Продольно-поперечные геометрически нелинейные волны деформаций

Автор: Бакушев Сергей Васильевич
Журнал: Ученые записки Петрозаводского государственного университета @uchzap-petrsu
Рубрика: Физико-математические науки
Статья в выпуске: 6 (143), 2014 года.
Бесплатный доступ
Рассматривается задача построения дифференциальных уравнений характеристик и соотношений на них, а также определения скоростей распространений продольно-поперечных волн деформаций в сплошной среде, механическое поведение которой описывается геометрически-нелинейными аналогами произвольных перекрестных зависимостей между первыми инвариантами тензоров и вторыми инвариантами девиаторов обобщенных напряжений и деформаций. Исследуются условия возникновения чисто продольных и чисто поперечных волн. В качестве примера строятся векторные диаграммы продольно-поперечных геометрически-нелинейных волн деформаций для трех геометрически-нелинейных аналогов математических моделей сплошной среды.
Волны деформаций, плоская задача, физическая нелинейность, геометрическая нелинейность
Короткий адрес: https://sciup.org/14750726
IDR: 14750726 | УДК: 534.12
Longitudinal-cross geometrical non-linear waves of deformation
The author considers the task of constructing differential equations' characteristics and relations on them. The other task was to define the speed of propagation of longitudinal-cross deformation waves in continuum, mechanical behavior of which is described by arbitrary cross relations between the first invariants of tensors and second invariants of stress and deformation deviators. Conditions of the origin of purely longitudinal and pure cross-waves were researched. As an example, the vector diagrams of long cross-waves' deformation for three mathematical models of continuum are constructed.
Текст научной статьи Продольно-поперечные геометрически нелинейные волны деформаций
Задача определения напряженно-деформированного состояния полупространства при действии на его поверхности изменяющихся во времени нормальных p ( t ) и касательных q (t ) нагрузок (рис. 1) сводится, вообще говоря, к определению параметров продольно-поперечных волн деформаций, распространяющихся в сплошной среде.
Для сплошной среды, механическое поведение которой описывается уравнениями теории пластического течения, либо уравнениями динамики грунтов С. С. Григоряна, либо уравнениями билинейной теории пластичности, обзор решений данной задачи изложен в монографии [3].
G * ( е * , Г * ) - геометрически-нелинейный аналог модуля сдвига.
Пусть на поверхности полупространства действуют равномерно-распределенные нагрузки, бесконечно протяженные в направлении осей у и z (см. рис. 1). Полупространство будет находиться в условиях плоской задачи:
u = u ( х ), v = v ( х ), w = 0. (2)
Тогда [1]:
*
8x
9 u 1
9 х 2
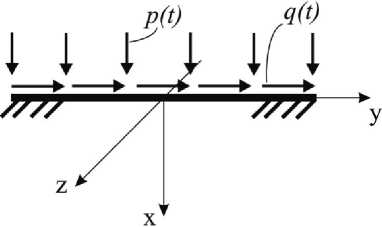
Рис. 1
8 у
9 v 1 =— + —
.*
xy
9 у
*
yx
9 u
2 9 у
[г I2 к9 у
= 0,
9 u 9 v
9 u 9 u
9 v 9 v 9 v
= +---+ +---=--
9 у 9 х 9 х 9 у 9 х 9 у 9 х
* * . * *
При этом 8 = 8 + 8 = 8 , xyx
= У**у ( х ) .
В данной работе рассматриваются сплошные среды, механическое поведение которых описывается геометрически-нелинейными аналогами произвольных перекрестных зависимостей между первыми инвариантами тензоров о * и е * и вторыми инвариантами девиаторов T * и Г * обобщенных напряжений и деформаций:
о * = 3 К(е * , Г * ) е * ; Т * = G * (е * , Г * ) Г * , (1) здесь К *( е * , Г * ) - геометрически-нелинейный аналог модуля объемного расширения (сжатия), © Бакушев С. В., 2014
Г* = V 4 (=. )2+3 (/X, у )2 /V3.
Физические уравнения для геометрически-нелинейной модели сплошной среды имеют вид:
* * *„* *
ах = K + ~G 8 ; т = G У ;
xxyxy к 3
ау = | K* -2G* 8*; т*z = 0;
к 3у
* TZ* ^ * **
az = K —G 8 ; т^ = 0.
zzx к 3 у
Подставляя соотношения (5) в динамические уравнения равновесия без учета объемных сил



а дх

получаем систему четырех дифференциальных уравнений первого порядка в частных производных относительно величин
Ф Ф д Vx д vy . '^ дУу д Vx дx ’ дx ’ д t ’ д t ’ д t ’ д t ’ дx
В матричной форме система уравнений (7), (10)
имеет вид:
d"v
ди ди
А — + В— = 0.
дх at
Здесь матрицы A и B равны:
и учитывая зависимости (1) и (4), получим два уравнения, описывающих процесс распространения продольно-поперечных геометрически-не-линейных волн деформаций:
Ф + Ф^ + 5)<^=p^p
OX ot
^ + £хЪхУА + С^^ ■ ox
xvWxv + Ф lC/ху + Г»)}^ = Р^ ■ ' ■ ox ot
Здесь введены обозначения:
д и
д v
д и
Е =-- V =-- V =-- V x дx ’ /xy дx ’ x д t ’ y
co, 8x
^. (8) д t
аи ар 00
А = 222
0 0-1о ’
0 0 0-1
"0 0 -рО’
О 0 0
в=,
10 00
0 100
причем
«11=к+4С7з)Г + (г;+/|,.)/2]+ + 0 + ^ )2 ^;
«и =(i + ^)UrXv +5);
«21 =(1 + ^)ки + с); (12)
Значения коэффициентов A , B , C , D равны:
ак 4 ас
ds 3 дг
дК 4 дС
ЗГ
аг* заг* ’
ак 4 ас
г
аг* заг* ’
«22 - (^ + 4G /з)^ + (^f + /|v)/2] +
+ Уху^Гху +_в)+ (с Уху + 79).
Вектор-столбец u имеет следующую структуру: u _Г ^ к, vx Vv Т.
xxy x y
Характеристические кривые уравнения (11) определяются путем решения уравнения | A - ^ B| = 0 или в развернутой форме:
Л'Т
ас 45 ас as* зг* аг
D = G*

ac*
|
« 11 |
« 12 |
ap |
0 |
|
|
a 21 |
« 22 |
0 |
ap |
_ 0 , |
|
-a |
0 |
-1 |
0 |
|
|
0 |
-a |
0 |
-1 |
r* ar*’
Присоединяя к уравнениям (7) уравнения совместности
вещественные решения которого задают характеристические кривые, описываемые дифферен-
Эе dv ду dv
°х _ vx • xy _ y_ д t дx ’ д t дx ’
циальными уравнениями:
aij
dx
, i 1,2; j 1,2. dt
Здесь
Пусть го ( x , t ) = 0 - уравнение поверхности разрыва [4]. Применяя кинематические условия сов-
« 1,1 + V M 1 / ( 2 р ) ,
« 1,2 V M 1 /( 2 р ) ,
местности
« 2,1 - + M^ ^ 2 р ) ,
« 2,2 - -7 M 2 /(2 Р ) ,
д 2 и д x j д x k
дю дю .
--2 к системе (18),
u дxj дxk
получим динамические условия совместности:
причем
M 1,2 ( a 11 + a 22 ) — \(a 11 a 22 ) + 4 a 12 a 21 - (14)
Дифференциальные уравнения (13) определяют, вообще говоря, четыре семейства характеристических кривых. Система уравнений (7), (10) будет гиперболического типа, если все a i j будут вещественными. ,
Найдем соотношения вдоль характеристических направлений. Введем вектор l = [ 1 1 1 2 1 3 1 4]. Компоненты вектора l являются решением уравнения l • ( A - « В ) - 0 , откуда находим:
( а п - а 2 р ) • 1 1 + a 21 • 1 2 - 0;
( a 22 - а 2 р ) • 1 2 + а 12 • 1 1 - 0;
13 - ар • 11 - 0;
1 4 - ар- 1 2 - 0.
Соотношения вдоль характеристик найдем на
- ( d u )
основании уравнения l • В • --- - 0, откуда dt
1 dp + 1 d ^ xy dt dt
dv
a
а 21
- р1 1 "v - р1 2 v - 0- (16) dt dt
Используя далее зависимости (15), уравнение (16) приведем к виду:
а 21 ( « 2 р - а 22 ) ( « " ^ - "v .) +
+ а ( а 2 р - а11 )( « 2 р - а 22 ) d y xy - а12а 21 dv y - 0.
Итак, вдоль четырех семейств характеристик (13) выполняются соотношения (17).
Запишем систему уравнений (7), (10) в терминах перемещений. Используя соотношения (8), систему (7) приведем к виду:
д2 и д2 v д2 и а" а?+а'2 э? - р а?;
д2 и д2 V д2 V а21 3? + а22 5? = ^-I
Система (10) при этом удовлетворяется тождественно.
2 дю У удxj
2 дю А 2 у д x j
2 д ю А 2
- р I уд t J
2 и + а 22
2 и + а 12
2 дю У у д x j
2 дю ) .
—— 2 д x J
2 д ю А 2
- р I уд t J
- 0;
((19) - 0.
Поскольку значения скоростей распространения волн N по нормали к фронту определяются соотношением:
а направляющие ко синусы 1i вектора нормали к фронту волны в локальной системе координат, совпадающей с главными осями, равны
то система (19) после элементарных преобразований получает вид:
( а ,, 11 - Р N 2 ) 2 „+ а ,2 11 2 . ; - 0;
«112, + ( аи1 ,2 - Р N2 ) 2 - 0.
2 1 1 U | 22 1 U ^
Приравнивая к нулю определитель системы (20), то есть полагая для коэффициентов прерывности 2 и 1 и 2 и 2 существование ненулевых решений, получим:
f (20)
2 р №2 - 1 12 ( а 11 + а 22 )±7( а 11 - а 22 ) 2 + 4 а 12 а 21
Формула (21) определяет две независимые скорости распространения продольно-поперечных волн деформаций в сплошной среде.
Выпишем коэффициенты, входящие в формулы (19) и, соответственно, в формулу (21). При этом буд ем помнить, что в главных осях
* ду* ду„
Y xy - Y yx - 0 , однако — xy- ^ 0 и —— ^ 0 .
дx ду
Кроме того, для данной задачи у х у - y xy .
На основании соотношений (4) получаем е j^ = ^3/4 . Теперь коэффициенты A , B , C , D ,
определяемые соотношениями (9), будут равны:
Случай 1 . Пусть l 1 = 1, l 2 = 0, то есть главное направление x 1 совпадает с направлением нормали к фронту волны ( α = 0). Система (20) получает
+
Г дк * ^дГ *
д К * де*
4 д G * ^ + 3 де .
4 д G *)
3 дГ* ,
Г * ;
B = 0; C = 0; D = G * .
Следовательно,
a 11
д к * 4 д G * ) /3 * ^де + 3 де J 44 1 +
^дК^ 4 д G* ' ^дГ * + 3 дГ * ,
a,2 = 0; a21 = 0;
a 22
Г* + G *.
3Г*+
Г *
+
; (22)
С учетом соотношений (22) формула (21) получает вид:
2 p N 2 = Г; ( 2 a , ) ; 2 p N 2 = l f ( 2 a 22 ) . (23)
Рассмотрим условия возникновения и распро-
странения чисто продольных и чисто поперечных волн деформаций.
В локальной системе координат, совпадающей
в каждой точке сплошной среды с направлениями главных деформаций (напряжений), введем вектор X с составляющими ( A u , Au^ ) в каждой
точке сплошной среды. Пусть λn – проекция вектора λ на нормаль к переднему фронту волны
(рис. 2), то есть A n = A u I, + A u J 2 , где l , = Cos ( a ), l 2 = Sin ( α ); l 1 и l 2 – направляющие косинусы нормали к переднему фронту волны.
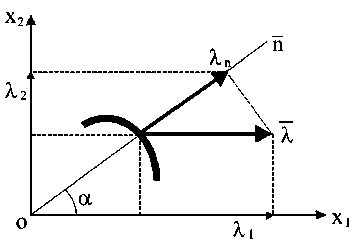
Рис. 2
вид:
( a n - p N 2 ) A u , = 0;
( a 22 - p N 2 ) A u 2 = 0.
Отсюда получаем: N , 2 = a ,,/ p , N 2 2 = a 22/ p .
Рассмотрим распространение волны N1. Если N = N1, то система (24) приводится к виду:
0 • A„,= 0;
( a 22 - p N 2 ) A . 2 = 0,
то есть так как a 22 ^ p N , 2 , то Au2 = 0 . Это означает, что из двух составляющих вектора λ одна равна нулю, то есть проекции A n и A u совпадают с самим вектором λ , то есть главное направление x 1 и нормаль к фронту волны n – совпадают с вектором скорости N 1. Имеет место чисто продольная волна.
При рассмотрении распространения волны N 2, то есть N = N 2, система (24) получает вид:
(a,, -pN2)A.,= 0;'
Г
0 • A = 0.
u 2
Это означает, так как a ,, ^ p N 2 , что A u = 0 , то есть проекции A n и A u совпадают с самим вектором λ . Следовательно, главное направление x 1 и нормаль к фронту волны n – перпендикулярны к вектору скорости N 2. Имеет место чисто поперечная волна.
Случай 2 . Пусть l 1 = 0, l 2 = 1, то есть главное направление x 2 совпадает с направлением нормали к фронту волны ( α = 90°). Система (19) полу-
чает вид:
-pN2 A = 0;
u 1
-pN2 A = 0.
u 2
Отсюда следует, что N = 0, то есть в направлении главного направления x 2 волна не распространяется.
На рис. 3 показаны векторные диаграммы мгновенных скоростей продольно-поперечных геометрически-нелинейных волн деформаций, построенные по уравнениям (23) для трех математических моделей сплошной среды.
Модель 1 . Механическое поведение сплошной среды описывается линейным законом, то есть деформационные зависимости (1) имеют вид:
σ * = K 0 ε *; T* = G 0Г*. (26)
Модель 2 . Механическое поведение сплошной среды описывается квадратичным законом в от-
ношении сдвиговых деформаций. Деформационные зависимости (1) в этом случае равны:
σ * = K 0 ε *; T* = G 0 (1 – Г*/ (2Г s )) Г*. (27)
Модель 3 . Механическое поведение сплошной среды описывается перекрестными зависимостями между инвариантами напряженного и деформированного состояний:
a = K о [ 1 - ( q/ г )( 2 -Г/Г , ) 2 ( Г/Г , ) 2 ] г;
T = [ G о ( 1 - Г * /( 2 Г , ) ) + K 0 f ( ql Г , ) ( 2 - Г */ Г , ) 2 ( г */ Г , ) -
-
- K о f (г/ Г * ) ] Г * . (28)
Модель 1 соответствует геометрически-нели-нейному аналогу линейной теории упругости, модель 2 соответствует геометрически-нелиней-ному аналогу теории малых упруго-пластических деформаций, модель 3 соответствует геомет-рически-нелинейному аналогу деформационной теории пластичности сыпучей среды [1], [2].
На рис. 3 сплошная линия соответствует приведенным скоростям 2 p N 2 G 0 , пунктирная -скоростям 2 p N 22 G 0 .
В формулах (26), (27), (28) имеем: K 0 – начальный модуль объемного расширения (сжатия); G 0 – начальный модуль сдвига при чистом сдвиге; f – аналог коэффициента внутреннего трения; q – коэффициент дилатансии; Г s – предельная интенсивность деформаций сдвига, причем 0 ≤ Г*/ Гs ≤ 1.
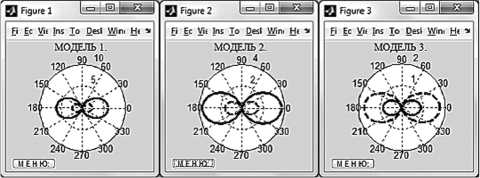
Рис. 3. Векторные диаграммы мгновенных скоростей продольно-поперечных геометрически-нелинейных волн деформаций
Исходные данные:
K 0/ G 0 = 1,1547; q /Г s = 1; Г*/Г s = 0,75;
Г s = 0,1155; f = 0,5.
Численные исследования показывают, что скорости распространения продольно-поперечных волн деформаций существенно зависят как от рассматриваемого направления распространения волны, так и от уровня напряженного и деформированного состояния в рассматриваемой точке среды, а также от величины физических констант материала сплошной среды.
Изложенные в статье результаты могут быть использованы при построении алгоритмов расчета напряженно-деформированного состояния геометрически и физически нелинейных полупространств, находящихся в условиях плоской деформации, от действия на поверхности динамических, в том числе ударных, нагрузок.
LONGITUDINAL-CROSS GEOMETRICAL NON-LINEAR WAVES OF DEFORMATION
Список литературы Продольно-поперечные геометрически нелинейные волны деформаций
- Бакушев С. В. Геометрически и физически нелинейная механика сплошной среды: Плоская задача. М.: Книжный дом «Либроком», 2013. 312 с.
- Гениев Г. А. К вопросу о деформационной теории пластичности сыпучей среды//Строительная механика и расчет сооружений. 1974. № 4. С. 8-10.
- Новацкий В. К. Волновые задачи теории пластичности/Пер. с польского В. А. Шачнева; Под ред. Г. С. Шапиро. М.: Мир, 1978. 307 с.
- Смирнов В. И. Курс высшей математики. Т. 4. Ч. 2. М.: Наука, 1981. 550 с.
