ПРИМЕНЕНИЕ ПРИБОРОВ ДЛЯ РЕТРАНСЛЯЦИИ СИГНАЛОВ ПРИ ГИДРОАКУСТИЧЕСКИХ ИЗМЕРЕНИЯХ

Автор: Д. А. Костеев, А. К. Бритенков, Н. Е. Земнюков, А. В. Львов, М. Б. Салин
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Системный анализ приборов и измерительных методик
Статья в выпуске: 3, 2024 года.
Бесплатный доступ
Использование ретрансляторов при проведении гидроакустических экспериментов позволяет повысить точность измерения таких параметров, как скорость движения объекта, его сила рассеяния, потери на распространение. В работе рассмотрено применение ретранслятора со смещением частоты при излучении гидроакустических сигналов в непрерывном режиме. Опробована методика определения скорости движущегося объекта при помощи ретранслятора на основе компактного низкочастотного гидроакустического преобразователя продольно-изгибного типа со сложной формой излучающей оболочки. Показано, что предложенная методика обеспечивает модуляцию сигнала подсветки в реальном времени, а также имитацию сигналов, отражаемых крупными движущимися объектами. Результаты проведенного эксперимента соответствуют предварительным расчетам и подтверждают в рамках предложенной методики возможность использования сигналов большой длительности (в том числе и непрерывных) для акустической диагностики аномалий в морской среде.
: гидроакустика, ретрансляция сигнала, сила рассеяния, эффект Доплера, перенос спектра, пьезоэлектрический преобразователь, акустическая мощность
Короткий адрес: https://sciup.org/142242716
IDR: 142242716 | УДК: 534.6.08, 534.143, 534.4, 534.87
APPLICATION OF DEVICES FOR RELAYING SIGNALS DURING HYDROACOUSTIC MEASUREMENTS
The use of repeaters in hydroacoustic experiments makes it possible to increase the accuracy of measured parameters such as the speed of an object, its scattering force, and propagation losses. The paper discusses the use of a frequency-shifted repeater when emitting hydroacoustic signals in continuous and pulsed modes. A technique has been tested for determining the speed of a moving object using a repeater based on a compact 3D LF — a low-frequency hydroacoustic transducer of the longitudinal-bending type with a complex shape of the radiating shell. It is shown that the proposed technique provides modulation of the backlight signal in real time as well as simulation of signals reflected by large moving objects. The results of the experiments are consistent with preliminary calculations and confirm, within the framework of the proposed methodology, the possibility of using signals (including continuous signals) of various shapes for the acoustic diagnosis of anomalies in the marine environment.
Текст научной статьи ПРИМЕНЕНИЕ ПРИБОРОВ ДЛЯ РЕТРАНСЛЯЦИИ СИГНАЛОВ ПРИ ГИДРОАКУСТИЧЕСКИХ ИЗМЕРЕНИЯХ
ВВЕДЕНИЕ – поперечного сечения рассеяния уединенного
Освоение Мирового океана является одним из важнейших направлений развития человечества. Для Российской Федерации освоение морей и океанов связано главным образом с расширением направлений использования северных регионов, включая акваторию Северного Ледовитого океана [1]. С учетом сложной ледовой обстановки, увеличения перевозок по Северному морскому пути, интенсификации добычи полезных ископаемых и освоения других богатств Арктического шельфа [2] перспективным способом выполнения многих операций в этом регионе является применение необитаемых подводных аппаратов.
Гидроакустические средства являются практически единственным надежным способом для навигации под водой и дистанционного обследования морского дна. В связи с этим гидроакустические станции того или иного назначения присутствуют в составе оборудования как необитаемых, так и обитаемых подводных аппаратов, а также научно-исследовательских судов. Проведение исследований по распространению и рассеянию звука в морской среде играет важную роль в мировой науке в целом [3, 4].
При проведении морских гидроакустических исследований наиболее часто требуются измерения следующих величин:
– ослабления сигнала при прохождении от точки А до точки Б;
объекта;
– удельной величины поперечного сечения для скопления рассеивателей.
Повышение точности таких измерений в значительной степени влияет на итоговый результат. При проведении натурных гидроакустических исследований, в отличие от лабораторных экспериментов, оценка погрешности является отдельной задачей. Например, из-за слабых нестационарных неоднородностей среды при распространении звука на большие дистанции возможна существенная поправка измеряемого уровня рассеяния. Как правило, любая природная акватория содержит значительные аномалии, стратификацию по глубине и разномасштабные неоднородности. Это означает, что для контроля условий эксперимента в исследуемой области (например, в районе облака пузырьков) необходимо иметь объект c заведомо известными и довольно высокими отражательными свойствами. В случае движения исследуемого объекта, например, под влиянием ветра или течения желательно, чтобы эталонный объект двигался вместе с ним. Синхронное движение эталонного объекта вместе с исследуемым позволяет более точно ориентировать приемную систему по углу и, возможно, задержке, а также провести калибровку уровня эхосигнала.
В качестве эталонного объекта возможно применение ретранслятора или маяка-ответчика. Специфические условия экспериментов, в которых исследуется рассеяние непрерывных и квазине-прерывных сигналов, не позволяют эффективно использовать стандартные типы ответчиков, и поэтому был разработан новый тип ретранслятора, выполняющий частотное смещение сигнала. В настоящей статье описан лабораторный эксперимент, проведенный с ретранслятором, работающим с частотным сдвигом, также рассмотрена методика оценки погрешности параметров движущейся цели с применением такого ответчика.
ПРИМЕНЕНИЕ МАЯКОВ-ОТВЕТЧИКОВ
В ГИДРОАКУСТИЧЕСКИХ ИССЛЕДОВАНИЯХ
Механические решения, аналогичные применяемым в радиолокации уголковым отражателям, нерационально (а иногда и невозможно) использовать в низкочастотной гидроакустике. Габариты эффективно отражающего акустического аналога уголкового отражателя для диапазона частот 1– 2 кГц в силу требуемого волнового размера создают значительные сложности в конструктивном исполнении и, что более важно, обладают небольшим радиусом действия. В целях компактного исполнения наиболее целесообразным является использование электронных устройств, содержащих приемный и передающий акустические тракты.
Одним из способов, позволяющих повысить точность проводимых измерений, а также оценить погрешности, является применение ретрансляторов. Гидроакустический ретранслятор — прибор, который после регистрации акустического сигнала либо повторяет его без изменения основных характеристик, либо излучает с некоторой заранее заданной корректировкой. В простейшем случае прибор передает звуковой сигнал установленного типа в ответ на пришедший импульс другого установленного типа и называется маяком-ответчиком. Маяки-ответчики используются для навигации подводных аппаратов [5] или для маркировки подводного оборудования для облегчения поисковых работ в случае потери или аварии [6]. Более сложные системы активно применяются при создании линий связи и управления [7, 8], а также в качестве имитаторов цели при исследовании эффективности гидролокаторов [9, 10]. Современные ретрансляторы, оснащенные цифровыми сигнальными процессорами, способны не только переиз-лучать принятый сигнал, но и анализировать его параметры, проводить регистрацию данных, передавать сигнал с выбранной задержкой по времени и с заданным смещением по частоте.
К приборам такого типа традиционно предъявляются взаимопротиворечащие требования о повышении длительности автономной работы и увеличении акустической мощности излучаемых сигналов. Для удовлетворения таких требований в состав прибора должен входить излучатель с высокой чувствительностью и КПД [11, 12] вместе с энергоэффективным трактом его возбуждения. Как правило, основной проблемой при разработке такого маяка-ответчика является создание компактных низкочастотных гидроакустических излучателей (НЧИ) высокой удельной мощности [13].
При проведении научных исследований к ответчику предъявляются несколько иные требования, поскольку основная задача прибора — точное воспроизведение формы пришедшего сигнала и обеспечение заданного коэффициента усиления по амплитуде. Размещение такой системы вблизи объекта исследования (или непосредственно на нем) позволяет измерять потери на распространение с заданной точностью, в том числе с учетом эффекта многолучевости и мультипликативных (реверберационных) помех. На основе анализа принятого ретранслятором прямого сигнала, считая сигнал ретранслятора эталонным, возможно проводить оценку изменчивости среды и точности измерения уровней рассеяния, например, поверхностной реверберации [14].
Очевидно, что в устройстве, выполняющем одновременно передачу и прием сигналов, необходимо исключать самовозбуждение. Для обеспечения устойчивого режима классический ретранслятор повторяет пришедший сигнал с небольшой задержкой, при этом определяя по заранее установленному порогу момент времени, начиная с которого начинается запись поступающего сигнала в буфер и запускается отсчет на излучение. Во время работы такого ретранслятора в режиме излучения прием сигналов приостанавливается.
Следует отметить, что для импульсов большой длительности или непрерывных сигналов их передача ретранслятором на частоте принятого сигнала с задержкой практически исключена, т.к. прибор не сможет начать излучение до окончания исходной посылки. Тем не менее использование таких сигналов не является экзотикой. Так, в работе [15] предложена методика измерения сечения рассеяния сложных тел под водой в режиме непрерывного излучения. В работах [16, 17] для диагностики поверхностного волнения и подводных течений применяются низкочастотные тональные импульсы длительностью от 2 до 8 с.
Решением, которое позволяет применять ретрансляторы в сценариях, связанных с квазине-прерывным излучением, является переизлучение сигнала со сдвигом частоты. В таком случае одновременно с приемом осуществляется излучение в соседнем частотном диапазоне относительно полосы принимаемого сигнала, что позволяет обеспечить непрерывный режим работы. Частотные полосы приема и передачи должны быть разнесены, чтобы излучающий тракт не влиял на приемный, но при этом находился достаточно близко, чтобы физические процессы распространения звука в этих диапазонах можно было считать идентичными.
РЕТРАНСЛЯТОР С ВРЕМЕННÓЙ ЗАДЕРЖКОЙ
Классические ретрансляторы, использующие временнýю задержку, хорошо работают при зондировании короткими импульсами. Ретранслятор с временнóй задержкой предназначен для ретрансляции сигналов, приходящих от внешних систем. На рис. 1, а, представлена осциллограмма гидроакустического сигнала, регистрируемого приемным элементом такого ретранслятора, включающая пакет из трех импульсов длительностью по 3 мс с периодом 600 мс и трех переизлученных импульсов с задержкой 250 мс для каждого, а на рис. 1, б, — сонограмма принимаемого и ретранслируемого импульсов.
Используемый в экспериментах прибор имеет несколько режимов работы: маяк, маяк-ответчик, ретранслятор с временнóй задержкой. Частота дискретизации входного АЦП ретранслятора составляет 24414 Гц. Управление осуществляется с ноутбука по LAN-кабелю с использованием протокола Ethernet через внешнее установленное программное обеспечение. Формирование и обработка гидроакустических сигналов выполняются во внутреннем аппаратном блоке ретранслятора, а обработка данных, формирование сигналов и функции управления производятся при помощи модуля NUCLEO-H743ZI.
РЕТРАНСЛЯТОР С ЧАСТОТНЫМ СМЕЩЕНИЕМ
Для проведения описанных во введении экспериментов с непрерывными сигналами на базе сигнального процессора ADAU1701 разработан ретранслятор с частотной перестройкой. Структурная схема алгоритма, реализованного в сигнальном процессоре, представлена на рис. 2.
Принимаемый гидрофоном сигнал после гетеродинирования и прохождения полосового фильтра в полосе f 0 ± Δ f поступает на блок быстрого преобразования Фурье (БПФ), после чего его спектр сдвигается на величину Df и с заданным коэффициентом k преобразования единиц АЦП в единицы ЦАП передается на излучающий тракт. Такой ретранслятор был настроен на работу в двух частотных диапазонах: 1800 и 2000 ±25 Гц для принимаемого и 1600 и 2200 ±25 Гц для излучаемого сигналов соответственно. Прибор работает в непрерывном режиме, т.е. переизлучает сигнал любой амплитуды в выбранном диапазоне с пропорциональным усилением (ослаблением) по мощности.
а
б
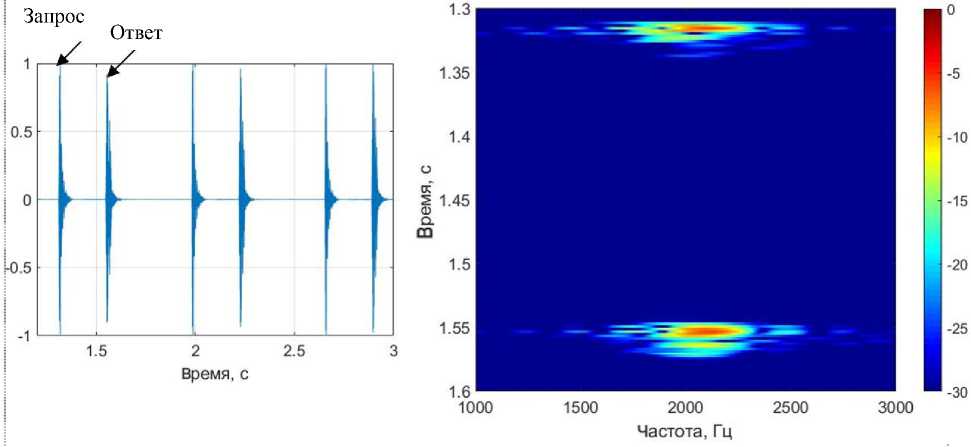
Рис. 1. Осциллограмма сигналов, регистрируемых приемным элементом ретранслятора, (а) и сонограмма принимаемого и ретранслируемого импульсов (б)
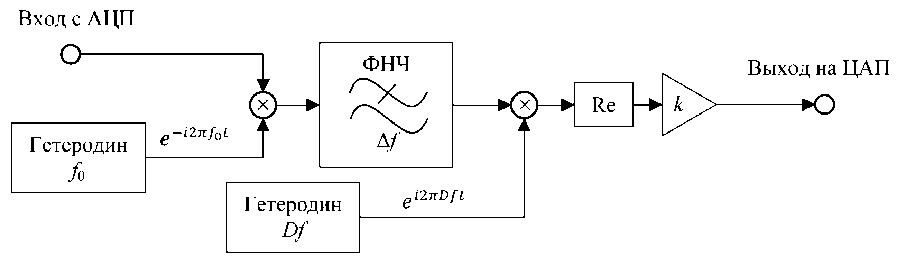
Рис. 2. Структурная схема алгоритма работы ретранслятора
К недостаткам такого устройства можно отнести клиппирование при поступлении с гидрофона сигнала с амплитудой, превышающей максимально допустимый входной уровень АЦП.
Схема эксперимента разработана с учетом возможности применения ретранслятора такого типа на движущихся объектах и размеров акустического бассейна 3 × 4 × 3 м с заглушенными стенками (рис. 3).
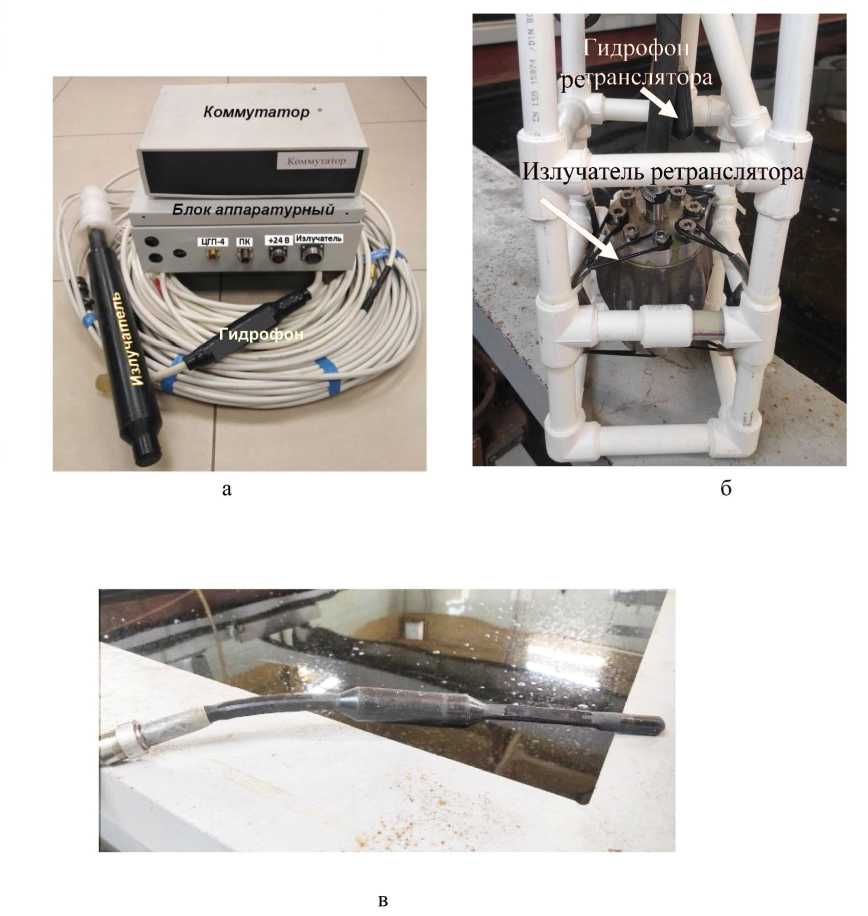
На удалении от стенки бассейна и глубине 1 м размещалась приемо-передающая система П (Приложение, рис. П, а), на противоположной стенке у поверхности воды — цифровой контрольный гидрофон Г (рис. 3). Ретранслятор Р (Приложение, рис. П, б) устанавливался на нижней оконечности штанги с шарнирно закрепленным верхним кон-
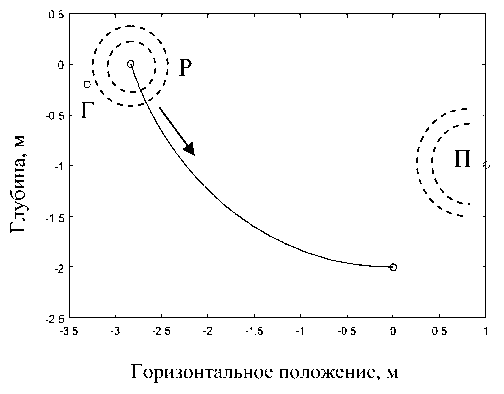
Рис. 3. Вид сбоку схемы расположения ретранслятора и контрольной аппаратуры в гидроакустическом бассейне.
Р — погружной модуль ретранслятора; Г — контрольный гидрофон; П — контрольная приемопередающая система: излучатель, гидрофон, коммутатор и аппаратурный блок цом. Ретранслятор, как маятник, перемещался по дуге окружности с радиусом 3 м, находясь в стартовом положении рядом с гидрофоном Г (Приложение, рис. П, в).
Во время проведения эксперимента приемопередающая система излучала непрерывный тональный сигнал на частоте 2.0 кГц, принимаемый ретранслятором с переизлучением его на частоте 2.2 кГц. При помощи цифрового гидрофона сигнал фиксировался регистратором приемо-передающей системы. Аналогичная процедура проводилась для сигнала на частоте 1.8 кГц с переизлучением на частоте 1.6 кГц. В качестве излучателя ретранслятора использовался компактный низкочастотный гидроакустический излучатель продольно-изгибного типа со сложной формой излучающей оболочки 3D НЧИ [18], закрепленный в эластичном подвесе на полипропиленовой ферме. Частота основного резонанса такого 3D НЧИ составляет примерно 1.7 кГц при относительной ширине рабочей полосы частот 15%.
Осциллограммы сигналов, принятых в точке Г контрольным гидрофоном, для обеих частот представлены на рис. 4, а, и 4, в, а спектры этих сигналов, нормированные по уровню возбуждающего сигнала, — на рис. 4, б, и 4, г.
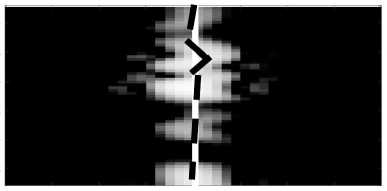
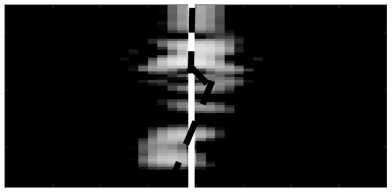
В частотном диапазоне 1.6 кГц ретранслятор принимал сигналы на частоте 1.8 кГц с переносом спектра вниз и переизлучением на частоте 1.6 кГц, а в диапазоне 2.2 кГц принятые сигналы на частоте 2.0 кГц переносились по спектру вверх и пере-излучение осуществлялось на частоте 2.2 кГц. Сонограммы принятых сигналов со смещением частоты ( f ± Df , где Df составляла 0.2 кГц) в точках Г и П приведены на рис. 5.
Черным пунктиром на графиках показана частота с учетом доплеровского смещения, определенная по максимуму полученной спектральной плотности мощности, белой линией — частотное смещение в предположении прямолинейного движения. Горизонтальные линии на рис. 5, б, и 5, г,
а
время, с Время,
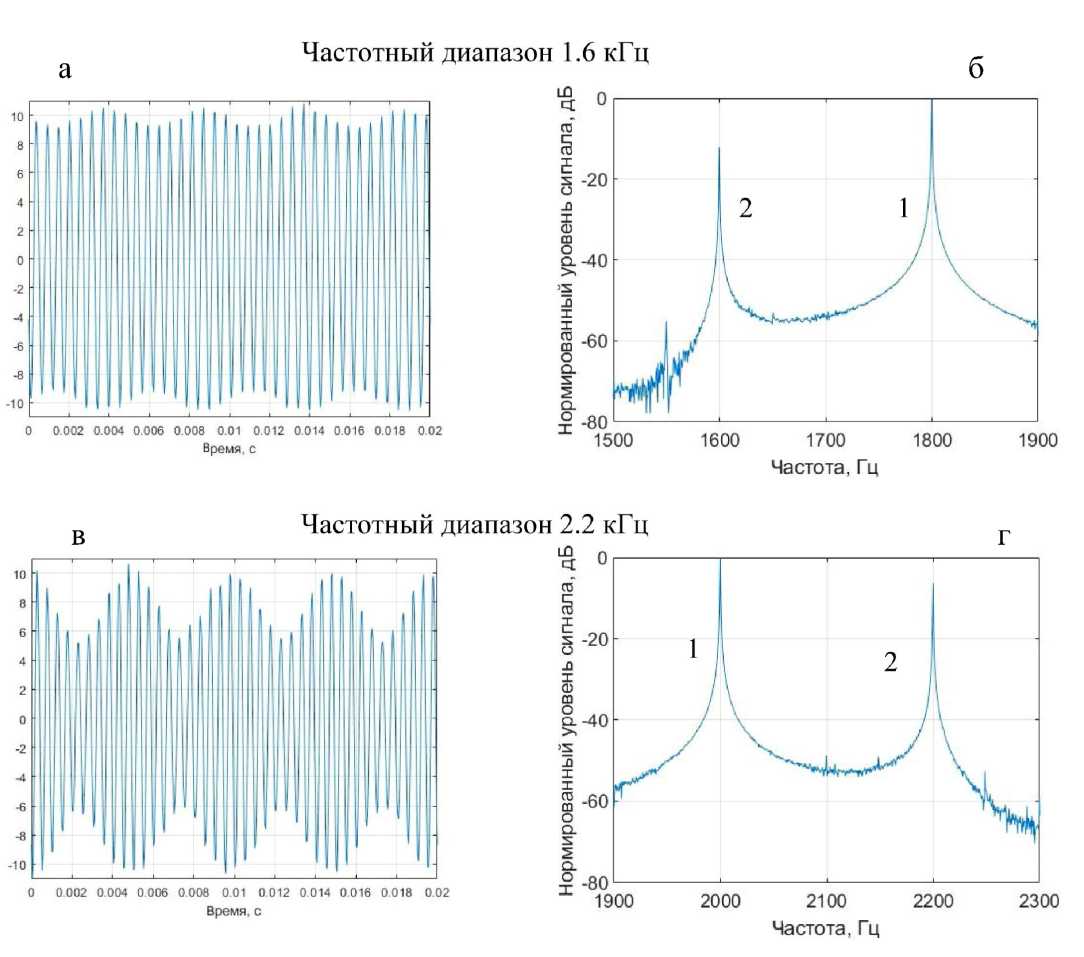
Рис. 4. Осциллограммы сигналов, принятых контрольным гидрофоном, в частотных диапазонах 1.6 кГц (а) и 2.2 кГц (в) и их нормированные спектры для диапазонов 1.6 кГц (б) и 2.2 кГц (г). Цифрами на спектрах (в) и (г) обозначены: 1 — сигнал возбуждения, 2 — сигнал ретранслятора
Частотный
Частота, Гц
-2
в
Частотный
-2
Частота, Гц
ф
ф
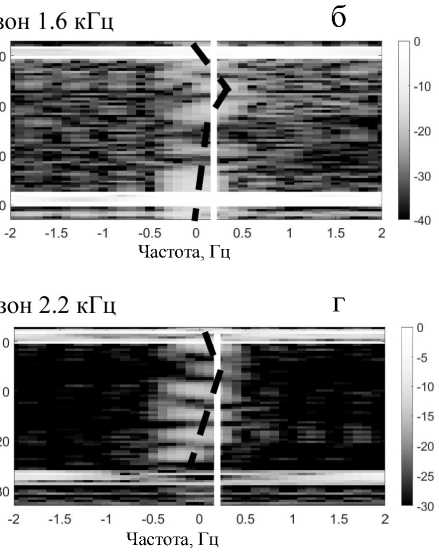
Рис. 5. Сонограммы переизлучае-мых ретранслятором сигналов на смещенной частоте f – Df для частотного диапазона 1.6 кГц в точках Г (а) и П (б) и на смещенной частоте f + Df для частотного диапазона 2.2 кГц в точках Г (в) и П (г)
обозначают метки, соответствующие началу и концу движения ретранслятора. Ломаный характер пунктирных кривых объясняется криволинейным характером движения ретранслятора, а прерывистость спектра переизлученного сигнала — высокой чувствительностью гидрофона ретранслятора, переходящего в режим перегрузки из-за гидродинамического шума при движении.
МЕТРОЛОГИЧЕСКИЕ АСПЕКТЫ ПРИМЕНЕНИЯ РЕТРАНСЛЯТОРА
Поскольку каждый из разработанных приборов (выполняющий временнýю задержку и реализующий частотный сдвиг) содержит два электроакустических преобразователя и два тракта — входной и выходной, — перед проведением измерений необходима калибровка системы. Главной величиной, которая характеризует работу ретранслятора, является коэффициент усиления (КУ), выражаемый через соотношение
КУ= p 2 , (1)
p 1
где p 1 — амплитуда акустического давления пришедшей волны, p 2 — амплитуда акустического давления излученной волны, приведенного к 1 м. Требуемое значение КУ достигается регулировкой в аналоговой части схемы (во входном предварительном усилителе гидрофона и усилителе мощности системы возбуждения излучателя), а также заданием числового параметра, который связывает единицы АЦП с единицами ЦАП в программе сигнального процессора. Калибровка КУ ретранслятора выполняется с помощью технологической установки, схема которой приведена на рис. 6.
Схема включает задающий излучатель Из, контрольный гидрофон Гк и части испытуемого ретранслятора: излучатель Ир и гидрофон Гр. Все погружные части расположены в вершинах квадрата со стороной 1 м, учитывая, что калибровка проводится в акустическом бассейне или достаточно глубоком водоеме. Во время калибровки задающий излучатель генерирует сигналы в рабочем диапазоне частот. Если калибруется ретранслятор с временнóй задержкой, то импульсы должны быть длительностью менее 0.5 мс. Во время калибровки ретранслятора с частотным сдвигом возможно применение непрерывных синусоидальных сигналов. Ввиду равных расстояний в приближении свободного пространства можно считать, что амплитуда излучаемого Из сигнала p1, принимаемого гидрофоном Гр, равна амплитуде сигнала p1′, поступающего от того же источника на гидрофон Гк. Тогда с помощью имеющихся средств регулировки амплитуда излучаемого ретранслятором сигнала в точке Гк устанавливается на уровне p2=КУ∗ ⋅ p1′, (2)
где КУ* — требуемый коэффициент усиления.
В данной схеме p 1 ′ и p 2 измеряются одним и тем же контрольным гидрофоном из технологической установки. Поскольку при таком методе измерений для гидрофона (вместе с трактом усиления и средством индикации) достаточно возможности измерения относительных величин, то к нему не предъявляются требования поверки или эталона давления. Это значительно упрощает метрологическое обеспечение работ с ретранслятором в целом и его калибровку в частности.
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
Эксперимент показал, что разработанный ретранслятор действительно может работать в непрерывном режиме и отрабатывать модуляцию сигнала подсветки в реальном времени. Во-вторых, такой ретранслятор обеспечивает имитацию сигнала, который мог бы отражаться от крупного движущегося объекта.
Электронный блок ретранслятора
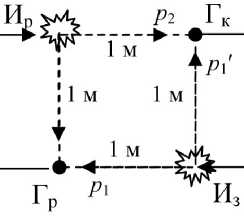
Рис. 6. Схема калибровки ретранслятора
Частота Доплера отраженного сигнала зависит как от проекции скорости на направление падающей волны, так и от проекции на направление отраженной волны. Прием осуществляется во множестве точек, и каждая из них характеризуется своим направление рассеяния и своей частотой Доплера принятого сигнала. Подвижный маяк-ответчик мог бы имитировать поправку за счет эффекта Доплера для обратного рассеяния, но не целиком для трехмерного случая, как в случае описанных экспериментов. Сравнивая рис. 5, а, с рис. 5, б (а также рис. 5, в, с рис. 5, г), можно убедиться, что в точках Г и П частотная модуляция ретранслированного сигнала различается. В соответствии с выбранной таким образом геометрией эксперимента, в точке П (рис. 3, а) наблюдается вызванное эффектом Доплера двойное смещение частоты, убывая в точке Г практически до нуля. Полученные значения частоты Доплера с учетом криволинейности движения и аппаратной точности повторяют расчетные.
ЗАКЛЮЧЕНИЕ
Представленная в работе методика применения гидроакустических ретрансляторов в научных экспериментах может использоваться в задачах изучения слоев рассеяния звука в океане. Рассматриваемый принцип построения ретрансляторов сигнала позволяет избежать нежелательной обратной связи, обеспечивая устойчивость такой системы переносом спектра для переизлучаемого сигнала на другой частоте. Предложенный метод с перестраиваемой частотой позволяет использовать сигналы различной формы, в том числе непрерывные, что с успехом может применяться для акустической диагностики разномасштабных природных аномалий в морской среде, таких как пузырьковые струи, мезомасштабные неоднородности течения и волнения. В рамках развития описанной методики возможно расширение диапазона скоростей движения объекта с установленным ретранслятором при использовании методов подавления гидродинамических помех на приемном элементе.
ПРИЛОЖЕНИЕ
Излучатель ретранслятора!
^аратурный
"идрофон ранслята
Коммутатор
Рис. П. Аппаратура эксперимента.
а — контрольная приемо-передающая система: излучатель, гидрофон, коммутатор и аппаратурный блок (П на рис. 3); б — погружной модуль ретранслятора Р; в — контрольный гидрофон Г
Грантовая поддержка
Подготовка 3D НЧИ к работе в составе ретранслятора выполнена в рамках государственного задания ИПФ РАН по проекту FFUF-2024-0041.
В части создания и испытания приборов исследования проводились в соответствии с государственным заданием ИПФ РАН по проекту FFUF-2024-0040.
В части оценок применимости приборов к задачам диагностики среды работа выполнена при поддержке гранта РНФ № 20-77-10081.
Список литературы ПРИМЕНЕНИЕ ПРИБОРОВ ДЛЯ РЕТРАНСЛЯЦИИ СИГНАЛОВ ПРИ ГИДРОАКУСТИЧЕСКИХ ИЗМЕРЕНИЯХ
- 1. Указ Президента Российской Федерации от 26.10.2020 № 645 "О стратегии развития Арктической зоны Российской Федерации и обеспечения национальной безопасности на период до 2035 года". URL: https://base.garant.ru/74810556/
- 2. Кобылкин Д.Н. Ресурсы арктического шельфа — это наш стратегический запас // Энергетическая политика. 14.11.2019. URL: https://energypolicy.ru/resursyarkticheskogo-shelfa-eto-nash/business/2019/22/14/
- 3. Yamoaka H., Kaneko А., Park J.-H., Zheng H., Gohda N., Takano T., Zhu X.H., Takasugi Y. Coastal acoustic tomography system and its field application // IEEE J. Ocean. Eng. 2002. Vol. 27, no. 2. Р. 283–295. DOI: 10.1109/JOE.2002.1002483
- 4. Munk W. Acoustic thermometry of ocean climate (ATOC) // J. Acoust. Soc. Am. 1999. Vol. 105, no. 2. Id. 982. DOI: 10.1121/1.425359
- 5. Богданович М.Л., Бородин М.А., Коваленко Ю.А., Хаметов Р.К. Возможность уточнения координат подводного аппарата в навигационном поле навигационных маяков с использованием данных от его инерциальной навигационной системы // Гидроакустика. 2020. № 44, № 4. С. 37–44. URL: https://oceanpribor.ru/docs/SbGA44.pdf
- 6. Каралюн В.Ю. Гидроакустический маяк-ответчик. Патент RU 2125733 C1, 27.01.1999. URL: https://patents.google.com/patent/RU2125733C1/ru
- 7. Миронов А.С., Габов В.С. Применение микропроцессора с гетерогенной архитектурой при реализации информационно-управляющей системы гидроакустического маяка // SCIENCE PROSPECTS. 2022. № 4 (151). С. 26–31. URL: https://elibrary.ru/item.asp?id=49162453
- 8. Филиппов Б.И., Рудковский А.А. Проектирование ретрансляционной линии гидроакустического канала связи // Сборник научных трудов НГТУ. 2017. № 4 (90). С. 77–96. DOI: 10.17212/2307-6879-2017-4-77-96
- 9. Murphy S.M., Scrutton J.G.E., Paul C. Hines Experimental Implementation of an Echo Repeater for Continuous Active Sonar // IEEE Journal of Oceanic Engineering. 2017. Vol. 42, no. 2. P. 289–297. DOI: 10.1109/JOE.2016.2595380
- 10. Bates J.R., Hines P.C., Canepa G., Tesei A., Ferri G., LePage K.D. Doppler estimates for large timebandwidthproducts using linear fm active sonar pulses // UACE2017 — 4th Underwater Acoustics Conference and Exhibition. P. 169–176. URL: https://www.uaconferences.org/docs/UACE2017_Papers/169_UACE2017.pdf
- 11. Андреев М.Я., Боголюбов Б.Н., Клюшин В.В., Рубанов И.Л. Низкочастотный малогабаритный продольноизгибный электроакустический преобразователь // Датчики и системы. 2010. № 12. С. 51–55. URL: https://sensors-and-systems.ru/issues/148
- 12. Боголюбов Б.Н., Кирсанов А.В., Леонов И.И., Смирнов C.А., Фарфель В.А.Расчет и экспериментальные исследования компактного продольно-изгибного гидроакустического преобразователя с центральной частотой излучения 520 Гц // Гидроакустика. 2015. № 23(3). C. 20–26. URL: https://elibrary.ru/item.asp?id=30598910
- 13. Бритенков А.К., Фарфель В.А., Боголюбов Б.Н. Сравнительный анализ электроакустических характеристик компактных низкочастотных гидроакустических излучателей высокой удельной мощности // Прикладная физика. 2021. № 3. С. 72–77. DOI: 10.51368/1996- 0948-2021-3-72-77
- 14. Салин М.Б., Ермошкин А.В., Разумов Д.Д., Салин Б.М. Модели формирования доплеровского спектра поверхностной реверберации для звуковых волн метрового диапазона // Акустический журнал. 2023. Т. 69. № 5. С. 595–607.
- 15. Салин Б.М., Кемарская О.Н., Салин М.Б. "Ближнепольное" измерение характеристик рассеяния движущегося объекта, основанное на доплеровской фильтрации сигнала // Акустический журнал. 2010. Т. 56, № 6. С. 802–812. URL: https://elibrary.ru/item.asp?id=15524483
- 16. Ermoshkin A.V., Kosteev D.A., Ponomarenko A.A., Razumov D.A., Salin M.B. Surface Waves Prediction Based on
- Long-Range Acoustic Backscattering in a Mid-Frequency Range // J. Mar. Sci. Eng. 2022. Vol. 10, no. 6. Id. 722. DOI: 10.3390/jmse10060722
- 17. Ermoshkin A.V., Kapustin I.A., Kosteev D.A., Ponomarenko A.A., Razumov D.D., Salin M.B. Monitoring Sea Currents with Midrange Acoustic Backscattering // Water. 2023. Vol. 15, no. 11. Id. 2016. DOI: 10.3390/w15112016
- 18. Бритенков А.К., Норкин М.С., Стуленков А.В., Травин Р.В. Исследование электроакустических характеристик компактного 3D НЧИ – низкочастотного гидроакустического преобразователя продольноизгибного типа сложной формы // Научное приборостроение. 2023. Т. 33, № 4. С. 28–39. URL: http://iairas.ru/mag/2023/abst4.php#abst2
