Проблемы разработки моделей современной робототехники и трудности формирования инновационного образовательного процесса

Автор: Тятюшкина Ольга Юрьевна
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2020 года.
Бесплатный доступ
Рассматриваются объективно необходимые и возможные социо-технические и социо-экономические условия для разработки научно-методологического, программно-алгоритмического и технического базиса в области разработки интеллектуальной робототехники. Кратко обсуждаются основы методологии разработки и примеры информационных технологий образовательного процесса в интеллектуальной робототехнике.
Робототехника, интеллектуальные системы управления, интеллектуальный тренажер, образовательный процесс
Короткий адрес: https://sciup.org/14122724
IDR: 14122724 | УДК: 004.415.2,
Problems of model development of modern robotics and the difficulties of forming an innovative educational process
The objectively necessary and possible socio-technical and socio-economic conditions for the development of a scientific-methodological, software-algorithmic and technical basis in the development of intelligent robotic technology are considered. The fundamentals of the development methodology and examples of information technologies of the educational process in intelligent robotics are briefly discussed.
Текст научной статьи Проблемы разработки моделей современной робототехники и трудности формирования инновационного образовательного процесса
Tyatyushkina O. Problems of model development of modern robotics and the difficulties of forming an innovative educational process. System Analysis in Science and Education, 2020;(4):71–78(In Russ). Available from: DOI: 10.37005/2071-9612-2020-4-71-78.
Робототехника является одним из передовых и динамично развивающихся синергетических направлений науки и техники, предназначена функционально обеспечить потребности социальной среды (социума), занимающееся разработкой автоматизированных технических и производствен-ных/непроизводственных систем. В свою очередь, ИТ проектирования робототехнических систем является важнейшей технической основой интенсификации производства, научных исследований, образовательных процессов, сфер обслуживания и др. Поэтому образовательные процессы в технических университетах РФ были до настоящего времени ориентированы на долгосрочные этапы внедрения такого рода макророботов в автоматизацию технологических процессов, хотя и отставали в период 1990– 2000 гг. примерно на 60% от мирового стандарта по производству роботов. Но материально-техническая база проблемно-ориентированных технических университетов позволяла проходить практику, создавать технологии исследования и разработки новых видов робототехнических систем.
Учебники и учебные программы университетов РФ и переводы зарубежных изданий могли дать выпускнику платформу профессиональной подготовки на период 4–5 лет на этапе развития робототехники в период 1990–2000 гг., так как сама робототехника на этом периоде развития базировалась на законах аналитической механики и исполнительные устройства мехатроники имели промышленную апробацию. Поэтому схема образовательного процесса по принципу «от простого к сложному» позволяла подготавливать специалистов в области робототехники, опираясь на технологически оснащенную и развитую базу проблемно-ориентированных НИИ, и могла удовлетворять потребности промышленного производства. На современном этапе развития робототехники данный принцип имеет ограниченное применение.
Функциональные особенности и тенденции развития робототехники
Показатели производства, продажи и внедрения робототехнических комплексов свидетельствуют о состоянии и развитии национальной экономики, разработки инновационных технологий повышения производительности промышленных предприятий и удовлетворения потребностей социума.
Именно поэтому в развитых странах робототехника была воздвигнута в рамки национальных проектов и дан приоритет финансированию перспективных исследований. К сожалению, в РФ состояние дел даже в развитии макро-робототехники оставляет желать лучшего и далеко отстает от мирового уровня как в разработке, так и в инновациях образовательного процесса. На рисунке 1 представлена диаграмма распределения объемов продаж роботов [1].
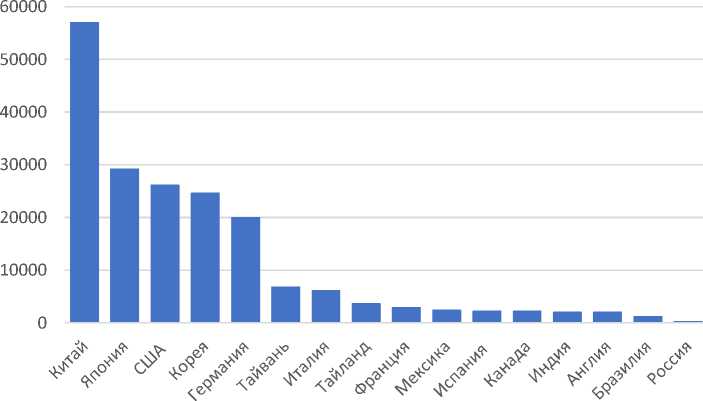
Рис. 1. Распределение объемов продаж роботов по странам мира
Из диаграммы следует, что в РФ продано на октябрь 2018 г. всего 340 – 350 роботов, тогда как в Китае – 57 096, Японии – 29 300, США – 26 200 и в Южной Корее – 24 700.
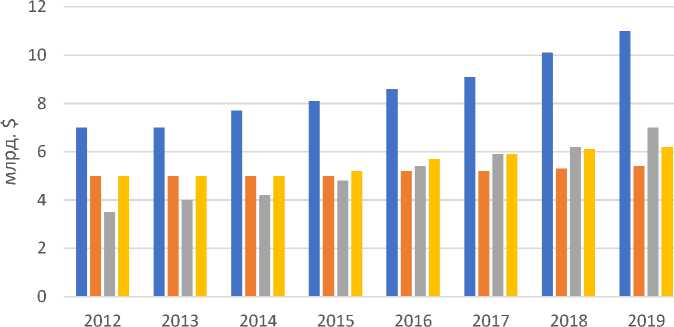
На рисунке 2 приведены объемы прибыли от внедрения роботов на рынках Азии, Северной Америки и т.д.
год
■ Азия ■ Северная Америка ■ Евросоюз ■ Другие рынки
Рис. 2. Объемы прибыли, получаемой от внедрения роботов на рынках различных регионов
Хронологически мировой рынок робототехники подразделяется на сектор промышленной и сектор сервисной робототехники. При этом роботы сервисного обслуживания подразделяют по применению на профессиональные и персональные. Существует также более тонкая классификация роботов на классы с проблемной ориентацией, социальной направленности, особого применения в условиях нештатных ситуаций и техногенных катастроф, применения в военно-промышленном комплексе, применения в научных исследованиях и др.
На данный момент отчетлива видна тенденция перехода от промышленных роботов к роботам сервисного обслуживания с различной степенью социальной ответственности: от бытового обслуживания к медицинским роботам и роботам для обслуживания людей с физическими недостатками, роботов для ухода за детьми, ликвидации последствий техногенных катастроф и т.п. При этом ИТ проектирования промышленных роботов и ИТ проектирования роботов сервисного обслуживания опираются на единую платформу применения технологий интеллектуальных вычислений и интеллектуального когнитивного управления. Такой подход позволяет создавать гибридные промышленные роботы сервисного обслуживания специального назначения.
В свою очередь, в силу специфики и сложности объекта управления проектирование и разработка роботов сервисного обслуживания, например, для людей пожилого возраста, породили много новых задач как в сфере мехатроники (новые виды безопасных и комфортных захватывающих устройств, сенсоры, видеокамеры, пневматические, гидравлические и другие исполнительные сервомеханизмы, и др.), так и в разработке новых видов систем управления (управление по обработке изображений, навигация робота, управление роботом-манипулятором и автономным роботом с применением нейроинтерфейсов и др.).
К настоящему времени робототехника накопила большое количество разнообразных примеров макророботов, реализующих различные нелинейные виды и формы динамического движения и типы технологических операций. Характерным для этих роботов является реализация на традиционных системах управления, они имеют ограниченные возможности на выполнение поставленной цели управления. При появлении непредвиденных ситуаций управления, внутренних отказов системы измерения, задержки сигнала управления, появления недоопределенных параметров или шумов в канале связи и передачи информации данный класс роботов с применением традиционных типов систем управления не достигает поставленной цели управления. В этом случае необходимо разрабатывать интеллектуальные роботы на основе ИИ, в частности на основе нечетких систем управления и технологии ИВ. Решение проблемы внедрения в робототехнику технологий теории ИИ отмечается как одна из важнейших задач, которая требует комплексного подхода. В результате осуществляется переход к разработке ИТ проектирования интеллектуальной робототехники на основе новых видов технологии ИВ.
Возникает вопрос: формирует ли существующая образовательная система в школе, колледже и университете современное представление о робототехнике хотя бы на уровне разработки макророботов? Для объективного ответа на поставленный вопрос предварительно обсудим существующие модели образовательного процесса в робототехнике.
Компьютерное обучение робототехнике: состояние базиса, концепции и ошибки
Несмотря на огромные усилия сложившаяся ситуация в России [2-4] демонстрирует серьезное отставание данного направления от мирового уровня. Уровень роботизации в РФ примерно в 70 раз ниже среднего мирового уровня, что показывает как отсутствие технологий, так и катастрофически недостаточное число специалистов, способных компенсировать это отставание.
С одной стороны, появляются новые нормативы и образовательные программы для специальностей и профессий, ориентированные на робототехнику и подготовку новых высококвалифицированных кадров. С другой стороны, современное реальное состояние и результаты анализа образовательных программ кружков, факультативов, семинаров средних классов свидетельствуют, что в лучшем случае образовательный процесс, связанный с робототехникой, в основном включается в программу средних классов, не охватывает преемственность студенческого и промышленного опыта. Более того, использование разнородного образовательного оборудования и короткий период обучения (5-8 классы) свидетельствуют о частичной ограниченности и несвязности образовательных программ со смежными дисциплинами, такими как информатика, математика, физика и т.д., что в конечном счете влияет на качество оказания образовательных услуг. Причем с учениками старше 15 лет работают только 6% всех образовательных организаций такого класса. При этом качество методологии обучения существенно зависит от профессиональной подготовки преподавателя, что изначально ставит многие методики под сомнение, поскольку часто критерием качества результата обучения служит эмоциональная оценка интереса обучаемого и умение собрать примитивный, с точки зрения преподавателя, робот.
Отсутствие обязательной сертификации и проработки образовательных программ профессионалами из данного направления позволяет в процессе обучения использовать любое оборудование и учебно-методические материалы. Например, это широкодоступные и приемлемые для такой работы [5, 6] конструкторы Lego или, в лучшем случае, Arduino .
Следует отметить, что коммерчески широко рекламируемый конструкторский робототехнический набор для учащихся средних школ и колледжей типа Lego был разработан в Дании в 1998 г. для реализации идеи «коллективного мозгового штурма» и к настоящему времени идеологически существенно устарел. Сама идеология и методология обучения построены на стремлении быстрого проявления интереса неподготовленного школьника к робототехнике за счет активного участия в сборке готового робота и простейшего программирования заданного элементарного движения без объяснения сущности создания самого робота и, особенно, сущности и роли алгоритма управления роботом. По существу, преследовалась цель коммерциализации разработанных продуктов за счет распространения в широкой аудитории дошкольного и школьного образования. Основной проблемой применения Lego -конструктора является отсутствие в данном подходе элементов моделирования поведения робота, введения алгоритма управления и его программной поддержки, стартуя с процесса сборки робота по заданной инструкции, и существенно зависит от квалификации преподавателя.
К настоящему времени существует большое количество разработок контроллеров, позволяющих поддерживать образовательные процессы, максимально приближенных к потребностям промышленности. Однако не существует конструктивного перехода от разработок образовательного уровня к проектированию и конструированию реальных роботов.
Традиционно робототехника — междисциплинарное направление на стыке многих научных и технических дисциплин. Развитие смежных направлений в физике, математике, биокибернетике, теории систем управления, нейрофизиологии, теории искусственного интеллекта, информатике и др. существенно повлияло на изменение принципов и формирование научного базиса проектирования и разработки структур современных робототехнических комплексов с учетом взаимодействия с человеком. Поэтому появились новые технологии проектирования робототехники, которые коренным образом изменили соответствующие принципы разработки и проектирования.
Одновременно такая ситуация объективно приводит к постоянному существенному отставанию образовательного процесса от новых результатов при подготовке, востребованных рынком интеллектуального труда квалифицированных кадров, в частности в РФ. Образовательные программы включают современные результаты научных исследований после их апробации примерно через 7 - 8 лет (из-за отсутствия необходимого научно-технического базиса и необходимых учебных пособий). Ситуация усложняется также тем обстоятельством, что достоверность прогноза удовлетворения потребности и коммерческой привлекательности робототехнических комплексов в социуме связана непосредственно с правильной оценкой рисков внедрения новых технологий и экономической возможностью освоения и реализации новых технологий типа нанотехнологий, квантовой информатики, квантового компьютера и др.
Модель образовательного процесса для различных классов роботов (на макро-, микро- и нанороботы) носит принципиально отличный характер и требует привлечения новых знаний, ранее не используемых и не развиваемых в макроробототехнике, например, изучения технологий интеллектуальных вычислений, нейроинтерфейсов типа «мозг - исполнительное устройство», когнитивного интеллектуального управления и др. Внимание же образовательных процессов даже в ведущих технических университетах сосредоточено на изучении «примитивных» или упрощенных моделей макророботов типа роботов-манипуляторов и простейших автономных роботов.
В качестве основных причин, сдерживающих развитие робототехники в РФ, можно выделить отсутствие квалифицированных специалистов в области робототехники и слабость образовательной инфраструктуры (устаревшие образовательные программы, слабая учебная инфраструктура, отсутствие квалифицированных преподавателей и т.п.).
Среди других важных причин были названы: отсутствие собственных технологических решений; непонимание ситуации на международном и российском рынке робототехники и непонимание спроса на робототехническую продукцию; недостаточность финансирования; затрудненность экспорта/им-порта технологических продуктов и их комплектующих; отсутствие понятных и прозрачных механизмов финансирования исследований; бюрократические препоны; неумение разработчиков анализировать рынок интеллектуальных продуктов, создавать и защищать интеллектуальную собственность и др. Опыт показал, что смена научно-технической платформы трудно воспринимается специалистами в области теории ИИ, управления и проектирования робототехники, которые много лет назад прошли образовательный процесс на базе устаревших ИТ, и представляет собой постоянную социально-техническую и социально-экономическую проблему.
В результате интенсивное развитие указанных направлений и перечисленные причины существенно увеличили разрыв между современными ИТ и образовательными процессами в РФ, что привело к моральному устареванию компетенций, получаемых навыков и знаний, существенному пробелу в квалифицированных специалистах, невостребованности на современном рынке интеллектуального труда результатов российских специалистов и отсутствию конкурентоспособности разрабатываемых в РФ наукоемких ИТ [1]. Сложность решения указанной проблемы зависит также от уровня экономического развития социотехнической системы, для которой разрабатываются робототехнические комплексы, потребности в производстве и подготовленной образовательной системы, которая удовлетворяет по качеству и количеству выпускаемых специалистов.
В РФ уже активно ведется подготовка требований к образовательным программам и дисциплинам направления «Робототехника». Однако проблема робототехники состоит на данном этапе не в создании новых типов роботов, а в создании программно-алгоритмического обеспечения, которое позволит выполнять разнообразные технологические операции. Попытка осуществлять технологические операции за счет разнообразия моделей робототехнических систем имеет существенные физические ограничения на аппаратную реализацию и функциональные возможности в условиях непредвиденных ситуаций управления.
Создание робототехники через образовательные процессы
Для создания образовательных лабораторных роботов и программ, которые могут взаимодействовать с исследовательскими центрами компаний, передовые университеты часто сознательно стараются не использовать унифицированные конструкторы и комплектующие, что расширяет кругозор обучаемого и позволяет формировать новые принципы и представления о проектировании новых типов роботов [7]. Для этих целей приобретается самое современное оборудование - видеокамеры, лазерные радары, манипуляторы, двигатели и платы, развивается алгоритмическое и программное обеспечение и др. Именно огромное изобилие самых современных сенсоров, вычислительных средств и исполнительных устройств и механизмов позволяет создавать все новые и более совершенные алгоритмы обучения, адаптации и самоорганизации ИСУ. Каждая из таких технологий, закладываемая в конечное изделие, является объектом интеллектуальной собственности и подлежит тщательной защите.
Именно такой подход заложен в структуру интеллектуального робототехнического тренажера [8, 9], применяемого в образовательном процессе подготовки бакалавров и магистров в Институте системного анализа и управления университета «Дубна. В данном образовательном процессе обучающийся формирует свои активные знания за счет участия в создании новых видов мехатроники, алгоритмического обеспечения и программного продукта для интеллектуального когнитивного управления конкретного робота. В этом случае осуществляется извлечение новых знаний и обучающийся может непосредственно оценить приобретенные знания, сравнивая с предыдущими этапами, например, исследования и формирования БЗ самоорганизующегося нечеткого регулятора и т.п. Поэтому синергетический эффект самоорганизации знаний может быть проверен непосредственно математическим и физическим (натурным) моделированием на разработанном роботренажере.
На рисунке 3 приведена концептуальная модель интеллектуального роботренажера в образовательном процессе интеллектуальной робототехники.

Рис. 3. Концептуальная модель ИТ образовательного процесса в интеллектуальной робототехнике
Смысловое содержание и функциональная структура интеллектуального тренажера имеют принципиальное отличие от ранее разрабатываемых подходов к структурному проектированию моделей интеллектуального управления и представляют новое направление в области исследования инновационных ИТ типа квантовых ИТ проектирования нанороботов, разработки, проектирования и применения робастных самоорганизующихся ИСУ и др.
Выделим некоторые особенности разработанного подхода к структурному проектированию моделей интеллектуального управления и его отличия от известных работ по разработке ИСУ. Важным для системной инженерии результатом применения ИТ проектирования ИСУ является показанная возможность реализации квантовых алгоритмов и квантовых вычислений на типовом (а не на квантовом) процессоре в стандартной конфигурации аппаратной поддержки роботов-манипуляторов и автономных роботов. В этом случае применение квантового алгоритма самоорганизации баз знаний позволяет в реальном времени достичь цели управления в непредвиденных ситуациях за счет повышения робастности ИСУ в проблемно-ориентированной области. Вычислительным базисом отмеченных направлений разработок является технология квантовых мягких вычислений. Поэтому из многочисленных моделей ИВ в качестве примера интеллектуальной платформы программно-алгоритмического обеспечения роботренажера представлены прикладные разработки технологий мягких, дробных и квантовых вычислений.
Из многочисленных моделей ИВ для разработки платформы интеллектуального роботренажера не случайно выбраны технологии мягких, дробных и квантовых вычислений, а также квантового программирования. Данные инновационные технологии вычислений составляют основу проектирования робастных самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (нештатных) ситуаций и информационного риска.
Отмеченная актуальность и широта аудитории пользователей (см. рис. 4) технологиями ИВ объясняются также следующим обстоятельством: одной из предметных областей применения технологий ИВ является разработка прорывных интеллектуальных наукоемких ИТ на основе новых информационных платформ и физических принципов.
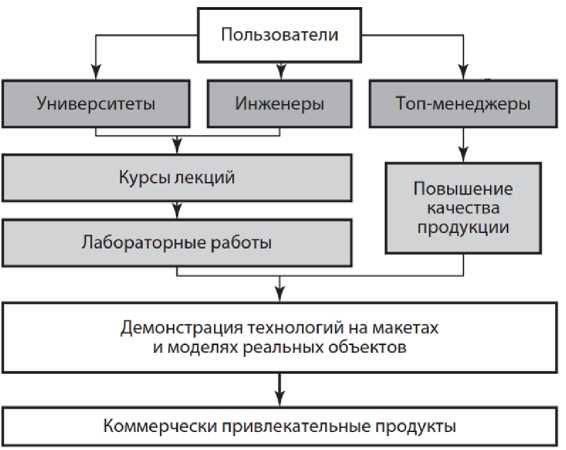
Рис. 4. Структура пользователей интеллектуального роботренажера
Разработанный интеллектуальный инструментарий (см. рис. 3) позволяет: построить активный образовательный процесс для учащихся средней школы и профессиональных колледжей по принципу «от простого к сложному»; организовать творческий процесс конструирования мехатроники; сформировать профессиональные представления и компетенции в области программирования робототехники; для студентов университетов соответствующих специальностей сформировать курс лекций, семинаров и лабораторных работ на интеллектуальном роботренажере, позволяющих в процессе моделирования, проектирования, конструирования на 3D-принтере создавать реальные изделия мехатроники и осуществлять «интеллектуализацию» полученного изделия для достижения цели выполнения требуемой технологической операции декомпозиция сложной задачи на простые модули); осуществлять проектирование новых видов робототехники и повышать квалификацию сотрудников промышленных компаний. Такой подход к формированию образовательного процесса с индивидуальной траекторией обучения позволяет на каждом этапе обучения извлекать и формировать активные знания, непосредственно протестировать полученные навыки проектирования интеллектуальной робототехники как коммерчески привлекательный продукт. Выполнение бакалаврских, магистерских и кандидатских диссертаций на интеллектуальном роботренажере позволяет формировать новые виды лабораторных работ и формировать портфель заказов на коммерчески привлекательные продукты интеллектуальной робототехники.
Заключение
Проведенный анализ показал, что модели мехатроники для создания макророботов не обладают системами управления с необходимым уровнем интеллектуальности. Работоспособность и эффективность такого рода моделей резко снижаются в условиях непредвиденных ситуаций управления или неопределенности исходной информации о среде функционирования. Требуется разработка и внедрение интеллектуальных систем управления. Предложенный подход позволяет создавать широкий спектр интеллектуальных роботов на основе уже существующей платформы мехатроники и организовывать образовательный процесс параллельно с разработкой интеллектуальных роботов на интеллектуальном роботренажере, а также дает возможность применять новые принципы интеллектуального когнитивного управления без разрушения ИТ проектирования аппаратной части мехатроники. При отсутствии материально-технической базы разработки современной мехатроники в университетах РФ получаем возможность формировать образовательные процессы по разработке интеллектуальных роботов за счет программно-алгоритмической поддержки существующей мехатроники.
Список литературы Проблемы разработки моделей современной робототехники и трудности формирования инновационного образовательного процесса
- Аналитическое исследование: Мировой рынок робототехники / НАУРР: Национальная ассоциация участников рынка робототехники. - 2016. - 68 с. - URL: http://robotforum.ru/assets/files/000_News/NAURR-Analiticheskoe-issledovanie-mirovogo-rinka-robototehniki-%28yanvar-2016%29.pdf.
- Программа "Робототехника" как базовый образовательный модуль центров технического творчества для детей и молодежи на базе социально ориентированных НКО. / Автономная некоммерческая организация "Научно-методический центр "Школа нового поколения". - 2013. - 36 с.
- Байкова, Е. С. Развитие исследований в сфере робототехники в организациях ФАНО России / Е. С. Байкова, О. О. Мугин, Д. И. Цыганов // Известия Южного федерального университета. Технические науки. - 2016. - № 1 (174).
- Комков, Н. И. Перспективы и условия развития робототехники в России / Н. И. Комков, Н. Н. Бондарева // МИР (Модернизация. Инновации. Развитие). - 2016. - Т. 7. - № 2 (26).
- EDN: WEBCJB
- Afari, E Robotics as an educational tool: Impact of Lego mind-storms / E. Afari, M. S. Khine // Intern. J. of Information and Education Technology. - 2017. - Vol. 7. - № 6. - Pp. 437-442.
- Chaudhary, V. An experience report on teaching programming and computational thinking to elementary level children using Lego robotics education kit / V. Chaudhary, V. Agarwal, P. Sureka, A. Sureka // 2016 IEEE Eighth International Conference on Technology for Education (T4E). - IEEE, 2016. - Pp. 38-41.
- DEC robotics in education program. [Online]. Available: https://www.adec.ac.ae/en/students/athleticeducation/pages/world-robot-olympiad.asp.
- Ульянов, С. В. Интеллектуальная робототехника Ч I: Креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества "колледж - университет - компания - рынок" // Системный анализ в науке и образовании: сетевое научное издание. - Дубна, 2016. - № 4. - URL: http://sanse.ru/download/274. (дата обращения: 17.12.2017).
- Левин, М. Н. Технологии мягких вычислений. Ч. 2: Программная системная инженерия в интеллектуальной робототехнике: научно-методическое пособие / М. Н. Левин, О. Ю. Тятюшкина, С. В. Ульянов. - М.: КУРС, 2020. - 336 с.
