Проблемы диагностики многотактных автоматов

Автор: Коптев Анатолий Никитович, Коваленко Юлия Витальевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 6-3 т.15, 2013 года.
Бесплатный доступ
В статье рассматривается задача анализа объектов контроля бортовых систем на базе использования программ для проверки аппаратуры. Реализация такого метода осуществляется за счет отождествления неисправностей объекта контроля с подавтоматом и проведения над ним мысленных экспериментов. В работе представлен метод реализации анализа объектов контроля на примере реального бортового устройства (автомата) с применением технологии тензорного исчисления для синтеза программы контроля многотактного автомата.
Организация контроля и диагностики, конечный автомат, эксперименты мура, тензорный подход представления объектов контроля
Короткий адрес: https://sciup.org/148202629
IDR: 148202629 | УДК: 681.142.001
Problems diagnostics multicycle machines
The article deals with the task of onboard systems control objects analyzing, based on the using of programs for equipment test. Realization of this method is carried out by identifying control object faults with subautomat and holding it over the ментиал experiments. The paper presents the method of the implementation analysis of control objects on the example of a real onboard device (machine ) with using tensor calculation technology for the synthesis of multiple machine control program.
Текст научной статьи Проблемы диагностики многотактных автоматов
Э.Ф. Мура [1], Р.Р. Убара [2], А.Н. Коптева, В.А. Прилепского [3]. При обсуждении мы будем иметь в виду организацию контроля и диагностики, приведенную на рис. 1.
Многие фундаментальные идеи о контроле и диагностике можно выразить в терминах мысленных экспериментов Мура [1]. При этом предполагается, что автомат – это «черный ящик», имеющий входные и выходные устройства (для нашего примера сетевые и штепсельные разъемы). В процессе эксперимента над входами и выходами устанавливается поведение черного ящика, прикладывая последовательности входных воздействий (стимулов) и наблюдая выходные реакции.
В рамках работы [1] предполагается наличие двух типов мысленных экспериментов: простые и кратные.
Простой эксперимент дает абстрактную модель процесса испытаний. Эксперимент второго типа предполагает наличие нескольких копий одного и того же автомата, исходя из полученных реакций, экспериментатор может вывести заключение об их внутренней структуре путем приложений одних и тех же входных воздействий для различных копий, отражающих одну из n допустимых неисправностей. То есть подавтоматы суть копии неисправного автомата, показывающие ожидаемые реакции, объединяются, образуя класс эквивалентности. Совокупность полученных таким образом классов эквивалентности определяет техническое состояние объекта контроля. Следовательно, с точки зрения кратного мысленного эксперимента входное воздействие эксперимента обнаруживает неисправность с максимальным диагностическим разрешениям, соответствующим окончательному разбиению подавтоматов автомата, когда каждый из них отражает точно один вид неисправности.

Рис. 1. Общая организация контроля и диагностики
Резюмируя выше изложенное, можно сказать, что идея отождествления подавтоматов с неисправностью позволяет нам сформулировать ряд идей в диагностике неисправностей в терминах мысленных экспериментов Мура. Эти формулировки служат идейной основой для программы контроля и испытаний автоматов или объектов контроля (ОК).
Для получения такой программы необходимо определить последовательность входных воздействий на ОК и реакцию на них. Тогда реакция подавтоматов на входные воздействия есть реализация процесса контроля, который будем называть моделированием неисправностей. Одной из центральных проблем моделирования неисправностей для получения последовательности воздействий на подавтомат ОК с целью обнаружения неисправности в последовательностной схеме является проблема описания ОК, которое не должно иметь практических ограничений на сложность объекта. Перечисленные выше подходы в рамках теории конечных автоматов этим требованиям не удовлетворяют.
В настоящей статье эта проблема рассматривается на основе тензорного подхода, базирующегося на работах [4, 5].
Задача представления объектов контроля ставится и решается в соответствии с методологией исследования сложных систем, то есть описание ОК строится так, чтобы оно привело к продвижению в понимании функционирования системы «система контроля – объект контроля» («СК» - «ОК»).
При анализе ОК выделено несколько этапов:
-
1. Замена реальных соединений элементов ОК тензором соединений С, который физически представляется посредством проводников, соеди-
- няющих различные элементы этого объекта.
-
2. Тензор соединений С представляется как метатензор C’.
-
3. Вводится в рассмотрение фиктивная «метасеть».
-
4. Определяется тензор преобразования «метасети».
-
5. Определяется тензор преобразования тока.
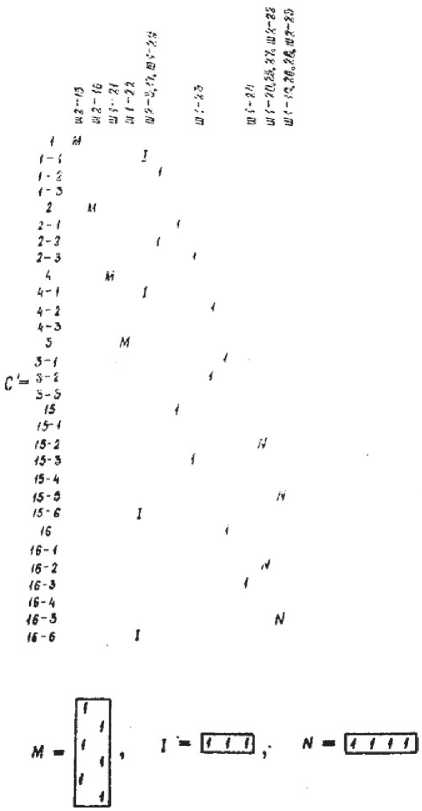
Используя алгоритмы построения тензоров соединений, разбиения объектов на функциональные модули [5], на конкретном примере одного из полученных модулей демонстрируется методика анализа, которая затем прошла успешную проверку на комплексах ЭТО ЛА самолетов Ту-154, Ан-124, широко внедряется в производство ЭТО ЛА самолетов третьего поколения Ту-204. Реализация этапов 1-5 для функционального модуля РК загружателей (рис. 2-4) наглядно представляется табл. 1, рис. 3-4.
Учитывая равносильность преобразований, получаем
С = C = C” = C . (1)
m
В качестве универсального индикатора при контроле объектов в работе выбран ток, который при различных преобразованиях определяется соотношением i=C i’ , (2)
где С – тензор преобразования тока, i’ – известные токи цепей. Этим же соотношением определяются токи в системе «СК» - «ОК».
Решение задачи моделирования внешних связей ОК позволяет определить проводимость электрических цепей, подготовленных для взаимодействия с СК, и построить матрицу С, показывающую соотношения между токами элементарной сети и новой сети с теми же компонентами, по новым путям токов.
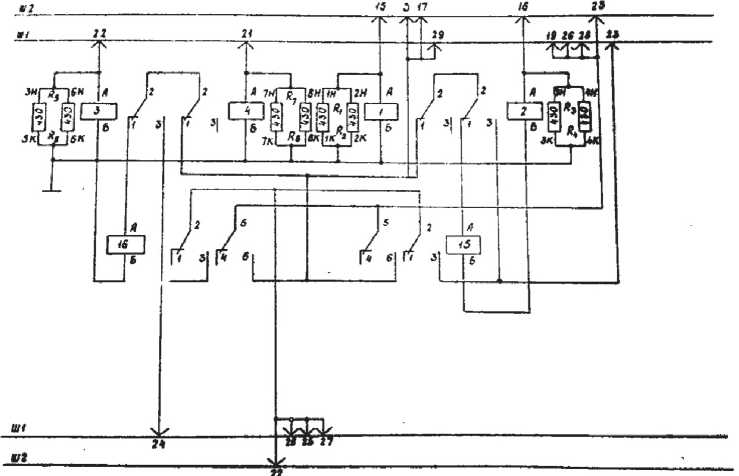
Рис. 2. Функциональный модуль РК загружателей
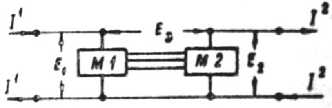
Рис. 3. Метасеть функционального модуля
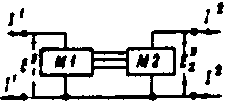
Рис. 4. Преобразованная метасеть функционального модуля
Таблица 1.
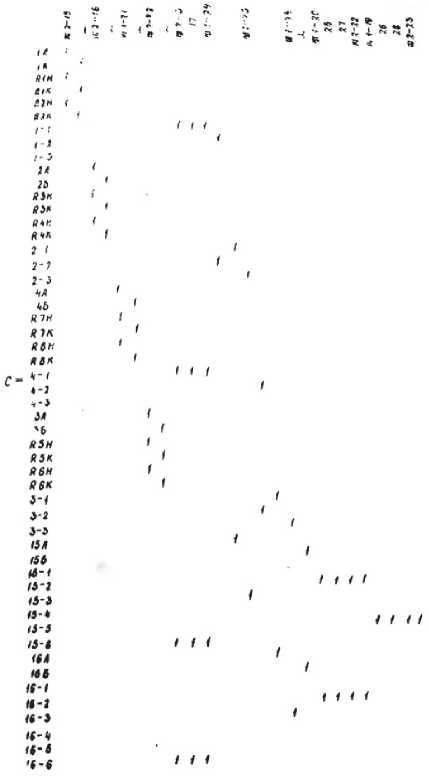
Таблица 2.
F-
if

I
N
N
I
Применение технологии тензорной методологии синтеза тестовой информации, как последовательности этапов проведения преобразований, позволяющих использовать тензоры для синтеза этой информации охватывает этапы: декомпозиции ОК, установления матрицы соединений С, ее аналитического исследования с целью выделения подборок и электрических цепей, моделирования внешних связей, установления тензора сопротивления r для отдельных компонент цепи и матрицы C’, преобразующей элементарную сеть в действительную, определения тензора сопротивлений r’ реальной сети ОК по формуле преобразования r’=Ct•r•C (r и r’ – соответственно компоненты элементарной и реальной сети ОК, С и Ct– соответственно матрица и транспонированная матрица соединения компонент), определение вектора приложенного
Таблица 3.
напряжения по формуле преобразования e’=Ct•е (е и e’ – соответственно напряжения, приложенные к компонентам элементарной и реальной сети ОК), определения вектора тока, осуществляемого по формуле (2), вывода уравнения поведения ОК на базе трех физических величин i, r, e элементарной сети ОК.
Синтез тестовой информации тесно связан с задачей минимизации этой информации. Разработанные теоретические и алгоритмические основы минимизации тестовой информации базируются на ряде понятий и определений (вектора состояния, преобразования вектора состояния, продольное и поперечное множество векторов, прообраз и образ операционного и основного преобразования, поперечных совокупностей и преобразований, поперечной цепи и ее преобразований), на общем подходе к выбору количественной оценки показателя, когда ОК рассматривается как система, включающая и ОК, и соотношения, введенные на нем:
~
А = (A,I k ,(k е K)), (3)
где A={a1, a2, …, an} – множество с фиксированной
Таблица 4.
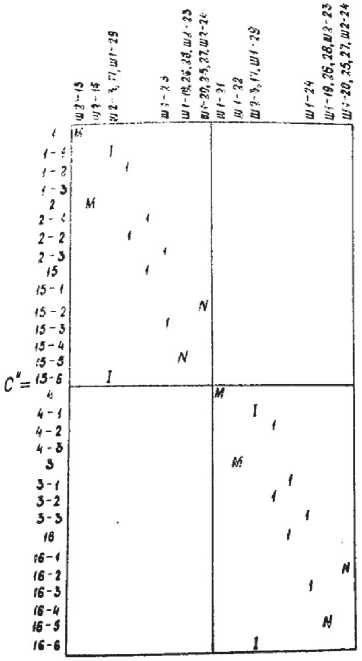
Таблица 5.
нумерацией состояний ОК ai, Ii(i=1, 2, …, N), I={I1, I2,…, In} N – мерный вектор оценки состояния. Для количественной оценки показателей строится система ~
Х = (Х,P k ,(k е K)), (4)
где Х – множество вещественных чисел, сk – отношение между числами.
Для однозначного ответа на вопрос о числе преобразований, требуемых для описания одного вектора в поперечной цепи, сформулированы и доказаны теоремы: о числе преобразований, числе описательных преобразований, необходимых для идентификации выделенного вектора.
Список литературы Проблемы диагностики многотактных автоматов
- Гилл А. Введение в теорию конечных автоматов [пер. с англ.: А.Т. Дауровой, А.П. Евсеевой: под ред. П.П. Пархоменко]. М.: Наука, 1966. 272 с.
- Убар Р.Р. Анализ диагностических тестов для комбинационных логических схем методом обратного прослеживания неисправностей//Автоматика и телемеханика, 1977. №8. С.168-176.
- Система автоматизированного проектирования технологических процессов монтажа, контроля и испытаний электротехнического оборудования. Состояние и перспективы развития производства автоматизированного технологического оборудования для контроля и испытаний бортовых систем/В.А.Прилепский, А.Н. Коптев, Н.Ф. Арцытов. М.: НИАТ, 1987. С.49-52.
- Монтаж, контроль и испытания электротехнического оборудования ЛА/А.Н. Коптев, А.А. Миненков, Б.Н. Марьин, Ю.Л. Иванов. М.: Машиностроение, 1998. 296 с.
- Коптев А.Н. Гибкие автоматизированные производственные системы монтажа контроля и испытаний электротехнического оборудования летательных аппаратов. Автореф. дисс. … докт. техн. наук. Самара, 1990. 50 с.
