Применение шумоподобных сигналов при дистанционном управлении радиостанцией по каналам дальней связи

Автор: Назаров С.Н., Пятаков А.И.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии радиосвязи, радиовещания и телевидения
Статья в выпуске: 4 т.8, 2010 года.
Бесплатный доступ
В работе проанализированы пути решения проблемы нехватки пропускной способности в радиосетях декаметрового диапазона, в том числе и военного назначения. Настоящая работа посвящена разработке алгоритма функционирования адаптивных систем радиосвязи с одновременной передачей в одном канале информационных сообщений и команд управления режимами работы радиостанции, а также методике оценки параметров шумоподобных сигналов, используемых для переноса команд управления. Предлагается для увеличения пропускной способности канала служебную информацию, управляющую режимами работы радиостанции, передавать не вперемешку с информационными блоками, а одновременно, в общей полосе канала. Для переноса служебной информации использовать шумоподобные широкополосные сигналы.
Команда управления, спектральная плотность сигнала, уровень шума
Короткий адрес: https://sciup.org/140191438
IDR: 140191438 | УДК: 65.021.56
Application of broadband signals at the remote management of the radio set on long distance channels
In work ways of the decision of a problem of shortage of transmission capacity to radio networks of a decameter range, including military-oriented are analyzed. The present work is devoted development of algorithm of performance of the adaptive radio communication systems with simultaneous transmission to one channel of reports of information and control instructions mode of operations a radio set, and also a procedure of an estimation of parameters broadband the signals used for carrying over of control instructions. It is offered, for magnifying of transmission capacity of the channel, a service information operating mode of operations by a radio set to transmit not mixed up with information blocks, and simultaneously, in a common strip of the channel. For service information carrying over to use broadband signals.
Текст научной статьи Применение шумоподобных сигналов при дистанционном управлении радиостанцией по каналам дальней связи
При использовании радиостанции в режиме приема и передачи информации от ПЭВМ возникает необходимость дистанционного управления ее режимами работы, скоростью передачи, мощностью излучения, что требует принятия определенных технических решений по разработке специальных алгоритмов управления как сопрягаемой, так и удаленной радио-станцией.
Предложено несколько способов дистанционного управления радиостанцией, однако все они требуют использования дополнительных канальных или временных ресурсов, так как передача команд управления ведется либо по отдельно выделенной линии дистанционного управления, либо в составе информационного канала, но при этом связана с прерыванием обмена оперативной информацией между корреспондентами, а следовательно, с неминуемыми перерывами связи [1].
В работе предлагается один из путей решения проблемы, основанный на передаче в общей полосе полезного сигнала и команд управления. Это возможно, если в качестве команд управления использовать шумоподобные сигналы. Корреляционная функция и спектр плотности этих сигналов близки к аналогичным характеристикам квазибелого шума. Шумоподобные сигналы относятся к классу сложных сигналов, база которых B = 2FT»\.
Анализ использования шумоподобных сигналов в технике радиосвязи
В работе [1] предлагается передавать в общей полосе канала связи информационные сигналы и синхронизирующую последовательность. Можно развить эту идею и передавать вместо синхронизирующей последовательности смысловую информацию, в частности, команды управления режимами работы радиостанции.
Для получения шумоподобных сигналов предлагается использовать технологию уширения спектра (Spread Spectrum, SS) [2]. Данная технология подразумевает, что первоначально узкополосный (в смысле ширины спектра) служебный сигнал при передаче преобразуется таким образом, что его спектр оказывается значительно шире спектра первоначального сигнала, то есть спектр сигнала как бы «размазывается» по частотному диапазону (см. рис. 1).
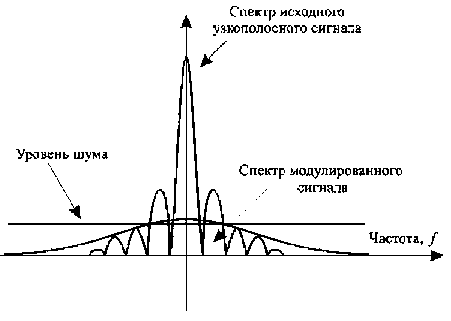
Рис. 1. Преобразование спектра исходного служебного сигнала
Одновременно с расширением спектра сигнала происходит и перераспределение спектральной энергетической плотности сигнала – энергия сигнала также «размазывается» по спектру. В результате максимальная мощность преобразованного сигнала оказывается значительно ниже мощности исходного сигнала. При этом уровень служебного сигнала может в буквальном смысле сравниваться с уровнем естественного шума. В результате сигнал становится в каком-то смысле «невидимым» – он просто теряется на уровне естественного шума или информационного сигнала.
Технология расширения спектра была предложена как направление решения проблемы одновременного совместного использования радиостанций в одном частотном диапазоне, не мешающих друг другу. Существует несколько различных технологий расширения спектра, однако для решения данной проблемы предлагается использовать технологию расширения спектра методом прямой последовательности (Direc Sequence Spread Spectrum, DSSS).
Сущность технологии DSSS представлена на
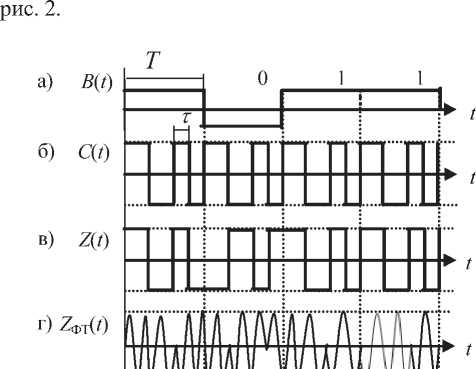
Рис. 2. Диаграммы формирования DSSS-последовательности
При потенциальном кодировании биты служебной информации B ( t ) – логические нули и единицы – передаются прямоугольными импульсами напряжений. Прямоугольный импульс длительности T имеет спектр, ширина которого обратно пропорциональна длительности импульса. Поэтому чем меньше длительность служебного бита, тем больший спектр занимает такой сигнал.
Для преднамеренного расширения спектра первоначально узкополосного сигнала в технологии DSSS в каждый передаваемый служебный бит встраивается последовательность так называемого заполнения с длительностью импульса г в несколько раз меньше длительности служебного бита. Поскольку длительность одного элемента заполнения в n раз меньше длительности служебного бита, то и ширина спектра преобразованного сигнала будет в n раз больше ширины спектра первоначального сигнала. При этом и амплитуда передаваемого сигнала уменьшится в n раз.
Элементы заполнения, встраиваемые в информационные биты, называют шумоподобными кодами, а результирующий сигнал становится шумоподобным, и его трудно отличить от естественного шума.
Использование шумоподобных сигналов в каналах дистанционного управления
Согласно предлагаемому методу, служебная информация B ( t ), которая при цифровой связи также представляет собой последовательность импульсов, но значительно большей длительности, перемножается с псевдослучайной последовательностью, как показано на рис. 3. Полученный шумоподобный сигнал Z ( t ) суммируется с основным полезным сигналом и передается в канал связи.
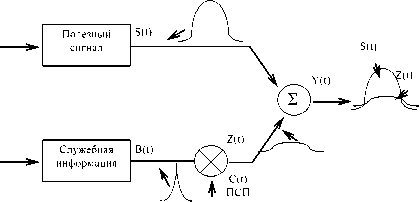
Рис. 3. Структурная схема датчика информации
Передаваемый сигнал Y ( t ) можно представить в виде:
y(/) = S(/) + Z(z), (1)
где S ( t ) – основной сигнал; Z ( t ) – шумоподобный сигнал. Из рис. 3 видно, что полезный сигнал S ( t ) для служебной информации Z ( t ) в этом случае играет роль мощной помехи еще до передачи в канал связи. Полученная последовательность Z ( t ) является комбинационной, она по своим «внешним» свойствам, то есть по ширине спектра и виду автокорреляционной функции, практически не отличается от исходной ПСП, но несет в себе полезный сигнал. При условии линейной независимости, или ортогональности, полезный сигнал и служебная информация могут передаваться одновременно. На приемной стороне, вычисляя функцию взаимной корреляции поступающего сигнала
Т т
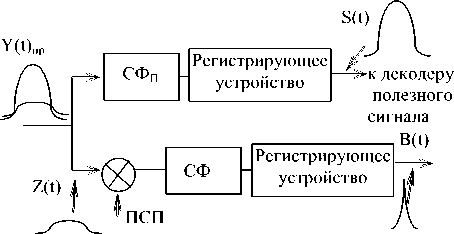
5(/,r) = р>(0 • фМ,т^ d/ + jz(t) ■ ф(?,г) dz, (2) О о можно выделить составляющие основного и шумоподобного сигналов. Структурная схема приемника представлена на рис. 4.
В качестве корреляторов используются согласованные фильтры, задачей которых является не восстановление формы сигнала, искаженного шумом, а получение одного отсчета, по которому можно судить о присутствии или отсутствии на входе фильтра сигнала известной формы, то есть либо основного S ( t ), либо шумоподобного Z ( t ). Шумоподобный сигнал Z ( t ) перемножается на приеме с ПСП, образованной в приемнике и в точности совпадающей с ПСП, используемой в передатчике. В случае корреляционного приема, когда B ( t ) становится равным 1, амплитуда «шумов», то есть полезного сигнала, уменьшается примерно в N раз, причем величину N можно выбрать произвольно.
к декодеру служебной информации
Рис. 4. Структурная схема приемника
Метод шумоподобной передачи был открыт Шенноном, который впервые ввел в рассмотрение понятие пропускной способности канала связи
( Р А
C = AF-log2 1 + ^ , (3)
где С – пропускная способность канала связи; ДР – на полосы пропускания канала связи; Рс – мощность сигнала; Рш – мощность шума.
Это уравнение устанавливает связь между возможностью осуществления безошибочной передачи информации по каналу связи с заданным соотношением сигнал/шум и полосой частот, отведенной для передачи информации.
В соответствии с нормами на каналы передачи данных шумовая защищенность р должна быть 101og2 —— « 35 дБ. Исходя из Рш этих соображений, выберем соотношение основного сигнала и шумоподобного равным р
101og2—^ = 40 дБ. Очевидно, что этот уро-Рш вень мощности ШПС практически не влияет на достоверность основного сигнала. Перевод дБ в разы показывает, что основной сигнал должен в 56 раз превосходить по уровню шумоподобный.
Полагая, что пропускная способность C равна максимально необходимой скорости передачи служебной информации по каналу связи ^ ^ МАХ , проведем расчет обратной задачи Шеннона, для которой в качестве сигнала выступает команда управления радиостанцией, представленная шумоподобным сигналом, а под шумом понимается информационный сигнал. В этом случае соотношение Р 1 р
—^ = « 1 • Для значения ^< 1 справед-Рш 56 Рш ливо выражение [3]:
( р Л р log2 1 + (4)
V
Тогда Nmax^AF ^ = 3100= 50 Бит/C. Таким образом, если выполнить условие NПЕР < ^МЛХ и выбрать стандартную скорость передачи NПЕР = 50 Бит/C, то можно практически в реальном масштабе времени управлять режимами работы радиостанции, не прекращая передачи основного потока информации.
Предлагаемый метод является универсальным и может быть применен для различных видов радиолиний как одноканальных, так и многоканальных, с различными видами модуляции и способами обработки сигнала на приеме.
Расчет параметров шумоподобных сигналов
Выбор энергетических параметров основного сигнала и сигнала управления радиостанцией проведем исходя из условия равной различимости этих сигналов. Равное различение этих сигналов возможно, если существует равенство:
р Т = Р Т (5)
с с шп ШИ’ где Рс, р, – мощность основного и шумоподобного сигналов; Тс, – длительность единичного интервала основного и шумоподоб- ного сигналов.
В качестве критерия выберем допустимое значение вероятностей ошибки основного сигнала Ртр при условии введения в информационный тракт мешающих шумоподобных сигналов управления радиостанцией. Выражения для расчета вероятности ошибки при различных видах модуляции и способах обработки сигнала на приеме приведены в таблице 1.
В таблице приняты следующие обо- значения: h2 = ^ – отношение мощно-

стей основного сигнала и шумоподобного;
je 2 dt – интеграл вероятности.
Таблица 1. Значения вероятности ошибки
|
Манипуляция |
Вид обработки сигнала |
|
|
некогерентный |
когерентный |
|
|
Амплитудная |
р =lp-0.25h2 Г0Ш 2 V |
рош = 1-р(ь7оД |
|
Частотная |
р =le-°-5h2 0,и 2 |
Po^l^Vh7) |
|
Фазовая |
р -lp-0.2Sh2 ™ "2 |
Pom=l-F(hV2) |
|
Относительная фазовая |
Р =-e"h2 2 |
P„m-2[l-F(hV2)]-F(hV2) |
Задаваясь значением требуемой вероятности ошибки РТР , легко определить необходи- мое значение h2 . Используя выражение (5), получаем
Ршп Те
Отсюда мощность шумоподобного сигнала управления радиостанцией равна

а скорость передачи составит

Num
Таким образом, зная параметры информационного сигнала и требования к достоверности передачи информации, можно всегда рассчитать параметры служебного широкополосного сигнала.
Заключение
Применение адаптивных радиолиний декаметрового диапазона характеризуется неэффективным использованием частотного диапазона из-за частых перерывов в связи для передачи команд управления взаимодействующими радиостанциями. Предлагаемый алгоритм передачи служебной информации на основе шумоподобных широкополосных сигналов обладает более высокой информационной эффективностью за счет одновременной передачи в одной полосе частот как информационного, так и служебного сигнала при условии обеспечения требуемой достоверности передачи информационных сообщений.
Список литературы Применение шумоподобных сигналов при дистанционном управлении радиостанцией по каналам дальней связи
- Игнатов, В.В., Килимник Ю.П., Никольский И.Н. Военные системы радиосвязи. Л.: ВАС, 1989. -386 с.
- Зегерс А. Передача в общей полосе информационных сигналов и синхронизирующих последовательностей//Зарубежная радиоэлектроника. №1, 1970. -С. 4-19.
- Маковеева М.М., Шинаков Ю.С. Системы связи с подвижными объектами. М.: Радио и связь, 2002. -440 с.
