Применение вариативного представления клапанных пружин для моделирования динамики МГР ДВС

Автор: Васильев Александр Викторович, Федоров Николай Николаевич
Журнал: НБИ технологии @nbi-technologies
Рубрика: Технико-технологические инновации
Статья в выпуске: 1 (8), 2013 года.
Бесплатный доступ
В статье изложена методика уточненной оценки нагруженности МГР на примере двигателя ВАЗ. С помощью разработанной математической модели может исследоваться динамика клапанного привода.
Колебания витков клапанной пружины, нагруженность, математическая модель, механизм газораспределения, двигатель внутреннего сгорания
Короткий адрес: https://sciup.org/14968467
IDR: 14968467 | УДК: 621.431.73
Applying valve spring variant representation for valve train dynamics simulation
In this paper refined estimation technique of internal combustion engine valve train stress loading on example of VAZ engine. The technique is realized by means of the developed mathematical model of research of dynamics of the valvate drive.
Текст научной статьи Применение вариативного представления клапанных пружин для моделирования динамики МГР ДВС
В основе разработанного метода моделирования динамики МГР лежит обобщенная математическая модель («Динамика»), разработанная на кафедре автотракторных двигателей ВолгГТУ. Расчет сил, действующих в МГР, и законов движения его деталей осуществляется на основе представления последних в виде дискретных масс, котороые связаны безынерционными упругими элементами, и численного решения системы дифференциальных уравнений, описывающих движение каждой массы [6].
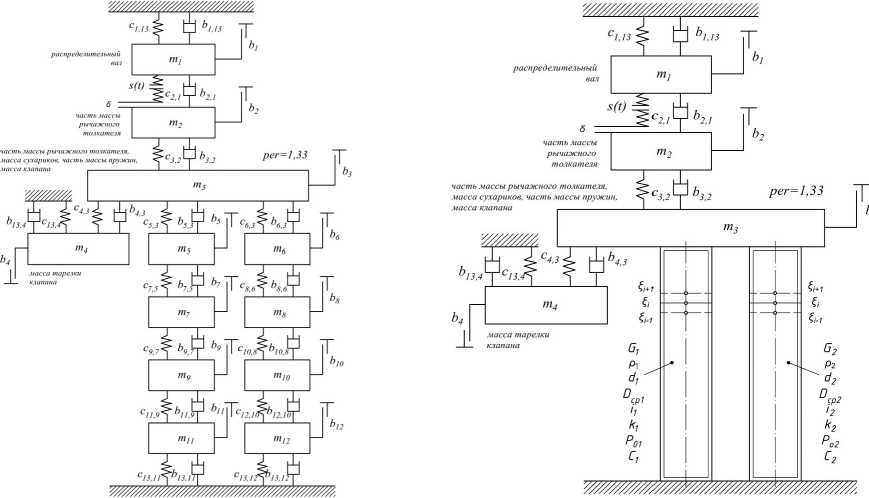
В базовой динамической модели каждая клапанная пружина представлена цепочкой из 6-ти сосредоточенных масс (одна масса пружины неподвижна, а другая отнесена к массе клапана), соединенных упругими связями (см. рис. 1, а). Разработанная математическая модель предусматривает возможность вариативного представления пружин. В дополнение к многомассовому подходу также реализовано представление клапанных пружин в виде эквивалентных стержней (сосредоточенные массы с распределенными параметрами), способных совершать продольные колебания (см. рис. 1, б). Допустимость такого представления следует из бо- лее точной теории расчета пружин, где винтовая пружина рассматривается как тонкий пространственный криволинейный брус. Преимуществом такого подхода является то, что процесс распространения волн напряжений в материале клапанной пружины может быть рассмотрен с позиции основных форм колебаний, которые являются определяющими при оценке нагруженности МГР. Для моделирования этих колебаний продольными колебаниями стержня должно быть соблюдено равенство значений массы и продольной жесткости пружины соответствующим величинам стержня. Применение такой схемы, помимо уточнения закона движения клапана, дает возможность более точно оценивать на-груженность самих клапанных пружин [3].
Программа для расчета вибраций клапанных пружин и их влияния на динамику МГР была реализована в виде отдельного расчетного модуля ( SPR ), работающего совместно с базовой динамической моделью.
Действующие на клапан со стороны пружин усилия упругих деформаций определялись в ходе численного решения уравнения колебаний их витков [3; 4] с соответствующими начальными и граничными условиями внутри модуля SPR . Уравнение колебаний витков получило вид
52U К; ф ) + 2 ц d U К; ф )
дф 2 го дф
2 a\ го )
д 2 и К; ф ) д^ 2 ,
где U – продольное смещение сечения эквивалентного стержня от положения статического равновесия, мм;
m – коэффициент вязкого сопротивления (принимает значения в диапазоне 20…30, если не используется внешний пружинный демпфер);
x – безразмерная длина (отношение расстояния сечения от начала рабочего участка пружины до рассматриваемого сечения к полной длине пружины);
j – угол поворота распределительного вала, рад.;
w – частота вращения распределительного вала, рад/с;
a – относительная скорость распространения волн деформации по длине пружины, с-1.
Удобно использовать нулевые начальные данные в качестве начальных , так как в начале движения клапан закрыт и неподвижен, перемещения витков пружины равны нулю. Граничные условия: перемещение примыкающего к опоре витка равно нулю, а движение подвижного конца клапанной пружины определяется движением клапана.
В основу разработанной программы был положен метод последовательных приближений, позволяющий исследовать динамику клапанной пружины на установившемся режиме. Расчет первого цикла начинался с положения статического равновесия витков. Начало отсчета по углу поворота распределительного вала соответствовало моменту начала подъема клапана при полностью устраненном тепловом зазоре. Исходная переменная – перемещения сечений пружины U ( X ; j ) - определялась интегрированием величины относительных деформаций витков h ( X ; j ) вдоль приведенной длины пружины x:
Г ю^4 i
U Й; ф ) = 1 —l j n ( ^ ; Ф у ) d ^ , (2)
V a / о
а б
Рис. 1. Расчетные схемы для исследования динамики МГР:
а – исходная динамическая модель (клапанные пружины представлены цепочкой дискретных масс); б – предлагаемая модель (клапанные пружины представлены в виде эквивалентных стержней)
Расчет продолжается до тех пор, пока не будет достигнут установившийся режим работы МГР, реализованный внутри итерационного цикла, и будет найдено периодическое решение. Решение считалось установившемся и процесс итераций, как только различие начальных данных итерации и ее конечных результатов становилось меньше заданных погрешностей расчета. По достижении установившегося режима были определены действующие на клапан со стороны пружин усилия
P. = PX^, ф)=pol + ci— nj^, ф), a
P c . = P ci . Ф ) = P o d . + c d. — П d. ( ^ , Ф ), (3)
aâ , где P0н. и P0в. – величина усилия предварительной затяжки наружной и внутренней клапанных пружин соответственно, Н;
cн. и cв. – жесткости наружной и внутренней клапанных пружин соответственно, Н/мм;
aн. и aв. – скорость распространения волн деформаций в наружной и внутренней пружинах соответственно, с-1;
( а н V U h ( а в}д U e
-
n h. =1 _ Гяё" и n в. =1 _ - OTHOCU-
-
V го J 5^ I ® 7 d^
тельная деформация наружной и внутренней клапанных пружин соответственно, мм
Таким образом, применительно к данной задаче взаимодействие базовой модели исследования динамики D и расчетного модуля SPR в пределах одного шага расчета по углу поворота распределительного вала ф сводится к определению ускорения, скорости и перемещения клапана, а также всех действующих на него усилий путем численного решения уравнений движения дискретных масс, занесением значения скорости клапана в качестве граничного условия для решения волнового уравнения (1) в модуль расчета нагруженнос-ти клапанных пружин SPR, определение величин перемещения сечений и относительных деформаций витков, а затем и действующих на клапан со стороны клапанных пружин усилий Pн. и Pв. и передача их обратно в D для расчета нагруженности МГР и определения действующих результирующих усилий
На рисунке 2 в качестве примера приведены полученные расчетно значения усилий от наружной и внутренней клапанных пружин, действующих на клапан, в первой основной форме колебаний при частоте вращения распределительного вала n = 2 068 об/мин Как видно, процесс колебаний не прекращается после посадки клапана на седло и продолжается до следующего подъема клапана
Оценка адекватности разработанной математической модели динамики МГР и модуля расчета вибраций клапанных пружин SPR производилась по соотношению дисперсий адекватности и воспроизводимости и осуществлялась путем сравнения экспериментальных, полученных при обработке результатов скоростной киносъемки [1], и расчетных средних пиковых значений перемещений сечений витков < U > для наружной клапанной пружины при зазорах в клапанном приводе 0 и 0,1 мм Критерием адекватности служил критерий Фишера Предлагаемая модель показала хорошую сходимость с экспериментальными данными
После вычисления действующих на клапан со стороны клапанных пружин усилий на основе разработанного метода была оценена нагруженность клапанного привода и проанализировано влияние способа представления клапанных пружин на точность получаемых результатов при исследовании его динамики
На рисунке 3 приведена диаграмма усилий, действующих на клапан, при различных способах представления клапанных пружин: каждая пружина представлена 6-ю сосредоточенными массами (см рис 3, кривая 1 ), что соответствует 12-тимассовой динамической модели (см рис 1, а); пружины представлены в виде эквивалентных стержней (см рис 3, кривая 2 ) Сопоставление производилось с экспериментальными данными, полученными при тензометрировании [2] (см рис 3, кривая 3 )
Следует отметить, что ранее исследователями было установлено: способ разбиения клапанной пружины на сосредоточенные массы и их количество существенно влияет на достоверность получаемых результатов при расчете динамики МГР Для адекватного отражения нагруженности МГР достаточно, чтобы каждый виток клапанной пружины был представлен отдельной массой, а увеличение числа масс только усложняет динамическую модель и не ведет к повышению точности получаемых результатов [5]. Это позволяет учесть влияние всех форм колебаний пружины на динамику МГР. В работе [2] показано, что 12-тимассовая модель, при которой каждая клапанная пружина представлена цепочкой из шести масс, дает наиболее адекватные и близкие к эксперименту результаты.
В соответствии с диаграммой (см. рис. 3) предлагаемая комбинированная методика дает лучшую аппроксимацию к экспериментальным данным благодаря уменьшению разницы между расчетными и эмпирическими данными, что особенно хорошо видно во второй половине диаграммы, на стороне посадки клапана. Это обусловлено тем, что представление клапанных пружин в виде эквивалентных стержней позволяет более точно определить нагружен-ность самих клапанных пружин и действующие с их стороны на клапан усилия, а следовательно, дает возможность более адекватно оценить состояние клапанного привода в целом.
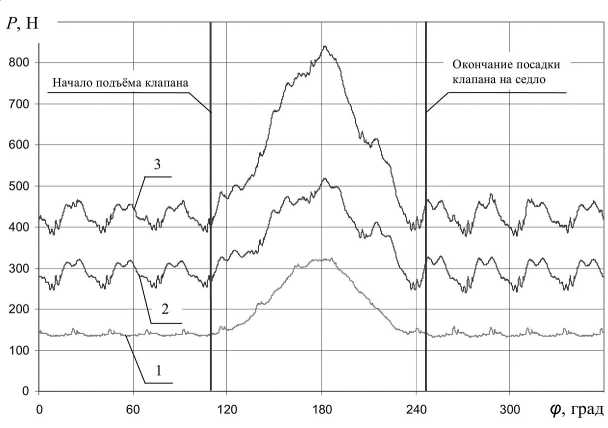
Рис. 2. Действующие на клапан со стороны клапанных пружин усилия при частоте вращения распределительного вала n = 2 068 об/мин:
1 – усилие внутренней пружины; 2 – усилие наружной пружины; 3 – суммарное усилие клапанных пружин
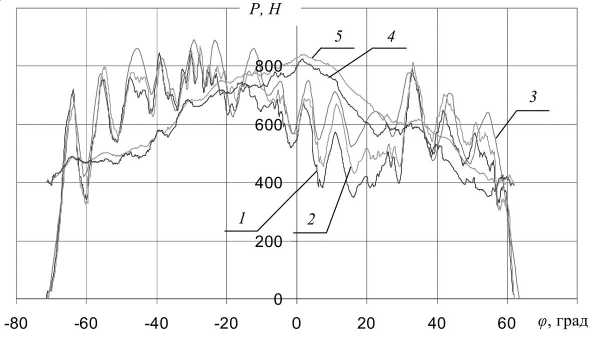
Рис. 3. Усилие в клапанном приводе при частоте вращения распределительного вала n = 2 068 об/мин:
1 – пружины представлены цепочкой масс; 2 – пружины представлены в виде эквивалентных стержней;
3 – эксперимент; 4 – суммарное усилие клапанных пружин (пружины представлены цепочкой масс);
5 – суммарное усилие клапанных пружин (пружины представлены в виде эквивалентных стержней)
Разработанная математическая модель показала хорошую сходимость расчетных и экспериментальных данных в диапазоне изменения частоты вращения распределительного вала n = 157…2 100 об/мин (см. рис. 4, кривые 2, 3).
Максимальное расхождение средних пиковых значений усилий < P > в клапанном приводе при представлении клапанных пружин эквивалентными прямолинейными стержнями (см. рис. 4, кривая 2) с экспериментальной кривой (см. рис. 4, кривая 3) составило около 7 % (при n = 1 368 об/мин), в то время как при методике, предполагающей представление пружин в виде цепочки дискретних масс, оно достигло величины 12 % (при n = 2 068 об/мин).
Средняя величина уточнения пикового усилия, действующего на клапан со стороны рычага, по предлагаемой методике равна 2 %. Наибольшие величины уточнения имеют место при более высоких частотах вращения распределительного вала (4…6 % при n = 1 538…2 100 об/мин).
Из рисунка 4 видно, что сходимость с экспериментальными данными улучшается по мере роста частоты вращения распределительного вала. Следовательно, предлагаемую методику расчета можно экстраполировать и на более высокоскоростные режимы работы двигателя и рекомендовать для исследования динамики клапанного привода современных высокооборотных автомобильных ДВС.
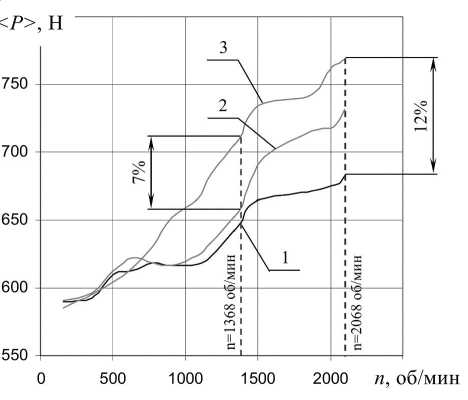
Рис. 4. Среднее пиковое усилие в клапанном приводе:
1 – клапанные пружины представлены цепочкой из 6-ти масс;
2 – клапанные пружины представлены в виде эквивалентных стержней; 3 – эксперимент
Таким образом, разработанная математическая модель, дающая возможность различными способами представлять клапанные пружины, представляет собой комбинированную методику, которая сочетает в себе преимущества как многомассового подхода (простота, оценка влияния высоких форм колебаний на динамику МГР при увеличении числа масс), так и метода эквивалентного бруса (более точная оценка напряженного состояния клапанных пружин). Она позволяет оперативно вносить изменения в структуру расчетной схемы и менять ее параметры, сохраняя при этом простоту, а также уточнить нагрузки, действующие в клапанном приводе.
Список литературы Применение вариативного представления клапанных пружин для моделирования динамики МГР ДВС
- Васильев, А. В. Исследование вибраций клапанных пружин поршневых двигателей/А. В. Васильев, Н. Н. Федоров//Вестник Астраханского государственного технического университета. Сер. «Морская техника и технология». Вып. 2. -Астрахань: АГТУ, 2010. -С. 61-65.
- Васильев, А. В. Экспериментальное исследование и моделирование динамики клапанного механизма автомобильного двигателя/А. В. Васильев, Д. В. Сидоров//Авто НН 08: Автомобильный транспорт в XXI веке: сб. науч. ст. Междунар. науч.-техн. конф., 18-19 дек. 2008 г., посвященной 45-летию кафедры «Автомобильный транспорт» НГТУ им. Р. Е. Алексеева. -Н. Новгород: Нижегор. гос. техн. ун-т им. Р.Е. Алексеева, 2008. -С. 238-242.
- Корчемный, Л. В. Механизм газораспределения автомобильного двигателя: Кинематика и динамика/Л. В. Корчемный. -2-е изд., перераб. и доп. -М.: Машиностроение, 1981. -191 с.
- Хвингия, М. В. Вибрация пружин/М. В. Хвингия. -М.: Машиностроение, 1969. -287 с.
- Kosugi, T. Valve motion simulation method for high-speed internal combustion engines/T.Kosugi, T.Seino//SAE Techn. Pap. Ser. -1985. -№ 850 179. -P. 1-10.
- Vasikyev, A. V. Simulation of valve gear dynamics using generalized dynamic model/A. V. Vasikyev//Mechanika (Lithuania). -2006. -№ 2. -P. 37-43.
