Применение современных интеллектуальных технологий для исследования сложных многомерных динамических объектов технологического оборудования

Автор: Поляков А.Е., Рыжкова Е.А., Иванов М.С., Осина А.М.
Журнал: Материалы и технологии @mat-tech
Рубрика: Информационные технологии и автоматизация
Статья в выпуске: 1 (3), 2019 года.
Бесплатный доступ
Объектом исследования и частичной модернизации является технологическая линия, производящая термоскрепленное объемное нетканое полотно из бикомпонентного химического волокна поверхностной плотностью 150-500 г/м2. Исследуется влияние неровноты питающего настила на качество прочеса. Получение ровного питающего слоя волокнистого продукта для чесальной машины, являющейся сложным многомерным динамическим объектом поточной линии, является сложной научно-технической актуальной задачей. Ставится и решается задача разработки способов адаптации самовеса (весового механизма) к изменению величины потока поступающего волокна.
Система автоматического регулирования (сар), нечеткий регулятор, неровнота питающего волокнистого материала
Короткий адрес: https://sciup.org/142224510
IDR: 142224510 | УДК: 621.798.426-52 | DOI: 10.24411/2617-149X-2019-11010
Application of modern intelligent technologies for investigation of complex multidimensional dynamic objects of technological equipment
The object of research and partial modernization is a technological line that produces a thermally bonded nonwoven web of bicomponent chemical fiber with a surface density of 150-500 g/m2. The influence of the unevenness of the feeding deck on the quality of the web is investigated. Obtaining an even fiber layer for a carding machine, which is a complex multidimensional dynamic object of a production line, is a complex scientific and technical problem. The problem is set and solved to develop methods for adapting the self-weight (weight mechanism) to the change in the amount of flow of incoming fiber.
Текст научной статьи Применение современных интеллектуальных технологий для исследования сложных многомерных динамических объектов технологического оборудования
На процесс формирования порции оказывают влияние конструктивные особенности самовеса, его режимные параметры, а также физико-механические свойства смеси: влажность, размеры клочков, плотность, коэффициент трения. В существующей системе автоматического управления при изменении величины потока волокнистого продукта скоростные режимы игольчатой решетки самовеса не обеспечивают требуемого быстродействия, т. к. отсутствует оперативный контроль поступающего волокна. Рациональным способом получения недостающих данных является использование современных методов и технологий для исследования сложных управляемых динамических объектов.
С этой целью авторами в системе Matlab разработан нечеткий регулятор, который обеспечивает скоростной режим игольчатой решетки самовеса, учитывающий изменения потока волокнистого продукта [1].
При разработке системы управления с нечетким регулятором достигнута плавность изменения выходного сигнала управления. В качестве входных сигналов для регулятора использованы сигнал датчика массы и временной счетчик, изменяющий выходное значение на единицу каждую секунду и следящий за временем формирования порции. В начале каждого цикла работы самовеса счетчик обнуляется. Выходным сигналом нечеткого регулятора является напряжение в диапазоне 1…4,5 В, соответствующее линейной скорости игольчатой решетки 1–4,5 м/мин.
В основе нечеткого регулятора (Fuzzy Logic Controller) лежит система нечеткого вывода Мамдани
[2], которая использована в разработанной схеме вместо интегрального регулятора (рис. 1).
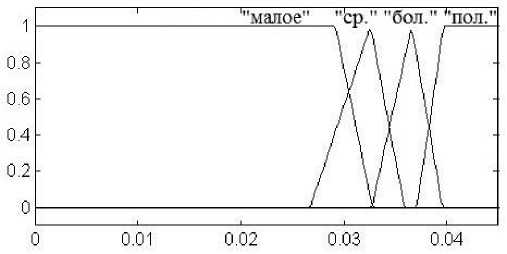
Фаззификация входных переменных представлена на рисунке 2. Для входных переменных использованы треугольные функции принадлежности. Лингвистическая переменная «масса порции» имеет четыре значения: «малое», «среднее», «большое», «полное». Соответственно «время» представлено тремя значениями: «мало», «нормально», «много». Форма каждой функции принадлежности определялась исходя из технологического регламента.
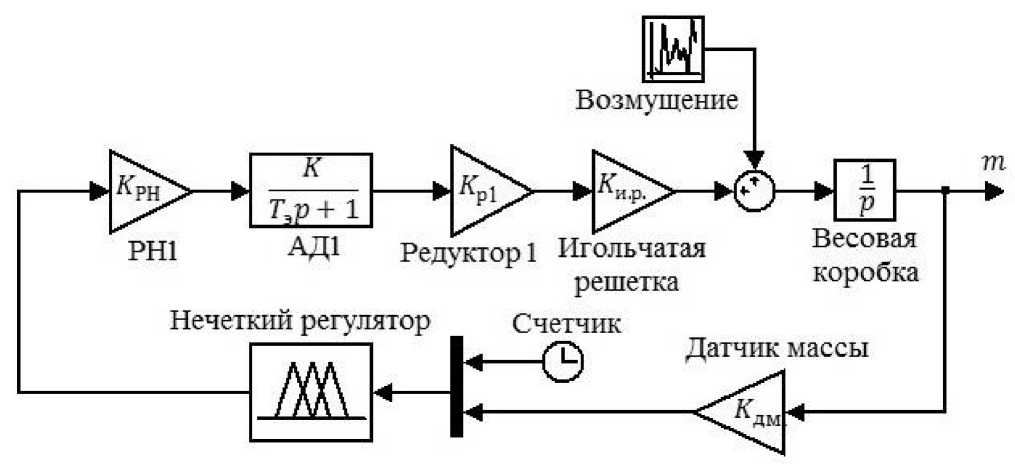
Рисунок 1 – Структурная схема управления процессом подачи волокнистого материала в самовес с нечетким регулятором
а
б
Рисунок 2 ‒ Оценка разрывного удлинения джинсовой ткани
При создании базы правил использованы следующие параметры: И-метод – максимум, импликация – минимум, агрегация – максимум, дефаззификация – центроидная.
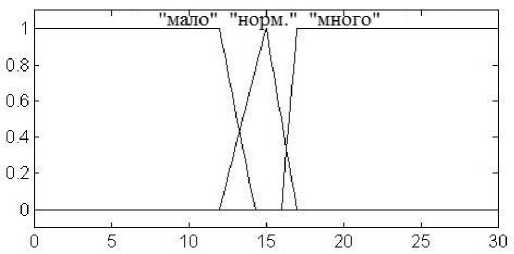
Фаззификация выходной переменной представлена на рисунке 3. Выходная переменная имеет значения в диапазоне от 0 до 4,5 В и описывается пятью треугольными функциями принадлежности: U0 = 0; U1 = 1; U3 = 2; U4 = 3,5; U5 = 4,5. Путем пересечений функций принадлежности достигается плавность изменения выходного сигнала. График изменения скорости игольчатой решетки при настроенном нечетком регуляторе показан на рисунке 4.
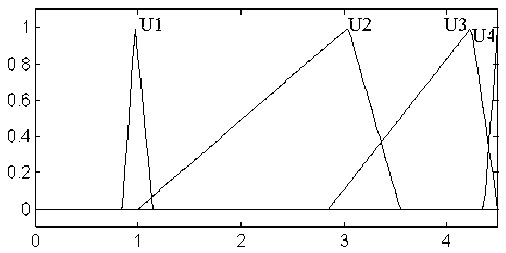
Рисунок 3 ‒ Фаззификация выходной переменной
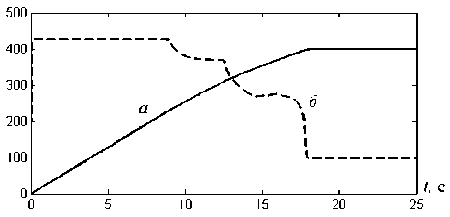
Рисунок 4 ‒ Переходной процесс в системе с нечетким регулятором: а – изменение массы порции, г; б – линейная скорость игольчатой решетки 100·м/мин
Применяя экспериментально-теоретическое моделирование, установлено, что при снижении массы потока поступающего волокна на 20 % нечеткий регулятор уменьшает время формирования 400 г порции на 27 % по сравнению с интегральным регулятором (рис. 5). Это указывает на целесообразность применения нечеткого регулятора при управлении процессом подачи волокнистого материала в самовес.
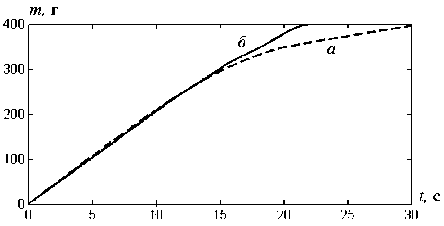
Рисунок 5 ‒ Процесс формирования порции САР: а – с интегральным регулятором; б – с нечетким регулятором
Разработанный интеллектуальный алгоритм управления скоростным режимом игольчатой решетки имеет следующие достоинства:
‒ обеспечивает точность массы порции, как и в разработанной схеме управления с интегральным регулятором;
‒ снижает вероятность недовеса порции при установленной продолжительности цикла работы самовеса;
‒ уменьшает необходимое время выстоя;
‒ снижает требование к уровню волокнистой смеси в загрузочном бункере.
Учитывая способность искусственных нейронных сетей реализовывать произвольные гладкие функции любой сложности [3], разработан нейрорегулятор скорости игольчатой решетки, основанный на нейронной сети с одним скрытым слоем.
Методом проб и ошибок установлено, что удовлетворительные показатели регулирования имеет структура нейронной сети, состоящая из пяти нейронов в скрытом слое. Сеть имеет следующие параметры:
‒ алгоритм обучения: обратное распространение ошибки;
‒ метод настройки весов Левенберга-Марквардта;
‒ количество эпох для обучения ‒ 300;
‒ минимум градиента ошибки ‒ 10-5;
‒ параметры скорости обучения – декремент 0,1; инкремент 10.
Для обучения сети составлена выборка из 504 значений, полученных из схемы с интегральным регулятором с установленными оптимальными параметрами. В качестве входных данных использованы значения датчика массы во время работы системы в течение 25 с. Выходными данными являются соответствующие значения интегрального регулятора, переведенные в безразмерную величину.
Во время обучения начальные значения весов установлены случайным образом. Однако не все начальные значения приводят к глобальному минимуму ошибки. Поэтому необходимо вновь проводить начальную настройку весовых коэффициентов.
Процесс обучения (рис. 6) произведен за 216 эпох. При этом суммарная квадратичная ошибка (СКО), определяющая установленную точность отработки сигнала, достигла 10-5. В результате обучения установлены следующие весовые коэффициенты и смещения для нейронов:
‒ к скрытому слою от входного слоя
[-24.2809; -27.8631; -2.5629; -0.5094; -6.4927];
‒ к выходному слою от скрытого слоя [-23.7182 7.5445 -3.4597 -5.3173 -7.162];
‒ смещение нейронов скрытого слоя
[25.0068; 27.9158; 3.5206; -0.7203; -5.8993];
‒ смещение выходного нейрона [7.8825].
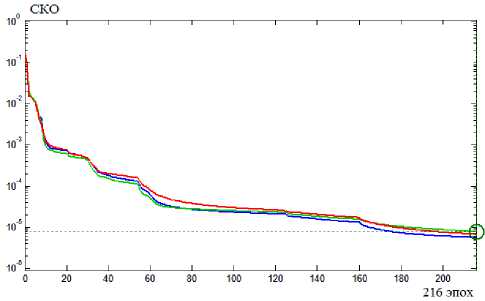
Рисунок 6 ‒ Зависимость градиента ошибки от количества эпох обучения
Модель обученной нейронной сети использована в САР скорости игольчатой решетки (рис. 7). Путем моделирования в Simulink установлены свойства адаптации системы к изменению величины потока поступающего волокна. На рисунке 8 видно, что за счет изменения формы управляющего сигнала нейронной сетью время формирования порции уменьшается на 27 % по сравнению с интегральным регулятором.
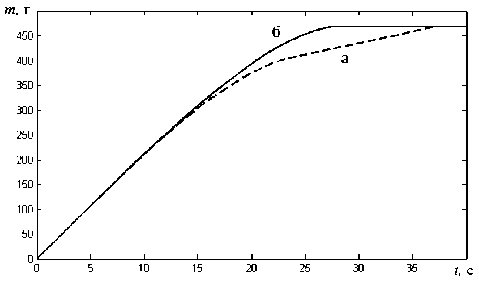
Рисунок 8 ‒ Процесс формирования порции САУ: а – с интегральным регулятором;
б – с нейрорегулятором
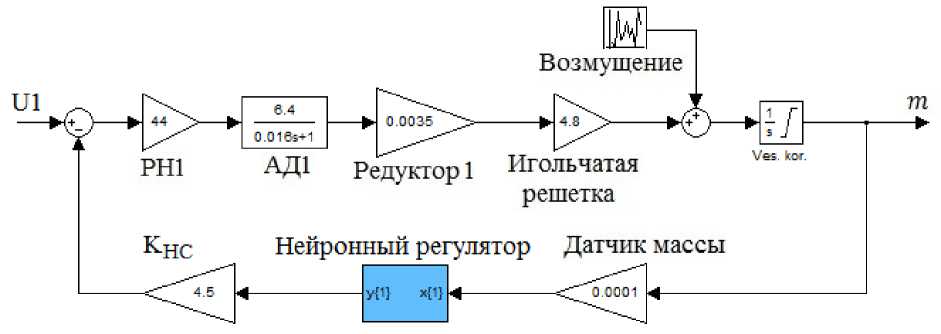
Рисунок 7 ‒ Структурная схема управления процессом подачи волокнистого материала в самовес с нейрорегулятором
В итоге разработаны два способа адаптации самовеса к изменению величины потока поступающего волокна. Исследование регуляторов на основе использования нечеткой логики и теории нейронных сетей позволило установить следующее [4]:
‒ оба способа обеспечивают желаемую точность и быстродействие системы управления, а также снижают требования к уровню волокнистой смеси в загрузочном бункере.
ВЫВОДЫ
Проектирование нечетких регуляторов требует значительное время для подбора форм и количества функций принадлежности, а также для составления базы правил; установлено, что нейрорегулятор не требует контроля времени наполнения, что упрощает схему САР; гладкую форму выходного сигнала нечеткого регулятора получить сложнее, чем у нейрорегулятора; хорошие аппроксимирующие способности нейронной сети для несложных задач управления можно получить, используя структуры сетей с малым количеством нейронов; разработанный нечеткий регулятор требует большей вычислительной мощности по сравнению с нейрорегулятором.
Список литературы Применение современных интеллектуальных технологий для исследования сложных многомерных динамических объектов технологического оборудования
- Поляков, А. Е. Применение современных методов и технологий для исследования сложных управляемых электротехнических комплексов: монография / А. Е. Поляков, К. А. Поляков. - Москва: ГОУВПО «МГТУ им. А.Н. Косыгина», 2010. - 181 с.
- Mamdani, E. H. Application of fuzzy algorithm for simple dynamic plant / E. H. Mamdani // Proceedings of the Institution of Electrical Engineers. - 1974. - 121(12). - Р. 1585 - 1588.
- Усков, А. А. Интеллектуальные технологии управления. Искусственные нейронные сети и нечеткая логика / А. А. Усков, А. В. Кузьмин. - Москва: Горячая линия - Телеком, 2004. - 143 с.
- Поляков, А. Е. Энергосбережение за счет применения интеллектуальных систем управления электротехническими комплексами технологического оборудования: монография / А. Е. Поляков, Е. М. Филимонова. - Москва: ФГБОУВПО «МГУДТ», 2016. - 186 с.
