Проблемы и решения проектирования микропроцессорных модулей навигационной аппаратуры пользователей ГЛОНАСС

Автор: Шайдуров В.В., Вейсов Е.А., Непомнящий О.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (25), 2009 года.
Бесплатный доступ
Рассмотрена история развития ведущих систем спутниковой навигации. Проведен анализ состояния проблем в области проектирования и внедрения связных абонентских терминалов ГЛОНАСС. Выявлены проблемы оперативной разработки сверхбольших интегральных схем для ГЛОНАСС. Предложены решения по сокращению сроков проектирования, повышению качества и достоверности информации навигационных приемников за счет расширения вычислительных возможностей встраиваемых микропроцессорных компонентов. Предложена структура интегрированного навигационного процессора параллельной обработки сигнала. Описаны пути развития и намечены перспективы глобального охвата и внедрения навигационных систем.
Космический, навигация, система на кристалле, микропроцессор, спутник, глонасс
Короткий адрес: https://sciup.org/148176021
IDR: 148176021 | УДК: У
Problems and decisions of designing of microprocessor modules of navigating equipment of users GLONASS
The short history of creation and current state of problems in the field of satellite navigation is considered, systems GPS and GLONASS in particular are considered. The basic problems of development GLONASS are allocated and decisions of the marked problems are offered. The problem of designing of navigating receivers is considered. The basic ways of the decision are allocated at designing of the big integrated schemes and microprocessor modules of management by the receiver of satellite navigation. The structure and structure of the integrated microprocessor for management of the navigating receiver capable to conduct reception of signals in four systems is offered: GPS, Galoleo, Bejdou and GLONASS. The basic ways of development GLONASS in the light of globalisation of satellite navigation on a global scale are planned.
Текст краткого сообщения Проблемы и решения проектирования микропроцессорных модулей навигационной аппаратуры пользователей ГЛОНАСС
Сложная и неоднозначная история развития навигационных систем GPS (США) и ГЛОНАСС (Россия) насчитывает несколько десятков лет.
Идея создания GPS ( Global Positioning System ) зародилось в начале 1960-х гг. К концу 1960-х гг. возникла предшественница GPS – система TRANSIT. С 1978–1986 гг. была создана первая группировка спутников GPS – NAVSTAR ( NAVigation Satellite providing Time And Range ). И, наконец, с 1989 по 1994 гг. произошло окончательное формирование современной конфигурации этой системы.
Глобальная спутниковая навигационная система (ГЛОНАСС) начинает свой отсчет с 1957 г., когда был создан первый искусственный спутник Земли. В 1970 г. появились предшественницы ГЛОНАСС – системы «Цик-лон-Б» и «Цикада». Годом начала работы над ГЛОНАСС стал 1976 г. В 1982 г. был запущен первый спутник, а 1993 г. введена в строй первая очередь системы.
В настоящее время основной проблемой реализации ГЛОНАСС является задача развертывания орбитальной группировки. На сегодняшний день только 13 из 24 навигационных космических аппаратов (НКА) действуют и 3 находятся на стадии технического обслуживания [1].
Развитие ГЛОНАСС является одной из наиболее приоритетных программ Роскосмоса. Система глобальной навигационной спутниковой связи, помимо стратегических и оборонных целей, важна для России как опорный пункт для вывода отечественной микроэлектронной промышленности на новый уровень.
Для обеспечения национальной и информационной безопасности Президентом Российской Федерации В. В. Путиным 11 апреля 2002 г. были утверждены «Основы политики Российской Федерации в области развития электронной компонентной базы на период до 2010 г. и дальнейшую перспективу».
В частности, в Российской Федерации нет программы развития навигационной аппаратуры пользователей (НАП) и в настоящее время всего несколько предприятий могут предложить ГЛОНАСС-модули для разработчиков НАП. Однако при этом миллиарды рублей тратятся на космический сектор ГЛОНАСС-программы, а НАП уделяется значительно меньше внимания.
Существует серьезные проблемы, связанные с проектированием ГЛОНАСС-чипов. Сегодня в нашей стране они практически не производятся, так как российские центры проектирования микроэлектронной аппаратуры не в состоянии конкурировать с зарубежными разработчиками, котор ые работают с проектными нормами 0,09...0,065 мкм и менее. Такая технология необходима для создания энергосберегающего, высокопроизводительного ГЛОНАСС-приемника типа «система в корпусе» ( Sуstem in Package , SiP), хотя ведущие мировые электронные компании уже давно работают с GPS-чипами на основе сверхбольших интегральных схем (СБИС) типа «система на кристалле» ( System on Chip , SoC), в разработку которых вложены миллиарды долларов (табл. 1) [2].
Неуклонно расширяющаяся сфера применения спутниковой навигации диктует свои требования к аппаратуре пользовательских терминалов, среди которых особое значение начинают приобретать требования к снижению энергопотребления, поскольку речь идет о мобильных системах. В таком аспекте система в корпусе, состоящая из нескольких СБИС, теряет актуальность, а главная роль начинает отводится однокристальной SoC.
Российские ГЛОНАСС-приемники изготавливаются в виде микросборок типа «система в корпусе» на основе зарубежных чипов и практически не предназначены для автономных мобильных устройств (табл. 2) [2]. Более того, такие модули не могут быть допущены к применению в военных и стратегических целях.
Основные модули ГЛОНАСС-приемников выполняются в виде заказных СБИС с дополнительными интерфейсными схемами. Таким образом, здесь на первый план выходят проблемы, связанные с технологией производства систем на кристалле.
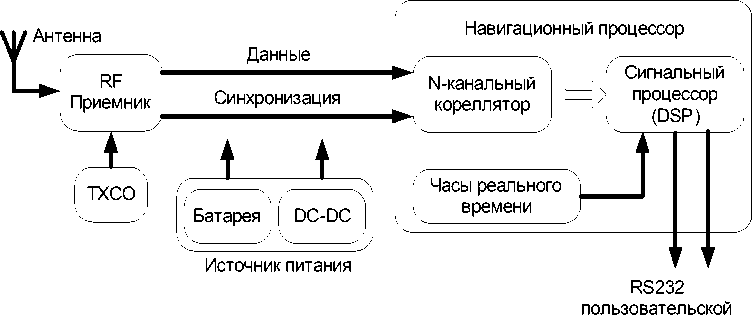
В общем случае источником сигнала для такого приемника является антенна, посредством которой электрический сигнал поступает на RF-радиоприемник с функцией оцифровки сигнала и далее на навигационный процессор, реализованный на заказных СБИС, который выполняет функции слежения за сигналом и его обработку (рис. 1). В этот модуль также входит связной модем асинхронного обмена данными с пользовательской системой, куда передаются определяемые координаты, рассчитываемые скорости и углы. Пользовательские приложения формируются на основании полученных данных в зависимости от назначения приемника или системы в целом.
Неуклонное повышение требований к точности и качеству навигационных данных выдвинуло новые требования к составу процессорного ядра.
На сегодняшний день ведущие аналитики в данной области пришли к единому мнению, что совместное использование нескольких навигационных систем является одним из наиболее обоснованных методов повышения точности навигации [3]. Это означает, что процессорное ядро должно содержать, как минимум, два канала параллельной обработки информации, например GPS и ГЛОНАСС. Действительно, такой подход хорошо зарекомендовал себя на пользовательском рынке навигационных услуг. Более того, анонсированы чипы с поддержкой трех спутниковых навигационных систем: американской GPS, европейской Galileo и российской ГЛОНАСС [4]. Ведутся работы по разработке четырехканальных систем [5]. Но и в данном направлении существуют большие проблемы.
Дело в том, что система ГЛОНАСС изначально проектировалась и создавалась без учета обеспечения ее совместимости c GPS и другими системами. Изменения в политике использования глобальных спутниковых систем, а также объективная необходимость использования GPS-сигналов при отсутствии собственной полноценной орбитальной группировки привели к необходимости внесения определенных корректировок в ряд изначально заложенных идей [1].
Одна из таких проблем связана с синхронизацией принципиально различных шкал времени, используемых в системах GPS и ГЛОНАСС. В частности, добавление целой секунды к шкале времени, периодически производящееся в системе ГЛОНАСС, приводит к значительному усложнению логики работы пользовательских приемников. И эта проблема будет только усложняться при подключении дополнительных систем. Следовательно, расширение каналов приемника до четырех (GPS, ГЛОНАСС, Galileo и Бэйдоу) будет связано с четырехкратным и даже более увеличением вычислительных мощностей процессорного блока.
Разумеется, что интегрированные процессоры обработки данных потребуют новых подходов к проектированию, в первую очередь направленных на сокращение сроков выполнения проекта.
Один из таких подходов основан на использовании высокоуровневого проектирования микропроцессорных систем со сложной многопроцессорной структурой. Здесь необходимо применение уже готовых (отработанных) блоков описания аппаратуры, например модулей интеллектуальной собственности IP ( Intelligent Property Core ), причем не только IP-процессорных блоков, но и модулей цифровой логики. На сегодняшний день на рынке присутствуют программные IP-блоки ( Soft Blocks ) – блоки, специфицированные на языке описания аппаратуры, схемотехнические блоки ( Firm Blocks ) – блоки, специфицированные на схемотехническом уровне без привязки к конкретной топологической реализации, и физические (топологические) блоки ( Hards Blocs ) – блоки,
Таблица 1
Характеристики GPS-чипов разных производителей
|
Интегральная микросхема (ИМС) |
SiRFstarIII GSC3LT |
Fujitsu MB15H156 + MB87 Q2040 |
uNav uN1008 + uN2110 |
STmicro STA2056 |
Atmel ATR0635 |
|
Конфигурация |
SiP |
2 ИМС |
2 ИМС |
SoC |
SiP |
|
Техпроцесс |
RFCMOS + + CMOS |
RFBiCMOS + CMOS |
RFCMOS + + CMOS |
RFCMOS |
RFBiCMOS + + CMOS |
|
Корпус |
TFBGA-153 7 × 7 |
BCC-32 5 × 5 + BCC-48 7 × 7 |
QFN-28 4 × 4 + + BGA-49 8,5 × 8,5 |
QFPN-68 10 × 10 |
BGA-96 7 × 10 |
|
Энергопотребление, мВт |
50 |
110 |
49 |
120 |
62 |
|
Чувствительность, дБм |
–159 |
–157 |
– |
–147 |
–158 |
|
Холодный старт, с |
35 |
40 |
40 |
90 |
34 |
|
DSP-ядро |
ARM7TDM1 |
ARM7TDM1 |
VS-DSP |
ARM7TDM1 |
ARM7TDM1 |
Таблица 2
Краткие характеристики выпускаемых в России ГЛОНАСС/GPS-приемников
В настоящее время российскими производителями закупаются IP-модули, являющиеся интеллектуальной собственностью зарубежных корпораций. Затем на базе импортных СБИС с программируемой логикой проектируется GPS/ГЛОНАСС-чип SoC и уже на его основе строится SiP для нужд ГЛОНАСС. Но спроектированные устройства (их архитектурные и схемотехнические решения, микроэлектроника) не являются отечественными разработками, что в свою очередь создает большие трудности, связанные с использованием таких модулей в крупномасштабных и стратегических целях.
Разрешение этой проблемы необходимо начинать с накопления опыта проектирования чипов технологических размеров 90 и 60 нм и создания школы высококвалифицированных специалистов в области проектирования и программирования чипов, что позволит осуществить наработки собственных баз IP-модулей.
Продолжая обсуждение проблемы точности, определим основные факторы, влияющие на погрешность измерений:
-
– погрешность хода часов НАП, т. е. расхождение между орбитальными (спутниковыми) и наземными (пользовательскими) часами. Данная погрешность по предварительным оценкам дает отклонение от точки определения до 3 м [1]. Для ее устранения необходимо применять высокоточные источники тактирования для часов НАП. А поскольку неточность применяемых кварцевых резонаторов пользовательской аппаратуры имеет значение порядка 10–12 , что дает за одни сутки разброс, сопоставимый со временем прохождения сигнала от спутника до приемника ~70 мс, то необходима периодическая корректировка хода часов, т. е. усложнение функций процессорного ядра;
-
– неточность координат спутников, также дающая ошибку до 3 м [1]. Для ее устранения требуется увеличение разрешающей способности вычислителя координат, т. е. увеличение разрядной сетки вычислителя процессорного ядра и, возможно, введение единовременной поправки;
-
– шумы приемного тракта аппаратуры, дающие самую большую ошибку на аппаратном уровне – до 10 м [1]. Эти шумы устраняются за счет применения малошу-
- мящих усилителей приемного тракта и усреднения сигнала по большому числу выборок при оцифровке, что также приводит к увеличению производительности вычислительного ядра;
-
– возможность искусственного внесения дополнительных помех для гражданского использования, т. е. селективный доступ. Такие помехи могут давать ошибку до 30 м [1], например в системе GPS до недавнего времени, когда данный запрет был снят. Но возврат этой функции также прост, как и отказ от нее. Устранить эти помехи можно путем отказа от селективного доступа и увеличения числа систем, используемых в приемнике. Если одна сторона вводит селективный доступ, то при трех-четырех и более системном процессоре точность определения координат окажется достаточно высокой;
-
– искажение (наложение) отраженных и принимаемых на антенну сигналов, т. е. многолучевость, которая может вносить ошибку в определении координат до 50 м [1]. Это искажение устраняется за счет усреднения помех, вносимых дополнительными отраженными волнами, при увеличении времени замера с небольшим смещением относительно начальной точки;
-
– тропосферные и ионосферные погрешности, дающие искажения до 30 м [1]. Устранение этих погрешностей должно производится путем построения моделей тропосферных и ионосферных помех, на основании которых смоделированный сигнал должен исключатся из приемного.
Не менее эффективной является и методика дифференциального режима измерения координат, в которой используются два приемника сигнала: основной – базовая станция – и вторичный – рабочая станция. Координаты определяются по вектору базовой линии (рис. 2). Если оба приемника находятся в относительно небольшом удалении, то помехи ионосферы и наложение отраженных волн на них будут практически одинаковыми, а следовательно разница между ними будет стремиться к нулю. Таким образом, имеется возможность сокращения уровня помех при определении координат и значительного повышения точности измерений.
Рассмотрев основные проблемы, связанные с определением точности НАП, можно с уверенностью утверждать, что все они имеют достаточно обоснованные пути их решения. Однако для успешного воплощения этих реше-
аппаратуры
Рис. 1. Приемник ГЛОНАСС
ний требуется значительное расширение вычислительных возможностей приемной аппаратуры. И здесь потребуется переход на качественно новый уровень производства ГЛОНАСС-чипов. Эти чипы должны представлять собой мультипроцессорную систему на кристалле, способную на высокой скорости производить параллельные вычисления и обработку сигнала от 4...5 навигационных систем, имеющих в своем составе по 24 спутника, а их энергопотребление не должно превышать 40 мВт на максимальной тактовой частоте. Из всего сказанного выше следует, что технология производства ГЛОНАСС-чипов должна быть основана на не менее чем 40-нанометровой архитектуре, что в свою очередь позволит создавать миниатюрные устройства, способные функционировать не только в приемниках массового пользования, но и в живом организме (в виде имплантов) (рис. 3).
Наряду с разрешением отмеченных выше проблем также требуется добавление новой частоты в сигналах GPS и
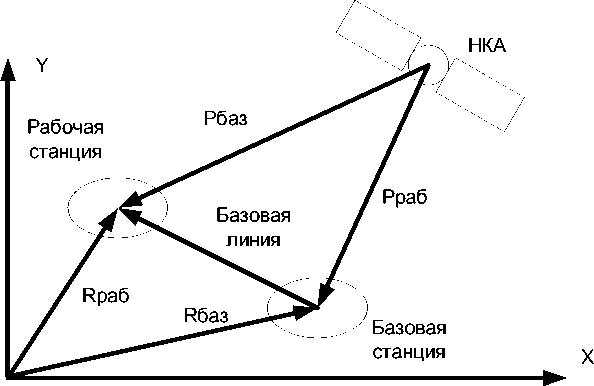
Рис. 2. Дифференциальный режим измерения координат
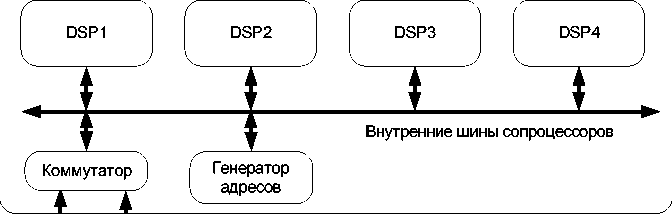
Сопроцессоры цифровой обработки сигнала с фиксированной и плавающей точкой
Блок интервальных таймеров и часы реального времени
Шины данных и адреса внешней памяти
Системный арбитр шин
Контроллер сопряжения с внешней памятью

Центральный процессор
4- портовое ОЗУ процессора

Универсальный асинхронный порт (UART)
кНзаевзиасвимсимая шина данных процессора
кНзаевзаивсимсимая шина данных прямого доступа к памяти DMA
Кэш-память программ
Встроенный отладчик
Порты синхронного параллельного обмена
Контроллер ПДП (DMA)
Порты синхронного последовательного обмена
JTAG-интерфейс
Модуль управления питанием
Рис. 3. Интегрированный навигационный процессор параллельной обработки сигнала введение навигационных сигналов на геостационарных спутниках, запуск и подключение отечественной аппаратуры к европейской спутниковой навигационной системе Galileo, разработка и внедрение наземных устройств и приемников, комбинированных с инерциональными и оптическими навигационными приборами, создание приемников, работающих внутри помещений и т. д.
