Применение микроконтроллера ATxmega в устройстве управления импульсным стабилизатором напряжения

Автор: Титовская Н.В., Титовский С.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 7, 2015 года.
Бесплатный доступ
В статье изложены результаты исследований по применимости микроконтроллеров в управлении импульсными стабилизаторами напряжения.
Микроконтроллер, импульсный стабилизатор напряжения, управление
Короткий адрес: https://sciup.org/14084387
IDR: 14084387 | УДК: 681.323
The application of the ATxmega micro-controller in the control unit of the pulse voltage stabilizer
The research results on the applicability of the micro-controllers in the control of the pulse voltage stabilizers are stated in the article.
Текст научной статьи Применение микроконтроллера ATxmega в устройстве управления импульсным стабилизатором напряжения
Пинт
Идиф
Up а с
Устройство управления
импульсным стабилизатором
Управление ключом
напряжения
Рис. 1. Устройство управления ИСН
УУ ИСН на уровне «черного ящика» имеет три входа и один выход (рис. 1), где Uинт – напряжение с выхода интегратора, изменяющееся в диапазоне 0÷3 В;
Uдиф – переменная (дифференциальная) составляющая выходного напряжения, изменяющаяся для статического режима работы (при неизменном сопротивлении нагрузки) в диапазоне ±20 мВ;
Uрас – напряжение рассогласования каналов (для многоканального варианта стабилизатора), изменяющееся в диапазоне 0÷3 В.
Задачей УУ является формирование выходного импульса управления ключом стабилизатора, длительность которого является функцией от входных напряжений
Тимп = F(Uинт, Uдиф, Uрас).
В результате моделирования работы стабилизатора было выявлено, что для инвертирующего интегратора наилучшие результаты получаются при использовании следующей функции [1, 2]:
Тимпi = Тп ∙ (Uинтi – (5 ∙ Uдифi – 1.5 ∙ Uдифi-1) / n – Uрасi) / Umax, где i – номер такта работы стабилизатора;
Тп – длительность такта (период) работы стабилизатора;
n – количество каналов в стабилизаторе;
Umax – условное максимальное напряжение (напряжение, при котором длительность выходного импульса совпадает с периодом).
При построении цифрового УУ аналоговые величины Uинт, Uдиф, Uрас вначале необходимо преобразовать в цифровой вид (выполнить аналого-цифровое преобразование), после чего рассчитать длительность выходного импульса и сформировать его.
Вышеизложенные соображения приводят к следующей обобщенной функциональной схеме УУ (рис. 2):
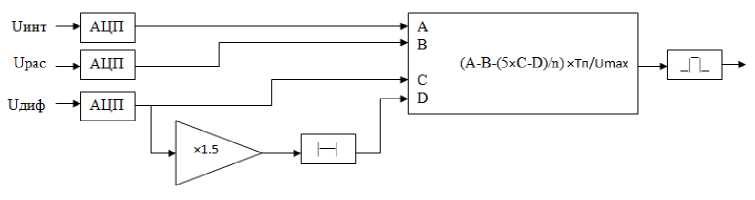
Рис. 2. Функциональная схема УУ ИСН
Для макетной реализации УУ был выбран микроконтроллер ATxmega128A1, так как он имеет в своем составе все необходимое оборудование [3, 4].
Поскольку аналоговые величины подвергаются аналого-цифровому преобразованию, в их числовом представлении имеется погрешность, связанная с квантованием (приведением значений к одному из фиксированных уровней). Эта погрешность участвует в вычислении Тимп и приводит к отклонениям от истинного значения. Фактически вычисления производятся по закону
Тимпi = Тп ∙ ((Uинтi +Δинт) – (5 (Uдифi +Δдиф) – – 1,5 ∙ (Uдифi-1+Δдиф)) / n – (Uрасi+Δрас)) / Umax, где Δинт, Δдиф, Δрас – погрешности представления Uинт, Uдиф, Uрас соответственно.
Поскольку все измерения производятся с помощью одного и того же АЦП, можно утверждать, что
Δинт = Δдиф = Δрас = Δ, где Δ – погрешность АЦП, и при n = 1 (использовании одного канала)
Тимп i = Тп ∙ {[Uинт i – (5 Uдиф i – 1,5 ∙ Uдиф i-1 ) – Uрас i ] + 8,5 ∙ Δ} / Umax.
В приведенном выражении 8,5 ∙ Δ = S – оценка погрешности, накопленной в процессе вычисления значения выражения в квадратных скобках.
Типовым значением погрешности АЦП для ATxmega является ±4 кванта, ширина которого зависит от шкалы (диапазона измеряемого напряжения) и разрядности d = ΔU/2r, где d – ширина кванта АЦП;
ΔU – ширина шкалы АЦП (разность между максимальным и минимальным значениями);
r – разрядность АЦП.
И при использовании максимальной шкалы ±3 В
Δ = ±4 ∙ (3-(-3))/212 ≈ ±5,9 (мВ).
Тогда
S = 8,5 ∙ Δ ≈ ±50 (мВ).
Из сопоставления S c диапазонами изменения входных напряжений видно, что для Uинт и Uрас погрешность S составляет не более 1,7 % и не окажет существенного влияния на формирование Тимп этими напряжениями. Для Uдиф даже с учетом увеличения в 5 раз S составит около 50 %, что не обеспечвает требуемых параметров работы стабилизатора. Данное утверждение получило экспериментальное подтверждение в ходе исследований.
Для уменьшения погрешности вычислений в схему УУ были внесены изменения: перед аналого-цифровым преобразованием с помощью встроенного усилителя АЦП Uдиф было увеличено в 8 раз, а при вычислении Тимп это усиление было скомпенсировано (рис. 3).
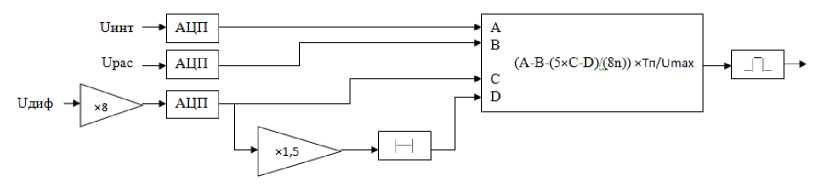
Рис. 3. Измененная схема устройства управления
Такое изменение фактически увеличивает диапазон Uдиф до ±160 мВ и приводит к вычислению длительности выходного импульса по закону
Тимп i = Тп ∙ {[Uинт i – (5 ∙ Uдиф i – 1,5 ∙ Uдиф i-1 ) /8 – Uрас i ] +
+ 2,8125 ∙ Δ} / Umax, и выражение для S примет вид
S = 2,8125 ∙ Δ ≈ ±16,5 (мВ).
Сопоставив диапазон изменения Uдиф, увеличенный в 5 раз с S, получаем погрешность на уровне 2 %, что, как показали экспериментальные исследования, является приемлемым результатом.
Собственно реализация одноканального ИСН с цифровым УУ заключается в подключении сигнала управления ключом, а также Uинт, Uдиф к соответствующим контактам микроконтроллера и организации его функционирования в соответствии со схемой, приведенной на рис. 3.
Для ослабления помех от силовых цепей сигналы Uинт, Uдиф передаются в дифференциальном виде по витой паре.
Поскольку макетный вариант стабилизатора предусматривает экспериментальную оценку максимальной частоты работы стабилизатора, был использован внешний генератор импульсов запуска (тактовых импульсов) с изменяемой частотой.
Для уменьшения влияния цифровых (импульсных) сигналов на аналоговые Uинт, Uдиф использованы контакты разных портов ввода/вывода микроконтроллера: аналоговые сигналы подключены к порту А, цифровые – к порту С (рис. 4).
|
+иинт —» |
PORTA А2 АЗ |
ATxmegal28Al |
PORTC СО |
-► Управление ключом |
|
|
+идиф |
|||||
|
-Uhht -идиф |
А4 А5 |
С7 |
«— Импульсы запуска |
||
Рис. 4. Схема включения микроконтроллера
Требуемая организация функционирования микроконтроллера реализуется с помощью программы, использующей следующую схему функционирования микроконтроллерного УУ ИСН (рис. 5).
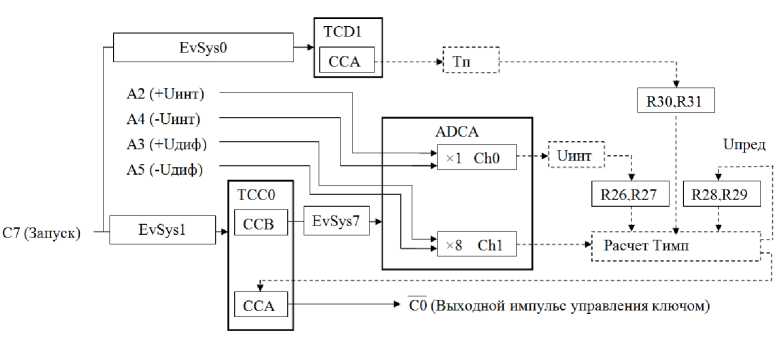
Рис. 5. Программно-аппаратная организация УУ ИСН
Все управление ИСН производится тремя основными обработчиками прерываний:
-
- прерываний от канала CCA таймера-счетчика (ТС) TCD1;
-
- обработчиком прерываний от канала Ch0 АЦП ADCA;
-
- обработчиком прерываний от канала Ch1 АЦП ADCA.
Импульс запуска с контакта C7 через канал событий EvSys0 своим передним фронтом перезапускает ТС TCD1, работающий в режиме захвата частоты (frequency capture). Одновременно канал CCA счетчика фиксирует время, прошедшее с момента предыдущего запуска, т.е. длительность периода запуска Тп и вызывает прерывание, обработчик которого помещает зафиксированную длительность периода в регистры R30, R31 процессора.
Тот же фронт импульса запуска через канал событий EvSys1 перезапускает ТС TCC0, работающий в режиме широтно-импульсной модуляции (single slope pulse width modulation). Для запуска аналого-цифрового преобразователя ADCA используется канал CCB счетчика, что позволяет задержать момент запуска АЦП по отношению к моменту коммутации ключа силовой части стабилизатора, сопровождающемуся значительными импульсными помехами.
Сигнал с выхода CCB через канал событий EvSys7 запускает АЦП, работающий в двухканальном режиме с одновременной фиксацией данных по всем каналам (synchronous sweep). По окончании преобразования данных канала Ch0 вызывается прерывание, обработчик которого помещает оцифрованное значение Uинт в регистры процессора R26, R27. После завершения преобразования данных канала Ch1 вызывается обработчик прерывания, в котором выполняется расчет Тимп на основании полученных значений Тп, Uинт, Uдиф. Поскольку используется 12-разрядный
АЦП, Umax принято равным 2047. В этом же обработчике вычисляется и помещается в R28, R29 1,5 ∙ Uдиф (Uпред), которое будет использоваться в расчетах следующего периода запуска.
В рассматриваемом варианте стабилизатора используется модуляция переднего фронта импульса управления ключом, поэтому выход С0 переведен в инверсный режим работы, и в канал CCA счетчика TCC0 в качестве длительности импульса помещается разность Тп – Тимп.
В программе имеются два дополнительных обработчика прерываний от каналов CCA и CCB ТС TCC0, не показанные на рис. 5, использующиеся в отладочных целях для контроля моментов времени появления характерных событий.
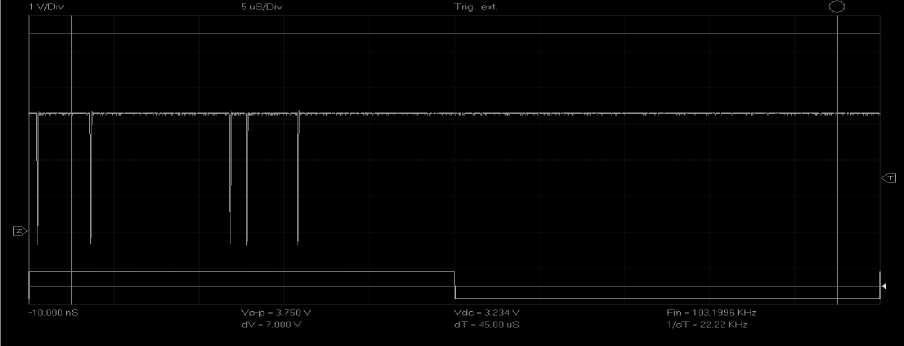
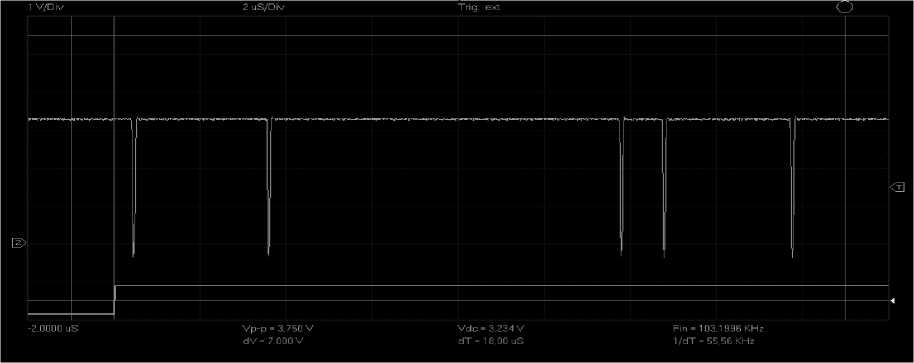
Вышеописанная реализация устройства управления стабилизатором позволила получить приемлемые результаты на частоте работы 20 КГц (Тп=50 мкс), так как оцифровка входных напряжений и расчет потребовали довольно большого времени (приблизительно 15,7 мкс). Контрольные моменты времени показаны на осциллограммах на рис. 6 короткими импульсами отрицательной полярности.
а)
б)
Рис. 6. Осциллограммы работы УУ ИСН
На рис. 6, а показан один период работы стабилизатора, на рис. 6, б – в более крупном масштабе время аналого-цифрового преобразования и расчетов.
На приведенных осциллограммах в нижней части (желтым цветом) изображены импульсы запуска стабилизатора, в верхней (зеленый луч) – пять импульсов, отмечающих следующие моменты времени (слева направо):
-
- вход в обработчик прерывания от канала CCA ТС TCD1;
-
- запуск АЦП (прерывание от канала CCB ТС TCC0);
-
- окончание оцифровки Uинт (прерывание от канала Ch0 ADCA);
-
- окончание оцифровки Uдиф (прерывание от канала Ch1 ADCA).
-
- окончание расчетов (выход из обработчика прерывания от канала Ch1 ADCA) и возможное начало выходного импульса открывания силового ключа стабилизатора (в случае его максимальной длительности).
Из них видно, что на частоте 20 КГц максимальная длительность выходного импульса не превышает 70 % от периода, и с увеличением частоты работы стабилизатора будет уменьшаться, что в свою очередь уменьшает диапазон изменения выходного тока, при котором наблюдается неизменное выходное напряжение. В выходном напряжении, формируемом таким ИСН, имеется небольшая случайная составляющая, что также является нежелательным явлением.
Заключение . Проведенное исследование показало применимость микроконтроллерного устройства управления импульсного стабилизатора напряжения в аппаратуре широкого применения с ограничением на максимальную частоту работы стабилизатора порядка 20 КГц вследствие невысокой производительности процессора, большого времени и низкого качества аналогоцифрового преобразования.
Список литературы Применение микроконтроллера ATxmega в устройстве управления импульсным стабилизатором напряжения
- Лукас В.А. Теория автоматического управления: учеб. для вузов. -М.: Недра, 1990.
- Иванчура В.И., Краснобаев Ю.В. Модульные быстродействующие стабилизаторы напряжения с ШИМ: монография. -Красноярск: ИПЦ КГТУ, 2006.
- http://catalog.gaw.ru/index.php?page=document&id=41617.
- http://catalog.gaw.ru/index.php?page=document&id=41616.
