Применение метода инвариантных эллипсоидов для решения линейной задачи слежения

Автор: Железнов К.О., Хлебников М.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Математика. Информатика
Статья в выпуске: 4 (20) т.5, 2013 года.
Бесплатный доступ
В работе рассматривается линейная задача слежения, состоящая в построении линейной обратной связи такой, чтобы выход системы был «как можно ближе» к сигналу, подаваемому на вход линейной системы управления. Предлагается подход к решению задачи, основанный на методе инвариантных эллипсоидов. Его эффективность продемонстрирована на примере двухмассовой системы.
Линейная система управления, задача слежения, линейные матричные неравенства, инвариантные эллипсоиды, ограничивающие эллипсоиды
Короткий адрес: https://sciup.org/142185953
IDR: 142185953 | УДК: 517.977.1
Текст научной статьи Применение метода инвариантных эллипсоидов для решения линейной задачи слежения
Целью работы является исследование задачи управления регулируемым выходом линейной системы в одной из разнообразных постановок задачи слежения (см., например, [1-3]), одна, из первых постановок этой задачи восходит к Р. Калману [4].
В работе рассматривается задача, слежения в линейной системе управления. Цель управления (которое ищется в виде статической линейной обратной связи) состоит в том, чтобы регулируемый выход системы был как можно «ближе» (в некотором смысле) к сигналу, подаваемому на. вход системы.
Предлагаемый подход к решению задачи основан на. методе инвариантных эллипсоидов [5]; в качестве технического средства, используется техника, линейных матричных неравенств (Linear Matrix Inequalities, LMI) [6]. Такой подход позволил переформулировать исходную задачу к поиску минимального ограничивающего эллипсоида, содержащего выход рассматриваемой системы. В качестве критерия минимальности в работе выбран критерий следа, соответствующий минимизации суммы квадратов полуосей эллипсоида.
С технической точки зрения проблема, сводится к решению задачи полуопределенного программирования (Semi-Definite Programming, SDP) и одномерной оптимизации [7]. Для ее решения существуют эффективные программные средства, в частности — свободно распространяемые пакеты SeDuMi и YALMIP на. базе системы Matlab.
Эффективность метода продемонстрирована на примере управления двухмассовой системой [8].
2. Задача анализа
Рассмотрим линейную непрерывную динамическую систему х = Ах + Df (t), х(0) = хо, г = f (t) - Сх, где А Е Rnxn, С Е R/xn, D Е Rnx/, x(t) Е Rn — фазовое состояние системы, г(t) Е Rz — выход системы. Пусть матрица А устойчива, а сигнал f (t) Е R' удовлетворяет условию f = Aof + Dow, (1)
где Ао Е R/x/, Do Е Rixm, a w(t) Е Rm — внешнее возмущение, удовлетворяющее ограни чению
IIw(t) ^ 6 1 V t > 0.
Матрицу Ао будем предполагать устойчивой (гурвицевой). Рассмотрим расширенную систему х = Ах + Df , f = Ао f + Dow, (3)
г = f — Сх.
Введя в рассмотрение составной вектор
9 =
(е Rn+/,
представим систему в матричной форме:
9=(а АО)9AD)r ⏟ ⏞⏟⏞
-
-—•-—•
AD г = (—С I) 9.
Нам понадобятся следующие определения.
Определение 1. Эллипсоид с центром в начале координат
8х = {х е Rn: хтР-1х 6 1}, Р > 0,(5)
называется инвариантным для динамической системы х = Ах + Dw, если из условия х(0) е 8Х следует х(t) е 8Х для всех моментов времени t > 0. Это означает, что фазовое состояние системы будет всегда находиться в 8Х, если оно находится в этом эллипсоиде в начальный момент времени.
В дальнейшем все матричные неравенства понимаются в смысле знакоопределенности матриц.
Определение 2. Эллипсоид с центром в начале координат
-
8, = {г е Rz: гт (СРСТ)-1г 6 1}, Р > 0,
называется ограничивающим по выходу для динамической системы х = Ах + Dw, х(0) = хо, г = Сх, соответствующим инвариантному эллипсоиду (5). Соответственно если состояние хо принадлежит инвариантному эллипсоиду с матрицей Р, то выход системы г(t) будет находиться в эллипсоиде 8, для всех t > 0.
Теперь можно переформулировать задачу: будем минимизировать ограничивающий эллипсоид, содержащий выход г системы (4).
Теорема 1. Решение I3 задачи trCPCT —> min при ограничениях
АР + РАТ + аР + ^DDт 6 0, Р > 0, где
А = (А АО) ■ D=(Do) ■ С=<—С1 > ■ а минимизация проводится по матричной переменной Р = РТ Е R(n+m)x(n+m) и скалярному параметру а > 0, определяет матрицу
СРС
Т
ограничивающего эллипсоида для выхода z системы (3).
Доказательство. Введем в рассмотрение квадратичную форму
V(g) = дТQg, Q> 0, построенную на. решениях системы (4). Вычисляя ее производную в силу системы, имеем
V(g) = (Ад + D w)T Qg + дТ Q(Ag + Dw) = дТ (Ат Q + QA)g + 2gT QDw.
Для того чтобы траектории системы не вышли за границу эллипсоида £д = {д: gTQg 6 1}, потребуем, чтобы при V(д) > 1 и wTw 6 1 выполнялось условие V(д) 6 0. Иными словами, дТ(АТQ + QA)g + 2wTDTQg 6 0 V (g,w): дТQg > 1, wTw 6 1. (6)
Применяя 5-теорему [9] с двумя ограничениями, заключаем, что (6) эквивалентно выполнению следующего матричного неравенства при некоторых значениях а, 3 таких, что а > 3 > 0:
Ат Q + QA + aQ QD
DТ Q -31
По лемме Шура полученное линейное матричное неравенство эквивалентно
А Q + QA + aQ + 3QDD Q 6 0.
Домножив (7) на матрицу Р = Q 1 слева и справа, приходим к матричному неравенству
АР + РАТ + аР + pDDT
6 0;
при ЭТОМ, согласно [10], МОЖНО ПОЛОЖИТЬ 3 = 3шах = а.
Выбирая среди эллипсоидов полученного семейства.
АР + РАТ + аР + -DDT 6 0
эллипсоид Р > 0 такой, что соответствующий ему ограничивающий эллипсоид с матрицей СРС Т обладает минимальным следом, приходим к утверждению теоремы. Теорема доказана. ■
Заметим, что V(д) является квадратичной функцией Ляпунова для системы (4) вне инвариантного эллипсоида с матрицей Р.
3. Задача синтеза
Рассмотрим линейную непрерывную систему управления:
X = Ах + Ви + D/(t), х(0) = хд, z = /(t) - Сх, где А Е Rnxn, В Е Rnxp, С Е R/xn, D Е Rnx/, x(t) Е Rn — фазовое состояние системы, u(t) Е Rp — управление, z(t) Е Rz — выход системы. Пусть сигнал /(t) Е Rz удовлетворяет условиям (1), (2).
Задача состоит в построении регулятора К в форме статической линейной обратной связи по состоянию
U = К1Х + ^f,
где К1 G Rpxn, К2 G Rpx/, который стабилизирует замкнутую систему и минимизирует (по критерию следа) ограничивающий эллипсоид для выхода z. Будем предполагать, что текущее значение сигнала f (t) известно, и поэтому можно его использовать для построения обратной связи.
Рассмотрим расширенную систему
X = Ах + Ви + Df, f = Аof + Dow, z = f (t — Cx,
или, в виде, замкнутом регулятором (8),
X = (А + ВК1)х + (ВК2 + D)f, f = Аof + Dow, z = f — Cx.
(Ю)
Система (10) представима относительно вектора д в следующем матричном виде:
д=( ⏟
А + ВК1 D + ВК2
А о
) д + U) "■
~
А
~
D
В следующей теореме устанавливается способ нахождения искомого регулятора рассматриваемой системы, а также соответствующий ограничивающий эллипсоид.
Для
̂︀
̂︀
Теорема 2. Решение Р > 0, Ү задачи минимизации
trCPC T —> min
при ограничении
АР + РАТ + аР + ВҮ + ҮTВТ + -DDT 6 0,
(И)
где
а минимизация Ү G Rfa+Oxfa+O по состоянию
■'=g .у- ■=(o, -=(a, проводится no матричным переменным Р = РТ G R(n+/)x(n+/); и скалярному параметру a > 0, определяет статический регулятор
К = (К1 К 2) = ҮР -1
и матрицу
CPC T
соответствуюгцего ограничивающего эллипсоида для выхода системы (9).
Доказательство. Применяя теорему 1 к замкнутой системе, приходим к задаче минимизации
tr CPCT —> min
при ограничении
(
А + ВК1 D + ВК2
Ао
)Р +Р(
А + ВК1 D + ВК2
Ао
) T + “Р + 1 ( D )( D ) T 6 0, a \J0oy D^OoJ
которое представимо в виде
(А X) р + р (о АО)" + “р + (о)<л'1 ЛУ р +
+ р К K2f (о У + 5 (D)(D )" 6 °. 1121
В матричное неравенство (12) переменные Р, Кі и К2 входят нелинейно. Введя матричную переменную
Ү = (К1 К2) Р, неравенство (12) примет линейный (по переменным Р и Ү) вид (11). Теорема доказана. ■
4. Пример: двухмассовая система
Продемонстрируем предложенный подход к решению задачи слежения на примере двухмассовой системы [8] (см. рис. 1).
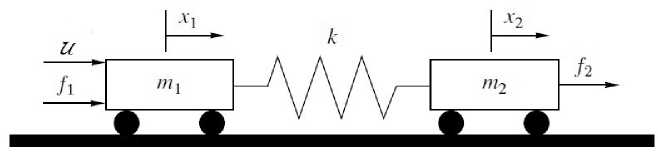
Рис. 1. Двухмассовая система.
Обозначим через хі, «і координату и скорост в левого тела, а через Х2, «2 — координату и скороств правого тела. Тогда.
/хЛ
«1 х = Ж2
«2
еств вектор фазового состояния динамической системы. Пуств к левому телу приложено управляющее воздействие п, а задающий сигнал с компонентами fi и /2 воздействует на каждое из тел.
Непрерывная модель возмущенных колебаний системы описывается уравнениями х 1 = «1, х 2 = «2,
«1 =
-
к к 1
---Х1 +-- Х2 +-- fi + П,
т1 т2 т1
• к к . 1 г
«2 = ---Х1--Х2 +--/2.
т1 т2 т2
Будем считать массы тел и коэффициент упругости пружины единичными. Тогда, в матричной форме имеем х = Ах + Df,
2 = f — Сх, где
1000 С 0 10 0 ‘
При
Ло = ( -05 5 ) , Do = (фЭ
- 0 5 - 0 5 - 0 5
с помощвю теоремы 2 найдем ограничивающий эллипс выхода и соответствующий регулятор.
Заметим, что естественно потребоватв ограничения на величину управления вида
||u(t)| 6 ц V t > 0. (13)
Достаточное условие выполнения ограничения (13) установлено следующей леммой.
Лемма 1 ([11]). Условие
(' Й).....
гарантирует выполнение условия (13) внутри инвариантного эллипсоида с матрицей Р.
Это условие добавляется в качестве дополнительного ограничения в формулировку теоремы 2.
Итак, полагая
Ц = 5, находим регулятор к = (-31,3569 ⏟
- 17 , 3058 9 , 4955 - 17 , 2320
26 , 2767 9 , 5308
⏟⏞ К
К и матрицу ограничивающего эллипса:
СРС
т
0 , 3044
- 0 , 1383
- 0 , 1383 0 , 6609
,
при этом tr CpC t = 0 , 9653.
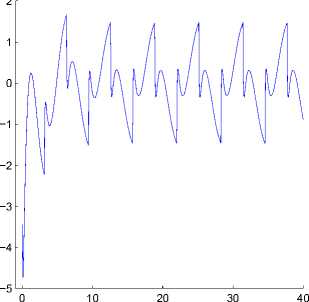
На рис. 2 слева показан найденный ограничивающий эллипс выхода, а также траектория выхода системы при некотором начальном состоянии системы вне инвариантного эллипсоида и возмущении w(t) = sign sin t; справа показан соответствующий график управляющего воздействия.
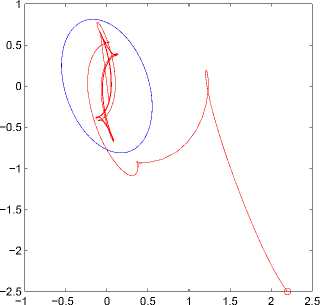
Рис. 2. Ограничивающий эллипс выхода, траектория выхода, системы и управление
Заметим, что, не используя информацию о текущем значении сигнала /(t) (то есть при К = 0), получим регулятор, который также стабилизирует систему (9); однако при этом ограничивающий эллипсоид окажется примерно в 6 раз больше по критерию следа.
5. Заключение
В статье предложен подход к построению обратной связи в одной из постановок линейной задачи слежения. Подход основан на. методе инвариантных эллипсоидов, применение которого позволило переформулировать исходную проблему в терминах линейных матричных неравенств и свести поиск ограничивающего эллипсоида, для выхода, системы к задаче полуопределенного программирования, легко решающейся численно. Эффективность метода. продемонстрирована, на. примере двухмассовой системы.
Список литературы Применение метода инвариантных эллипсоидов для решения линейной задачи слежения
- Мирошник И.В., Никифоров В.О., Фрадков А.Л. Нелинейное и адаптивное управление сложными динамическими системами. -СПб.: Наука, 2000
- Краснова С.А. Каскадный синтез наблюдателей состояния динамических систем. -М.: Наука, 2006
- Ахобадзе А.Г., Краснова С.А. Задача слежения в линейных многомерных системах при наличии внешних возмущений//Автоматика и телемеханика. -2009. -№ 6. -С. 21-47
- Kalman R. Contributions to the theory of optimal control//Boletin de la Sociedad Matematica Mexicana. -1960. -N 1. -P. 102-119
- Хлебников М.В., Поляк Б.Т., Кунцевич В. М. Оптимизация линейных систем при ограниченных внешних возмущениях (техника инвариантных эллипсоидов)//Автоматика и телемеханика. -2011. -№ 11. -С. 9-59
- Boyd S., El Ghaoui L., Feron E., Balakrishnan V. Linear Matrix Inequalities in System and Control Theory. -Philadelphia: SIAM, 1994
- Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. -М.: Наука, 2002
- Reinelt W. Robust control of a two-mass-spring system subject to its input constraints//Proc. American Control Conference. -Chicago, USA, June 28-30, 2000. -P. 1817-1821
- Polyak B.T. Convexity of quadratic transformations and its use in control and optimization//Journ. Optim. Theory and Appl. -1998. -V. 99. -P. 533-583
- Хлебников М. В. Время установления в линейной динамической системе с ограниченными внешними возмущениями//Автоматика и телемеханика. -2012. -№ 6. -C. 3-17
- Назин С.А., Поляк Б.Т., Топунов М.В. Подавление ограниченных возмущений с помощью метода инвариантных эллипсоидов//Автоматика и телемеханика. -2007. -№ 3. -С. 106-125
