Проектирование конвертеров с широтно-импульсной модуляцией на основе метода гармонической линеаризации

Автор: Ловчиков Анатолий Николаевич, Носкова Елена Евгеньевна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (21), 2008 года.
Бесплатный доступ
Рассмотрены вопросы выполнения проектных процедур анализа и синтеза конверторов с широтно-импульс-ной модуляцией на основе метода гармонической линеаризации, показаны преимущества данного метода при проведении структурного синтеза.
Конвертер, широтно-импульсная модуляция, гармоническая линеаризация
Короткий адрес: https://sciup.org/148175749
IDR: 148175749
Converters with pulse-width modulation design on the basis of harmonic linearization method
The problems of the design procedures of convector analysis and synthesis with pulse-width modulation on the basis of harmonic linearization method are regarded. The advantages of this method while structural synthesis are given.
Текст научной статьи Проектирование конвертеров с широтно-импульсной модуляцией на основе метода гармонической линеаризации
Одним из основных элементов электропреобразова-тельной аппаратуры (ЭПА) системы электропитания (СЭП) спутника является преобразователь постоянного напряжения в постоянное - конвертер, основная задача которого состоит в стабилизации напряжения на выходе СЭП. Процесс проектирования ЭПА в составе СЭП осложняется тем, что конвертор любой топологии (с параллельным или с последовательным включением ключевого элемента) представляет собой систему автоматического регулирования с широтно-импульсной модуляцией (ШИМ), которая относятся к классу нелинейных импульсных систем.
Синтез конвертеров с ШИМ на начальной стадии проектирования сводится к расчету периодических процессов в нелинейной системе. Для решения этой задачи используются методы теории нелинейных колебаний, которые могут быть условно разделены на графоаналитические, численные и аналитические.
Среди графоаналитических методов следует отметить метод фазовой плоскости для качественного исследования нелинейных колебаний.
Численные методы решения являются основными методами анализа в современной практике научно-инженерных расчетов. Это группы широко распространенных явных и неявных методов решения систем обыкновенных дифференциальных уравнений, однако при их алгоритмической и программной реализации в расчетах периодических процессов в конвертерах могут возникать недетерменированные выходные сигналы, например стохастические режимы или «биения» в вычислительном эксперименте, что создает значительные трудности для разработчиков ЭПА. Принятие проектного решения в данном случае будет полностью зависеть от опыта и квалификации разработчика. Кроме того, применение математического описания конвертеров в виде системы дифференциальных уравнений позволяет решать задачи параметрического синтеза, но существенно затрудняет решение задач структурного синтеза.
Указанных проблем лишены аналитические методы расчета периодических процессов в нелинейных системах, например методы асимптотических разложений, гармонического баланса и гармонической линеаризации. При этом, несмотря на большой объем и сложность аналитических преобразований, одним из главных их достоинств является возможность выполнения анализа периодических процессов при символьном задании параметров ЭПА и обозрения процессов в целом, что может значительно повысить эффективность принятия проектного решения на этапе функционального проектирования.
Рассмотрим применение метода гармонической линеаризации при проектировании конвертера понижающего типа с ШИМ (рис. 1,2).
Рис. 1. Схема конвертера
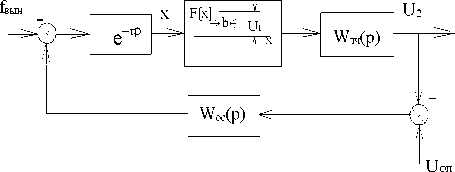
Рис. 2. Структурная схема конвертера еч - звено запаздывания, моделирующее запаздывание срабатывания транзисторного ключа; А[х] - релейный элемент, моделирующий работу ключа; И7лч(р) - передаточная функция участка схемы вход-выход фильтра^^ - источник вынужденных колебаний, моделирующий работу генератора пилообразного напряжения; И7 (р) - передаточная функция, вид и параметры которой необходимо определить
Как это следует из принципа работы конвертера, в нем всегда присутствуют вынужденные периодические колебания. Однако эти колебания при определенных параметрах элементов конвертера порождают автоколебания, которые могут существенно повысить коэффициент пульсаций выходного напряжения или привести к потере устойчивости.
Задача синтеза в этом случае сводится к определению передаточной функции W (р), которая позволила бы исключить возможность возникновения автоколебаний.
В соответствии со структурной схемой (рис. 2) уравнение динамики системы имеет вид [1]
х+^л»е-‘р^ос(р)А[х] =
= W (р) U -f (?). (1)
О.С^ z о.п ^вын4 z х z
В уравнении (1) принято допущение /вын(0 = = Bsin(co2 Э).
Периодический процесс может быть представлен в виде
\ = \„+\.. (2) гдеХм= Хо+ХА - медленно меняющаяся составляющая, здесь Хо - постояннаясоставляющая; Ха = Д -бтС) -t) -переменная составляющая, характеризующая автоколебания; a>j - частота автоколебаний; Хг = 4 -sin(a)2 -/+<р) -переменная составляющая, характеризующая вынуяеденные колебания в системе, здесь со2 = Тп.]Т - частота вынужденных колебаний (Г- период переключения).
Амплитуда вынуяеденных колебаний определяется по выражению
___________________________ЛЗ)
0(/со2) + Л(/со2) • е^тг ■ Woc (/со2) • (? + ;V)|2
где W^^ = R(p)/Q(p)\ q,q’ - коэффициенты гармонической линеаризации:
11' м । I1'М
V А? V 42
\ 1 2 1 2/
?U) = "
2-4 •/>
4 - л
Характеристика нелинейного звена
FM = F°C424m)+№W + где F°(A,X ) = — + 1 arcsin+ ^м -arcsin-——1.
м 2 44 J
Решая (4), для заданной нелинейности F[x] можно определить функцию смещения:
F4A2,X^QC),(5)
которая в дальнейшем используется при определении автоколебательного режима и решения уравнения для постоянных составляющих. Для этого линеаризуем функцию смещения Ф(А') в пределах рабочего режима системы:
Ф(Х ) = Ф° + К -X , v м -' а а ’
АФ где Ха = -—
С учетом (4), (5) и (6) система уравнений для определения возможности возникновения автоколебательного режима имеет вид
6(0)4+40) 4,.с(0)Ф°=
= ^.с(°)^пе(0),
Q(p)ХА + R(p) е"' Wo c(p) кха = 0. (7)
После подстановки в (7) p=jtox определяются А). .1 и со т. е. условия возникновения или отсутствия автоколебаний в системе, на основании чего делается заключение об устойчивости системы. Изменяя W (р) и используя изложенную выше методику, можно синтезировать рассматриваемый конвертер исходя из обеспечения отсутствия автоколебаний в системе.
Представленный метод был использован при анализе и синтезе конкретного конвертера.
Передаточная функция линейной части этого конвертера имеет вид
W (р) =-----------, л ч а2 • р1 + ах • р +1
где Клч = 4/(4+ri) -коэффициентпередачи,здесь4 - сопротивление нагрузки, гх - активное сопротивление обмотки дросселя фильтра; а2 = К -L-С, здесь L - индуктивность дросселя фильтра; С - емкость конденсатора фильтра; ах = (L+RH-rx-C)/(RH+rx).
Расчеты проводились при следующих исходных данных: частота преобразования 25 кГц; Ux = 40 В; Uon = 27 В; L = 10 мкГн; С= 5 мФ; г = 0,01 Ом; 1= 1 мкс; 4= 1 ®Mi В = 0.2 В: /А-передаточная функция звена обратной связи, К = 1; b - зона нечувствительности компаратора, Ь = 0,001.
Согласно [2] и рис. 2, процессы в конвертере с ШИМ описываются уравнением динамики (1). Решение этого уравнения находится в виде (2) из системы уравнений для медленно меняющихся и колебательных составляющих. После решения (4) определяется функция смещения (5), линеаризуемая в пределах рабочего режима конвертора (6). Рассчитанные функции смещения при различных значениях параметров фильтра (рис. 3) показывает, что значение 4 в рабочей точке равно 14... 15.
Уравнение (1) теперь примет вид (7), и неизвестные Av cOj иХо определяются из (7) подстановкой р =Jax:
1-а2 -т2 + К. -К^ - К -cos^j -т) = 0, ах -со. -К -К -X-si^co.-т) = 0, (8)
х0 + клч-к-ф° = к
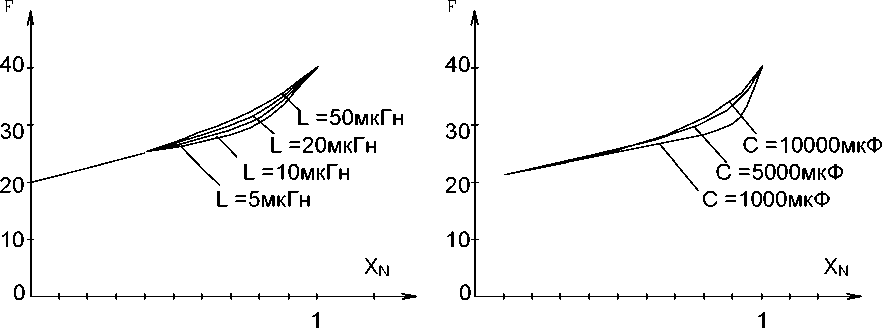
Рис. 3. Функции смещения
При решении (8) частота предполагаемых периодических колебаний/^ намного меньше частоты вынужденных колебаний. Отсюда величина 271/"-т = ю -т мала и sin (сут) » cOj-t, a cos (сут)« 1. Искомое решение для автоколебаний системы, те. условие их существования, определится по выражению гг-С + LYH-К-т-Ка =0 . (9)
При подстановке значений параметров в (9) следует, что в системе отсутствуют автоколебания. Однако если совместное запаздывание ключа и компаратора будет равно 4 мкс, то в системе возникнут автоколебания с частотой 2,5 кГц.
Рассмотренный выше конвертер является основой системы электропитания космических аппаратов, качество работы которой обусловлено протекающими в ней электромагнитными процессами. Представленная методика анализа и синтеза конвертеров СЭП как нелинейной системы позволяет на схемотехническом уровне проектирования на основании заданных критериев исследовать и формировать электромагнитные процессы как в конвертере, так и во всей СЭП в целом.
Предложенная в статье методика структурно-параметрического синтеза конвертеров с широтно-импульсной модуляцией позволяет, используя хорошо апробированный метод, с высокой точностью решать задачи анализа и синтеза: оценивать устойчивость системы и синтезировать ее, исходя из заданных запасов устойчивости. Рассмотренный метод хотя и позволяет уже сейчас решать большое количество задач, связанных с синтезом конвертеров, однако требует дальнейшего развития для решения более сложных проблем, например анализа и синтеза конвертеров, работающих в режиме прерывистых токов дросселя.
