Принципы построения прецизионной системы ориентации и стабилизации космического телескопа

Автор: А. В. Фатеев, Ю. В. Вилков, В. Е. Чеботарев, М. Г. Матыленко, Г. П. Титов
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 4, 2023 года.
Бесплатный доступ
В настоящее время реализуются проекты проведения астрономических исследований с помощью космических телескопов, размещаемых на космических аппаратах. Это обусловлено исключением влияния атмосферных факторов на качество получаемой информации. Однако в этом случае возникает проблема обеспечения точности ориентации оси визирования телескопа относительно объекта наблюдения в течение требуемого периода времени. В статье рассмотрены принципы построения системы ориентации и стабилизации космического телескопа в варианте его жесткой установки на космическом аппарате. Сформулированы требования к точности ориентации, предложен приборный состав и трехступенчатый алгоритм управления ориентацией. Первая ступень алгоритма обеспечивает первичное наведение оси визирования телескопа на целевой объект по информации со звездного датчика и измерителя угловой скорости до попадания в поле обзора телескопа. Вторая ступень алгоритма обеспечивает приведение оси визирования телескопа относительно направления на целевой объект уже по показаниям самого телескопа до величины погрешности, обеспечивающей требуемый охват области наблюдения. Третья ступень алгоритма обеспечивает удержание оси визирования телескопа относительно направления на целевой объект с требуемой точностью в течение экспозиции. Рассмотрены возмущающие факторы от работающих приборов космического аппарата и сформулированы принципы снижения их воздействия на точность визирования. Для создания наиболее благоприятных условий работы научной аппаратуры космического телескопа, а также обеспечения непрерывного информационного контакта космического аппарата с наземными средствами рекомендовано использовать геостационарную орбиту с малым наклонением и эксцентриситетом.
Космический аппарат, космический телескоп, погрешность ориентации, алгоритм управления, система ориентации
Короткий адрес: https://sciup.org/14128603
IDR: 14128603 | УДК: 629.783 | DOI: 10.26732/j.st.2023.4.07
Precision space telescope attitude determination and control system design principles
In order to preclude the impact of atmospheric factors on the quality of received data, state of the art astronomy research projects require spacecraft mounted telescopes. However, such designs entail the issue of sustaining the accuracy of telescope boresight attitude relative to the object of observation for the required period of time. This paper is a summary of design principles for an attitude determination and control system of a space telescope mounted rigidly onboard a spacecraft. The paper formulates requirements for attitude accuracy, and proposes a viable equipment configuration as well as a three- stage attitude control algorithm. The first stage of the algorithm ensures primary boresight pointing towards the target object prior to the object being captured in the telescope’s FoV based on star tracker and angular rate sensor data. The second stage of the algorithm ensures boresight positioning relative to the target object direction up to an error value allowing for the required image quality, based on telescope readings. The third stage of the algorithm ensures telescope boresight holding relative to the target object direction with a required accuracy for the duration of exposure. Interferences from operating satellite equipment are reviewed, and the principles of reducing their impact on sighting accuracy are formulated. Low inclination, low eccentricity geostationary orbit is recommended as the best operating environment for the space telescope’s scientific instrumentation, as well as for providing a continuous data interface between spacecraft and ground segment.
Текст статьи Принципы построения прецизионной системы ориентации и стабилизации космического телескопа
Современная астрономия – сложная разветвленная область знаний, предметом изучения которой являются небесные тела в ближнем и дальнем Космосе, а также количественные и качественные характеристики космического пространства. В практике астрономических исследований используют много различных разновидностей методов и средств получения информации, разделяемых по спектральному диапазону принимаемого излучения: гамма-, рентгеновская-, оптическая-, инфракрасная-, радио-, астрономия. Наиболее освоенная и привычная – оптическая астрономия, предметом которой является научная информация о характеристиках Космоса, полученная посредством оптических систем наблюдения и измерения [1].
Наземные оптические телескопы не позволяют проводить глубокие исследования Космоса по причине свойств земной атмосферы, ограничивающей возможность наземных наблюдений довольно узкими окнами прозрачности. За пределами этих окон наблюдение Космоса с Земли невозможно. С развитием прикладной космонавтики появилась возможность реализации внеатмосферных астрономических измерений повышенного качества во всем спектральном диапазоне с помощью космического оптического телескопа (КОТ), размещаемого на космическом аппарате (КА) в качестве полезной нагрузки.
Критерием эффективности любого КОТ является качество изображений наблюдаемого объекта: разрешающая сила при спектральных наблюдениях точечных объектов или пространственное разрешение прямых изображений точечных объектов, получаемых в процессе наблюдения за небесными телами. Качество изображений зависит не только от характеристик телескопа (апертура, фокус, разрешающая способность и т.д.) [2], но и от точности наведения оси визирования на объект наблюдения и от точности гидирования – точности стабилизации положения изображения наблюдаемого небесного тела во время экспозиции, которая влияет на величину «смаза» (нечеткости) изображения [3].
В свою очередь, точности наведения и стабилизации напрямую зависят от характеристик системы ориентации и стабилизации (СОС) КА, которая отвечает за управление угловым положением КА [4, 5].
Основной характеристикой СОС, влияющей на качество изображения, является погрешность ориентации и стабилизации требуемых осей относительно направления на целевой объект (небесное тело). Поэтому задача по разработке прецизионной СОС, минимизирующая вклад погрешностей ориентации в качество изображений КОТ, в настоящее время является очень актуальной.
Цель данной статьи – рассмотрение основных принципов построения прецизионной СОС, позволяющей минимизировать влияние погрешности ориентации КА (погрешности СОС) на качество изображений КОТ.
1. Формирование требований и выбор приборного состава СОС КА
Схема установки КОТ может быть двух типов: «жесткая» и «мягкая».
В «жесткой» схеме КОТ и КА составляют единое тело. Управление положением КОТ осуществляется только приборами СОС. Достоинством данной схемы является жесткая связь между показаниями телескопа и ориентацией КА, простота исполнения и высокая надежность, а недостатком – влияние вибраций и тепловых деформаций составных частей КА на точность гидирования КОТ.
В «мягкой» схеме КОТ связан кинематическим образом с корпусом КА через систему слежения (собственный двухстепенной привод для телескопа). Управление КОТ осуществляется не толь- ко приборами СОС, но и системой наведения телескопа. Достоинством данной схемы является компенсация влияния вибраций и тепловых деформаций составных частей КА на точность ги-дирования КОТ, а недостатками – сложная схема управления положением оси визирования КОТ, дополнительная погрешность от собственной системы наведения КОТ, снижение надежности системы.
В данной статье рассмотрены принципы построения СОС для «жесткой» схемы КА с КОТ высокого качества изображения и малым угловым полем обзора (10ʹ- 15ʹ).
Поскольку большинство небесных объектов, которые представляют интерес для науки (звезды, галактики и др.), имеют слабую яркость, то для получения качественного изображения объекта с помощью КОТ необходимо накопление энергетического уровня сигнала, то есть определенной величины напряжения (тока) на фоточувствительной матрице [6, 7]. Время накопления сигнала зависит от светочувствительности матрицы КОТ. Поле обзора КОТ и требования по времени экспозиции напрямую обуславливают требования к СОС в части погрешности наведения на целевой объект и продолжительности угловой стабилизации (гидиро-вания) оптических осей КОТ [8]. По проведенным оценкам, исходя из характеристик существующих КОТ, погрешность наведения и удержания (угловая стабилизация) оси визирования КОТ должна быть менее 1ʹʹ.
К разрабатываемым КОТ очень часто помимо целевой задачи по фотографированию объекта предъявляются требования в части выполнения задачи по определению углового положения оси визирования относительно целевого объекта с высокой точностью на уровне десятых долей угловой секунды, что позволяет использовать КОТ в интересах СОС для обеспечения требований по точности наведения и удержания.
Однако использовать только телескоп в качестве основного чувствительного элемента СОС не представляется возможным по следующим причинам:
– угловой размер поля обзора телескопов мал (порядка 15ʹ), что при короткой экспозиции (порядка 1 с) не всегда позволяет определить текущее угловое положение КА в пространстве, так как на некоторых участках звездного неба при таком поле обзора не всегда можно найти достаточное количество опорных звезд с высокой яркостью;
– погрешность определения углового положения оси визирования на уровне десятых долей угловой секунды самим телескопом обеспечивается при малых угловых скоростях вращения КА (менее 10ʹʹ/с.). При повышении угловой скорости вращения КА пропорционально увеличивается погрешность определения углового положения.
Указанные выше факторы приводят к необходимости введения в состав СОС как измерителей угловой скорости, так и оптических приборов высокой точности с большим угловым полем обзора. В качестве оптических приборов предлагается использовать отечественные звездные датчики последнего поколения. Погрешность определения ориентации с помощью таких приборов составляет от нескольких десятых долей угловой секунды до нескольких единиц угловых секунд, что является достаточным для решения задачи наведения оси визирования телескопа на объект [9].
2. Построение алгоритмов управления СОС
Предлагаемый состав чувствительных элементов предопределяет необходимость разработки трехступенчатого алгоритма ориентации (в настоящее время проектируемые СОС работают по одноступенчатому алгоритму управления [10]).
Первая ступень алгоритма заключается в первичном наведении оси визирования КОТ на целевой объект по информации со звездного датчика и измерителя угловой скорости с погрешностью не более половины углового поля обзора телескопа. Такое наведение позволяет гарантированно обеспечить попадание целевого объекта в поле обзора КОТ.
Вторая ступень алгоритма заключается в приведении оси визирования КОТ относительно направления на целевой объект уже по показаниям самого КОТ до величины погрешности, обеспечивающей требуемый охват зоны наблюдения.
Третья ступень алгоритма заключается в обеспечении удержания оси визирования КОТ относительно направления на целевой объект (гидиро-вание) с погрешностью, обеспечивающей минимизацию «смаза» изображения и, как следствие, высокое качество изображения целевого объекта в течение экспозиции.
3. Анализ факторов, влияющих на погрешность СОС в режиме гидирования
Для обеспечения эффективной работы трехступенчатого алгоритма ориентации наряду с чувствительными элементами для СОС необходимо наличие прецизионных исполнительных органов. В настоящее время на КА основными исполнительными органами являются электромеханические исполнительные органы (ЭМИО) типа управляющих двигателей – маховиков (УДМ) или гиродинов. Каждый из этих ЭМИО имеет свои достоинства и недостатки, поэтому выбор ЭМИО для конкретного КА осуществляется в зависимости от условий его применения.
Том 7
УДМ рекомендуется использовать для КОТ, не требующих больших управляющих моментов при перенацеливании. Применение гиродинов для реализации больших управляющих моментов при перенацеливании приводит к увеличению массы по сравнению с УДМ [11].
Необходимо также учитывать наличие на КА ориентируемых на Солнце солнечных батарей с целью обеспечения положительного энергобаланса КА (одностепенные или двухстепенные устройства поворота). Выбор типа привода зависит от параметров орбиты, на которой эксплуатируется КА с КОТ и от возможных положений Солнца по отношению к панелям солнечных батарей в процессе целевой работы (ориентации на небесное тело).
Параметры орбиты КА с КОТ выбираются исходя из обеспечения следующих требований:
-
1. Создание наиболее благоприятных условий работы комплекса научной аппаратуры КОТ, поэтому его эксплуатацию рекомендуется проводить вне радиационных поясов Земли то есть на орбитах с высотой не менее 35000 км [12].
-
2. Обеспечение длительных сеансов связи КА с центром управления в процессе передачи снимков с КА на Землю с обеспечением стабильности параметров потенциала радиолинии.
-
3. Минимизация затрат на выведение КА с КОТ на рабочую орбиту.
-
4. Минимизация затрат рабочего тела на поддержание параметров орбиты и длительности сеансов коррекции орбиты.
Первым трем условиям удовлетворяет геостационарная орбита с суточным периодом обращения и требуемой точкой стояния по гринвичской долготе (ГСО).
Удовлетворение четырех условий обеспечивается геосинхронной орбитой, имеющей суточный период обращения, небольшой эксцентриситет и наклонение (ГСНО).
Так как при движении по ГСНО КА дважды в сутки пересекает экваториальную область, в которой находятся геостационарные спутники, то в целях исключения столкновения с ними рабочую орбиту КА с КОТ рекомендуется выбрать с таким значением эксцентриситета и наклонения, чтобы обеспечить пространственный разнос с КА на ГСО при пересечении плоскости экватора примерно на 300–500 км [13].
Эксплуатация КОТ на орбитах типа ГСНО позволяет для обеспечения положительного энергобаланса использовать одностепенной привод поворота солнечной батареи с учетом дополнительного разворота КА вокруг оси визирования КОТ.
Поскольку АО «РЕШЕТНЁВ» имеет большой опыт по созданию КА для функционирования на ГСО и ГСНО, то первая ступень алгоритма ори- ентации давно уже отработана на существующих КА и не вызывает никаких проблем [10].
В то же время при работе СОС со второй и третьей ступенью алгоритма ориентации на погрешность наведения и удержания оси визирования КОТ относительно целевого объекта начинают оказывать влияние факторы, которые при работе первой ступени алгоритма не учитываются ввиду малой величины вклада в общую погрешность ориентации для первой ступени.
Рассмотрим эти факторы более подробно.
Первый фактор – это компенсация внешних возмущающих моментов средствами УДМ, действующих на КА. Воздействие внешних возмущающих моментов на КА приводит к накоплению кинетического момента на УДМ. В случае достижения максимально возможной величины кинетического момента (данная величина зависит от характеристик УДМ) УДМ перестает отрабатывать угловые отклонения, что приводит к потере ориентации КА. При работе СОС по первой ступени алгоритма ориентации накопление кинетического момента на УДМ парируется приложением внешних управляющих моментов, например реактивными двигателями [14]. Данное парирование называется «разгрузкой» УДМ. В период проведения «разгрузки» УДМ происходит увеличение погрешности ориентации КА. Для исключения влияния «разгрузки» на качество изображения КОТ ее следует проводить вне работы КОТ по целевому назначению.
Второй фактор, вытекающий из первого, – это величина возмущающего момента, оказывающая влияния на стабильность фотометрической матрицы, обусловленная динамическим дисбалансом ротора УДМ. Динамический дисбаланс – неуравновешенность ротора, при которой ось ротора и его главная центральная ось инерции пересекаются не в центре масс или перекрещиваются [15].
Динамический дисбаланс состоит из статического и моментного дисбаланса.
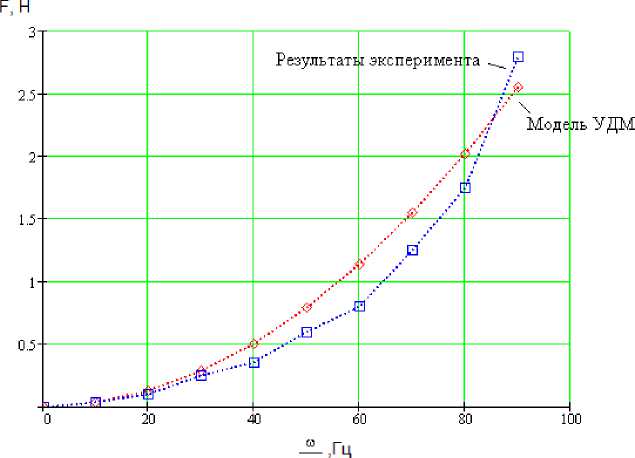
Было проведено моделирование, результаты которого сравнили с экспериментом, проведенным для УДМ в АО «НПО им. С. А. Лавочкина» (рис. 1).
Данная работа позволила верифицировать модель динамического дисбаланса УДМ и показала зависимость возмущающих сил от частоты (скорости) вращения УДМ. Величина углового линейного и углового перемещения матрицы КОТ от дисбаланса УДМ в данной статье не рассматривается, так как результаты моделирования зависят от конкретного УДМ, размеров КА, массы КА и удаленности матрицы телескопа от места установки УДМ и частот собственных колебаний телескопа.
Необходимо отметить, что по результатам моделирования и экспериментов, проводимых в АО «РЕШЕТНЁВ», минимизацию влияния динамического дисбаланса можно осуществить следующими способами:
– снизить скорость (частоту) вращения УДМ до минимально возможной;
– не допускать совпадения частот вращения УДМ с резонансными частотами конструкции КА и телескопа;
– ввести демпфирующие устройства.
Третий фактор – это погрешность ориентации КА, обусловленная вращением панелей солнечных батарей. Данная величина зависит от моментов инерции панелей солнечных батарей и от скорости их вращения. Для исключения влияния данного фактора на качество изображения повороты
2 л
Рис. 1. Зависимость силы динамического дисбаланса УДМ от частоты вращения ротора
солнечных батарей рекомендуется осуществлять в перерывах между экспозициями.
Четвертый фактор – коррекция орбиты с помощью реактивных двигателей, работа которых способствует созданию внешнего паразитного момента, который приводит к накоплению кинетического момента на УДМ. Следовательно, четвертый фактор приводит к появлению первого фактора, рассмотренного выше. Для исключения влияния данного фактора на качество изображения коррекцию орбиты следует проводить вне работы КА по целевому назначению.
Пятый фактор – величина управляющего момента, направленная на компенсацию момента сопротивления УДМ и на компенсацию внешнего возмущающего момента. Поскольку момент сопротивления на валу УДМ зависит от скорости вращения и имеет нелинейную характеристику, то в рамках работы по проектированию СОС был создан алгоритм, оценивающий все возмущающие моменты по показаниям КОТ и формирующий минимально допустимый управляющий момент с учетом его дискретности, позволяющий обеспечить удержание оси визирования КОТ относительно целевого объекта с требуемой по- грешностью.
Шестой фактор – погрешность ориентации, обусловленная нежесткостью конструкции КА. Данная величина зависит от множества факторов, но в части СОС зависит от ускорения, создаваемого УДМ в процессе ориентации. Для минимизации влияния данного фактора на качество изображения рекомендуется уменьшить величину управляющего воздействия УДМ до минимально возможной (зависит от пятого фактора).
4. Рекомендации по построению и эксплуатации КА с КОТ
Для минимизации влияния погрешности ориентации на качество снимков КОТ рекомендуется:
– использовать геосинхронную орбиту с суточным периодом обращения, небольшим эксцентриситетом и наклонением;
– в качестве основных чувствительных элементов СОС при ориентации оптической оси визирования телескопа на целевой объект использовать комбинацию, состоящую из звездного прибора высокой точности, датчика измерения угловых скоростей по всем трем осям и самого телескопа, выполняющего функцию гида (звездного датчика) в интересах СОС;
– в качестве управляющих органов использовать УДМ, момент сопротивления и динамиче-
Том 7
ский дисбаланс которого необходимо оценивать как на заводе-изготовителе, так и при эксплуатации КА на орбите и при необходимости минимизировать как алгоритмическими, так и физическими способами;
– разгрузку УДМ осуществлять вне режима фотосъемки целевого объекта;
– исключить вращение панелей солнечных батарей в период проведения фотосъемки целевого объекта или хотя бы в период проведения одной экспозиции;
– коррекцию орбиты осуществлять вне режима фотосъемки целевого объекта.
Заключение
-
1. В данной статье сформулирована актуальная задача обеспечения точности ориентации оси визирования космического оптического телескопа относительно объекта наблюдения в течение требуемого периода времени.
-
2. В варианте «жесткой» установки телескопа на космическом аппарате определены принципы построения системы ориентации и стабилизации космического телескопа, сформулированы требования к точности ориентации, выбран приборный состав.
-
3. Предложен трехступенчатый алгоритм управления ориентацией, включающий:
– первичное наведение оси визирования телескопа на целевой объект по информации со звездного датчика и измерителя угловой скорости до попадания в поле обзора телескопа;
– приведение оси визирования телескопа относительно направления на целевой объект уже по показаниям самого телескопа до величины погрешности, обеспечивающей требуемый охват области наблюдения;
– удержание оси визирования телескопа относительно направления на целевой объект с требуемой точностью в течение экспозиции, обеспечивающей минимизацию «смаза» изображения.
-
4. Рассмотрены возмущающие факторы от работающих приборов КА и сформулированы принципы снижения их воздействия на точность визирования.
-
5. Для создания наиболее благоприятных условий работы научной аппаратуры космического телескопа, а также обеспечения непрерывного информационного контакта КА с наземными средствами рекомендовано использовать геосинхронную орбиту с суточным периодом, малым наклонением и эксцентриситетом.
Список литературы Принципы построения прецизионной системы ориентации и стабилизации космического телескопа
- Шустов Б. М., Сачков М. Е., Боярчук А. А. Космические перспективы изучения ультрафиолетовой вселенной: проект «Спектр-УФ» // Вестник ФГУП НПО им. С. А. Лавочкина. 2014. № 5. С. 4–15.
- Засов А. В., Постнов К. А. Общая астрофизика: учебное пособие. ДМК Пресс, 2022. 573 с.
- Артеменко Ю. Н., Саяпин С. Н. Синтез механизмов ориентации космического телескопа «Миллиметрон». 4. Концепция построения интеллектуальной системы активной виброзащиты и высокоточного наведения космического телескопа «Миллиметрон». Научное издание МГТУ им. Н. Э. Баумана. Наука и образование. Электронный научно- технический журнал. 06.06.2013.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие. Сиб. гос. аэрокосмич. ун-т. Красноярск, 2011. 488 с., с ил.
- Разработка систем космических аппаратов / Под ред. П. Фортескью, Г. Суайнерда, Д. Старка; Пер. с англ. М.: Альпина Паблишер, 2015. 766 с.
- Астрономический календарь. Постоянная часть. М., 1981. 728 с. с ил.
- Аллен К. У. Астрофизические величины // Под ред. Д. Я. Мартынова, Пер. с англ. М.: МИР, 1977. 446 с.
- Автоматические космические аппараты для фундаментальных и прикладных научных исследований / Под общ. ред. д.т.н., проф. Г. М. Полищука и д.т.н., проф. К. М. Пичхадзе. М.: Изд-во МАИ-ПРИНТ, 2010. 659 с.
- Беляев Б. Б., Ульяшин А. И., Ковалев Ф. А. Система точного гидирования // Вестник ФГУП НПО им. С. А. Лавочкина. 2014. № 5. С. 108–113.
- Раевский В. А., Монахов В. В., Глазунов А. Ф. Цифровая система ориентации и стабилизации геостационарного спутника-ретранслятора «Луч». Космические вехи: сборник научных трудов, посвященный 50-летию создания ОАО «ИСС» имени академика М. Ф. Решетнева. Красноярск: ИП Суховольская Ю. П., 2009. C. 139–145.
- Каргу Л. И. Системы угловой стабилизации космических аппаратов. М: Машиностроение, 1980. C. 47–117.
- Шустов Б. М., Сачков М. Е. Научные задачи проекта «СПЕКТР-УФ» // Вестник ФГУП НПО им. С. А. Лавочкина. 2013. № 3. С. 8–15.
- Шейхет А. И., Корноухов В. С., Моишев А. А. Выбор начальных параметров рабочей орбиты космического аппарата «Спектр-УФ» // Вестник ФГУП НПО им. С. А. Лавочкина. 2014. № 5. С. 20–23.
- Патент РФ № 2 648 906 С2 МПК B 64G 1/28. Способ разгрузки управляющих двигателей – маховиков космического аппарата. Заявка № 2016111211 от 25.03.2016 / Бюл., 2017. – № 28 / Фатеев А. В., Тентилов Ю. А., Васильев А. А.
- ГОСТ 19534–74. Балансировка вращающихся тел. М., 1974. 49 с.
