Принцип и особенности функционирования модуля измерения массы породы в ковше карьерного экскаватора

Автор: Гайдуков Кирилл Юрьевич, Потапенко Анатолий Николаевич, Белоусов Александр Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 2-4 т.17, 2015 года.
Бесплатный доступ
В статье рассматривается основной принцип работы модуля измерения массы породы в ковше карьерного экскаватора, использующего для измерения параметры электроприводов.
Карьерный экскаватор, масса породы, электропривод
Короткий адрес: https://sciup.org/148203654
IDR: 148203654 | УДК: 62-531.5
Principle and features of rocks mass module measurement functioning in the bucket of career excavator
In article the basic principle of operation of the module of rocks mass measurement in bucket of the career excavator using parameters of electric drives for measurement is considered.
Текст научной статьи Принцип и особенности функционирования модуля измерения массы породы в ковше карьерного экскаватора
Для повышения эффективности процесса экскавации и погрузки породы экскаватором в карьерах на транспорт необходим контроль этого процесса на основании информации о массе породы в ковше экскаватора. Эта информация передается по каналу обратной связи в кабину машиниста экскаватора и на её основе машинист может оценивать ситуацию и принимать решения для того, чтобы не допускать перегруза или недогруза транспорта, вывозящего горную породу. Это приводит к уменьшению затрат на процесс погрузки, транспортировки и ремонт транспорта. Однако из-за больших размеров оборудования и при кусковом материале, осуществлять непосредственное измерение массы горной породы в ковше экскаватора, например, при помощи резистивных тензодатчиков, непрактично. Поэтому необходимо обратиться к косвенным методам измерения. Один из наиболее эффективных методов таких косвенных измерений – это включение электроприводов в измерительный модуль [1]. Материал в ковше и сам ковш массой m , перемещается по горизонтали и вертикали при помощи канатов лебедки и рукояти напора. Тогда сила Fc, воздействующая на рукоять и канаты, определяются по второму закону Ньютона, как произведение суммы ускорений на массу m . На вал электродвигателя эта сила передается как величина M c – момент статических сопротивлений:
М-Мс = ]^ (1)
Гайдуков Кирилл Юрьевич, аспирант
где M – вращающий момент на валу двигателя; J – приведенный момент инерции двигателя; dω/dt – угловое ускорение.
Активная выходная мощность электродвигателя Р равна:
P = M ω, (2)
где ω – угловая скорость. На основе данных о мощности электродвигателя и скорости вращения, можно определить вращающий момент двигателя [2].
Таким образом, работа предлагаемой системы измерения заключается в том, что чистая масса породы в ковше вычисляется микроконтроллером на основе данных от датчиков с учетом положения груженого ковша, мощности электроприводов и при известной массе пустого ковша. В качестве примера рассмотрим работу предложенной системы измерения на карьерном гусеничном экскаваторе типа ЭКГ-10 с прямой механической лопатой. Основные его характеристики: вместимость ковша – 10 м3, тяговое подъемное усилие на блоке ковша – 100 т, напряжение питающей сети – 6 кВ, мощность электродвигателя – 800 кВт. Общий вид типового экскаватора ЭКГ-10 представлен на рис. 1. В процессе экскавации участвуют три основных электропривода:
-
1) механизма напора (перемещения рукояти вперед или назад);
-
2) механизма подъема (лебедка);
-
3) механизма поворота.
Все три электропривода представляют собой систему типа генератор-двигатель (Г – Д) с использованием двигателей постоянного тока с тиристорным возбуждением.
Рабочий цикл экскаватора можно разделить на 5 операций: процесс копания, в котором участвуют приводы подъема и напора; поворот заполненного ковша к месту разгрузки; разгрузка ковша в место отвала или в транспорт при помощи механизма открывания ковша, оборудованного двигателем постоянного тока; поворот ковша назад, к забою; опускание ковша для подготовки к копанию. Величина Мс, пропорциональная массе загружаемого материала, является нагрузкой двигателей, участвующих в процессе копания, то есть приводов подъема и напора. Нагрузочные диаграммы для электроприводов механизмов подъема и напора, представлены на рис. 2 и рис. 3.
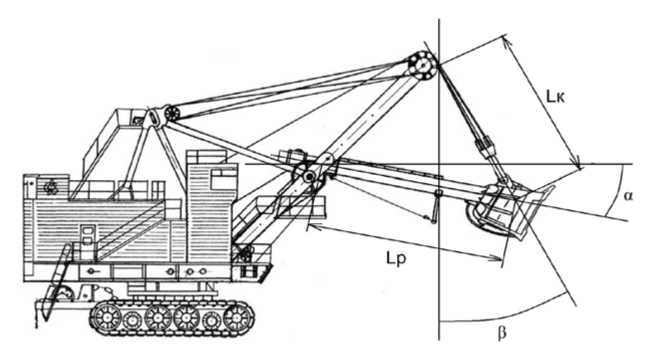
Рис. 1. Общий вид экскаватора ЭКГ-10:
α – угол между горизонталью, проведенной через точку вращения рукояти и осью рукояти экскаватора; β – угол между вертикалью, проведенной через точку подвеса каната лебедки и осью, проведенной вдоль каната; L р – длина рукояти от точки ее вращения до точки подвеса ковша к канату; L к – длина каната от точки его подвеса к стреле до точки подвеса ковша к канату [3]
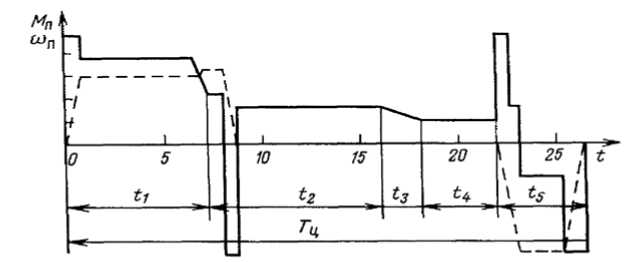
Рис. 2. Нагрузочная диаграмма привода механизма подъема:
Мп – вращающий момент электродвигателя механизма подъема, ωп – частота вращения вала двигателя механизма подъема, t – время: t1 – копание; t2 – подъем груженого ковша и равновесное удержание его на определенной высоте при повороте платформы экскаватора на разгрузку; t3 – разгрузка; t4 – равновесное удержание пустого ковша во время поворота платформы к месту копания; t 5 – опускание ковша с применением торможения
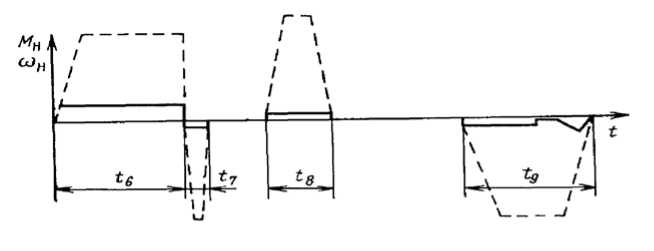
Рис. 3. Нагрузочная диаграмма привода механизма напора:
t6 – напор при копании; t7 – возврат рукояти с груженым ковшом назад; t8 – перемещение рукояти с груженым ковшом вперед при повороте к месту разгрузки; t 9 – вытягивание рукояти при подаче пустого ковша в забой [4]
Таким образом, для измерения массы породы необходимо использовать параметры электроприводов подъема и напора. В качестве таких параметров используются ток якоря, напряжение якорной цепи и ток возбуждения двигателей. Использование параметров электропривода подъема рассматривается в [5]. Функциональная схема измерительного модуля представлена на рис. 4. Блоки «Двигатель механизма подъема» и
«Двигатель механизма напора» представляют собой электродвигатели подъема и напора соответственно, а также датчики тока и напряжения, которые измеряют якорные токи I яп1 и I ян2 , якорные напряжения U яп1 и U ян2 и токи возбуждения I вп1 и I вн2 . Информация от каждого из этих блоков поступает в блоки моделирования подъема и напора.
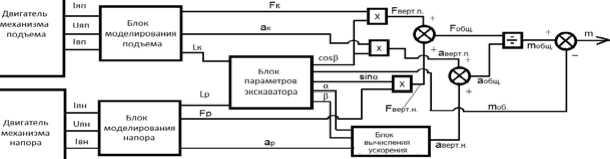
Рис. 4. Функциональная схема измерительного модуля
На основании этих данных, паспортных данных электродвигателей, кривых намагничивания блок моделирования подъема производит вычисление момента M п и скорости вращения двигателя n п . Скорость вращения двигателя используется для вычисления линейной скорости движения ν к каната лебедки. На ее основе вычисляется линейное ускорение a к и текущая длина каната L к . Кроме того, на основе момента вращения двигателя вычисляется подъемное усилие в канате F к , учитывая потери на трение, натяжение канатов, КПД редукторов и двигателя. Аналогично работает блок моделирования напора (определяя a р – линейное ускорение движения рукояти экскаватора; L р – текущая длина рукояти и F р – усилие в рукояти).
Блок параметров экскаватора содержит данные о массе пустого ковша, полных длинах рукояти, канатов и т.д., также он выполняет определение положения ковша экскаватора, вычисляя углы α и β (см. рис.1), используя для этого текущие длинны каната лебедки и рукояти. Затем вычисляется величина F к , которая умножается на cos β для определения вертикальной составляющей усилия подъема – F верт.п . , а F р умножается на sin α для определения F верт.н . – вертикальной составляющей усилия напора. Обе вертикальные составляющие усилий суммируются для определения величины F общ. . Вертикальная составляющая ускорения подъема a верт.п. определяется так же, как и усилие, умножением a к на cos β . Вертикальная составляющая ускорения напора а верт.н определяется в блоке вычисления ускорения, использующем данные положения ковша экскаватора. Вертикальные составляющие ускорений суммируются и определяется а общ. .
Затем, на основании второго закона Ньютона, масса ковша m общ . определяется как отношение F общ. / а общ . . Чистая масса породы в ковше определяется как разность m общ. и известной изначально массе оборудования ковша m об. , учитывающей массу самого ковша, массы рукояти и массы канатов. Учет массы канатов может быть выполнен как в [6].
Измерение параметров и вычисления производятся непрерывно во время работы экскаватора. В процессе вычислений система использует запоминание данных, таких как текущая длина каната, скорость подъема, масса пустого ковша (в случае налипания грунта она может изменяться от цикла к циклу), масса породы в ковше и т.д. Поэтому система также снабжена блоком определения текущей операции процесса экскавации, о которых говорилось выше. Этот блок определяет режим работы на основании напряжения якорной цепи электропривода поворота U яв . , текущей длине каната L к и величины F к при помощи особого алгоритма [7].
Определённая информация о массе горной породы в ковше от вычислительного блока контроллера через интерфейс связи поступает к оператору. Также происходит накопление информации о массе каждого загруженного ковша, для того, чтобы оператор мог следить за массой породы уже загруженной в транспорт.
Выводы: достоинства представленной системы измерения в том, что она учитывает потери на трение, натяжение канатов, КПД редукторов, двигателей и т.п., а также то, что измерение происходит в динамическом режиме.
Список литературы Принцип и особенности функционирования модуля измерения массы породы в ковше карьерного экскаватора
- Потапенко, А.Н. Применение электропривода в «интеллектуальном» измерительном модуле массы породы в ковше карьерного экскаватора/А.Н. Потапанко, К.Ю. Гайдуков, Е.А. Потапенко//Сборник мат-лов XI Всеросс. науч.-практ. конф. «Современные проблемы горно-металлургического комплекса. Наука и производство» -Старый Оскол, 2014. С. 190-194.
- Ключев, В.И. Теория электропривода: учеб. для вузов. 2-е изд. перераб. и доп. -М.: Энергоатомиздат, 2001. 704 с.
- Интернет-ресурс: http://vunivere.ru/work17412/page4.
- Белых, Б.П. Электропривод и электрификация открытых горных работ: учеб. для вузов./Б.П. Белых, В.И. Шуцкий, Б.И. Заславец, Н.И. Чеботаев. -М.: Недра, 1983. 269 с.
- Потапенко, А.Н. Особенности применения электропривода механизма подъема в «интеллектуальном» модуле измерения массы породы в ковше экскаватора/А.Н. Потапенко, К.Ю. Гайдуков, А.В. Белоусов//Известия Самарского научного центра Российской академии наук. 2014. Том 16, №4 (3). С. 603-606.
- Осипова, Т.Н. Учет массы канатов при исследовании динамики одноконцевого подъемника//Вестник БГТУ им. В.Г. Шухова. 2014. №2. С. 72-74.
- Интернет-ресурс: http://www.google.tl/patents/US4677579.
