Процедура выбора рулевого привода органов управления автономного подводного аппарата

Автор: Алилуев Сергей Васильевич, Балашов Алексей Леонидович, Поршнев Владимир Александрович, Тетерин Дмитрий Павлович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.18, 2016 года.
Бесплатный доступ
С использованием методов многокритериального гипервекторного ранжирования из множества вариантов реализации рулевого привода для перспективного автономного подводного аппарата осуществлен целевой выбор эффективного - электропневматического привода с гидравлическим тормозом.
Электропневматический рулевой привод, автономный подводный аппарат, системный анализ
Короткий адрес: https://sciup.org/148204351
IDR: 148204351 | УДК: 007.004.3:
Procedure of the steering gear choice of controls of autonomous underwater vehicle
Using the multicriteria hyper vector ranging methods from a set of options of realization the steering drive for perspective autonomous underwater vehicle the target choice of effective electropneumatic drive with a hydraulic brake is carried out.
Текст научной статьи Процедура выбора рулевого привода органов управления автономного подводного аппарата
Проведение современных океанологических исследований требует создания различного типа автономных подводных аппаратов (АПА). Эксплуатационные характеристики и эффективность АПА напрямую зависят от параметров приводов органов управления, проектирование и испытания которых в настоящее время является актуальной научно-технической задачей для разработчиков морской техники. Решение задачи связано, в первую очередь, с формированием множества возможных вариантов инженерной реализации рулевых приводов (РП) в зависимости от их целевого назначения, условий эксплуатации и требований к динамическим характеристикам АПА. Во вторую очередь – с упорядочиванием (ранжированием) вариантов по степени их эффективного использования в составе конкретного АПА и многокритериальным выбором одного или нескольких вариантов подлежащих реализации и испытаниям. Новизну решаемой задачи определяет применение проверенного на практике методического аппарат системного анализа [1, 2] к новому объекту – приводам органов управления АПА.
Методика решения задачи. Процедура синтеза конструкции рулевых приводов АПА заключается в следующем:
-
- генерируется полное множество вариантов реализации РП;
-
- разрабатывается система критериев раскрывающих характерные свойства РП в составе конкретного АПА;
-
- с помощью метода «жесткого» ранжирования [3, 4] осуществляется построение множества эффективных вариантов РП (кортежа Парето) и выбор наилучшего по принятой совокупности критериев для последующей реализации;
-
- выполняется разработка конструкторской документации, изготовление, автономные и комплексные в составе АПА испытания опытных образцов РП.
Множество вариантов реализации РП генерируется с использованием метода морфологического ящика [5]. Результатом использования метода являются морфологические таблицы (табл. 1, 2). В табл. 1 в качестве основных характерных признаков РП выбран тип используемой энергии. Для рассматриваемого АПА приемлемым является использование потенциальной энергии давления, перспективным – электрическая или химическая энергия топлива.
В качестве дополнительных характерных признаков РП выбраны (табл. 2):
-
- тип рабочего тела;
-
- способ накопления энергии;
-
- тип конструкции;
-
- способ соединения штока с рулевым органом;
-
- возможность остановки штока;
-
- способ остановки и удержания штока и др.
Всего в соответствии с приведенной морфологической табл. 2, возможно 3456 вариантов реализации РП (полное множество).
Однако не все альтернативы признаков могут быть использованы при формировании допустимого множества вариантов конструкции РП. Часть из альтернатив исключается в связи с невыполнением требований технического задания на АПА и РП (из-за несоответствия критериям принятия решений). Например, при использовании рабочего тела газ-жидкость:
-
- применение многоблочной конструкции РП нецелесообразно из-за большого количества уплотнений и болтовых соединений, что снижает его надежность, а также из-за невыполнения требований к габаритномассовым характеристикам;
-
- жесткое соединение штока РП с рулевым органом не удовлетворяет требованиям к степеням свободы (допускает лишь одну степень свободы, а необходимо не менее двух);
Таблица 1. Морфологическая матрица
|
Признаки |
Альтернативы (варианты) |
||
|
тип используемой |
электрическая |
химическая |
потенциальная энергия |
|
энергии |
энергия |
энергия топлива |
давления |
Таблица 2. Морфологическая матрица
|
Признаки |
Альтернативы (варианты) |
||
|
тип рабочего тела |
газ |
жидкость |
комбинация газ-жидкость |
|
способ накопления энергии |
накопленная предварительно |
накопленная в процессе функционирования |
накопленная предварительно |
|
тип конструкции |
моноблочный |
многоблочный |
моноблочный / многоблочный |
|
способ соединения штока с рулевым органом |
жесткое (болтовое, заклепки, сварка, пайка) |
шарнирное |
комбинированный, например, шарнирноболтовое |
|
вариант остановки штока РП |
в крайних фиксированных положениях |
в любом заданном положении |
в любом заданном положении |
|
способ торможения |
без торможения |
с регулируемым торможением в конце хода с двух сторон |
с регулируемым торможением в конце хода с двух сторон |
|
конструкция (тип) тормоза |
фрикционная муфта |
пневмоцилиндр |
гидроцилиндр |
|
усилие торможения |
постоянное |
переменное |
комбинированное |
|
особенность конструкции |
вся конструкция из одного материала (титан) |
комбинированный вариант. силовые элементы – из разных материалов |
вся конструкция из одного материала (титан) |
|
особенность заполнения рабочих полостей жидкостью |
постоянное заполнение (в заводских условиях) |
дискретное, с использованием внешней среды (в процессе эксплуатации) |
постоянное заполнение (в заводских условиях |
-
- шарнирное соединение не удовлетворяет требованиям по габаритным характеристикам;
-
- остановка штока РП в крайних фиксированных положениях не обеспечивает требуемую эффективность работы органов управления, не удовлетворяет требованиям к точности;
-
- фрикционная муфта без серьезного усложнения конструкции не может быть применена, т.к. усилия торможения одинаковы, а требуется создавать различные усилия торможения, зависящие от скорости движения объекта;
-
- применение пневмоцилиндра нецелесообразно (возможны перерегулирование, большая динамическая ошибка, недостаточная точность установки органов управления в требуемое положение);
-
- усилие торможения должно быть переменным, поэтому применение постоянного усилия торможения нецелесообразно;
-
- дискретное заполнение рабочих полостей жидкостью с использованием внешней среды применять нецелесообразно, поскольку невозможно обеспечить качественную фильтрацию жидкости, которая к тому же является агрессивной и не обладает смазывающим эффектом.
С учетом проведенного анализа из полного множества реализаций РП допустимых вариантов осталось восемь. Прежде чем проводить анализ оставшихся вариантов необходимо сформировать совокупность критериев для их всесторонней оценки. Совокупность критериев (табл. 3) формируется на основе использования основных положений теории систем, системного анализа, анализа назначения и целей создания РП и АПА, требований ГОСТов и ОСТов (в части касающейся систем, подобных РП), особенностей функционирования РП и возможных сценариев его применения и т.д.
Таблица 3. Система критериев для сравнения (фрагмент)
|
Многовекторные компоненты |
Векторные компоненты |
Скалярные критерии |
Обознач ение |
Примечание (ранги) |
|
тактическая ( К 1 ) |
время выхода на режим ( К 11 ) |
быстродействие (время отклика) |
К 111 |
длительное – 1 среднее – 2 короткое – 3 |
|
точность отработки задающего воздействия ( К 12 ) |
точность отработки задающего воздействия |
К 121 |
высокая – 3 средняя – 2 низкая– 1 |
|
|
техническая ( К 2 ) |
Масса ( К 21 ) |
масса (нижняя граница) |
К 211 |
числовое значение, кг |
|
масса (верхняя граница) |
К 212 |
числовое значение, кг |
||
|
Габариты / объем ( К 22 ) |
объем (нижняя граница) |
К 221 |
числовое значение, см3 |
|
|
объем (верхняя граница) |
К 222 |
числовое значение, см3 |
Алгоритм использования метода «жесткого» ранжирования:
-
1. Формируется неупорядоченное множество вариантов реализации РП
-
2. Определяются критерии принятия решения (требования), по которым будут сравниваться варианты РП:
S = { S i , i = 1, n } , где n - общее количество вариантов РП.
-
- K j ( S i ), j = 1, r — частные критерии, характеризующие вариант Si , где r – количество частных требований;
-
- K j ( S i ) = { K 1 ( S i ) , K 2 ( S i I". K r ( S i )} - векторные критерии, характеризующих вариант s ;
-
- K ( S ) = { K ( S 1 ), K ( S 2 ), ..., K ( Sn )} - множество векторных критериев.
-
3. Назначаются коэффициенты важности или группы коэ ф фициентов важности критериев
-
4. По ре зул ьтат ам попарного сравнения вариантов S k и S l ( k = 1, n , l = 1, n , k * l ) , находятся элементы c kl , оценочной матрицы | c kl |:
- если N kl = 0, N ki = 0, N ki = { 1, r } , то
A = {aj, i = 1, r} - множество коэффициентов важности критериев, где aj - коэффициент важности j-го кри- r терия, причем E aj = 1; A = {A , i = 1, m} - множество j=1 j
групп коэффициентов важности критериев, где
A = {aip, I = 1, r} , ail - коэффициент важности p-го критерия из j-й группы.
C = 1 C = 1 •
-
k, l , l, k ;
-
- если Nkl = { 1, r } , N o = 0, N kl = 0, то
Ck,l = N2, Cl,k = 0, N2 >> 1;
-
- если N kl = 0, N kl = { 1, r } , N kl = 0,
-
5 . Применяется один шаг метода «жесткого» ранжирования, при котором t =1:
то Ck, l = 0, Cl, k = N2;
|
- |
если |
+ N kl * |
0, N k — l = 0, |
Nkl |
* 0, |
то |
|
Ck , l |
= N з , C l , k = 0,1 << N з < N 2 ; + — |
|||||
|
- Ck , l |
если = 0, C l |
N kl = 0, N kl * 0, k = N 2 ; + — |
N kl |
* 0, |
то |
|
|
- Ckl |
если = E aj j Э N k + l |
N kl * 0 ( ^ E " j < j Э N k - 2 |
, N kl * 0, , Ck , l = ( Cl , k ) ’ |
| N = l |
> 0 , |
то |
+ — — где nw, Nkl, Nkl - подмножества номеров соответ ственно лучших, худших и равных критериев.
( t )
-
- определяются характерные числа: N l - количество
вариантов из рассматриваемого множества, которые ( t )
доминируют над вариантом l; мt - количество вариан-
( t )
тов над которыми доминирует вариант l; Cki max - во сколько раз вариант l «превышается» вариантом к ( k = 1, n , k * l ) ;
-
- выбирается лучший вариант Si с минимальным зна- ( t )
чением N l , если таких вариантов несколько, то лучшим среди них будет вариант с максимальным значе- ( t )
нием M l ,если число вариантов с равными максимальными значениями более одного, то лучшим будет ( t )
вариант с минимальным значением Ckimax, если луч- шие варианты имеют соответственно равные значения (t) (t) (t)
н, , м, , c , то такие варианты считаются эквива-l l kl max лентными.
Если задача решается для множества групп коэффициентов важности, то пп. 4, 5 повторяются для каждой группы. Пункты 1-4 метода подробно раскрыты в [3]. С точки зрения системного анализа выбор наилучшего варианта РП сводится к задаче гипервекторного ранжирования, метод решения которой изложен в [4].
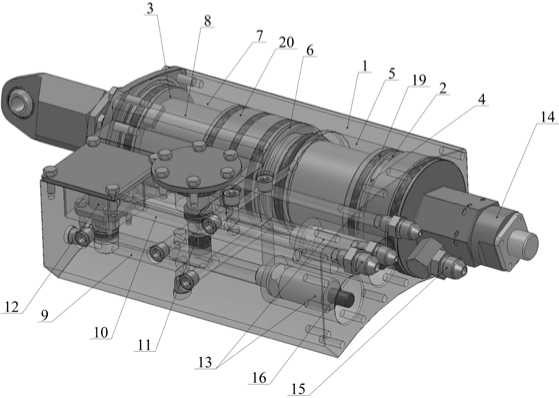
Рис. 1. Трехмерная модель электропневматического РП с гидравлическим тормозом
Электропневматический рулевой привод с гидравлическим тормозом. В результате решения задачи многокритериального гипервекторного ранжирования вариантов реализации РА для АПА разработан новый тип привода (рис. 1, 2) – электропневматический с гидравлическим тормозом. Конструктивной особенностью РП является наличие гидроцилиндра с двумя рабочими камерами – пневмокамеры в виде надувных баллонов, взаимодействующих в противофазе с гидравлическими камерами и сообщённых посредством распределителей с источником давления и разряжения.
Привод включает в себя общую корпусную оболочку 1 , куда входят пневмоцилиндр 2 и гидроцилиндр 3 с камерами 4-7 . Камеры представляют собой внутренние полости, в них установлен единый шток 8 пневмоцилиндра 2 и гидроцилиндра 3 . Камеры 4 и 5 – соответственно надплунжерные и подплунжерные полости пневмоцилиндра 2, камеры 6 и 7 – cоответ-ственно надплунжерные и подплунжерные полости гидроцилиндра 3 . Надплунжерная 6 и подплунжерная 7 полости гидроцилиндра 3 соединены между собой параллельными каналами 9 и 10 для перепуска рабочей жидкости из одной полости 6 в другую полость 7 . В канале 9 установлены клапан с пневмоприводом 11 и датчики измерения давления 13 , а в канале 10 – электромагнитный клапан 12 и датчик линейного перемещения 14.
В каналах подачи воздуха 15 и 16 установлены стравливающие электромагнитные клапаны 17 и 18 , а на едином штоке 8 жестко закреплены пневмоплунжер
19 и гидроплунжер 20 . Датчик линейного перемещения 14 контролирует линейное положение штока 8 . Датчики давления 13 измеряют давление в надплунжерной 6 и подплунжерной 7 полостях гидроцилиндра 3 . Датчик линейного перемещения 14 и датчики измерения давления 13 вырабатывают сигналы отрицательной обратной связи. Конструкция предлагаемого рулевого привода защищена патентом на полезную модель [6].
Особенности взаимодействия элементов электропневмогидравлического рулевого привода. В исходном положении надплунжерные 6 и подплунжерные 7 полости гидроцилиндра 3 , параллельные каналы 9 и 10 заполнены рабочей жидкостью. Электромагнитный клапан 12 работает в режиме широтноимпульсной модуляции, обеспечивающей переменное гидравлическое сопротивление канала 10 . При подаче воздуха в полость 4 пневмоцилиндра 2 через канал 15 открывается стравливающий электромагнитный клапан 17 . Под действием внутреннего давления в полости 4 плунжер 19 пневмоцилиндра 2 совместно со штоком 8 и плунжером 20 гидроцилиндра 3 перемещается вправо. Воздух из подплунжерной полости 5 вытесняется в атмосферу через выключенный стравливающий электромагнитный клапан 18 . Одновременно рабочая жидкость, находящаяся в подплунжерной полости 7 гидроцилиндра 3 , перетекает через открытый клапан с пневмоприводом 11 и электромагнитный клапан 12 по каналу 9 в надплунжерную полость 6 гидроцилиндра 3 . Тем самым достигается минимальное тормозное усилие на едином штоке 8, создаваемое гидроцилиндром 3 .

Рис. 2. Опытный образец электропневматического РП с гидравлическим тормозом
При подходе единого штока 8 к заданному положению система управления закрывает клапан с пневмоприводом 11 , рабочая жидкость перетекает из подплунжерной полости 7 гидроцилиндра 3 по каналу 10 через электромагнитный клапан 12 в надплунжерную полость 6 , при этом гидравлическое сопротивление канала 10 возрастает. Расход жидкости через канал резко падает, давление подплунжерной полости 7 гидроцилиндра 3 возрастает до максимального значения, что приводит к резкому торможению единого штока 8 . Для фиксации штока 8 в данном положении выключается стравливающий электромагнитный клапан 17 . Расход жидкости через электромагнитный клапан 12 прекращается, давление в полостях 6 и 7 гидроцилиндра 3 выравнивается, единый шток 8 и рабочий орган фиксируются с высокой точностью, поскольку рабочая жидкость несжимаема. При перемещении единого штока 8 в обратном направлении работа элементов гидравлического привода аналогична.
При подаче воздуха в полость 5 пневмоцилиндра 2 через магистраль 16 открывается стравливающий электромагнитный клапан 18 , в результате чего под действием внутреннего давления в полости 5 плунжер 19 пневмоцилиндра 2 совместно со штоком 8 и плунжером 20 гидроцилиндра 3 перемещается влево. Воздух из надплунжерной полости 4 вытесняется в атмосферу через выключенный стравливающий электромагнитный клапан 17. Одновременно рабочая жидкость из надплунжерной полости 6 гидроцилиндра 3 перетекает через открытый клапан с пневмоприводом 11 по каналу 9 и электромагнитный клапан 12 по каналу 10 в подплунжерную полость 7 гидроцилиндра 3 , чем достигается минимальное тормозное усилие на штоке 8 .
При подходе штока 8 к заданному положению система управления закрывает клапан с пневмоприводом 11. Рабочая жидкость перетекает из надплунжерной полости 6 гидроцилиндра 3 через электромагнитный клапан 12 по каналу 10 в подплунжерную полость 7. Гидравлическое сопротивление канала 10 при работающем в режиме широтно-импульсной модуляции электромагнитном клапане 12 возрастает. Расход жидкости через него резко падает, давление в надплунжерной полости 6 гидроцилиндра 3 возрастает до максимального значения, что приводит к резкому торможению штока 8. Для фиксации штока 8 в данном положении выключается стравливающий электромагнитный клапан 18. Расход жидкости через электромагнитный клапан 12 прекращается, давление в полостях 6 и 7 гидроцилиндра 3 становится одинаковым, рабочий орган фиксируется с высокой точностью.
Выводы: с использованием методов системного анализа, гипервекторного ранжирования синтезирован наилучший по совокупности критериев вариант комбинированного РП АПА. Разработана конструкция, характеристики которой соответствуют требованиям технического задания на разработку АПА и РП. Выполнены предварительные испытания опытных образцов РП, которые показали, что установка рулевого органа АПА в заданное положение и последующая его фиксация осуществляются с высокой точностью во всех режимах эксплуатации.
Список литературы Процедура выбора рулевого привода органов управления автономного подводного аппарата
- Сафронов, В.В. Основы системного анализа: методы многовекторной оптимизации и многовекторного ранжирования: Монография. -Саратов: Научная книга, 2009, 329 с.
- Сафронов, В.В. Построение истинных кортежей Парето в задачах гипервекторного ранжирования систем//Надежность и качество сложных систем. 2014. № 4(8). С. 11-18.
- Сафронов, В.В. Сравнительная оценка методов «жесткого» ранжирования и анализа иерархий в задаче гипервекторного ранжирования систем//Информационные технологии. 2011. №7. С. 8-13.
- Сафронов, В.В. Гипервекторное ранжирование сложных систем//Информационные технологии. 2003. №5. С. 23-27.
- Быстров, Л.Г. Решение линейных дифференциальных уравнений. Аналитико-числовые методы и алгоритмы: монография. Часть 1/Л.Г. Быстров, Г.С. Говоренко, А.В. Гориш и др.,. -М.: МГУЛ, 2004. 440 с.
- Патент № 114738 РФ, МПК F15B11/072. Пневмогидравлический привод/А.В. Алилуев, С.В. Алилуев, Г.С. Говоренко и др. Заявл. 23.12.2011; опубл. 10.04.2012. Бюл. № 10.
