = 0,01;
б ) р = 0,05 ; в) Р = 0,1 ; г) /> = 0,25 ; д) р = 0,5
В тех случаях, когда ^ = 0, результат не являлся наилучшим по причине строгого убывания величины PSNR (это хорошо видно на графиках из рис. 7 - 8). Другими словами, значения PSNR не является экстремальным для этих случаев, что и объясняет относительно низкий результат обработки. Улучшение результата обработки изображений с высоким уровнем шума фильтрами большего размера объясняется относительно высокой вероятностью получения неискаженных пикселей изображения. Это хорошо видно из верхних строк таблиц 1-3. Так, например, для уровня шума Р = 0,5 вероятность получения неискаженного пикселя изображения, обработанного фильтром 3x3 с^ = 0 , составляет «0,9021; обработанного фильтром 5x5 с^ = 0 составляет «0,9933; обработанного фильтром 7x7 с^ = 0 составляет «0,9998.
Полученные результаты могут быть систематизированы следующим образом: для небольших уровней шума лучшее качество обработки изображений в оттенках серого достигается при использовании медианных фильтров наименьшего размера (3x3). Для высоких уровней шума целесообразнее использовать медианные фильтры большего размера (5x5 и 7x7). Для использования МФ с ВЦЭ на практике следует определять характеристики возникающего шума для подбора наилучшего размера маски фильтра и веса центрального элемента. Кроме того, МФ с ВЦЭ могут быть использованы в системах адаптивной фильтрации изображений следующим образом: осуществлять определение уровня шума с последующим подбором наилучшего МФ с ВЦЭ по показателю уровня очистки.
Таблица 8. Наилучшие значения PSNR при МФ изображений с различными уровнями интенсивности импульсного шума
|
Уровни интенсивности шума, р |
Размер окна |
Изображение «горы» |
Изображение «грибы» |
||
|
PSNR, дБ |
К |
PSNR, дБ |
к |
||
|
0,01 |
3x3 |
35,5095 |
3 |
42,2584 |
2 |
|
5x5 |
35,4846 |
10 |
41,4250 |
9 |
|
|
7x7 |
34,7326 |
19 |
39,6269 |
18 |
|
|
0,05 |
3x3 |
30,9645 |
2 |
37,8918 |
1 |
|
5x5 |
30,6255 |
7 |
36,6489 |
6 |
|
|
7x7 |
29,7289 |
15 |
35,0498 |
12 |
|
|
0,1 |
3x3 |
29,2184 |
1 |
34,6385 |
0 |
|
5x5 |
28,5595 |
5 |
34,9324 |
4 |
|
|
7x7 |
27,6093 |
12 |
33,2754 |
8 |
|
|
0,25 |
3x3 |
23,9896 |
0 |
26,7474 |
0 |
|
5x5 |
25,8744 |
3 |
32,2554 |
2 |
|
|
7x7 |
25,0730 |
4 |
31,3112 |
4 |
|
|
0,5 |
3x3 |
14,6351 |
0 |
14,6638 |
0 |
|
5x5 |
21,5800 |
0 |
24,1330 |
0 |
|
|
7x7 |
22,9915 |
2 |
28,4957 |
1 |
|
В работе показано применение МФ с взвешенными центральными элементами для очистки от импульсного шума изображений в оттенках серого. Показано, что на качество обработки влияют две характеристики: вероятность получения неискаженного пикселя изображения и уровень искажения функции распределения пикселей изображения. Фильтры с окном 3x3 в меньшей мере искажают входное изображение, однако имеют меньшую вероятность получения неискаженного пикселя изображения. Данные фильтры позволяют получать более высокое качество очистки изображений от шума с небольшой вероятностью искажения пикселей (р<0,1).
Медианные фильтры с размерами окон 5x5 и 7x7 значительно сильнее искажают функцию распределения пикселей изображения, однако имеют значительно более высокую вероятность получения неискаженных пикселей при обработке. Такие фильтры позволяют получать более высокое качество очистки изображений от шума с высокой вероятностью искажения пикселей (^>0,1). Причем чем выше уровень шума, тем больший размер маски МФ может потребоваться.
Полученный результат может быть использован для улучшения качества медицинских и спутниковых изображений, а также при разработке систем адаптивной фильтрации. При этом для эффективного практического использования необходимо проводить технический анализ системы на шумовые характеристики для подбора наилучшего соотношения размера маски МФ и веса его центрального элемента. Работа выполнена при финансовой поддержке гранта Президента Российской Федерации МК-5980.2016.9.
Chervyakov N.I., Lyakhov P.A., Orazaev A.R.
North-Caucasus Federal University, Stavropol, Russian Federation
Список литературы Применение медианных фильтров с взвешенным центральным элементом для очистки изображений от импульсного шума
- Воронин В.В. Исследование метода фильтрации видеосигналов на основе адаптивного двумерного метода размножения оценок // Информационные технологии. Радиоэлектроника. Телекоммуникации. №3, 2013. - С. 55-61.
- Прэтт У. Цифровая обработка изображений. Пер. с англ. М.: Мир, 1978. - 790 c.
- Грузман И. С. Цифровая обработка изображений в информационных системах. Новосибирск: Изд-во НГТУ, 2000. - 168 c.
- Tukey J.W. Exploratory data analysis. Pearson, 1977. - 711 c.
- Sarkar A., Changder S., Mandal J.K. A Threshold based directional weighted median filter for removal of random impulses in thermal images // Business and Information Management (ICBIM), 2014 2-nd International Conference on. IEEE, 2014. - P. 69-74. DOI: 10.1109/ICBIM.2014.6970936
