Принципы определения координат спутниковой радионавигационной системы

Автор: Шилкина М.В., Курмакаев П.А.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Основной раздел
Статья в выпуске: 6 (49), 2018 года.
Бесплатный доступ
Статья посвящена определения координат спутниковой системы. В ней рассмотрены специальные приемники и можем знать о своем положении в пространстве и во времени. Определение координат GPS-приемника может вычислять расстояние от приемника до нескольких спутников В настоящее время требуется высокая точность определения координат, так же ведутся исследования по улучшению радионавигационной системы.
Gps-приемник, спутниковая радионавигационная система, спутник, координаты, измерение, точность
Короткий адрес: https://sciup.org/140239197
IDR: 140239197
The principles of determining the coordinates of the satellite navigation system
The article is devoted to determining the coordinates of the satellite system. In it special receivers are considered and we can know about our position in space and in time. Determining the coordinates of the GPS receiver can calculate the distance from the receiver to several satellites Currently, high accuracy is required for determining the coordinates, and studies are also being conducted to improve the radionavigation
Текст научной статьи Принципы определения координат спутниковой радионавигационной системы
Спутниковой радионавигационной системой положено называть систему, в которой группировка искусственный спутник Земли выполняет роль опорных радионавигационных точек.
Глобальность систем ГНСС обеспечивается функционированием на орбитах набора видимых из любой точки Земли спутников, непрерывно передающих высокоточные измерительные сигналы. Тем самым вокруг нашей планеты создано как бы информационное координатно-временное поле, находясь в котором пользователь с помощью специального приемника может черпать из него данные о своем положении в пространстве и времени.
Основой идеи определения координат GPS-приемника является вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные содержатся в принятом со спутника альманахе). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется трилатерацией.
Предположим, что объект находится в четырех секундах от спутника А, в шести от спутника В и в восьми от спутника С (рис. 1.1, а). Если часы на спутнике и в приемнике имеют одинаковую точность хода, то точное местоположение на плоскости в принципе может быть найдено, как уже говорилось, по измерениям расстояния до двух спутников. Если же получены измерения с трех спутников, то при одинаковой точности хода часов спутника и приемника круг, описанный радиус-вектором третьего спутника, будет пересекаться с двумя другими в одной точке [1].
Приведенные выше рассуждения были сделаны для случая, когда расстояния от точки наблюдения до спутников известны с абсолютной точностью. Разумеется, некоторая погрешность всегда имеет место (хотя бы по указанной в предыдущем разделе неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и т.п.). Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника.
Однако если часы в приемнике спешат на 1 с, то круги от каждого спутника уже не пересекаются в одной точке (рис. 1.1, б). В этом случае компьютер приемника начинает вычитать (или добавлять) время методом последовательных итераций до тех пор, пока не сведет все три измерения к одной точке (для двух окружностей такое невозможно). После этого вычисляется поправка и делается соответствующее уравнивание по методу наименьших квадратов.
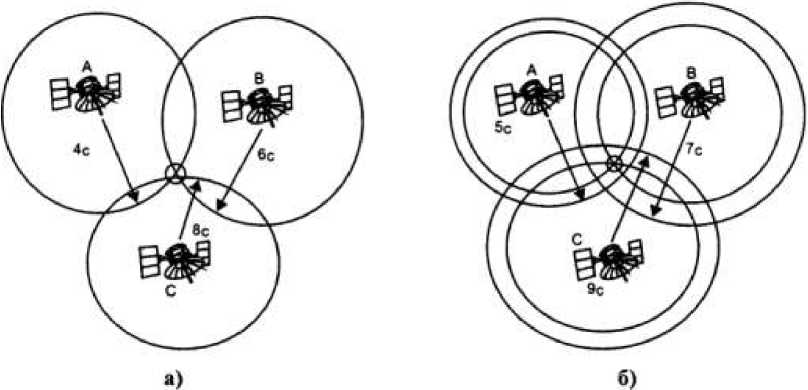
Рис. 1.1 – Определение координат по пересечению сфер
Таким образом, при определении координат на плоскости (широты и долготы) и при неточности хода часов в приемнике проводятся измерения не истинных расстояний, а так называемых псевдодальностей до трех спутников, а при определении трех координат (широты, долготы и высоты) ̶ до четырех.
Кроме того, если необходимо выполнять непрерывное местоопределение в реальном масштабе времени, то, очевидно, целесообразно использовать приемник, имеющий по крайней мере четыре канала (выпускаемые в настоящее время приемники имеют в большинстве случаев 12 каналов) [1].
Конфигурация спутников. В некоторых случаях используется понятие маски по углу возвышения ̶ это угол, отсчитываемый от горизонта, ниже которого спутники не используются. Для работ на участках, где имеются местные препятствия (например, листва деревьев или здания) вероятность точного определения координат существует лишь в том случае, если значение маски возвышения равно или превышает 159. Например, в геодезических GPS-приемниках фирмы Trimble по умолчанию установлено значение маски возвышения 15° для приложений с постобработкой данных и 13° для съемок в реальном времени. Когда спутник находится близко к горизонту, то его сигналы должны пройти значительное расстояние через атмосферу, в результате чего он ослабляется и задерживается, что приводит к возникновению существенной ошибки при вычислении расстояния.
Список литературы Принципы определения координат спутниковой радионавигационной системы
- https://studref.com/320216/tehnika/printsipy_funktsionirovaniya_globalnoy_sputnikovoy_navigatsii
- https://revolution.allbest.ru/radio/00685579_0.html
- http://liseev-ia.narod.ru/Circ/radiostory_Gleyzer.pdf
