Принципиальные схемы вихревых струйных захватных устройств для автоматической загрузки технологического оборудования

Автор: Конищева О.В., Брюховецкая Е.В., Кудрявцев И.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 1 т.15, 2022 года.
Бесплатный доступ
Освещены вопросы использования вихревого и струйного эффектов для автоматизации загрузки технологического оборудования. Рассматриваются конструкции захватных устройств, способные удерживать объекты, имеющие плоскую поверхность. Удержание происходит за счет создания вакуума в области захвата, соприкасающегося с плоскостью объекта. Предложены конструктивные элементы, позволяющие увеличить область и величину отрицательных давлений, что увеличивает подъемную силу. Вихревые струйные захватные устройства являются перспективным средством загрузки технологического оборудования в силу экономичности, простоты и других преимуществ. В данной работе рассмотрены возможные конструктивные схемы исполнения вихревых струйных захватных устройств и их влияние на грузоподъемность устройства, а также в зависимости от конструктивных особенностей захватываемых объектов.
Захватное устройство, вихревой эффект, струйный эффект, вихревое струйное захватное устройство, вакуум, подъемная сила
Короткий адрес: https://sciup.org/146282408
IDR: 146282408 | УДК: 621.86.06
Design of vortex jet gripping devices for automatic loading of process equipment
The questions of use of vortex and jet effects for automation of loading of processing equipment are taken up. The designs of gripping devices capable to hold the objects having a flat surface are considered. Deduction happens due to creation of a vacuum in the field of the capture adjoining to the object plane. The structural elements are proposed that allow increasing the area and size of negative pressure, which increases the lifting force. Vortex jet gripping devices are a perspective load facility of the technological equipment owing to profitability, simplicity and other advantages. In this paper, we consider possible design schemes of vortex jet grippers and their effect on the device load capacity and also depending on the design features of the captured objects.
Текст научной статьи Принципиальные схемы вихревых струйных захватных устройств для автоматической загрузки технологического оборудования
Цитирование: Конищева, О. В. Принципиальные схемы вихревых струйных захватных устройств для автоматической загрузки технологического оборудования / О. В. Конищева, Е. В. Брюховецкая, И. В. Кудрявцев // Журн. Сиб. федер. ун-та. Техника и технологии, 2022, 15(1). С. 70–79. DOI: 10.17516/1999-494X-0374
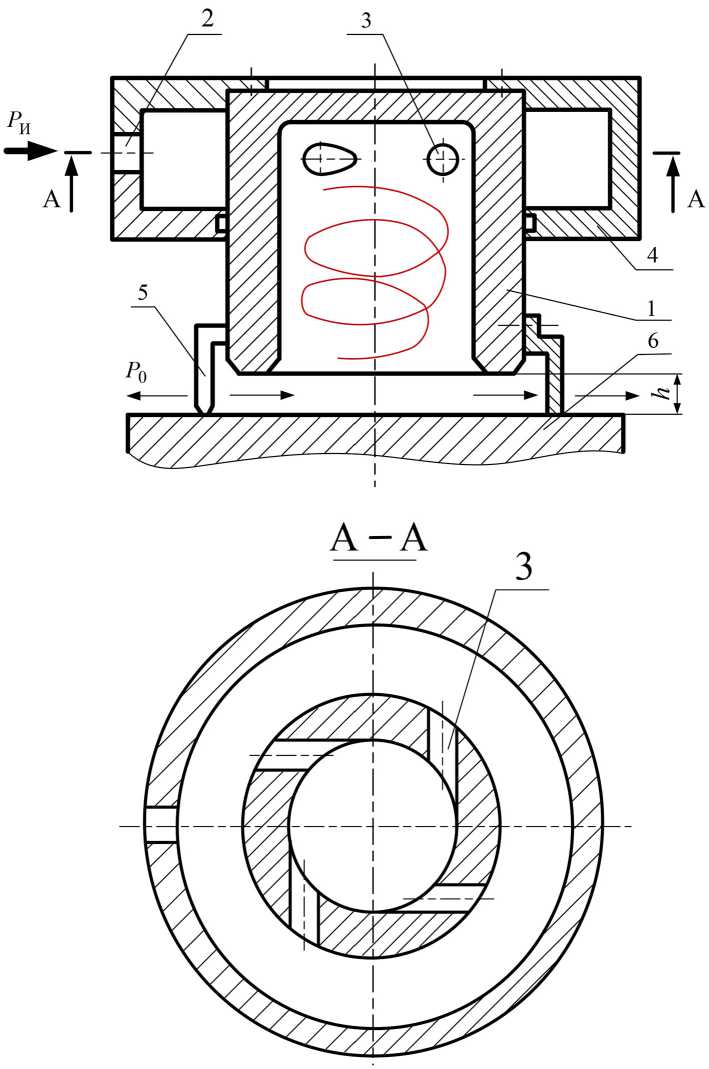
Рис. 1. ВСЗУ в виде пустотелой цилиндрической камеры
-
Fig. 1. Vortex jet gripping device in the form of a hollow cylindrical chamber
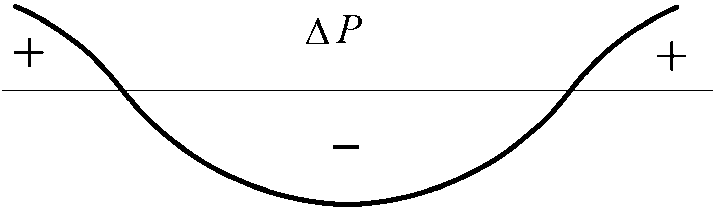
Рис. 2. Приближенная зависимость давления от радиуса
-
Fig. 2. Vortex Approximate Pressure-Radius relationship
Захватное устройство имеет полую цилиндрическую камеру 1, кожух 4 для создания замкнутой полости вокруг камеры, тангенциальные отверстия 3, входное отверстие 2 для подачи сжатого воздуха, упоры 5, позволяющие удерживать заготовку 6 на расстоянии от торца ка-– 72 – меры (рис. 1). Закрученный в цилиндрической камере воздух выходит через зазор между торцом камеры и поверхностью заготовки. Удержание захватываемого объекта происходит только за счет разрежения в центре вихря. При этом захватываемый объект своей верхней поверхностью плотно прижимается к упорам 5, которые можно сделать регулируемыми по высоте, что позволяет менять зазор h в зависимости от подаваемого давления питания pи. Качество обработки поверхности заготовки не влияет на величину подъемной силы, поверхность может быть неровной, иметь уступы, быть искривленной, гофрированной, иметь пористую структуру. Такая конструкция наиболее проста по своему исполнению, требует наименьших затрат на изготовление, т. е. имеет низкую себестоимость. В одних случаях, например для захватывания гофрированных объектов, а также имеющих искривленную поверхность, данная конструкция имеет преимущество, в других случаях можно сказать, что в ней не до конца использована энергия сжатого воздуха, не полностью реализованы имеющиеся возможности.
Устройство, изображенное на рис. 3, можно также отнести к первой группе. Оно имеет полую цилиндрическую камеру 1, кожух 2, тангенциальные отверстия 3, входное отверстие для подачи сжатого воздуха 4, но кроме этого, еще развитой торец 5, в который плавно переходит внутренняя поверхность камеры. На поверхности торца выполнены ребра высотой h , расположенные под углом 30 ° -50 ° к радиусу, что соответствует углу наклона струи, выходящей из камеры.
Ребра 6, во-первых, играют роль упоров, удерживающих заготовку 7 на расстоянии h , при котором достигается наибольшее разрежение на поверхности заготовки. Во-вторых, трение о нижнюю поверхность ребер предотвращает поворот и боковой сдвиг заготовки при резких перемещениях и поворотах. В-третьих, угол наклона ребер к радиусу соответствует направлению выхода струи из цилиндрической камеры. Идеальным вариантом было бы выполнение ребер. Такая форма ребер будет способствовать уменьшению тангенциальной скорости Р ф и уменьшению модуля градиента радиальной скорости по радиусу . Отсюда согласно зависимости
др гФ2 dvr д2уг
р рг г I р or Г or Qz
-^=р^-р7г—^+р—^
градиент давление др/дг будет меньше, т. е. давление будет увеличиваться медленно, что позволит сохранить большее разрежение на большей площади.
Если градиент радиальной скорости cVr /or будет равен нулю или будет небольшим по модулю, но отрицательной величины, то это также будет способствовать уменьшению градиента давления. Это возможно осуществить, если вместо ребер выполнить пазы (рис. 4). При прохождении воздуха в пазах суммарная площадь сечения щелей остается постоянной, а не увеличивается при удалении от центра, как в захвате с ребрами или без них, т. е. радиальная скорость практически не меняется. Если сделать паз немного сужающим к периферии (рис. 4), то радиальная скорость будет даже увеличиваться, а, значит, градиент будет величиной положительной, отсюда в правой части выражения (1) будет отрицательная величина, которая будет способствовать уменьшению градиента давления. На разрежение в центральной области камеры влияет величина V φ max [6], чем она больше, тем больше разрежение в центре, но затем желательно, чтобы тангенциальная составляющая V φ была бы как можно меньше, т. е. после
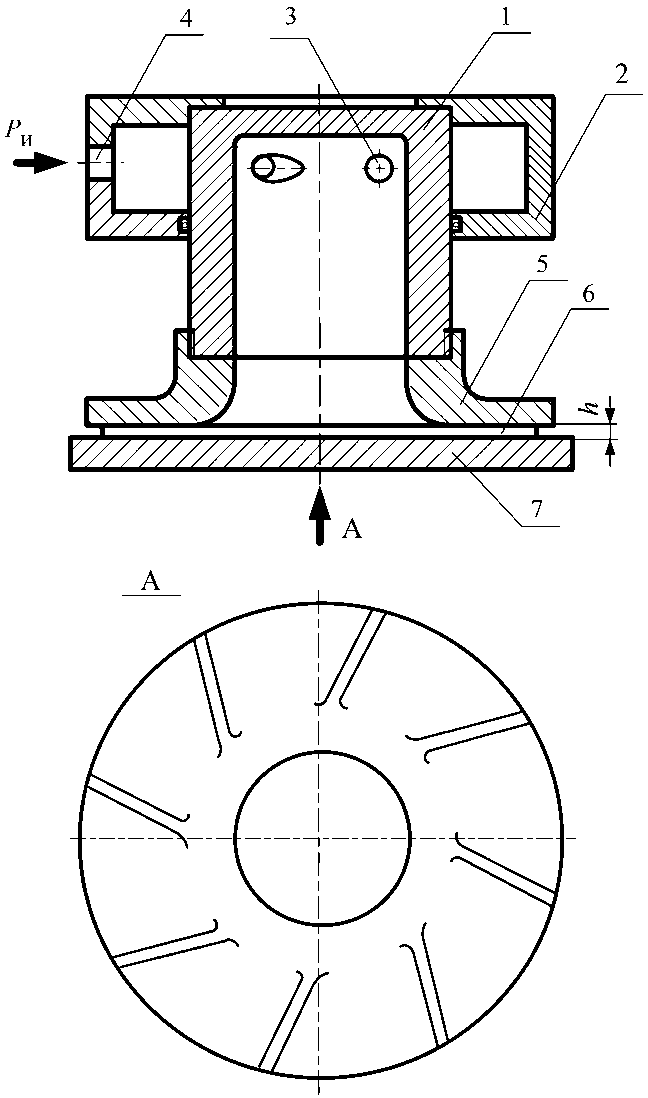
Рис. 3. Схема ВСЗУ с ребрами на рабочей поверхности
Fig. 3. Diagram of vortex jet gripper with ribs on a working surface выхода воздуха из камеры необходимо свести Vφ к нулю. Этого можно добиться особой формой пазов (рис. 5б), которая способствует преобразованию закрученного потока в прямоточный.
Пазы 1 можно сделать шире, тогда получим ребра 2 с увеличенной к периферии толщиной (рис. 6 а ), это было бы рациональнее, т. к. позволило бы увеличить площадь, на которой действует разрежение. Если ребра выполнены такими, что они будут способствовать распрямлению потока (рис. 6 б ), то тангенциальная скорость будет стремиться к нулю, что будет способствовать уменьшению градиента давления dp/dr при удалении от центра, а это является позитивным фактором.
Положительный градиент радиальной скорости dVr /dr способствует уменьшению градиента давления, причем возможно такое соотношение тангенциальной, радиальной скоростей и градиента dVr / dr , при котором градиент dp/dr будет величиной отрицательной. Вывод из этого такой: чем больше будет область, на которой градиент dVr /dr положителен, тем луч-
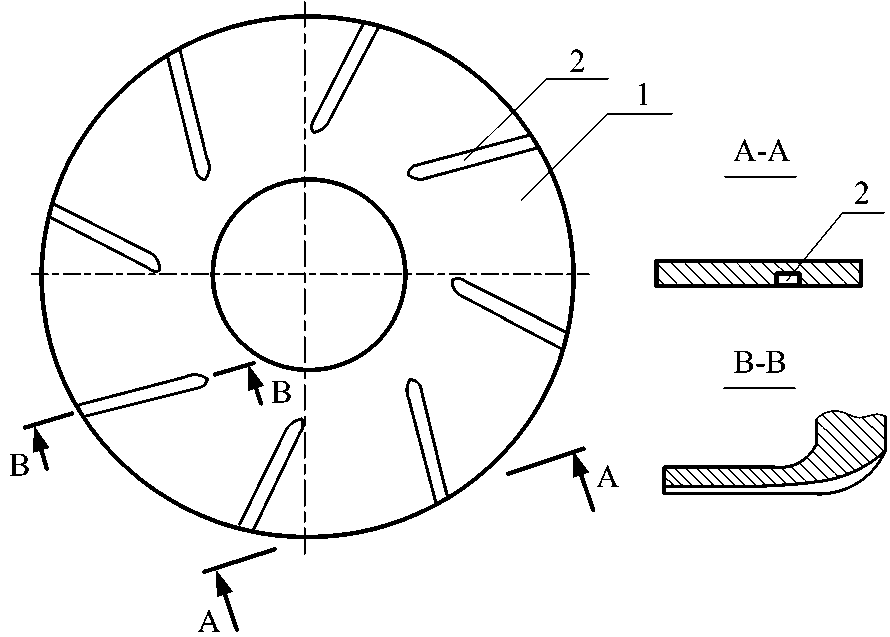
Рис. 4. Насадок с пазами
Fig. 4. Nozzle with slots
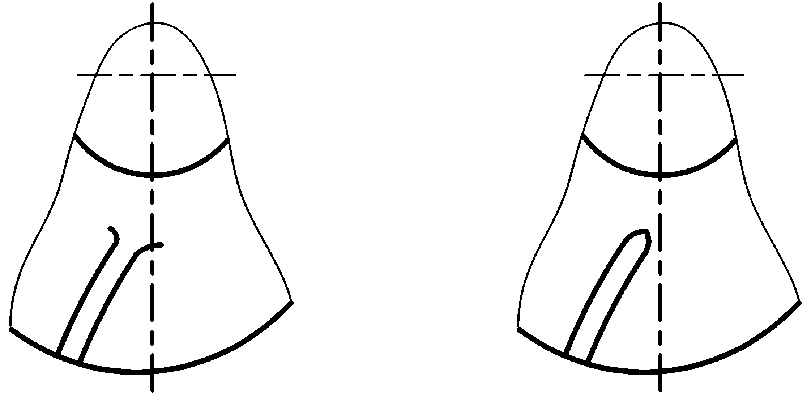
Рис. 5. Криволинейные ребра (а) и пазы (б)
Fig. 5. Curved ribs (a) and slots (b)
ше для работы ВСЗУ. Сужающийся паз (рис. 6 в ) позволит увеличить область положительного градиента dVjdr до участка, где зазор становится равным величине h , при этом диаметр торца можно увеличить, т. е. увеличить область отрицательных давлений.
Устройство, изображенное на рис. 3, можно также отнести к первой группе. Оно имеет полую цилиндрическую камеру 1, кожух 2, тангенциальные отверстия 3, входное отверстие для подачи сжатого воздуха 4, но кроме этого, еще развитой торец 5, в который плавно переходит внутренняя поверхность камеры. На поверхности торца выполнены ребра высотой h , расположенные под углом 30○–50○ к радиусу, что соответствует углу наклона струи, выходящей из камеры.
Ко второй группе относятся захваты, в которых закрученный воздух истекает через кольцевой зазор. Конструктивным отличием ВСЗУ второй группы является вставка, установленная соосно цилиндрической камере (рис. 7). Силовые характеристики таких захватов повышаются, их можно применять для деталей различной конфигурации.
В цилиндрической камере 1 соосно ей устанавливается цилиндрическая вставка 2, которая на торце образует кольцевую щель 3. При подаче воздуха через отверстие 4 и далее через
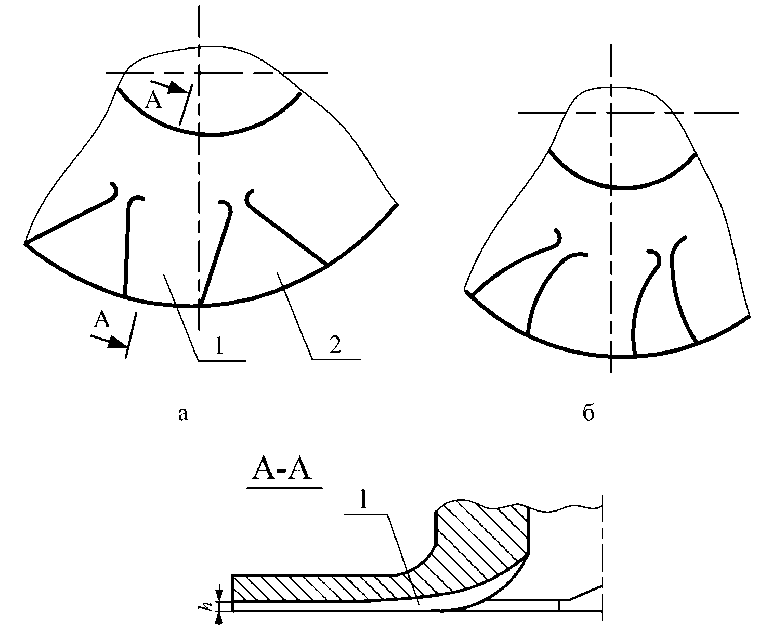
в
Рис. 6. Насадки с ребрами разной формы
Fig. 6. Nozzles with different shapes of ribs
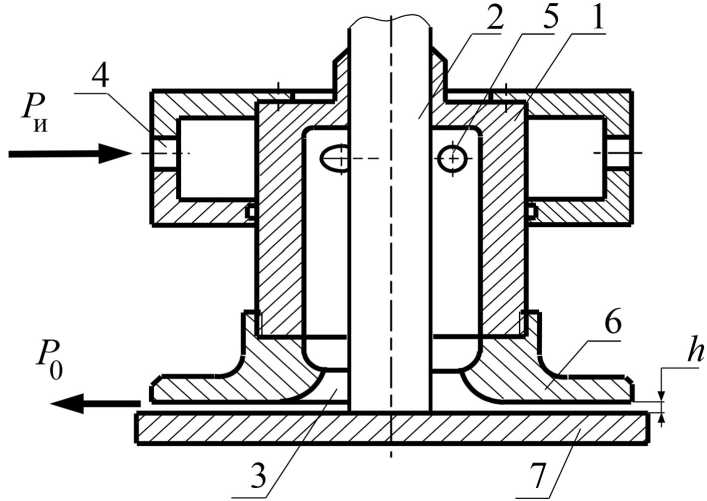
Рис. 7. ВСЗУ с цилиндрической вставкой
Fig. 7. Vortex jet gripper with a cylindrical insert тангенциальные отверстия 5 он попадает в цилиндрическую камеру, где закручивается в кольцевой области, проходит через узкую кольцевую щель 3 в зазор между торцом 6 и заготовкой 7 и истекает в атмосферу. Вставка 2 выступает за торец 6 на величину h, тем самым удерживая заготовку на расстоянии, при котором подъемная сила будет наибольшей. При такой конструкции отверстие, через которое воздух выходит из камеры, меньше диаметра этой камеры, это значит, что максимальное значение Vφ увеличится и сместится к центру, при этом разрежение в центре увеличится, но уменьшится область отрицательных давлений.
Если вставку сделать расширенной книзу (рис. 8), то воздух через узкую кольцевую щель будет истекать горизонтально к поверхности заготовки. Поток воздуха при этом плавно меняет свое направление. Малые величины зазора h б (десятые доли миллиметра) позволяют получить большую радиальную скорость, которая по своему численному значению будет превышать тангенциальную скорость. В ВСЗУ без вставки все наоборот. Составляющими присасывающего действия являются усилие от разрежения при течении радиального потока в зазоре h , усилие от разрежения в центре вихря, усилие от разрежения, возникающего вследствие эжекции струи на торце вставки.
Если сделать вставку 1 с центральным отверстием 2 (рис. 8), то воздух по нему будет отсасываться из области между торцом вставки и поверхностью заготовки 3. Эти массы воздуха будут вовлекаться в процесс вихреобразования в верхней части камеры 4, тем самым увеличивая расход.
Вставку и торец ВСЗУ можно сделать сменными в зависимости от конфигурации деталей. На рис. 9 представлены различные конструкции ВСЗУ, здесь 1 – сменная вставка, 2 – насадка, крепящаяся к нижнему основанию цилиндрической камеры резьбовым соединением или другим приемлемым способом, 3 – деталь различной конфигурации. На рис. 9 приведена небольшая часть возможностей, которые можно реализовать, используя различные по форме вставки и насадки.
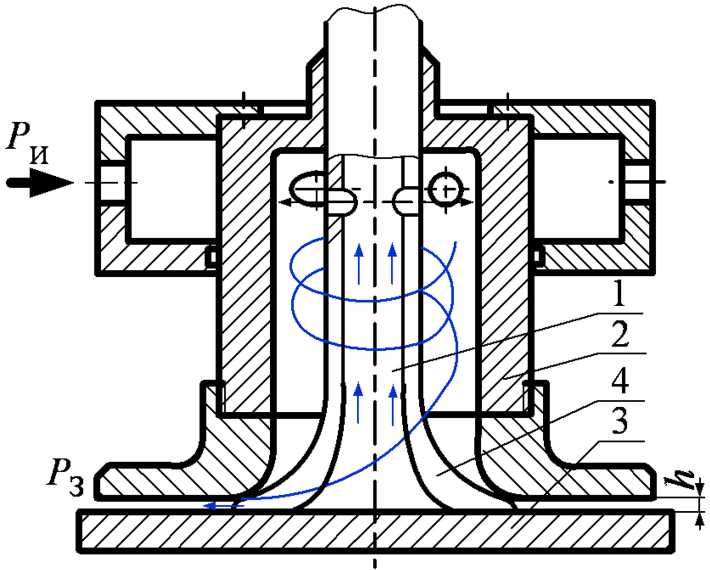
Рис. 8. ВСЗУ со вставкой, имеющей отверстие
Fig. 8. Vortex jet gripping device with an insert having a hole
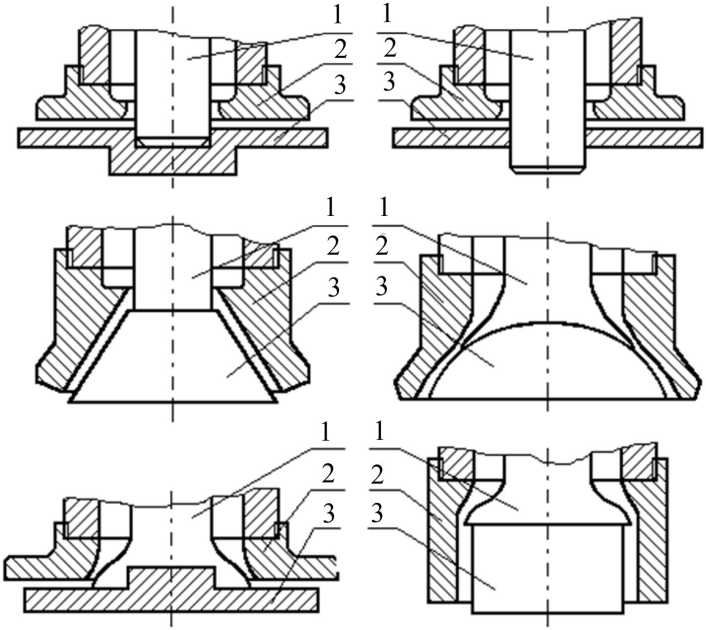
Рис. 9. Схемы ВСЗУ для деталей разной конфигурации
Fig. 9. Vortex jet gripper diagrams for parts of different configurations
Конструкция ВСЗУ позволяет легко осуществлять центрирование деталей, т. к. в процессе захвата деталь совершает колебательное движение, прежде чем занять неподвижное положение.
Заключение
В данной работе рассмотрены закономерности влияния конструктивных схем исполнения вихревых струйных захватных устройств для различных типов захватываемых объектов на их грузоподъемность и геометрические особенности захватываемых объектов. Предложен ряд конструктивных решений, которые позволяют регулировать область и значения отрицательных давлений, что напрямую определяет подъемную силу.
Таким образом, вихревые струйные захватные устройства являются перспективным видом технологического оборудования благодаря их экономичности, конструктивной простоты и эффективности.
Список литературы Принципиальные схемы вихревых струйных захватных устройств для автоматической загрузки технологического оборудования
- Конищева О. В., Брюховецкая Е. В., Кудрявцев И. В. Классификация захватных устройств автоматической загрузки технологического оборудования, Технология машиностроения, 2016, 11, 48-52.
- EDN: YTXNPP
- Патент № 2114782 Российская Федерация, МКИ 7 В 25 J 15/06. Вакуумное грузозахватное устройство: опубл. в БИ № 9 10.07.1998 / Конищева О. В., Конищев В. М.- 6 с.
- Конищева О. В., Синенко Е. Г., Брюховецкая Е. В. Захватные устройства для автоматической загрузки технологического оборудования, Технология машиностроения, 2012, 11, 22-24.
- EDN: PWJZPX
- Конищева О. В., Брюховецкая Е. В. Расчет подъемной силы вихревого струйного захватного устройства (ВСЗУ), Современные технологии. Системный анализ. Моделирование, 2012, 4(36), 57-60.
- EDN: PJKJWJ
- Конищева О. В., Брюховецкая Е. В., Кудрявцев И. В. Исследование закрученной струи газа, истекающей из вихревого струйного захватного устройства на плоскую преграду, Журнал СФУ. Техника и технологии, 2019, 12(2), 171-181.
- EDN: ZCWNWH
- Конищева О. В., Брюховецкая Е. В., Кудрявцев И. В. Использование вихревого и струйного эффектов для захвата и транспортирования объектов, Технология машиностроения, 2018, 7, 47-52.
- EDN: VKHDCG
