Применение методов машинного обучения в задаче топологической оптимизации упругой пластины

Автор: Авдонюшкин Д.В., Матвеева А.И., Новокшенов А.Д.
Статья в выпуске: 3, 2023 года.
Бесплатный доступ
В качестве альтернативы традиционным методам топологической оптимизации деформируемых твердых тел предложен подход к топологической оптимизации на основе методов машинного обучения. Предложенный подход существенно уменьшает время, затрачиваемое на получение оптимального решения, и позволяет избежать использования ресурсоемких конечно-элементных вычислений на стадии получения оптимального решения. Все ресурсоемкие вычисления выполняются на стадии тренировки сети. Приводится обзор мировой литературы по теме применения методов машинного обучения в задаче топологической оптимизации упругого тела. Далее в качестве примера рассматривается квадратная упругая пластина, жестко закрепленная с одной стороны и нагруженная силой с другой. Для данной пластины с помощью метода скользящих асимптот решается серия задач топологической оптимизации (максимизации жесткости при ограничении на объём) для построения тренировочного набора данных. Проводится сравнительное исследование нейронной сети с одним пользовательским нелинейным слоем, созданным исходя из особенностей оптимальной топологии, и трехслойной нейронной сети, построенной с помощью стандартных функций библиотеки PyTorch. Входным параметром нейронной сети является точка приложения силы, выходным - оптимальная топология пластины. Обучение сети происходит с помощью метода обратного распространения ошибки. Квадратичная норма вектора отклонений предсказанных значений проектных переменных от значений, полученных на последнем шаге оптимизации, минимизируется в процессе обучения нейронной сети. Рассмотренный пример демонстрирует возможность применения подхода к другим задачам, отличающимся геометрией, граничными условиями и т.д. Также обсуждаются результаты и нерешенные проблемы метода.
Машинное обучение, нейронные сети, структурная оптимизация, топологическая оптимизация, адаптивные материалы, pytorch, метод скользящих асимптот, simp
Короткий адрес: https://sciup.org/146282677
IDR: 146282677 | УДК: 539.3 | DOI: 10.15593/perm.mech/2023.3.01
Machine learning method in elastic plate topology optimization problems
In this article, as an alternative to traditional methods of topology optimization of deformable solids, an approach to topology optimization based on machine learning methods is proposed. The proposed approach significantly reduces the time spent on obtaining the optimal solution and allows to avoid the use of time-consuming finite element calculations at the stage of obtaining the optimal solution. All of time-consuming calculations are performed at the network training stage. A review of the world literature on the application of machine learning methods in the problem of topology optimization of an elastic deformable solid is given. Further, as an example, a square elastic plate is considered, fixed on one side and loaded with a force on the other. For a given plate, a series of topology optimization problems (maximizing stiffness under volume constraints) are solved using the method of moving asymptotes to build a training data set. A comparative study of a neural network with one custom nonlinear layer, based on the nature of the optimal topology, and a three-layer neural network built using the standard PyTorch library features is carried out. The input parameter of the neural network is the force application point, the output parameter is the optimal topology of the plate. The network is trained using the backpropagation method. The quadratic norm of the predicted design variable values deviations compared to the true values form last optimization is minimized during neural network learning. The considered example shows the possibility of applying the approach to other problems that differ in geometry, boundary conditions, etc. The results and unsolved problems of the method are also discussed.
Текст научной статьи Применение методов машинного обучения в задаче топологической оптимизации упругой пластины
Один из наиболее часто используемых сегодня методов численной оптимизации в механике деформируемого твердого тела - это метод топологической оптимизации. В классической постановке топологическая оптимизация - задача нахождения оптимального с точки зрения жесткости распределения материи в заданной области при определенных нагрузках и граничных условиях. Одним из наиболее быстро развивающихся направлений в области топологической оптимизации является использование методов машинного обучения. Литературный обзор источников позволяет выделить основные цели применения существующих методов машинного обучения в задаче топологической оптимизации: ускорение итерационной процедуры, безытера-ционная оптимизация, метамоделирование, уменьшение размерности пространства проектирования, усовершенствование оптимизатора, генеративный дизайн и постобработка.
В топологической оптимизации, как и в других классических итерационных методах, с увеличением итераций изменение переменных проектирования начинает происходить медленнее. По мере сходимости метода на последних итерациях отклонение переменных проектирования может быть пренебрежительно мало, а время, затрачиваемое на этом этапе, велико. Поэтому часть исследований посвящены использованию нейронных сетей для ускорения итерационной процедуры с помощью предсказания оптимального решения на основе промежуточного, ещё не сошедшегося решения [1-6].
В классическом подходе к топологической оптимизации на каждой итерации вычисление целевой функции, ограничений и их производных по переменным проектирования осуществляется с помощью метода конечных элементов (МКЭ). Метамоделирование предполагает вычисление этих величин с помощью нейронной сети. С помощью сверточной нейронной сети вычисляются податливость, жесткость, объемная доля [7-12]. При этом входными данными для нейронной сети является распределение фиктивной плотности на текущей итерации.
При увеличении размерности модели и ее конечноэлементного разбиения значительно увеличивается время оптимизации за счет большого количество переменных проектирования. В работах [13-24] предлагаются подходы к использованию нейронных сетей для уменьшения количества варьируемых параметров. В частности, в [20; 21] предлагается подход, который использует расширенный вариационный автоэнкодер (VAE) для кодирования 2D-топологий в скрытое пространство параметров меньшего размера и для декодирования выборок из этого пространства обратно в 2D-топологии. Топологическая оптимизация выполняется в скрытом пространстве, а не в пространстве изображений. Другим возможным способом уменьшения количества переменных проектирования является отказ от параметризации с помощью конечно-элементного разбиения и использование геометрических параметров в качестве проектных переменных. Данный подход также демонстрирует высокую эффективность [22–24].
Оптимизированные структуры зачастую имеют низкое качество, поэтому цель многих исследований стоит в том, чтобы повысить его. Нейронные сети в этом случае используются на этапе постобработки результатов оптимизации. Например, в [26–28] генерируется оптимальная структура на грубом КЭ-разбиении и нейронная сеть для повышения качества изображения. В работах [29–30] исследования посвящены постобработке границ сгенерированных изображений с оттенками серого или с нечеткими границами.
Наконец, последняя проблема, которой в последнее время уделяют большое внимание ученые, это полностью безытеративная оптимизация. Данный подход по начальной форме, граничным условиям и нагрузкам дает возможность получить оптимальную топологию конструкции с помощью нейронной сети без проведения оптимизации. Для этого используются сверточные [31–39], генеративно-состязательные [32] и условные генеративно-состязательные сети [33].
В некоторых работах авторы для обобщения этого подхода на различные граничные условия дополняют входной массив полем перемещений [34], деформаций [35] или главными напряжениями [36]. В работе [37] предложена условная генеративно-состязательная сеть (cGAN-type), на вход которой дополнительно передается плотность энергии деформации и эквивалентные по Мизесу напряжения, полученные из МКЭ.
В настоящей работе предлагается подход по использованию нейронной сети именно для безытераци-онной топологической оптимизации. Основным его отличием от предложенных ранее и описанных в литературе подходов является использование не стандартных общепринятых слоев нейронной сети, а разработка собственной высокоэффективной структуры нейронной сети, основанной на наблюдениях за характером поведения параметров проектирования в зависимости от входных параметров.
1. Топологическая оптимизация в механике деформируемого твердого тела
Задача топологической оптимизации в механике деформируемого твердого тела представляет собой поиск минимума некоторого функционала в пространстве проектирования при заданных граничных условиях и нагрузках. При оптимизации жесткости тела в качестве целевой функции выступает упругая энергия деформации пространства проектирования, имеющая следующий вид:
с =—К4 C ■■£)■■£ dQ ^ min, (1) 2Ω где 4C – тензор упругих коэффициентов, ε – тензор деформаций, Ω – материальный объём (пространство проектирования).
Параметризация пространства оптимизации выполняется за счет конечно-элементной дискретизации и применения SIMP (Solid Isotropic Material with Penalization) подхода. Свойства материала постоянны в каждом элементе и зависят величины фиктивной плотности р e , называемой фиктивной плотностью. Значения фиктивной плотности изменяются от 0 до 1, предполагается, что:
4 C e = Р Р 4 C e 0 , (2)
где 4 Ce 0 – изначальный тензор упругих коэффициентов в данном конечном элементе, р – штрафной фактор.
В качестве ограничения выступает максимально разрешенный процент использования объема пространства проектирования, выраженный следующим неравенством:
J p ( r ) d Q < V . (3)
Ω
Таким образом, задача нахождения распределения материала в рассматриваемой области проектирования в конечно-элементной постановке выглядит следующим образом:
min C (p) = fT u, ρe при ограничениях:
[ Ku = f
Ne
^eV e < V (4)
e
_ 0
Здесь C ( p ) - податливость конструкции; p - вектор проектных переменных; u – вектор узловых перемещений; f – вектор узловых нагрузок; K – матрица жесткости конструкции; Ne – количество конечных элементов; р e - фиктивная плотность e -го элемента; Ve – объем элемента; V – целевой объем;
Для решения этой задачи далее применяются методы математического программирования, в частности метод скользящих асимптот. В данной работе с помощью метода скользящих асимптот (Method of moving asymptotes – MMA) генерируется набор данных для обучения нейронной сети, и далее рассматривается возможность получения решения уже непосредственно с помощью самой нейронной сети.
2. Искусственная нейронная сеть
Искусственные нейронные сети представляют собой вычислительные модели, построенные на эмуляции процессов в нейронных структурах человеческого мозга. Классическая архитектура многослойной нейронной сети имеет входной и выходной слои. Промежуточные слои, заключенные между входным и выходным слоями, называются скрытыми. Каждый слой содержит конечное количество нейронов, в пределах одного слоя они не сообщаются между собой, но имеют связь с нейронами, принадлежащим соседним слоям. Нейрон вычисляет взвешенную сумму входных сигналов вместе с коэффициентом смещения и подает на вход в качестве аргумента нелинейной функции – функции активации. Полученное значение данной функции передается на вход нейронам, принадлежащим следующему слою.
Наиболее эффективным методом обучения многослойных нейронных сетей является метод обратного распространения ошибки. Метод обратного распространения ошибки подразумевает прямой и обратный проходы по слоям нейронной сети. Во время прямого прохода входной вектор подается на входной слой нейронной сети и передается последующим, при этом весовые коэффициенты остаются постоянными. Во время обратного прохода происходит настройка весовых коэффициентов с целью минимального расхождения прогнозируемых и фактических значений выхода. Корректировка весов осуществляется по дельтаправилу, обновленные значения весов вычисляются по следующей формуле:
wkj( n+1)=wj n ^lE-, (5) d wj где X - параметр скорости обучения, E - функция ошибки.
Качество обучения нейронной сети будет оцениваться по суммарной квадратичной ошибки, которая определяется как сумма квадратов разностей истинного и полученного значений.
1 N 1 N 2
E = 2 Е ej = 2 Е ( dj - л ) . (6)
3. Подготовка тренировочных и тестовых данных
Для демонстрации работы данного метода рассматривается изотропная квадратная упругая пластина со стороной размером 1 см. Одна из ее граней жестко закреплена, к другой грани приложена сила F = 1 кН, как показано рис. 1. Материал пластины обладает следующими характеристиками: модуль упругости E = 0,1603 МПа, коэффициент Пуассона v = 0,32.
Тренировочные данные получаются с помощью решения задачи минимизации податливости при ограничении на объёмную долю в 30 %. При этом меняется положение нагрузки вдоль правой кромки. Всего получено 30 топологий для разных точек приложения нагрузки. Для решения задачи топологической оптимизации используется метод конечных элементов (ANSYS) и метод скользящих асимптот (DS Simulia
Tosca Structure). Таким образом, формируется набор данных, состоящий из вектора, содержащего координаты силы, и матрицы, имеющей двоичное представление. Номера строк матрицы соответствуют различным точкам приложения силы, а номера столбцов – номерам элементов. Единичное значение элемента матрицы предполагает наличие структурного элемента, нулевое значение – его отсутствие.
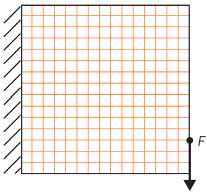
Рис. 1 Рассматриваемая геометрия
Fig. 1. 2D design domain and boundary conditions
4. Структура нейронных сетей
В данном разделе представлены архитектуры двух нейронных сетей для предсказания оптимальной топологии по заданной нагрузке на основе тренировочных данных, полученных в предыдущем пункте.
На выходе нейронной сети каждому элементу присваивается либо «0», либо «1» в зависимости от факта наличия материала в элементе. Исходя из этого, область значений аппроксимирующей функции должна быть в пределах отрезка [0;1]. При изменении положения точки приложения силы, оптимальная топология пластины меняется непрерывно, «отслеживая» положение приложенной нагрузки. Таким образом, в оптимальной конструкции выбранному конечному элементу в определенных положениях нагрузки будет соответствовать значение «1», во всех остальных положениях – «0». Значит на графике функции плотности конечного элемента в зависимости от координаты приложенной нагрузки должны наблюдаться плато, также функция должна быть способна к резкой смене монотонности
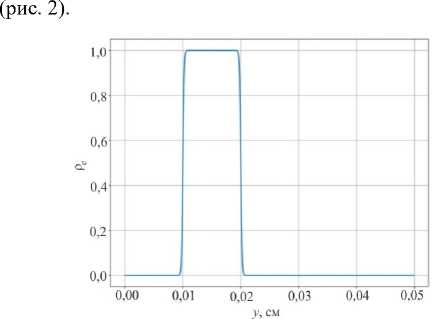
Рис. 2. Зависимость плотности в конечном элементе от положения нагрузки
Fig. 2. Element density-force coordinate graph
Данным критериям удовлетворяет сигмоида и ступенчатая функция. Но ступенчатая функция претерпевает разрыв, следовательно, она не дифференцируема во всех точках. Также ступенчатая функция имеет нулевые производные, что приводит к невозможности ее использования в методе обратного распространения, поэтому необходимо использовать ее гладкие аналоги. Для ее реализации необходимо сложить две сигмоиды с противоположными знаками, причем сигмоида с отрицательным знаком должна находиться всегда правее. Для данной задачи в силу наличия нескольких плато предлагается следующая функция:
f ( y ) i + e - a ( y - b )
1 + e - a ( y - b - c )
+--; ;---;-----r, (7)
1 + e - a ( у - n ) 1 + e - a ( у - n - t )
где a – коэффициент, отвечающий за скорость роста экспоненциальных сигмоид, b и n – параметры нейронной сети, отвечающие за смещение «ступенек», c и t – заведомо положительные параметры нейронной сети, отвечающие за ширину «ступенек»
Во время аппроксимации функцией f (y) коэффициент a не будет варьироваться. Для минимизации ошибки и наилучшей аппроксимации ступенчатой функцией требуется присвоить этому параметру достаточно большое значение.
Представленная нейронная сеть на рис. 3 содержит один нелинейный слой.
Структура второй нейронной сети изображена на рис. 4. Данная модель содержит два полносвязанных скрытых слоя и выходной слой.
Функцией активацией для скрытых слоев служит функция ReLu (рис. 5), а для выходного слоя для получения значений в пределах от 0 до 1 – экспоненциальная сигмоида (рис. 6).
На выходе полученных нейронных сетей будут представлены предсказанные вероятности нахождения элементов в зависимости от координаты приложения силы. Для получения наглядного представления данные числа округляются.

Рис. 3. Схема первой нейронной сети
Fig. 3. The architecture of single-layer neural network
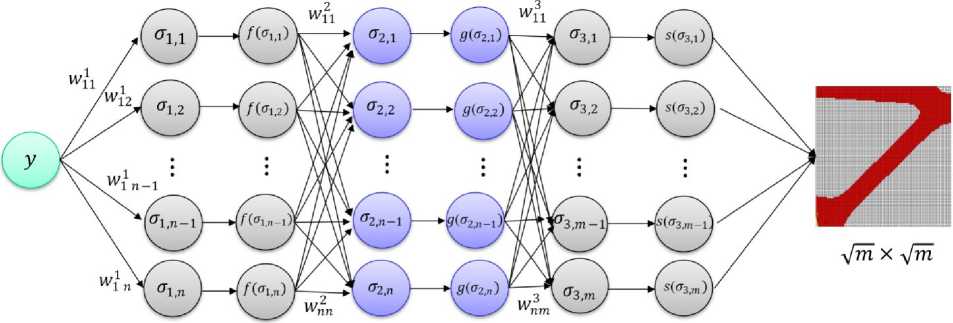
Рис. 4. Архитектура многослойной нейронной сети
Fig. 4. The architecture of multilayer neural network
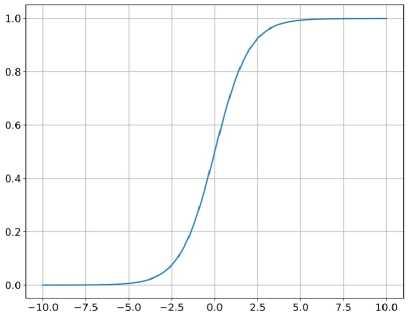
Рис. 5 ReLu
Fig. 5. ReLU function
5. Анализ результатов
Точность прогнозирования нейронной сети определяется по средней ошибке:
E av = E , (8)
n где E – суммарная среднеквадратичная ошибка по обучающей выборке, определяемая по формуле (6), n – размер обучающей выборки.
Средняя ошибка для двух разработанных нейронных сетей, полученная в результате их обучения на указанных в п.3. тренировочных данных, приведена в табл. 1.
Таблица 1
Средняя ошибка нейронной сети
Table 1
Neural network average error
|
Нейронная сеть |
Средняя ошибка |
Доля элементов с ошибкой ( N err / N e ) |
|
Однослойная |
29,85 |
0,00597 |
|
Трехслойная |
10,4 |
0,00208 |
В последнем столбце N err – среднее количество элементов с ошибкой, N e – общее количество конечных элементов.
Интерпретировать величину средней ошибки можно следующим образом – ошибка, равная N , означает, в соответствии с формулой (6), что в среднем 2 N элементов имеют конечную плотность «1» вместо «0» (или наоборот). Таким образом, величина ошибки указывает на количество элементов c ошибочной плотностью в конечной топологии. Для оценки качества работы
Рис. 6. Сигмоидальная функция
-
Fig. 6. Sigmoid function
нейронной сети это количество должно быть соотнесено с общим количеством элементов (столбец 2 табл. 1). Таким образом, однослойная нейронная сеть неправильно определяет в среднем 60 из 10 000 элементов конечноэлементной модели, а трехслойная – 20 из 10 000. Влияние данной ошибки на результаты можно увидеть на рис. 7–9, на которых показаны результаты прогноза однослойной и трехслойной нейронных сетей и сравнение этих прогнозов с решением, полученным с помощью оптимизации методом MMA. На рис. 7 приведены результаты для случая приложения нагрузки в верхней части правой кромки пластины, на рис. 8 – для случая приложения нагрузки ближе к центру кромки, на рис. 9 – для случая приложения нагрузки в нижней части кромки.
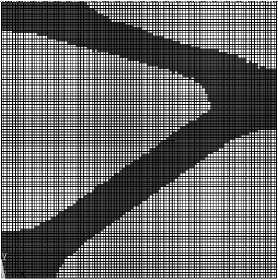
На рис. 7, а , показаны неточности вдоль верхней кромки нижнего «ребра», а на рис. 9, b , относящемуся к трехслойной нейронной сети, можно увидеть ошибку в виде нулевой плотности в элементе, расположенном на стыке двух «ребер». Эти ошибки, однако, не оказывают существенного влияния на конечную топологию и могут быть нивелированы как за счет введения дополнительных фильтров, так и за счет применения генеративно-состязательной нейронной сети, которая сможет воссоздать «изображение» без дефектов по заданному «изображению» с дефектами. Создание такое нейронной сети – одно из возможных направлений для продолжения исследований по данной теме.
Время, затраченное на получение оптимальной топологии с помощью нейросети, приведено в табл. 2. Данная таблица не включает время, затраченное на создание тренировочной выборки и обучение сети. Время обучения для однослойной нейронной сети составило 21,7 мин, а для трехслойной – 41 мин. На создание обучающей выборки было затрачено примерно 3 ч 43 мин.
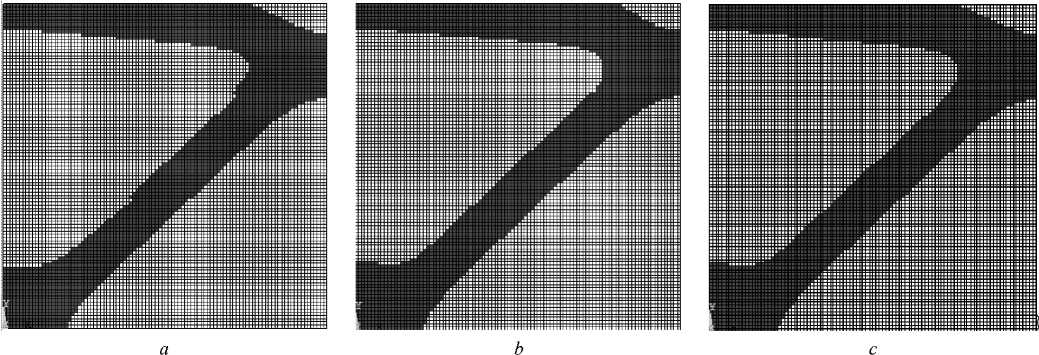
Рис. 7. Оптимальная топология для силы, приложенной в точке с координатой y = 0,805: а – прогноз однослойной нейронной сети; b – прогноз многослойной нейронной сети; c – результат оптимизации с помощью MMA
Fig. 7. Optimized designs with force applied at y = 0.805: a – prediction result of single-layer neural network; b – prediction result of multilayer neural network; c – result of MMA method
а b c
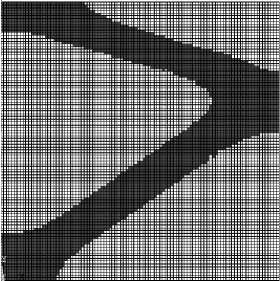
Рис. 8. Оптимальная топология для силы, приложенной в точке с координатой y = 0,625: а – прогноз однослойной нейронной сети; b – прогноз многослойной нейронной сети; c – результат оптимизации с помощью MMA
Fig. 8. Optimized designs with force applied at y = 0,625: a – prediction result of single-layer neural network; b – prediction result of multilayer neural network; c – result of MMA method
а b c
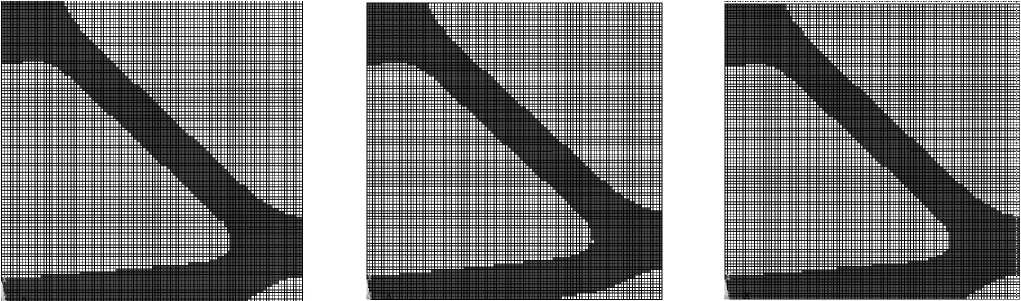
Рис. 9. Оптимальная топология для силы, приложенной в точке с координатой y = 0,185: а – прогноз однослойной нейронной сети; b – прогноз многослойной нейронной сети; с – результат оптимизации с помощью MMA
Fig. 9. Optimized designs with force applied at y = 0,185: a – prediction result of single-layer neural network; b – prediction result of multilayer neural network; c – result of MMA method
Таблица 2
Сравнение времени, требуемого на решение задачи оптимизации
Comparison of the time required to solve the optimization problem
Table 2
|
Параметр |
Однослойная нейронная сеть |
Трехслойная нейронная сеть |
Оптимизация с помощью MMA |
|
Время решения задачи оптимизации, с |
0,24 |
0,16 |
120 |
|
Занимаемая оперативная память, МБ |
23 |
29 |
788 |
Видно, что обе нейронные сети испытывают небольшие трудности при определении значений на границе модели. Поэтому, как и в обычных задачах топологической оптимизации, требуется небольшая постобработка сторонними средствами. Вторая нейронная сеть в среднем более точное решение, что неудивительно в силу более большого количества параметров.
В силу нелинейности аппроксимирующей функции в первой нейронной сети, а также наличия у нее нескольких локальных экстремумов, конечная топология зависит от начальных параметром сигмоид, однако примерную топологию возможно получить и со случайными ненулевыми параметрами. Также преимуществом этой сети является малое количество параметров по сравнению с многослойными сетями, без существенных потерь в результативности.
Заключение
В данной работе представлены две структуры нейронных сетей для безытерационого решения задачи топологической оптимизации в постановке минимизации податливости с ограничением на объем. Первая структура нейронной сети содержит один нелинейный слой, вторая структура представляет собой трехслойную нейронную сеть. Разработанные модели прекрасно
Список литературы Применение методов машинного обучения в задаче топологической оптимизации упругой пластины
- Sosnovik I, Oseledets I. Neural networks for topology optimization // Russian Journal of Numerical Analysis and Mathematical Modelling. - 2019. - Vol. 34(4). - P. 215-223.
- Saurabh Banga, Harsh Gehani, Sanket Bhilare, Sagar Pa-tel, and Levent Kara. 3D Topology Optimization using Convolu-tional Neural Networks. - Preprint, 8 2018.
- An efficient data generation method for ANN-Based surrogate models / R. Kai, T. Chao, Q. Michael, W. Wenjing // Struct Multidiscip. Optim. - 2022. - Vol 65. - P. 90. DOI: 10.1007/s00158-022-03180-6
- Kallioras N.A., Kazakis G., Lagaros N.D. Accelerated topology optimization by means of deep learning // Structural and Multidis-ciplinary Optimization. - 2020. - Vol. 62(3). - P. 1185-1212.
- Acceleration Design for Continuum Topology Optimization by Using Pix2pix Neural Network / Hong-Ling Ye, Ji-Cheng Li, Bo-Shuai Yuan, Nan Wei, Yun-Kang Sui // International Journal of Applied Mechanics. - 2021. - Vol. 13(04), no. 5. -P. 2150042. DOI: 10.1142/S1758825121500423
- Younghwan Joo, Yonggyun Yu, In Gwun Jang. Unit Module-Based Convergence Acceleration for Topology Optimization Using the Spatiotemporal Deep Neural Network // IEEE Access. - 2021. - Vol. 9. - P. 149766-149779. DOI: 10.1109/ACCESS.2021.3125014
- CNN-based image recognition for topology optimization / S. Lee, H. Kim, Q.X. Lieu, J. Lee // Knowledge-Based Systems. - 2020. - Vol. 198. - P. 105887.
- Kim C., Lee J., Yoo J. Machine learning-combined topology optimization for functionary graded composite structure design // Computer Methods in Applied Mechanics and Engineering. - 2021. - Vol. 387. - P. 114158.
- Multiscale topology optimization using neural network surrogate models / D.A. White, W.J. Arrighi, J. Kudo, S.E. Watts // Computer Methods in Applied Mechanics and Engineering. -2019. - Vol. 346. - P. 1118-1135.
- Takahashi Y., Suzuki Y., Todoroki A. Convolutional neural network-based topology optimization (cnn-to) by estimating sensitivity of compliance from material distribution // arXiv preprint arXiv. - 2001. - P. 00635.
- Qian C., Ye W. Accelerating gradient-based topology optimization design with dual-model artificial neural networks // Structural and Multidisciplinary Optimization. - 2021. -No. 63(4). - P. 1687-1707.
- Cheng Qiu, Shanyi Du, Jinglei Yang. A deep learning approach for efficient topology optimization based on the element removal strategy // Materials & Design. - 2021. - Vol. 212. -P. 110179.
- Hoyer S., Sohl-Dickstein J., Greydanus S. Neural repa-rameterization improves structural optimization // arXiv preprint arXiv. - 2019. - Vol. 1909. - P. 04240.
- TONR: An exploration for a novel way combining neural network with topology optimization / Zeyu Zhang, Yu Li, Wei-en Zhou, Xiaoqian Chen, Wen Yao, Yong Zhao // Computer Methods in Applied Mechanics and Engineering. - 2021. -Vol. 386. - P. 114083.
- Liang Chen, Mo-How Herman Shen. A New Topology Optimization Approach by Physics-Informed Deep Learning Process // Advances in Science, Technology and Engineering Systems Journal. - 2021. - No. 6(4). - P. 233-240.
- Chandrasekhar A., Suresh K. TOuNN: topology optimization using neural networks // Structural and Multidisciplinary Optimization. - 2021. - No. 63(3). - P. 1135-1149.
- Halle A., Campanile L.F., Hasse A. An Artificial Intelligence-Assisted Design Method for Topology Optimization without Pre-Optimized Training Data // Applied Sciences. - 2021. -No. 11(19). - P. 9041.
- Jonas Zehnder, Yue Li, Stelian Coros, and Bernhard Thomaszewski. NTopo: Mesh-free Topology Optimization using Implicit Neural Representations. Preprint. - 2021
- Deng H., To A.C. Topology optimization based on deep representation learning (DRL) for compliance and stress-constrained design // Computational Mechanics. - 2020. - Vol. 66. -P. 449-469.
- An Indirect Design Representation for Topology Optimization Using Variational Autoencoder and Style Transfer / Tinghao Guo, Danny J. Lohan, Ruijin Cang, Max Yi Ren, James T. Allison // 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. - Reston, Virginia, 1 2018. American Institute of Aeronautics and Astronautics. DOI: 10.2514/6.2018-0804
- Greminger M. Generative Adversarial Networks With Synthetic Training Data for Enforcing Manufacturing Constraints on Topology Optimization // Volume 11A: 46th Design Automation Conference (DAC). Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference., American Society of Mechanical Engineers, 8 2020. DOI: 10.1115/DETC2020-22399
- Machine learning-driven real-time topology optimization under moving morphable component-based framework / X. Lei, C. Liu, Z. Du, W. Zhang, X. Guo // Journal of Applied Mechanics. - 2019. - Vol. 86(1). - P. 011004.
- Data-driven geometry-based topology optimization / Van-Nam Hoang, Ngoc-Linh Nguyen, Dat Q. Tran, Quang-Viet Vu, H. Nguyen-Xuan // Structural and Multidisciplinary Optimization. -2022. - Vol. 65(2). - P. 69. DOI: 10.1007/s00158-022-03170-8
- Machine Learning based parameter tuning strategy for MMC based topology optimization / X. Jiang, H. Wang, Y. Li, K. Mo // Advances in Engineering Software. - 2020. - Vol. 149. -P. 102841.
- Lynch M.E., Sarkar S., Maute K. Machine learning to aid tuning of numerical parameters in topology optimization // Journal of Mechanical Design. - 2019. - Vol. 141(11).
- An artificial neural network approach for generating high-resolution designs from low-resolution input in topology optimization / N. Napier, S.A. Sriraman, H.T. Tran, K.A. James // Journal of mechanical design. - 2020. - Vol. 142(1).
- Deep super-resolution neural network for structural topology optimization / C. Wang, S. Yao, Z. Wang, J. Hu // Engineering Optimization. - 2021. - Vol. 53(12). - P. 2108-2121.
- Efficient, high-resolution topology optimization method based on convolutional neural networks / L. Xue, J. Liu, G. Wen, H. Wang // Frontiers of Mechanical Engineering. - 2020. -Vol. 16(1). - P. 80-96.
- Stromberg N. Efficient detailed design optimization of topology optimization concepts by using support vector machines and metamodels // Engineering Optimization. - 2020. - Vol. 52(7). -P. 1136-1148.
- Image-Based Multiresolution Topology Optimization Using Deep Disjunctive Normal Shape Model / V. Keshavarzzadeh, M. Alirezaei, T. Tasdizen, R.M. Kirby // Computer-Aided Design. - 2020. - Vol. 130. - P. 102947.
- Abueidda D.W., Koric S., Sobh N.A. Topology optimization of 2D structures with nonlinearities using deep learning // Computers & Structures. - 2020. - Vol. 237. - P. 106283.
- Sharpe C., Seepersad C.C. Topology design with conditional generative adversarial networks. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference // American Society of Mechanical Engineers. - 2019. - Vol. 59186. - P. V02AT03A062.
- Yang X., Bao D.W., Yan X. OptiGAN: Topological Optimization in Design Form-Finding with Conditional GANs // Proceedings of the 27th International Conference of the Association for Computer-Aided Architectural Design Research in Asia (CAA-DRIA) 2022. - Sydney, Australia, 9-15 April 2022.
- A deep convolutional neural network for topology optimization with strong generalization ability / Y. Zhang, B. Peng, X. Zhou, C. Xiang, D. Wang // arXiv preprint arXiv. - 1901.07761
- Accelerated topology optimization design of 3D structures based on deep learning / C. Xiang, D. Wang, Y. Pan [et al.] // Struct Multidisc Optim. - 2022. - Vol. 65. - P. 99.
- Deep learning driven real time topology optimisation based on initial stress learning / Jun Yan, Qi Zhang, Qi Xu, Zhirui Fan, Haijiang Li, Wei Sun, Guangyuan Wang // Advanced Engineering Informatics. - 2022. - Vol. 51. - P. 101472.
- Topologygan: Topology optimization using generative adversarial networks based on physical fields over the initial domain / Z. Nie, T. Lin, H. Jiang, L.B. Kara // Journal of Mechanical Design. - 2021. - Vol. 143(3).
- Baki Harish, Kandula Eswara Sai Kumar, Balaji Sriniva-san. Topology Optimization Using Convolutional Neural Network // Lecture Notes in Mechanical Engineering. - Springer, 2020. - P. 301-307.
- Ruijin Cang, Hope Yao, Yi Ren. One-shot generation of near-optimal topology through theory-driven machine learning // Computer-Aided Design. - 2019. - Vol. 109. - P.12-21.
