Принципы построения и области применения малых космических аппаратов на базе унифицированных космических платформ

Автор: В. М. Кульков, С. О. Фирсюк, А. М. Юров, С. А. Тузиков, Ю. Г. Егоров, С. У. Юн
Журнал: Космические аппараты и технологии.
Рубрика: Инновации и экономика космической отрасли
Статья в выпуске: 2, 2022 года.
Бесплатный доступ
Анализируются варианты построения малоразмерных космических аппаратов на базе унифицированных космических платформ, исследуются области рационального применения унифицированных космических платформ в составе малых космических аппаратов для решения широкого спектра задач, включая мониторинг арктических регионов. Приводятся методические подходы обеспечения проектного анализа схемных решений унифицированных космических платформ для малых космических аппаратов дистанционного зондирования Земли. Исследуется актуальная проблема выбора типоразмера унифицированной космической платформы, оценки эффективности ее использования с учетом необходимой ее модернизации под конкретную полезную нагрузку. Разработаны методика и модели выбора параметров модификации малого космического аппарата дистанционного зондирования Земли. Применение методики позволяет определить рациональные параметры модификации малого космического аппарата дистанционного зондирования Земли, оценить влияние особенностей проектно-конструкторских решений и внешних связей на суммарные затраты при реализации проекта создания унифицированных космических платформ. Актуальность исследований связана с необходимостью создания конкурентоспособных вариантов малоразмерных космических аппаратов на базе унифицированной космической платформы, предназначенных для обеспечения мониторинга высокоширотных регионов с использованием системы малых космических аппаратов.
Малый космический аппарат, унифицированная космическая платформа, модульное построение, конструктивное исполнение, диапазон эффективного применения, дистанционное зондирование Земли, мониторинг высокоширотных регионов
Короткий адрес: https://sciup.org/14123413
IDR: 14123413 | УДК: 629.78 | DOI: 10.26732/j.st.2022.2.08
Principles of construction and application areas of small spacecraft based on unified space platforms
The conceptual options for small spacecraft on the basis of a unified space platform are analyzed, the areas of rational use of the unified space platform as part of the small spacecraft for solving a wide range of tasks, including monitoring of the Arctic regions, are explored. Methodical approaches are given to ensure the design analysis of circuit solutions of the unified space platform for small spacecraft remote sensing. The actual problem of selecting the standard size of the unified space platform, evaluating the effectiveness of its use, taking into account the necessary modernization for a specific payload, is being investigated. A technique and models for selecting the parameters for the modification of the remote sensing satellites have been developed. The application of the methodology makes it possible to determine the rational parameters for modifying the remote sensing spacecraft, to evaluate the impact of the features of design solutions and external relations on the total costs in the implementation of the project for the creation of the unified space platform. The relevance of research is related to the need to create competitive variants of small-sized spacecraft based on a unified space platform, designed to provide monitoring of high-latitude regions using the small spacecraft system.
Текст статьи Принципы построения и области применения малых космических аппаратов на базе унифицированных космических платформ
Применение малых космических аппаратов (МКА) и космических систем на их основе является в настоящее время одной из ведущих тенденций развития космических технологий [1; 2]. Исследуется актуальная проблема разработки предпочтительных вариантов построения малоразмерных космических аппартов (КА) на базе унифицированной космической платформы (УКП), а также методического обеспечения проектного анализа схемных решений реализации функционирования МКА дистанционного зондирования Земли (ДЗЗ) и методов применения техно-
логии микроспутниковых платформ для широкого спектра орбитальных операций с целью решения совокупности природохозяйственных задач ДЗЗ в высокоширотных районах Земли.
Рассматриваются вопросы создания МКА ДЗЗ, позволяющие реализовать требования, предъявляемые к космическим аппаратам радиолокационного и оптико-электронного наблюдения с высоким пространственным разрешением.
Условия функционирования современных МКА ДЗЗ с повышенным сроком активного существования (САС) требуют поддержания и регулярной коррекции их орбит, что делает необходимым использование малогабаритных двигательных установок, способных эффективно работать в условиях ограниченного потребления электроэнергии.
Том 6
Возникает актуальная проблема выбора параметров УКП с электроракетными двигательными установками (ЭРДУ), оценки эффективности ее использования с учетом необходимой ее модернизации под конкретную полезную нагрузку [3-6]. Анализ полученных решений, возможностей адаптации УКП, формирование номенклатуры УКП и наборов требований к ним позволит существенно уменьшить расходы на проектирование и создание МКА, сократить сроки разработки, а также улучшить их характеристики, что положительно скажется на качестве 134 функционирования космической системы МКА ДЗЗ в целом.
Наклонение:
1. Принципы баллистического построения группировки МКА ДЗЗ
cos i = - 73,942 | — I , У n )
где R з – радиус Земли; N – целое число (период кратности), N = 1, 2, 3, ...; n – полное число витков КА в периоде кратности N , n = n пс- N + m ; m - индекс орбиты, m = 0, 1, 2, ..., N – 1 для каждого n пс (здесь n пс – число витков в полетных сутках КА (класс орбиты)).
На рис. 1 приведены параметры круговых кратных ССО, рассчитанные по приведенным выше соотношениям.
Для кратных ССО суточный сдвиг трассы составляет:
L сут
mт
= — 2n R =------ 2 n R =
n nN + m
Одна из областей применения малых спутников – многоспутниковые системы ДЗЗ, где возможности средств выведения на орбиту могут быть эффективно использованы, например, для одновременного развертывания группировки МКА в орбитальной плоскости. Для перспективных МКА ДЗЗ характерно построение орбитальной группировки при равномерном расположении нескольких КА на солнечно-синхронной орбите (ССО) в одной орбитальной плоскости и равномерным распределением орбитальных плоскостей по долготе восходящего узла Ω.
В качестве орбитальных параметров МКА рассматриваются элементы Кеплера:
x = {a, e, ω, Ω, i, u}, где a - большая полуось орбиты; e - эксцентриситет; ю - аргумент перигея; Q - долгота восходящего узла; i – наклонение орбиты; u – аргумент широты МКА.
Математические модели баллистического построения МКА ДЗЗ сформированы с целью определения драконического периода Т др, высоты полета h и наклонения i , ширины полосы обзора A L единичного аппарата ДЗЗ при заданных величинах требуемой периодичности наблюдения Т н и минимальной географической широты региона на поверхности Земли φ [7].
Для круговой кратной солнечно-синхронной орбиты высота (в километрах) определяется формулой:
m IN nnc + m IN
2 n R3 .
h = 42241,121 — I - R3 =
У n )
= 42241,12

2 . m ) 3 +
N )
- 6378,14.
Для того, чтобы ССО кратности К = [ N ; m ] была орбитой полного покрытия региона с широтой выше ф, необходимо и достаточно, чтобы ширина полосы обзора удовлетворяла условию:
> L сут cos Ф _ 2 п R cos ф _ 2 n R cos ф m n nncN + m
На рис. 2 показаны графики зависимости ширины полосы обзора Δ L от индекса орбиты m для различных значений периода кратности N при n пс = 15.
На рис. 3 представлен график зависимости N * от A L для n пс = 15 при m = 0, 1, „., 14.
При выборе орбитального построения надо учитывать ограничение ширины полосы обзора A L * на широте ф * (севернее ф * , равной 60-й параллели северной широты). С учетом этого ограничения можно определить минимальную величину N . На рис. 4 показано семейство решений для минимальной величины N с учетом требований ширины полосы обзора.
В рамках проведенных исследований была выбрана рациональная орбитальная конфигурация спутниковой группировки, позволяющая обеспечить при минимальном количестве МКА N * суточную съемку любой точки арктического региона. В результате формируется зависимость требуемой высоты орбиты h и ширины полосы обзора A L * от параметра N *, который определяется периодичностью наблюдения T н и количеством МКА в составе группировки N КА : N * = T н • N КА .
Выведение спутников орбитальной группировки может осуществляться групповым запуском и разведением их в заданные позиции в орбитальной плоскости путем перехода на орбиту фазирования с последующим возвращением на рабочую орбиту.
Рис. 1. Кратные ССО ( n пс = 15)
Рис. 2. График зависимости ширины полосы обзора Δ L от индекса орбиты m для различных значений периода кратности N ( n пс = 15)
Рис. 3. Минимальный период кратности N * орбиты сплошного покрытия в зависимости от ширины полосы обзора Δ L ( n пс = 15)
Том 6
Рис. 4. Семейства решений для минимальной величины N с учетом требований ширины полосы обзора
Для схемы группового выведения требуемая характеристическая скорость для перелета с рабочей ССО на орбиту фазирования определяется разностью высот ∆h орбиты фазирования и ССО. Для перелета с малой трансверсальной тягой эта характеристическая скорость определяется как разность круговых скоростей на начальной и конечной орбитах:
ЛК хар
Ц rССО
Ц
V r cco + ^ h
где μ = 398600,44 км3/с2 – гравитационный параметр Земли, r ССО – радиус ССО.
Требуемые затраты рабочего тела для перевода МКА с рабочей орбиты на орбиту фазирова- ния определяются соотношением:
m = тмкА (1 - e V'' "эфф), а длительность выведения – соотношением:
A m
^ Тв = рп, т pm где wэфф, m p m – эффективная скорость истечения и массовый расход рабочего тела.
Изменение высоты орбиты при этом соста- в каждой плоскости по аргументу широты u равномерное, обеспечивая мониторинг арктического региона с требуемой периодичностью в течение заданного САС с минимальными затратами.
2. Схемные решения и основные технические особенности УКП
В основу архитектуры УКП закладывается модульный принцип построения аппаратуры на основе компактных модулей с универсальным форматом и интерфейсом, который позволяет оп- тимизировать конструктивное исполнение и сопряжение бортовых радио- и электротехнических систем и ДУ.
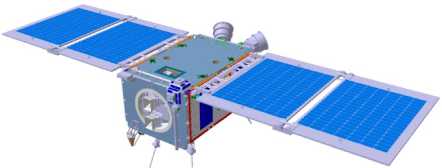
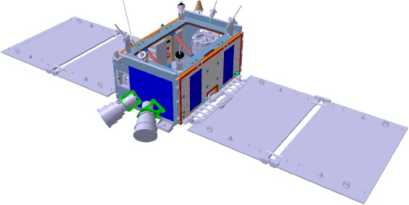
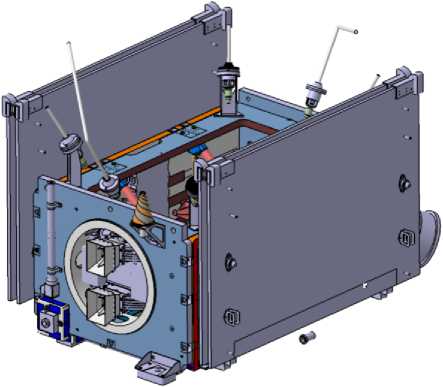
Общий вид 3D-модели УКП в рабочем положении показан на рис. 5.
вит:
^ h =± 2_ F дy :^ T± ® 0 M КА
где F ДУ, M КА – тяга двигательной установки (ДУ) и масса МКА; ω0 – угловая скорость орбитального движения МКА.
Растущие требования к точности поддержания орбитальных параметров МКА, а также к ресурсу и суммарному импульсу тяги ДУ диктуют необходимость применения на МКА ЭРДУ.
Спутники группируются в единой орбитальной структуре, при этом распределение плоскостей по долготе восходящего узла Ω и спутников
б
Рис. 5. Общий вид космической платформы в рабочем положении (со стороны ДУ коррекции ( а ) и со стороны зоны размещения модуля полезной нагрузки ( б ))
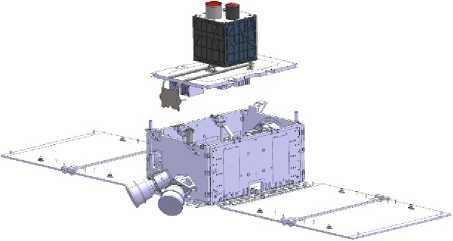
Платформа МКА ДЗЗ состоит из корпуса с установленными в нем блоками служебной аппаратуры. 3D-модель МКА ДЗЗ, состоящего
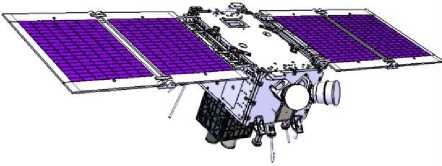
Рис. 6. Общий вид МКА ДЗЗ (общий вид МКА ДЗЗ в рабочем положении ( а ), модульное деление МКА ДЗЗ на платформу и МПН ( б ))
из унифицированной космической платформы и модуля полезной нагрузки (МПН), показана на рис. 6.
б
3. Конструктивное исполнение УКП
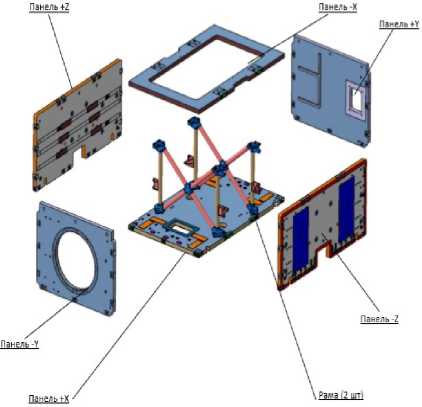
На рис. 7 а представлена 3D-модель корпуса космической платформы с панелями солнечных батарей в транспортном положении. Схема деления конструкции космической платформы представлена на рис. 7 б .
Основным конструктивно-силовым элементом УКП является корпус, выполненный в виде ферменного каркаса четырехгранной формы, на который устанавливаются четыре одинаковых по размеру тепловых сотопанелей с тепловыми трубами внутри. На тепловые сотопанели устанавливается бортовая аппаратура, требующая поддержания определенного теплового режима; на элементах каркаса и тепловых сотопа-нелях крепятся агрегаты ЭРДУ, приводы солнечной батареи, антенны, двигатели-маховики (ДМ) системы ориентации. Выбор схемы разгрузки ДМ определяется размещением ЭРДУ в кормовой части УКП (рис. 7а), обеспечивая создание внешнего управляющего момента за счет отклонения вектора тяги ЭРДУ относительно центра масс МКА.
При модульном построении УКП осуществляется рациональная компоновка блоков аппаратуры на силовых панелях МКА.
а
б
Рис. 7. Конструктивное исполнение УКП
4. Модификация УКП под целевой модуль полезной нагрузки
Основной задачей ДЗЗ арктического региона, решаемой низкоорбитальными МКА, является обеспечение мониторинга с помощью радиолокационной станции на базе радиолокатора с синтезированной апертурой (РСА) [8].
В табл. 1 представлены характеристики РСА, отвечающие этой задаче.
Том 6
Таблица 1
Характеристики РСА
|
Параметр |
Значение |
||
|
Прожекторный режим |
Маршрутный режим |
Обзорный режим |
|
|
Ширина полосы рабочих частот, МГц |
~150 |
||
|
Поляризация |
ГГ, ВВ, ГВ, ВГ |
||
|
Полоса захвата, км |
15 |
20–50 |
100 |
|
Разрешение, м |
3 |
6–10 |
25–50 |
|
Радиометрическая чувствительность, дБ |
-20 |
–20 |
–25 |
|
Полоса обзора, км |
~250 |
||
|
Высота орбиты, км |
400…600 |
||
|
Масса, кг |
~100 |
||
|
Энергопотребление на рабочем участке, Вт |
~1000 |
||
В табл. 2 представлены типовые характери- рой, отвечающие требованиям при создании РСА стики радиолокатора с синтезированной аперту- для малого КА ДЗЗ [8].
Таблица 2
Основные требования к характеристикам РСА для МКА ДЗЗ
|
Характеристика |
Значение |
|
Частотный диапазон |
X , C , S , P |
|
Полосы захвата (для высоты орбиты 500 км), км |
100–150 |
|
Сверхвысокая разрешающая способность (при полосе до 25 км), м |
до 5 |
|
Высокое пространственное разрешение (при ширине полосы 25–75 км), м |
5–15 |
|
Среднее разрешение (при ширине съемки до 100 км), м |
15–50 |
|
Низкое разрешение (при ширине съемки свыше 100 км), м |
свыше 50 |
|
Масса РСА с приводом, кг |
до 100 |
|
Суммарная потребляемая средняя мощность РСА, Вт |
до 500 |
Разработанная 3D-модель платформы МКА ДЗЗ на базе РСА удовлетворяет следующим требованиям:
-
• обеспечивает функционирование размещаемой на ней полезной нагрузки;
-
• построена по модульному принципу и включает модули: систему управления движением (обеспечение требуемых параметров орбиты и заданной ориентации), двигательный модуль в составе системы управления движением МКА ДЗЗ (выдача импульсов тяги, обеспечивающих коррекцию орбиты и позволяющих компенсировать сопротивление атмосферы в течение САС), cистему электроснабжения (обеспечение текущего положительного баланса электрической энергии на борту МКА в течение всего САС);
-
• является совместимой по командам управления с бортовой аппаратурой управления МКА.
Ограниченность массы МКА и мощности их бортовых энергоустановок, а также ограничения, накладываемые на стоимость их создания и эксплуатации, требуют применения малогабаритных, легких и дешевых ЭРДУ, обладающих высокой эффективностью в области потребляемой мощности до 50–100 Вт. При этом потребляемая электрическая мощность ЭРДУ, масса и габаритные размеры должны соответствовать требованиям к платформе МКА ДЗЗ.
Для выполнения высоких требований по точности ориентации и стабилизации обычно используются ДМ, разгрузка которых обеспечивается созданием внешнего управляющего момента за счет отклонения вектора тяги ЭРДУ относительно центра масс МКА.
Обобщенные требования к параметрам космической платформы МКА ДЗЗ с РСА высокого разрешения приведены в табл. 3.
Таблица 3
Основные требования к космической платформе
|
Характеристика |
Значение |
|
Орбита функционирования |
солнечно-синхронная, высота 400–600 км |
|
Срок активного существования на орбите, лет |
до 5 |
|
Точность ориентации, обеспечиваемая системой ориентации и стабилизации, град: |
ориентация трехосная, не более 0,1 |
|
Точность стабилизации по скорости на время съемки, град/с |
не более 0,001 |
|
Среднесуточная мощность системы энергоснабжения, Вт |
не менее 150 |
|
Система коррекции орбиты: – потребляемая мощность, Вт – удельный импульс тяги, кН·с /кг – средняя тяга, мН – суммарный импульс тяги, кН·с – полная масса ЭРДУ с запасом рабочего тела, кг |
ЭРДУ 50–150 10–15 5–10 20–50 до 10 |
|
Масса УКП МКА, кг |
не более 100 |
|
Масса модуля целевой аппаратуры, кг |
не более 50 |
Платформа выбирается под массу выводимой полезной нагрузки (ПН), что определяет предельную массу МКА и мощность его системы энергообеспечения.
Используется модель эффективности МКА, позволяющая на основе базовой платформы МКА разработать МКА ДЗЗ с ПН в некотором диапазоне массы и энергопотребления.
Масса модифицированного МКА имеет следующий вид:
M КМА = M Укп + M Пн +ц Пн ( M Пн - M Пн ) +
+YW (W™ - W™ ) = MКа • KМб, где MКА, MУКП, MПН – масса МКА, УКП и ПН, WПН - энергопотребление ПН, ц^ = M w, / MKA , γW – коэффициент парциальной массы МКА на генерирование электроэнергии,
K Пб = M Ка / M Ка = 1 +
+ц Пн [(1 + ц Пн )( M Пн / M Пн - 1) +
+(kW - i)(wnH / w^ -1)], kW = 1 + Y W " WHH / M ПН •
Индексы «б» и «м» относятся к базовому и модифицированному МКА, соответственно.
5. Исследование диапазона эффективного применения УКП МКА ДЗЗ
Методы проектирования малых космических аппаратов ДЗЗ позволяют оценить эффективность модификаций МКА на базе УКП [9].
Стоимость МКА в значительной мере определяется их массогабаритными характеристиками. Стоимость изготовления МКА составляет:
с = Л • Myu ^изг Au M КА , где MКА – масса МКА в кг; Aи и yи – статистический коэффициент и показатель степени, учитывающие влияние массы МКА на затраты, необходимые для его изготовления [3].
На рис. 8 представлена регрессионная зависимость C изг от массы МКА, полученная в результате анализа статистических данных, приведенных в [1].
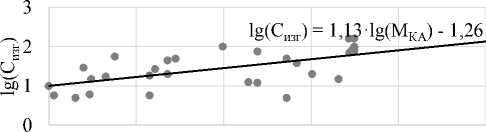
2 2,2 2,4lg(M KA )2,6 2,8 3
Рис. 8. Зависимость стоимости производства МКА C изг от массы МКА M КА
Соотношение для затрат на разработку МКА аналогично по своей структуре соотношениям для определения затрат на производство КА. Для достаточной точности модели в нее введен коэффициент сложности, который зависит от группы аппаратов. Этот коэффициент характеризует технический уровень или степень сложности аппарата [3].
Формула для оценки затрат на разработку: yр ^разр Ap M КА , где МКА – масса КА в кг; Ар – коэффициент затрат; ур – показатель степени, учитывающий влияние
Том 6
массы КА на затраты, необходимые для его разработки.
Для оценки области эффективного применения УКП при проектировании модернизированной УКП, требующей доработки для удовлетворения потребностей новой ПН по массе и энергопотреблению, используется следующая модель [10].
Затраты на модернизацию УКП считаются пропорциональными затратам на разработку МКА:
м разр м разр , где Kм – коэффициент, учитывающий увеличение 140 затрат, связанных с разработкой нового МКА на базе УКП. В результате стоимость модернизации МКА составляет:
С рмазр = K м • А р • M КА .
Эффективность оценивается как удельная стоимость разработки по модернизации МКА:
Е рмазр = С рмазр / M ПН = K м ' А р ' M КА / M ПН •
Оценка области эффективного применения УКП:
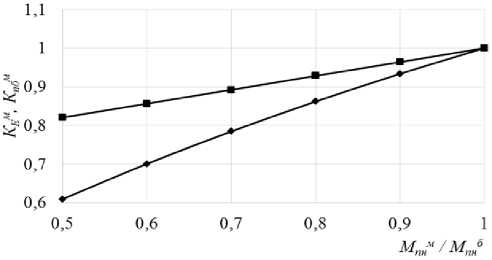
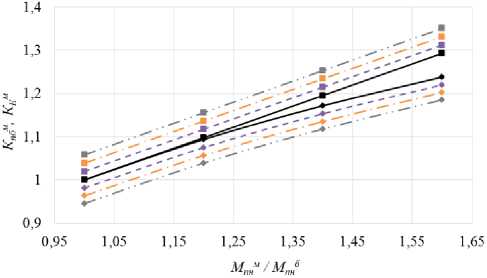
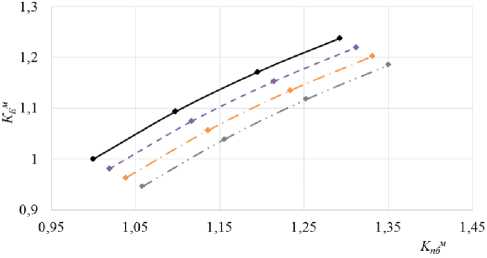
формы для M ПН н M ПН > 1 и W MH н W ,H h > 1 представлены на рис. 10. Зависимость коэффициентов K м (квадратные маркеры) и K м (ромбовидные маркеры) от отношения масс ПН M м / M б и и W м / W б , которые имеют значение 1,0 (сплошная линия), 1,2 (штриховая линия), 1,4 (штрих-пунктирная линия) и 1,6 (штрих-двойная пунктирная линия), соответственно, показана на рис. 10 а . Зависимость коэффициентов K м от соотношения масс МКА K м = M м / M б показана на рис. 10 б .
пб КА КА
а
E б м разр
E м разр
мм M ПН k W
---— * —— бб
M ПН k W
б y р
MVA | =
IMК )
M ПмН
M ПбН
м kW м y р
■ Тб" ’ ( Kпб )
kW
м
> K м K мб.
В зависимости от требований к УКП со стороны МПН рассматриваются следующие характерные случаи оценки диапазона эффективного использования УКП:
1. Создание МКА с МПН, потребности которого в ресурсах с избытком удовлетворяются УКП, допустимо без снижения критерия эффективности при соблюдении ограничений:
К м > К 1 / К бб .
E мм
б
Рис. 9. Зависимость технико-экономических показателей от соотношения массы ПН и МКА (случай 1)
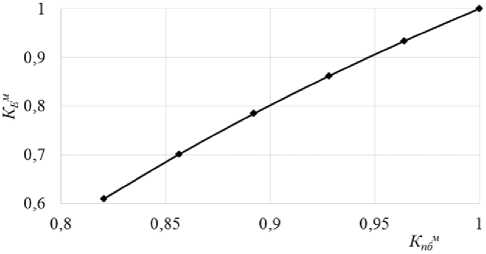
Результаты оценки диапазона эффективного использования УКП базового МКА при развертывании новой УКП для MМн / Mбн < 1 приведены на рис. 9. Зависимость коэффициентов K м (квадратные маркеры) и K м (ромбовидные маркеры) от отношения масс ПН M м / M б представлена на рис. 9а. Зависимость коэффициента K м от соотношения масс МКА K м = M м / M б показана на пб КА КА рис. 9б.
-
2. Создание МКА с МПН, для выполнения требований по массе и энергоемкости которого необходимо доработать УКП, допустимо без снижения критерия эффективности при выполнении следующих ограничений:
K м > К„ 1 / К б . E мм
Результаты оценки диапазона эффективного использования УКП базового МКА при развертывании новой унифицированной космической плат-
Диапазон значений, для которых допустимо использование модифицированной УКП, расположен над кривой:
мм м MПН kW
K E Д^б ' 7 6 '
M ПН kW
M КмА
M КбА
,- у р
= M Пн _ k W z K м г . р
Мб к6 ( пб ) .
M ПН kW
Результаты сравнительного анализа технико-экономических показателей модификации МКА ДЗЗ для базовой и модифицированной УКП приведены в табл. 4.
Итак, создание МКА с МПН, для обеспечения которого в ресурсах требуется модификация УКП, обеспечивается без снижения эффективности при увеличении стоимости разработки МКА до 20 %.
а
Рис. 10. Зависимость технико-экономических показателей от соотношения массы ПН и МКА (случай 2)
б
Таблица 4
Технико-экономические показатели модификации МКА ДЗЗ
|
Величина |
Обозначение |
Значение |
|
Масса МКА |
мб M КА M КА |
1,3 |
|
Масса МПН |
мб ПН ПН |
1,6 |
|
Мощность МПН |
мб ПН ПН |
1,5 |
|
Коэффициент массовых затрат на обеспечение мощности МПН |
мб kW / kW |
1,0 |
|
Критерий эффективности |
K E м |
1,2 |
|
Диапазон коэффициента модификации УКП |
K E ^ к M / к M |
K м ^ 1,2 K м |
|
Затраты на изготовление МКА |
мб C изг / C изг |
1,15 |
|
Затраты на разработку МКА |
C м / C б разр разр |
1,2 |
Заключение
Рассмотрены вопросы выбора типоразмера УКП, оценки эффективности ее использования с учетом необходимости ее модернизации под конкретный МПН.
Разработана методика оценки эффективности применения унифицированной космической платформы, обладающей избыточным ресурсом для полезной нагрузки и модернизированной унифицированной космической платформы, позволяющей обеспечить увеличенные потребности в ресурсах (по массе и энергопотреблению) для полезной нагрузки.
Для решения задачи реализован статистический метод согласованной оптимизации параметров модификации УКП в составе МКА с учетом особенностей проектно-конструкторских и конструкторско-технологических решений заменяемых МПН.
Список литературы Принципы построения и области применения малых космических аппаратов на базе унифицированных космических платформ
- Блинов В. Н., Иванов Н. Н., Сеченов Ю. Н., Шалай В. В. Малые космические аппараты. Кн. 3. Миниспутники. Унифицированные космические платформы для малых космических аппаратов: справоч. пособие. Омск : Изд-во ОмГТУ, 2010. 348 с.
- State-of-Art Small Spacecraft Technology. Small Spacecraft Systems Virtual Institute/Ames Research Center. Moffet Field, California. NASA/TP-20210021263. 2021.
- Кульков В. М. Исследование проектных параметров и анализ эффективности применения унифицированных платформ с электроракетными двигателями в составе малых космических аппаратов // Вестник Московского авиационного института. 2012. Т. 19. № 2. С. 18–28.
- Кульков В. М. Построение комплекса проектных моделей для параметрического анализа малых космических аппаратов с электроракетными двигателями // Вестник Московского авиационного института. 2012. Т. 19. № 4. С. 44–55.
- Kulkov V. M., Egorov Yu. G., Krainov A. M., Shakhanov A. E., Elnikov R. V. On the Problem of Designing Small Spacecraft with Electric Propulsion Power Plants for Studying Minor Bodies of the Solar System // Solar System Research. 2016. vol. 50. no. 7. pp. 533–539.
- Akhmetzhanov R., Bogatyy A., Dyakonov G., Korolyov D., Kashirin D., Popov G., Semenikhin S. Electric Propulsion Thrusters of Next Generation Developed at RIAME MAI for Small Satellites // 7th Russian–German Conference on Electric Propulsion and Their Application. Marburg, Germany. 2018.
- Чернов А. А., Чернявский Г. М. Орбиты спутников дистанционного зондирования Земли. Лекции и упражнения. М. : Радио и связь, 2004. 200 с.
- Верба В. С., Неронский Л. Б., Осипов И. Г., Турук В. Э. Радиолокационные системы землеобзора космического базирования. М. : Радиотехника, 2010. 680 с.
- Матвеев Ю. А., Ламзин В. А., Ламзин В. В. Основы проектирования модификаций космических аппаратов дистанционного зондирования Земли. М. : Изд-во МАИ, 2015. 174 с.
- Чеботарев В. Е., Зимин И. И., Внуков А. А. Исследование диапазонов эффективного применения унифицированных космических платформ для геостационарных спутников связи // Космические аппараты и технологии. 2021. Т. 5. № 1. С. 51–56. doi: 10.26732/j.st.2021.1.06.
