Процедура формирования программы номинального управления гелиоцентрическим движением космического аппарата с солнечным парусом с использованием законов локально-оптимального управления

Автор: Р.М. Хабибуллин
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 1, 2020 года.
Бесплатный доступ
Работа посвящена некомпланарному межпланетному перелету Земля-Венера космического аппарата, оснащенного солнечным парусом. Целью гелиоцентрического движения является попадание космического аппарата с неидеально отражающим солнечным парусом в сферу Хилла Венеры с нулевым гиперболическим избытком скорости. В работе используется неидеально отражающая модель солнечного паруса, величина и направление ускорения от которого рассчитывается с учетом зеркального и диффузного отражений, поглощения и пропускания фотонов поверхностью солнечного паруса. Одной из главных задач в области навигации и управления движением космического аппарата является поиск простой энергоэффективной схемы управления для выполнения того или иного маневра. Именно такими схемами управления и являются законы локально-оптимального управления, различные комбинации которых позволяют выполнить необходимые маневры при межпланетном перелете. Описана процедура формирования программы управления для некомпланарного межпланетного перелета типа Земля-Венера космического аппарата с неидеально отражающим солнечным парусом. В качестве результатов получены траектория перелета, изменение фазовых координат во времени, графики изменения управляющих углов и сформированная программа номинального управления. Полученные результаты удовлетворяют всем граничным условиям, описанным в постановке задачи.
Неидеально отражающий солнечный парус, закон локально-оптимального управления, программа номинального управления, некомпланарный межпланетный перелет
Короткий адрес: https://sciup.org/14115934
IDR: 14115934 | УДК: 629.78 | DOI: 10.26732/j.st.2020.1.01
Procedure for forming nominal control program of solar sail spacecraft heliocentric movement using locally optimal control laws
The paper is devoted to the non-coplanar interplanetary flight Earth-Venus of the spacecraft equipped with a solar sail. The goal of the heliocentric movement is to transfer a spacecraft with a non-perfectly reflecting solar sail into the Hill’s sphere of the Venus with zero hyperbolic excess speed. The magnitude and direction of acceleration is calculated taking into account specular and diffuse reflections, absorption and transmission of photons by the surface of the solar sail. One of the main tasks in the field of navigation and motion control of a spacecraft is the search for a simple energy-efficient control scheme for performing maneuvers during flight. These control schemes are locally optimal control laws, various combinations of which allow you to perform the necessary maneuvers during an interplanetary flight. The procedure for the formation of a control program for a non-coplanar interplanetary flight of the Earth-Venus type of a spacecraft with a non-perfectly reflecting solar sail is described. The results include the flight trajectory, the change in phase coordinates in time, graphs of changes in control angles, and the nominal control program. The obtained results satisfy all the boundary conditions described in the statement of the problem.
Текст научной статьи Процедура формирования программы номинального управления гелиоцентрическим движением космического аппарата с солнечным парусом с использованием законов локально-оптимального управления
Солнечный парус (СП) – это приспособление, использующее давление солнечного света на отражающую поверхность для приведения в движение космического аппарата (КА) [1]. Значительное преимущество использования СП состоит в том, что он способен заменить двигательную установку на борту малого КА. Отсутствие рабочего тела позволяет существенно уменьшить массу всего КА и продлить срок его активного существования. За прошлые десять лет большой опыт использования СП был получен космическими агентствами США, Европы и Японии [2–7].
Одной из главных задач в области навигации и управления движением КА является по-
иск простой энергоэффективной схемы управления для выполнения того или иного маневра. Подобные способы управления не обязательно должны быть близки к оптимальным. Основным требованием, выдвигаемым к подобным способам управления, является простота анализа и реализации. Именно такими схемами управления и являются законы локально-оптимального управления (ЗЛОУ), различные комбинации которых позволяют выполнить необходимые маневры при межпланетном перелете [8]. ЗЛОУ предназначены для наискорейшего изменения и сохранения одного из оскулирующих элементов орбиты, таких как: большая полуось A , фокальный параметр p , эксцентриситет e , радиус афелия r α, радиус перигелия r π, аргумент перигелия w , истинная аномалия ϑ, наклонение i , долгота восходящего узла Ω.
Целью работы является разработка процедуры формирования программы номинального

KI/IE АППАРАТЫ Ш
Том 4
управления КА с неидеально отражающим СП на базе ЗЛОУ для совершения некомпланарного межпланетного перелета на примере перелета Земля-Венера.
-
1. Постановка задачи
Рассматривается межпланетный некомпланарный перелет КА с неидеально отражающим СП с гелиоцентрической орбиты Земли к Венере. КА выведен из сферы действия Земли с помощью разгонного блока. Цель перелета – попадание в сферу Хилла планеты – области пространства, в которой могут двигаться тела, оставаясь спутником планеты, при этом интеграл энергии КА h < 0.
Введем вектор фазовых координат X , описывающий движение центра масс (ЦМ) и движение вокруг ЦМ в комбинированной системе координат:
X=(r, u, Vr, Vu, q i, e p, e n, e,, ® p, ® n, ®,) T, где r – гелиоцентрическое расстояние КА с СП; u – аргумент широты; Vr, Vu – радиальная и трансверсальная скорости; Ω – долгота восходящего узла орбиты; i – наклонение орбиты; θp, θn, θs – углы поворота СП, описывающие ориентацию КА с СП; ωp, ωn, ωs – угловые скорости.
Для описания управления ориентацией СП вводится вектор номинального управления U :
U = {5 p (t), 5, (t )}T, где δp(t), δs(t) – функции номинального управления, определяющие вращение СП относительно ЦМ, которые могут принимать следующие значения:
8 p ( t ) = { + 1,0, - 1) 1
•
-
8 , ( t ) = { + 1,0, - 1}
Фиксированный вектор проектных параметров prm КА с СП описывается следующим образом:
prm ={m, 5, p, pr, pd, a, t, hтэy f, где m – масса КА с СП; S – площадь СП; ρ – коэффициент отражения поверхности СП; ρr – коэффициент зеркального отражения поверхности СП; ρd – коэффициент диффузного отражения поверхности СП; α – коэффициент поглощения фотонов поверхностью СП; τ – коэффициент пропускания; hТЭУ – ширина тонкопленочных элементов управления.
Параметры вектора фазовых координат X и вектора управления U должны удовлетворять следующим ограничениям:
18 p ( t )| + |5 , ( t )| < 1
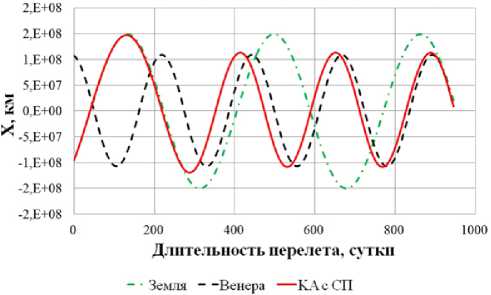
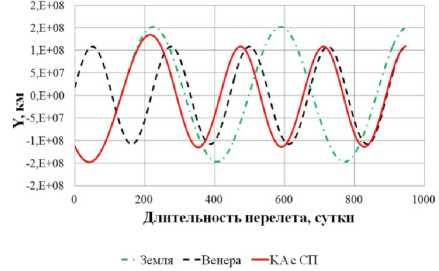
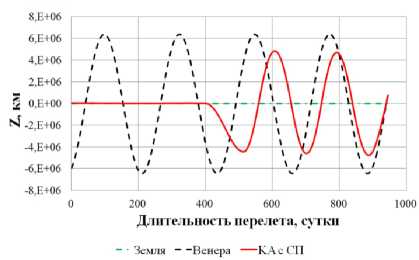
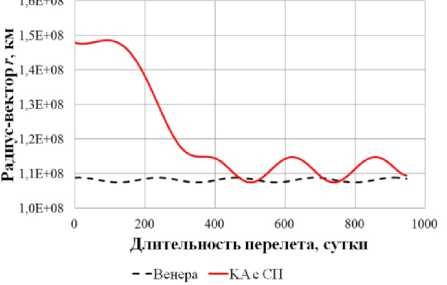
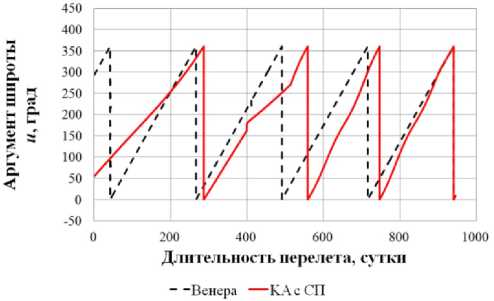
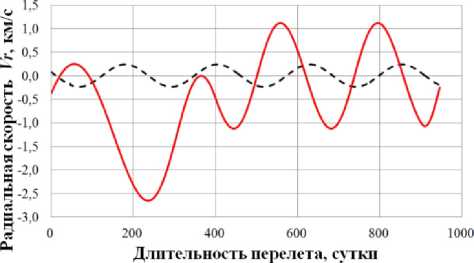
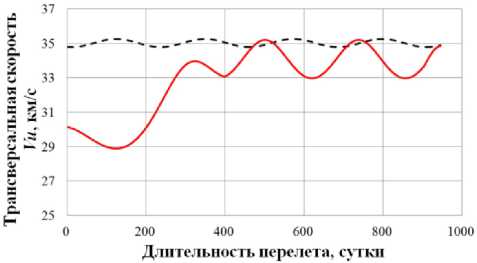
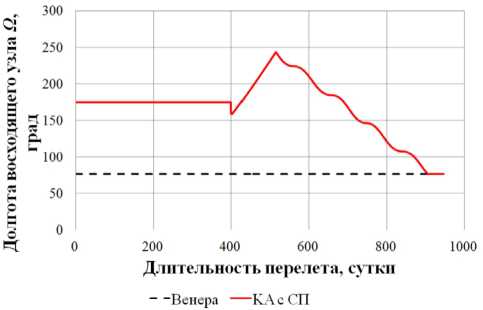
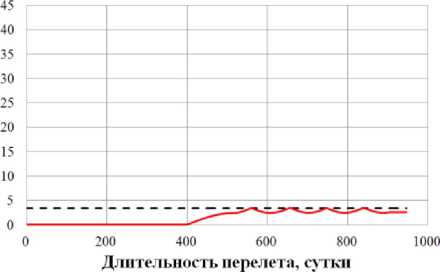
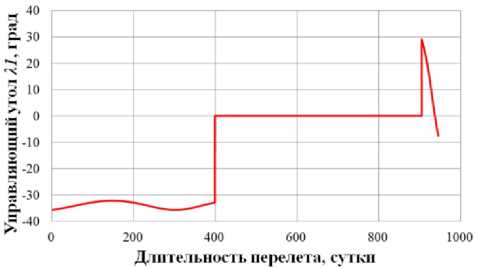
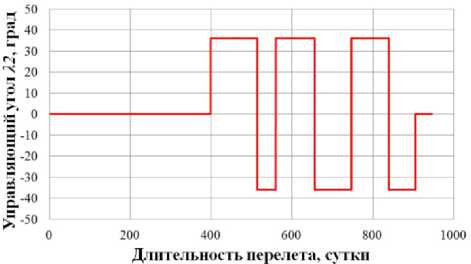
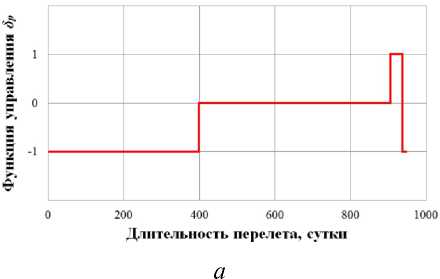
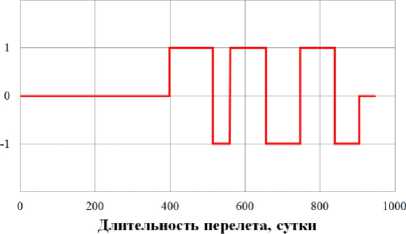
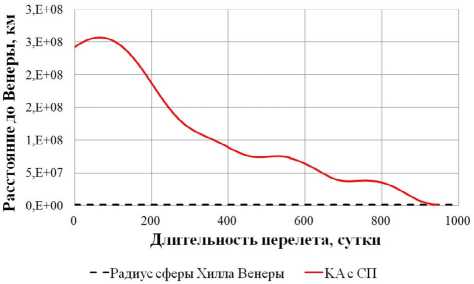
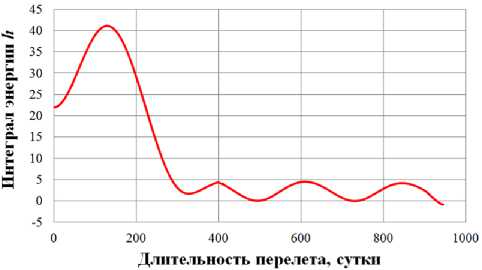
0)л <|to| Граничные условия гелиоцентрического перелета записываются следующим образом: X(10) = X 0, X(tk) = Xk. В качестве основного критерия оптимальности выбрано минимальное время перелета tk → min при условии: Dist(Г, u, Q, i) < Rxuo„a 1 h (Dist, Vr, V) < 0 где Dist – текущее расстояние между КА с СП и целью; RХилла – радиус сферы Хилла планеты. Интеграл энергии h определяется следующим образом [9]: h=∆V2- 2µцель . Dist Здесь ∆V – разность полных скоростей КА и планеты, к которой совершается перелет; μцель – гравитационный параметр планеты. Вектор функции управления U, удовлетворяющий ограничениям (1) и граничным условиям (2) и доставляющий минимум критерию оптимальности при фиксированном векторе проектных параметров prm, описывается следующим образом: Uopt(t) = arg min tk (U| Prm G P,X(t0) = Xo,X(tk) = Xk) - Задача сложная, поэтому предлагается процедура решения, состоящая из трех частей: 1. Получение номинальной программы управления движением ЦМ КА. 2. Определение максимальных необходимых угловых скоростей для обеспечения полученной программы номинального управления, расчет параметров органов управления. 3. Моделирование совместного движения ЦМ и вокруг ЦМ для демонстрации реализуемости полученной программы управления. 4. Данная статья посвящена первому пункту задачи – получение номинальной программы управления движением ЦМ КА. 2. Законы локально-оптимального управления В работе [8] автором получены ЗЛОУ для КА с двигателем малой тяги. В работе [7] автор сформировал ЗЛОУ для КА с СП. В рамках данной работы ЗЛОУ предназначены для определения управляющих углов λ1 и λ2. Угол λ1 – это угол между направлением падения фотонов на поверхность СП (совпадает с направлением радиус-вектора r) и проекцией нормали СП на плоскость орбиты движения КА. Угол λ2 – это угол между нормалью СП и ее проекцией на плоскость орбиты движения КА. Более подробно математическая модель движения КА с неидеально отражающим СП описана в [10]. Управляющие углы λ1 и λ2, обеспечивающие наискорейшее изменение оскулирующего элемента K, могут быть вычислены из следующего отношения: dK 2 1,2 opt = argmax ^1,2. . Г п n! dt -кI При λ1 = ±π/2 выполняется закон сохранности оскулирующего элемента во времени. Для обеспечения максимальной скорости изменения одного из элементов гелиоцентрической орбиты закон управления должен быть записан в следующем виде [11]: 1 f2 (з) (к (з) - V9IfN?+8if(3)f) X K = — arcsin------—;--------------—------- 2 3([fl (»)]! +[ f2(S)]2) , где f1 и f2 – компоненты, определяющие максимальную скорость изменения соответствующих орбитальных элементов. Для монотонного изменения наклонения орбиты i необходимо изменять направление тяги на противоположное в точках, где аргумент широты u = ±π/2. Для монотонного изменения долготы восходящего узла Ω необходимо осуществлять изменение управления в точках на линии узлов, в которых аргумент широты u = 0 и u = π. При λ2 = ±π/2 выполняется закон сохранности оскулирующего элемента во времени. Для обеспечения максимальной скорости изменения одного из оскулиру-ющего элемента, отвечающего за изменение положения орбиты в пространстве, закон управления должен быть записан в следующем виде: XK = ^ arcsin ^p- Sign [ f (u, X2], где Sign[f(u,λ2)] – функция определения знака в зависимости от значения аргумента широты u и управляющего угла λ2. В качестве примера рассмотрим ЗЛОУ для наискорейшего увеличения одного из элементов: - наискорейшее увеличение большой полуоси A: X. = -arcsin (-1 + ecos9) (ecos9- ^9[ecos9]2 + 8[-1 + ecos9]2) 3([ e cos 9]2 +[-1 + e cos 9]2) наискорейшее увеличение фокального параметра p: p 1 22 Xp =- arcsin 12 3; - наискорейшее увеличение эксцентриситета e: (ecos29 + 2cos9 + e) sin 9 — 9[sin 9]2+ 8 X. = — arcsin ecos 9 + 2cos9 + e 1 + ecos9 \ 3(1 + ecos9) [sin 9]2 I + e cos29 + 2 cos 9 + e 1 + ecos9 2; - наискорейшее увеличение радиуса афелия rα: X1a (2(1 + cos 9) - e sin29) sin9 - 9[sin 9]2+ 8 — arcsin 2(1 + cos 9)- esin2912 1+ecos9 к 3(1 + ecos 9) [sin 9]2+ к 2(1 + cos9)-esin29 1 + ecos9 7.; (оСМИЧЕскиЕ АППАРАТЫ И Том 4 - наискорейшее увеличение радиуса перигелия rπ: (2(1 - cos9) + esin2d) - sin 9- 9[sin 9]2+ 8 X? = - arcsin 2(1 - cos9) + esin2912 1 + ecos9 л \ 3(1 + ecos9) [sin 9]2+ I 2(1 - cos9) + esin29 1 + ecos9 ; - наискорейшее увеличение аргумента перигелия w: sin 9(2 + e cos 9) - cos9-д 9[cos9]2+ 8 , sin 9(2 + ecos9) 2 w Xi - arcsin 1 + ecos9 \ 3(1 + ecos 9) [cos 9]2+ I sin 9(2 + e cos 9) 2 1 + ecos9 ; - наискорейшее увеличение наклонения i: 1 22 [cosusinX2]; X2 = — arcsin —^— Sign - наискорейшее увеличение долготы восходящего узла Ω: 1 22 X, = arcsin 22 Sign [sin u sin X2 ]. 3. Формирование программы номинального управления Для определения параметров орбиты и положения Венеры используется база данных Лаборатории реактивного движения НАСА (Jet Propulsion Laboratory NASA) [12]. Дата старта Xra(to) = (1,479'108км; 54,953 град; -0,371 км/с; 30,122 км/с; 174,806 град; 0,004 град) миссии – 16 ноября 2027 года, дата завершения миссии – 19 июня 2030 года. Начальное положение КА с СП на дату старта и конечное положение Венеры опишем размерными фазовыми координатами в виде X = (r; u; Vr; VM; Q; i) T : T ХВен(ta^Ч) = (1,086-108км; 8,886 град; -0,199 км/с; 34,894 км/с; 76,595 град; 3,394 град)T. Данные о перелете представлены в табл. 1. описаны в табл. 2. Одна итерация моделирования Алгоритм и длительность использования ЗЛОУ соответствует 1 часу движения. Таблица 1 Данные о перелете КА с неидеально отражающим СП с орбиты Земли к Венере № п/п Наименование Значение 1 Цель Венера 2 Радиус сферы Хилла RХилла, км 1 008 000 3 Дата старта D0 16.11.2027 4 Дата завершения перелета Dк 19.06.2030 5 Масса КА с СП m, кг 39,8 6 Площадь СП S, м2 500 7 Длительность перелета, сут. 946 8 Расстояние до цели Dist, км 849 396 Таблица 2 Алгоритм использования ЗЛОУ № п/п Закон управления Дата начала этапа Дата завершения этапа Начальное значение Конечное значение Длительность, сут. 1 Уменьшение A 16.11.2027 18.12.2028 1,000 а.е. 0,724 а.е. 399 2 Увеличение i 18.12.2028 28.05.2029 0,004 град 3,385 град 161 3 Уменьшение Ω 28.05.2029 09.05.2030 224,017 град 76,651 град 345 4 Уменьшение e 09.05.2030 18.06.2030 0,052 0,007 41 Траектория гелиоцентрического движения КА с СП в плоскости XOY и изменение координат во времени представлены на рис. 1–2. Рис. 1. Гелиоцентрическая траектория перелета КА к Венере (▲ — КА; • — Венера; ☼ — Солнце; – · – орбита Земли; – – орбита Венеры; –– траектория КА) На рис. 3 представлены графики изменения фазовых координат во времени. Программа управления включает в себя изменение управляющих углов и функции управления. Использование ЗЛОУ подразумевает изменение положения КА и ориентации СП в пространстве. На рис. 4 приведен график зависимости управляющих углов λ1 и λ2 во времени. Графики функций управления δp и δs представлены на рис. 5. На рис. 6 представлено изменение расстояния между КА и Венерой на протяжении всего перелета. Как видно из рис. 6 на дату завершения миссии расстояние между КА и Венерой стало меньше радиуса Хилла Венеры. На рис. 7 представлен график изменения интеграла энергии, значение которого на дату завершения перелета меньше нуля. Для реализации гелиоцентрического перелета КА с неидеально отражающим СП с орбиты Земли к Венере на расстояние 849 396 км потребовалось 946 суток. Определена безразмерная величина интеграла энергии h = -8,7∙10-4. Найденные расстояние между КА с СП и Венерой Dist и ин- теграл энергии h удовлетворяют условию (3), следовательно, по окончании гелиоцентрического 9 участка КА остается в окрестности Венеры. а б Рис. 2. Зависимость координат положения КА во времени: а - координата X; б - координата Y; в - координата Z (– · – Земля; – – Марс; –– КА) Том 4 б --Венера --КА с СП —Венера —КА с СП в г ■Венера —КА с СП д е Рис. 3. Изменение фазовых координат КА во времени: а - радиус-вектор r; б - аргумент широты u; в - радиальная скорость Vr; г - трансверсальная скорость Vu; д - долгота восходящего узла Ω; е - наклонение i (– – Венера, –– КА) а б Рис. 4. Зависимости управляющих углов во времени: а - угол λ1; б - угол λ2 Рис. 5. Зависимости функции управления во времени: а - функция управления δp; б - функция управления δs Рис. 6. Изменение расстояния между КА и Венерой (– – радиус сферы Хилла Венеры, –– КА) Рис. 7. Изменение интеграла энергии h Заключение Рассмотрен некомпланарный межпланетный перелет Земля-Венера КА с неидеально отражающим СП, целью которого являлось попадание КА в сферу Хилла Венеры с нулевым гиперболическим избытком скорости. Для формирования номинального управления движением КА использовались законы локально-оптимального управления. Для реализации гелиоцентрического перелета Земля-Венера КА массой 39,8 кг с неидеально отражающим СП площадью 500 м2 потребовалось 946 суток. В качестве результатов получены траектория перелета, изменение фазовых координат во времени, графики изменения управляющих углов и программа номинального управления. Полученные результаты удовлетворяют всем граничным условиям, описанным в постановке задачи. Результаты моделирования подтверждают адекватность применения процедуры формирования программы номинального управления КА с неидеально отражающим СП.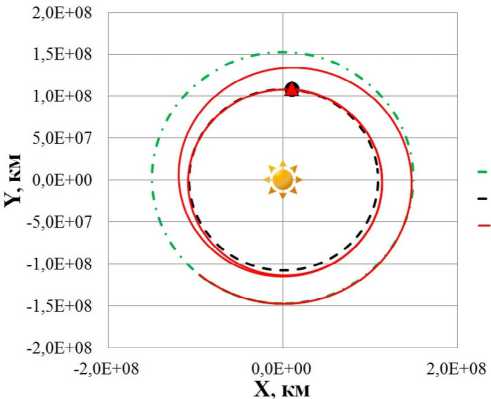

Список литературы Процедура формирования программы номинального управления гелиоцентрическим движением космического аппарата с солнечным парусом с использованием законов локально-оптимального управления
- Поляхова Е. Н. Космический полет с солнечным парусом. М. : Книжный дом «ЛИБРОКОМ», 2011. 320 с.
- Macdonald M. Advances in Solar Sailing // Materials of the Third International Symposium on Solar Sailing Glasgow. 2013. 977 p.
- Johnson L., Whorton M., Heaton A., Pinson R., Laue G., Adams C. NanoSail-D: A solar sail demonstration mission // Acta Astronautica, 2011, vol. 68, pp. 571-575.
- Mori O., Sawada H., Funase R., Morimoto M., Endo T., Yamamoto T., Tsyda Y., Kawakatsu Y., Kawaguchi J. First Solar Power Sail Demonstration by IKAROS // Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology, 2010, vol. 8, issue 27, pp. 25-31.
- Biddy C., Svitek T. LightSail-1 Solar Sail Design and Qualification // Materials of the 41st Aerospace Mechanisms Symposium, 2012, pp. 451-463.
- Heiligers J., Diedrich B., Derbes B., McInnes C. R. Sunjammer: Preliminary End-to-End Mission Design // Materials of AIAA/AAS Astrodynamics Specialist Conference, 2014.
- McInnes C. R. Solar sailing: technology, dynamics and mission applications. Springer Science & Business Media, 2013, 296 p.
- Лебедев В. Н. Расчет движения космического аппарата с малой тягой. М. : ВЦ АН СССР, 1968. 108 с.
- Мирер С. А. Механика космического полета. Орбитальное движение. М. : Резолит, 2007. 270 с.
- Хабибуллин Р. М. Программа управления для некомпланарного гелиоцентрического перелета к Венере космического аппарата с неидеально отражающим солнечным парусом // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2019. Т. 18. № 4. С. 117-128.
- Ишков С. А., Старинова О. Л. Оптимизация и моделирование движения космического аппарата с солнечным парусом // Известия РАН. 2005. Вып. 7. № 1 (13). С. 99-106.
- JPL Solar System Dynamics [Электронный ресурс]. URL: https://ssd.jpl.nasa.gov (дата обращения: 27.09.2018).
