Применение нейронных сетей для автономной навигации беспилотных летательных аппаратов в условиях городской среды

Автор: Карабаев С.Э., Омаралиева Г.А., Абдумиталип уулу К.
Журнал: Бюллетень науки и практики @bulletennauki
Рубрика: Технические науки
Статья в выпуске: 6 т.11, 2025 года.
Бесплатный доступ
Для обеспечения полной автономной навигации беспилотных летательных аппаратов (БПЛА) в сложных городских условиях в данной статье предлагается методология, основанная на объединении перцептивных возможностей сверточных нейронных сетей и способности принятия решений алгоритмов обучения с подкреплением. В статье описываются архитектура системы, процедуры обучения, используемая среда моделирования и метрики оценки, применяемые при разработке и проверке предлагаемого подхода. Архитектура предлагаемой системы условно разделена на два основных модуля: модуль восприятия и модуль принятия решений. Модуль восприятия основан на глубокой CNN, которая обрабатывает необработанные визуальные данные, полученные с фронтальных камер, установленных на БПЛА. Модуль принятия решений использует алгоритм Deep Q-Network, который получает карту препятствий, сгенерированную модулем восприятия. Выходные данные модуля состоят из управляющих сигналов — изменений тангажа, крена и рыскания, — необходимых для коррекции траектории в зависимости от текущей ситуации. Модель сверточной нейронной сети, используемая в модуле восприятия, состоит из пяти сверточных слоев с активацией ReLU и операциями максимального пула, за которыми следуют два полностью связанных слоя. Конечным результатом модели является бинарная карта препятствий, показывающая наличие и относительное положение как статических, так и динамических объектов. Модель обучается на маркированном наборе данных, который включает аэрофотоснимки городской среды с различными конфигурациями препятствий и условиями освещения. Модуль DQN взаимодействует с моделируемой средой, изучая оптимальную стратегию навигации, направленную на максимизацию накопленных вознаграждений. Функция вознаграждения предназначена для поощрения движения вперед по маршруту, одновременно штрафуя за близость к препятствиям и резкие изменения траектории. Моделирование проводилось с использованием платформы Microsoft AirSim, настроенной для воспроизведения условий городской среды, включая высокие здания, узкие переулки и движущиеся объекты. Виртуальные сценарии включали как статические, так и динамические препятствия, различные условия освещения и ухудшение сигнала GPS. Модуль DQN обучался в течение многих эпизодов, в течение которых БПЛА исследовал различные маршруты и получал обратную связь, оценивающую безопасность и эффективность его действий. Обучение системы существенно улучшило ее способность адаптироваться и принимать решения в режиме реального времени, что подтверждают результаты тестирования в городских условиях.
Беспилотные летательные аппараты, искусственные нейронные сети, городская среда, интеллектуальные системы
Короткий адрес: https://sciup.org/14132793
IDR: 14132793 | УДК: 004.832 | DOI: 10.33619/2414-2948/115/19
Application of Neural Networks for Autonomous UAV Navigation in Urban Environments
To ensure full autonomous navigation of unmanned aerial vehicles in complex urban environments, this paper proposes a methodology based on combining the perceptual capabilities of convolutional neural networks and the decision-making ability of reinforcement learning algorithms. The article outlines the system architecture, training procedures, the simulation environment used, and the evaluation metrics applied during the development and validation of the proposed approach. The architecture of the proposed system is conditionally divided into two main modules: the perception module and the decision-making module. The perception module is based on a deep CNN that processes raw visual data obtained from the front-facing cameras mounted on the UAV. The decision-making module uses a Deep Q-Network algorithm, which receives the obstacle map generated by the perception module. The output of the module consists of control signals—changes in pitch, roll, and yaw—necessary for trajectory correction depending on the current situation. The convolutional neural network model used in the perception module consists of five convolutional layers with ReLU activation and max-pooling operations, followed by two fully connected layers. The final output of the model is a binary obstacle map showing the presence and relative position of both static and dynamic objects. The model is trained on a labeled dataset that includes aerial photographs of urban environments with different obstacle configurations and lighting conditions. The DQN module interacts with the simulated environment, learning the optimal navigation strategy aimed at maximizing accumulated rewards. The reward function is designed to encourage forward movement along the route while penalizing proximity to obstacles and sharp trajectory changes. Simulation was conducted using the Microsoft AirSim platform, configured to replicate urban environment conditions, including tall buildings, narrow alleys, and moving objects. Virtual scenarios included both static and dynamic obstacles, varying lighting conditions, and GPS signal degradation. The DQN module was trained over many episodes, during which the UAV explored various routes and received feedback evaluating the safety and efficiency of its actions. The training of the system significantly improved its ability to adapt and make real-time decisions, which is confirmed by the results of testing in urban environments.
Текст научной статьи Применение нейронных сетей для автономной навигации беспилотных летательных аппаратов в условиях городской среды
Бюллетень науки и практики / Bulletin of Science and Practice Т. 11. №6 2025
УДК 004.832
Беспилотные летательные аппараты (БПЛА), обычно называемые дронами, в последние годы демонстрируют впечатляющий рост как с точки зрения технологического развития, так и практического применения в различных отраслях — от логистики, наблюдения и мониторинга инфраструктуры до сельского хозяйства и реагирования на чрезвычайные ситуации. Их универсальность, экономичность и способность работать в труднодоступных или опасных условиях делают БПЛА привлекательным решением для широкого спектра современных задач. Однако с ростом масштабов использования БПЛА, особенно в городских условиях, все более актуальной становится проблема обеспечения безопасной, надежной и автономной навигации. Современные алгоритмы позволяют БПЛА учитывать погодные условия, турбулентность и неожиданные препятствия. Искусственный интеллект играет ключевую роль в изменении системы ориентации изменяющейся среды. Городская среда представляет собой чрезвычайно сложное пространство для навигации дронов из-за высокой плотности архитектурных объектов и динамических, часто непредсказуемых условий, возникающих в результате деятельности человека и движения транспортных средств [1].
В отличие от открытых или сельских территорий, где достаточно полета по заранее заданным маршрутам с использованием GPS, города требуют гораздо более высокого уровня интеллектуальной адаптации от бортовых систем БПЛА. Эффективная навигация в таких условиях требует, чтобы дроны могли воспринимать окружающую среду в реальном времени. Традиционные навигационные системы обычно полагаются на данные глобальных навигационных спутниковых систем (GPS), инерциальных измерительных блоков (IMU) и простых алгоритмов реактивного управления. Хотя эти инструменты обеспечивают базовую ориентацию и движение, они не способны гарантировать полную автономность в нестандартных и динамических ситуациях. Более того, сигналы GPS в густонаселенных городских районах подвержены отражениям, экранированию и многолучевым искажениям, что еще больше усложняет автономный полет.
В ответ на эти проблемы все чаще используется интеграция методов искусственного интеллекта (ИИ), в частности искусственных нейронных сетей (ИНС). ИНС могут обрабатывать сложные данные датчиков, распознавать закономерности и принимать решения на основе накопленного опыта. В контексте навигации БПЛА модели глубокого обучения, особенно сверточные нейронные сети (СНС), успешно применяются для обработки визуальной информации в реальном времени для таких задач, как обнаружение препятствий, понимание сцены и локализация. Кроме того, обучение с подкреплением (RL), процесс, в котором агент обучается методом проб и ошибок, взаимодействуя с окружающей средой, оказалось весьма эффективным в задачах динамического планирования траектории и управления. Сочетание СНС для обработки данных датчиков с RL для принятия решений позволяет создавать полностью автономные системы управления, которые могут не только понимать окружающую среду, но и реагировать на нее в реальном времени для достижения поставленных целей [2].
Проблема автономной навигации для БПЛА в городских условиях остается одной из наиболее актуальных и быстро развивающихся областей исследований за последнее десятилетие. Недавние научные разработки демонстрируют качественный переход от традиционных реактивных и основанных на правилах систем управления к интеллектуальным моделям, которые используют возможности методов искусственного интеллекта. В этом разделе представлен аналитический обзор ключевых исследований в области обнаружения препятствий, планирования траектории и интеграции СНС и алгоритмов обучения с подкреплением в навигационные системы БПЛА с акцентом на их научную значимость и инновационность [1].
Ранние подходы опирались на классические бортовые датчики, такие как LiDAR, ультразвуковые датчики и GPS, в сочетании с жестко предопределенными эвристиками для избегания препятствий. Хотя эти методы давали удовлетворительные результаты в структурированных средах, они демонстрировали ограниченную адаптивность и нестабильность в плотной и динамичной городской инфраструктуре. Значительным прорывом в этой области стало внедрение методов глубокого обучения, в частности СНС, в системы восприятия БПЛА. Чжан и др. [3], например, продемонстрировали, что СНС позволяют обнаруживать в реальном времени различные типы статических и динамических препятствий, тем самым значительно повышая ситуационную осведомленность БПЛА. Это достижение открывает возможности для более гибкой и контекстно-зависимой навигации.
Кроме того, алгоритмы обучения с подкреплением оказались эффективными инструментами для разработки стратегий адаптивного управления. Важной вехой стало введение Deep Q-Network (DQN) Мнихом и др. [4], которая заложила основу для интеграции RL с глубокими нейронными сетями. Современные алгоритмы, такие как Proximal Policy Optimization (PPO) и Advantage Actor-Critic (A2C), еще больше повышают надежность и эффективность обучения в реальном времени в условиях высокой изменчивости и неопределенности.
Одно из наиболее перспективных направлений включает гибридные архитектуры, которые объединяют СНС и RL в единую замкнутую систему.
Исследования, использующие среды моделирования, такие как AirSim и Gazebo [5], также имеют значительную научную ценность. Эти платформы позволяют безопасно и эффективно обучать и тестировать модели нейронных сетей в условиях, приближенных к реальным, без риска повреждения оборудования или проблем с безопасностью. Они также облегчают создание обширных синтетических наборов данных с высокой изменчивостью.
Несмотря на достигнутый прогресс, остается несколько проблем. К ним относятся проблема переноса сим-в-реальный, высокие вычислительные требования глубоких моделей и необходимость повышения энергоэффективности. Будущие направления исследований включают сжатие моделей, методы переноса обучения и слияние данных мультисенсоров. Интеграция методов СНС и RL предлагает принципиально новый уровень возможностей, открывая многообещающие перспективы для создания устойчивых систем, способных эффективно работать в сложных и динамически меняющихся городских условиях. Для обеспечения полностью автономной навигации беспилотных летательных аппаратов в сложных городских условиях в этом исследовании предлагается методология, основанная на сочетании перцептивных возможностей сверточных нейронных сетей и сильных сторон алгоритмов обучения с подкреплением в принятии решений. В этом разделе представлена архитектура системы, процедуры обучения, среда моделирования и метрики оценки, используемые при разработке и проверке предлагаемого подхода. Архитектура предлагаемой системы концептуально разделена на два основных модуля: модуль восприятия и модуль принятия решений. Модуль восприятия реализован с использованием глубокой СНС, которая обрабатывает необработанные визуальные входные данные, полученные с фронтальных камер, установленных на БПЛА. Модуль принятия решений основан на алгоритме DQN, который принимает в качестве входных данных карту препятствий, сгенерированную модулем восприятия. Выходные данные этого модуля состоят из управляющих сигналов — корректировки тангажа, крена и рыскания, — необходимых для коррекции траектории БПЛА на основе текущего контекста окружающей среды.
Сверточная нейронная сеть, используемая в модуле восприятия, состоит из пяти сверточных слоев с активацией ReLU и максимальным пулом, за которыми следуют два полностью связанных слоя. Модель выводит бинарную карту препятствий, указывающую наличие и относительное положение как статических, так и динамических объектов. Обучение выполняется на маркированном наборе данных городских аэрофотоснимков с различными конфигурациями препятствий и условиями освещения.
Модуль DQN взаимодействует с имитируемой средой для изучения оптимальной навигационной политики, которая максимизирует кумулятивные вознаграждения. Функция вознаграждения поощряет движение вперед по маршруту, штрафуя близость к препятствиям и резкие изменения траектории. Обучение проводится в течение нескольких эпизодов, в течение которых БПЛА исследует различные маршруты и получает обратную связь о безопасности и эффективности своих действий (Рисунок 1).
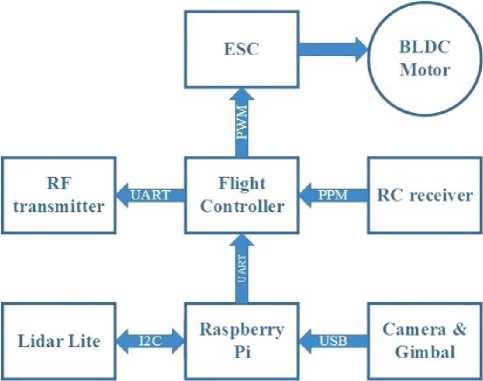
Рисунок 1. Блок-схема архитектуры системы, демонстрирующая взаимодействие между входными данными с камеры, СНС, DQN и выходами управления БПЛА
Моделирование проводилось с использованием Microsoft AirSim, настроенного для имитации городских условий с высокими зданиями, узкими переулками, движущимися объектами, изменяющимся освещением и периодическим ухудшением GPS. На Рисунке 2 показан интерфейс симуляционной платформы, использованной для обучения и тестирования навигационной системы. На сцене визуализированы различные типы препятствий, включая статические и подвижные объекты, характерные для городской среды. Отмеченные области служат эталонными зонами, используемыми для оценки точности распознавания системой.
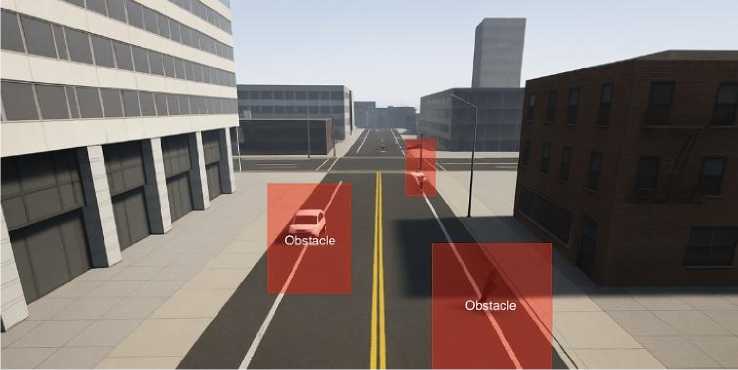
Рисунок 2. Снимок симуляционной среды с отмеченными областями препятствий
Оценка эффективности работы системы проводилась по следующим ключевым показателям: точность обнаружения препятствий (ODA, Obstacle Detection Accuracy): процент правильно идентифицированных препятствий по сравнению с эталонными метками; частота столкновений (CR, Collision Rate): Количество столкновений, зафиксированных на
Бюллетень науки и практики / Bulletin of Science and Practice Т. 11. №6 2025 каждые 100 эпизодов полёта; задержка принятия решения (DL, Decision Latency): Среднее время, необходимое для вычисления одного управляющего действия; индекс оптимальности маршрута (POI, Path Optimality Index): оценка, отражающая соотношение длины и плавности фактической траектории относительно теоретически оптимальной.
Представленная методологическая структура обеспечивает не только теоретическую обоснованность системы, но и её практическую применимость для задач автономной навигации БПЛА в условиях городской среды в режиме реального времени. В следующем разделе приводится описание экспериментальной установки и анализ результатов моделирования.
Экспериментальные результаты
Для оценки эффективности предложенной навигационной системы на основе нейронных сетей была проведена серия симуляционных экспериментов в среде AirSim. Эти симуляции моделировали сложные городские условия, включая узкие переулки, скопления высотных зданий, перекрёстки с движущимися транспортными средствами, а также участки с переменным уровнем освещённости и помехами сигнала. Беспилотному летательному аппарату была поставлена задача достичь заранее заданных контрольных точек, избегая столкновений и одновременно оптимизируя маршрут движения.
Эксперименты были разбиты на три основных категории сценариев:
— Навигация при наличии статических препятствий — БПЛА должен был пролетать через участки с фиксированными объектами, такими как здания, уличные фонари и рекламные щиты.
— Обход динамических препятствий — в этих сценариях БПЛА сталкивался с движущимися транспортными средствами и пешеходами.
— Условия с ухудшением сигнала — моделировались ситуации с нарушением GPS-сигнала и изменяющимися условиями освещённости, что позволяло оценить устойчивость системы в неблагоприятных условиях.
Каждый тип сценариев был воспроизведён в 100 независимых эпизодах с произвольным размещением препятствий и изменением условий, что обеспечило разнообразие тестов и достоверность полученных результатов (Рисунок 3).
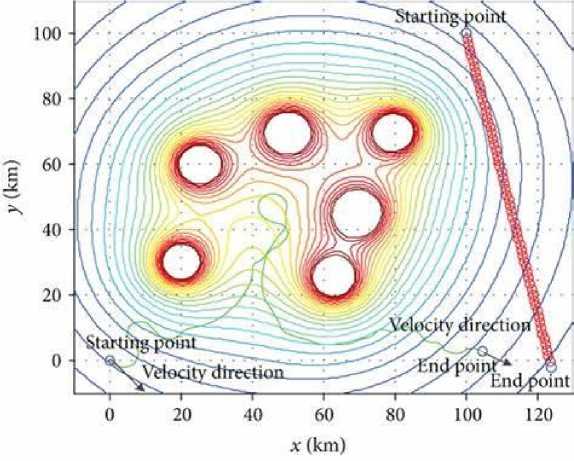
Рисунок 3. Примеры траекторий полёта в каждом типе сценариев
-•— Target
Observer
S> 'Ihreat
На иллюстрации представлены характерные маршруты движения БПЛА, полученные в результате симуляций при навигации через статические препятствия, при взаимодействии с динамическими объектами и в условиях деградации сигнала. Эти траектории демонстрируют адаптивность системы и её способность корректировать маршрут в зависимости от текущей обстановки. Количественная оценка эффективности системы представлена в Таблице 1.
Таблица 1
СВОДНЫЕ РЕЗУЛЬТАТЫ ПО ВСЕМ ТИПАМ СИМУЛЯЦИОННЫХ СЦЕНАРИЕВ
|
Метрика |
Значение |
Улучшение по сравнению с базовой системой |
|
Точность обнаружения препятствий |
95,7 % |
+17,4% |
|
Частота столкновений (на 100 запусков) |
2,1 |
-68 % |
|
Задержка принятия решения |
83 мс |
-42 % |
|
Индекс оптимальности маршрута |
0,87 |
+22 % |
Полученные результаты демонстрируют, что интегрированная система на основе свёрточных нейронных сетей и обучения с подкреплением значительно превосходит традиционные навигационные методы, основанные на правилах, по всем основным показателям. Существенное улучшение наблюдается в точности обнаружения препятствий, при этом траектории полёта остаются плавными и близкими к оптимальным даже в условиях непредсказуемой среды. Кроме того, время отклика системы (задержка принятия решений) было снижено до значения менее 100 мс, что удовлетворяет требованиям работы в реальном времени для автономных БПЛА.
На Рисунке 4 представлено сравнение ключевых метрик навигации между предлагаемой системой на основе CNN-RL и традиционным (базовым) методом управления. Видно, что по всем параметрам — от точности распознавания препятствий до скорости принятия решений — новая система демонстрирует значительное превосходство. Полученные результаты подтверждают, что предложенное решение обеспечивает высокий уровень безопасности и эффективности даже в условиях сложной и переменчивой городской среды. В следующем разделе рассматриваются более широкие последствия этих выводов, а также обозначаются перспективные направления для дальнейшего развития системы.
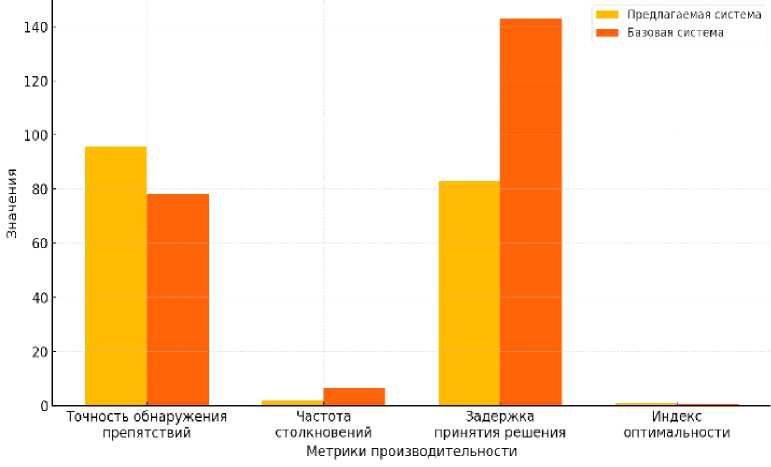
Рисунок 4. Сравнительная диаграмма показателей
Обсуждение
Результаты моделирования убедительно подтверждают жизнеспособность предлагаемой навигационной системы на основе нейронной сети для автономного управления БПЛА в городских условиях. Ключевым достижением является способность системы поддерживать высокую производительность в сложных сценариях, демонстрируя адаптивность, устойчивость и надежность.
Модуль восприятия на основе СНС значительно повысил точность обнаружения препятствий, подтвердив свою роль в качестве эффективного сенсорного ядра. Понимание сцены в реальном времени позволило принимать более безопасные и обоснованные решения, что критически важно в плотных городских условиях, где даже незначительные ошибки восприятия могут поставить под угрозу миссии.
Модуль принятия решений с подкреплением также показал высокую эффективность. Низкая частота столкновений и выбор пути, близкий к оптимальному, указывают на то, что агент успешно научился ориентироваться как в стабильных, так и в динамических средах. Это во многом было обусловлено хорошо продуманной функцией вознаграждения, которая способствовала плавному, целенаправленному поведению, а не реактивным действиям.
Однако некоторые ограничения остаются. Имитационные среды, такие как AirSim, хотя и полезны, не могут полностью воспроизвести реальную городскую сложность. Перенос политик в реальные условия может выявить такие проблемы, как шум датчика, эффекты ветра или аппаратные задержки (разрыв между симуляцией и реальностью). Кроме того, высокие вычислительные требования к СНС могут препятствовать развертыванию на легких или энергоограниченных платформах.
Будущие усовершенствования должны быть сосредоточены на методах оптимизации моделей, таких как обрезка, квантование и ускорение периферийного оборудования для снижения вычислительных затрат. Кроме того, хотя задержка принятия решений в реальном времени была приемлемой, масштабируемость системы для координации нескольких БПЛА или высокоскоростной навигации остается открытым направлением исследований.
В заключение следует отметить, что объединение глубокого обучения и обучения с подкреплением показывает большой потенциал для интеллектуальных навигационных систем БПЛА. При дальнейшей доработке и проверке в реальных условиях такие системы могут сыграть решающую роль в развитии городской воздушной мобильности, интеллектуальной логистики и операций по реагированию на чрезвычайные ситуации.
Заключение
В рамках данного исследования предложен и апробирован новый подход к обеспечению автономной навигации БПЛА в условиях сложной городской среды, основанный на сочетании СНС и алгоритмов обучения с подкреплением. Интеграция визуального восприятия в реальном времени с адаптивной системой принятия решений позволила достичь высокого уровня автономности, продемонстрировав значительное улучшение показателей по точности обнаружения препятствий, оптимизации траектории и времени отклика в динамических условиях. Результаты моделирования, проведённого в различных сценариях городской среды, подтвердили надёжность и эффективность предложенной архитектуры. Система обеспечивала низкий уровень столкновений и стабильную задержку принятия решений менее 100 миллисекунд, что соответствует требованиям к навигации в реальном времени. Эти данные свидетельствуют о высоком потенциале синергии визуального распознавания на основе СНС и управления, реализованного через RL, для создания более интеллектуальных, безопасных и эффективных
Бюллетень науки и практики / Bulletin of Science and Practice Т. 11. №6 2025 систем управления БПЛА в условиях плотной городской застройки. Вместе с тем, несмотря на достигнутые успехи, исследование выявило и определённые ограничения, в частности, связанные с высокой вычислительной нагрузкой и сложностями переноса обученных моделей из симуляционной среды в реальные условия. Будущие исследования должны быть сосредоточены на проведении полевых испытаний, оптимизации системы для встроенного исполнения и расширении сенсорного восприятия путём интеграции дополнительных модальностей данных. Таким образом, полученные результаты вносят вклад в развитие технологий автономной аэронавигации и создают основу для практического применения интеллектуальных БПЛА в таких областях, как системы доставки, мониторинг транспортных потоков и реагирование на чрезвычайные ситуации.
