Проектирование привода конвейера в системе Компас-3D

Автор: Родиошкин Михаил Юрьевич, Масленникова Людмила Васильевна, Арюкова Ольга Александровна, Родиошкина Юлия Григорьевна
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технические науки
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
Введение. В современных условиях перед инженерами встают задачи сокращения сроков конструкторско-технологической подготовки производства с одновременным повышением качества разрабатываемой технической документации. Данные задачи могут быть решены при использовании CAD/CAE/CALS-технологий в промышленном производстве. Проектирование изделий машиностроения связано c моделированием деталей и трехмерных сборок в графических систем автоматизированного проектирования (САПР) с последующим инженерным анализом. В статье рассматривается последовательность проектирования привода конвейера с помощью прикладных библиотек КОМПАС. Материалы и методы. При помощи прикладных библиотек КОМПАС были проведены расчет и моделирование механических передач, входящих в состав привода конвейера. Также были выполнены проектный расчет и построение в КОМПАС-3D трехмерной модели привода. Результаты исследования. Была предложена последовательность проектирования привода конвейера с помощью библиотек КОМПАС-3D. Обсуждение и заключения. В результате исследования была разработана методика создания трехмерной модели привода конвейера, включающая выбор необходимых параметров для проектирования, расчет и моделирование механических передач, входящих в проектируемое изделие. Данные факторы позволят использовать возможности современных САПР при проектировании изделий соответствующего типа, что обеспечит сокращение времени на подготовку производства, а следовательно, повысит экономическую эффективность работы.
Система автоматизированного проектирования, привод конвейера, трехмерная модель, механическая передача, компас-3d
Короткий адрес: https://sciup.org/14720245
IDR: 14720245 | УДК: 62-8:621.867:004.9 | DOI: 10.15507/0236-2910.027.201701.077-092
Conveyor drive design in Compas 3D system
Introduction. Engineers often face problems associated with design and technological preparation of production and with improving the technical documentation quality. These problems can be solved using CAD/CAE/CALS-technology in industrial production. Design engineering products is related to modeling parts and assemblies in 3D CAD graphics, followed by engineering analysis. The authors demonstrate the sequence of the conveyor drive design using COMPAS application libraries. Materials and Methods. А conveyor drive mechanical transmission was calculated and simulated using COMPAS application libraries. Design calculation and construction of COMPAS 3D model are present in the article. Results. The authors proposed their method of the conveyor drive design using COMPAS 3D libraries. Discussion and Conclusions. The method of a 3D conveyor drive model design with the choice of the necessary parameters for design, calculation and simulation of mechanical transmissions as a part of the projected product was developed. The proposed technique allows using the capabilities of modern CAD software for product design related things ensuring time reduction for preparation of production, and promoting economic efficiency.
Текст научной статьи Проектирование привода конвейера в системе Компас-3D
Комплексное внедрение CAD/CAM/ CAE-технологий в процесс конструкторско-технологической подготовки производства и их развитие – в настоящее время не преимущество, а необходимость. При использовании САПР в машиностроении сокращаются сроки конструкторско-технологической подготовки производства, существенно повышается качество конструкторской и технологической документации, уменьшаются издержки или совсем исключается опытное производство изделий.
В Рузаевском институте машиностроения ФГБОУ ВО «МГУ им. Н.П. Огарёва» развернут информационно-технологический комплекс, оснащенный современным программным обеспечением для инженерных расчетов (T-flex, КОМПАС, SolidWorks, Siemens PLM) [1].
Считаем необходимым использование 3D-технологий и прикладных инструментальных средств проектирования, расчета и инженерного анализа, в частности, в среде КОМПАС, при конструкторско-технологической подготовке производства.
Целью исследования является разработка методики создания трехмерной модели привода конвейера с помощью системы прочностных расчетов и прикладных библиотек в среде КОМПАС.
Обзор литературы
В состав развитых машиностроительных САПР входят CAD-, САМи САЕ-системы. Функции CAD-систем (Computer-Aided Design) в машиностроении подразделяют на функции двумерного и трехмерного проектирования. К функциям 2D относят черчение, оформление конструкторской документации; к функциям 3D – получение трехмерных геометрических моделей, метрические расчеты, реалистичную визуализацию, взаимное преобразование 2D- и 3D-моделей. В ряде систем предусмотрено также выполнение процедур, называемых процедурами позиционирования: компоновка и размещение оборудования, проведение соединительных трасс и др.
Проектирование технологических процессов составляет часть технологической подготовки производства и выполняется в САМ-системах (Computer-Aided Manufacturing). Основные функции САМ-систем: разработка технологических процессов, синтез управляющих программ для технологического оборудования с ЧПУ, моделирование процессов обработки, в том числе построение траекторий относительного движения инструмента и заготовки в процессе обработки, генерация постпроцессоров для конкретных типов оборудования с ЧПУ, расчет норм времени обработки.
Функции САЕ-систем (Computer-Aided Engineering) довольно разнообразны, поскольку связаны с проектными процедурами анализа, моделирования, оптимизации проектных решений. В состав машиностроительных САЕ-систем включают программы для выполнения моделирования полей физических величин, в том числе анализ прочности, расчета состояний моделируемых объектов и имитационного моделирования сложных производственных систем.
В работе [2] освещен опыт использования возможностей системы SolidWorks Motion при исследовании рычажных механизмов. Результатом расчетов в SolidWorks Motion при выполнении кинематического и силового анализа рычажного механизма являются графики кинематических характеристик для основных точек и звеньев механизма, а также динамическая визуализация схемы механизма. В исследовании [3] представлен опыт совместного применения в техническом университете КОМПАС-3D и системы управления электронным архивом конструкторской документации ЛОЦМАН:КБ при изучении дисциплины САПР.
В работе [4] описан подход к моделированию и анализу элементов механических передач в среде SolidWorks на базе API. В [5] проводится расчет прочности шестеренного насоса, реализуемого системой SolidWorks Simulation. Прочностные расчеты в приведенных примерах основаны на численных методах решения задач механики, в частности, методе конечных элементов. В [6] рассмотрены принципы работы библиотеки параметрических моделей зуборезных долбяков в системе КОМПАС. В [7–9] освещены основные вопросы автоматизации проектирования, расчета и оформления конструкторской и технологической документации (чертежей и 3D-моде-лей) осевого режущего инструмента и червячных зуборезных фрез средствами системы КОМПАС.
Материалы и методы
Рассмотрим последовательность проектирования привода конвейера с использованием библиотек КОМПАС-3D. Этапы проектирования привода конвейера выполняются согласно методике, изложенной в работах [10–11].
Первый этап – выбор электродвигателя, исходными параметрами для которого являются мощность и количество оборотов. Двигатель выбирается из прикладной библиотеки КОМПАС «Библиотека электродвигателей». Данная библиотека позволяет создавать двумерный чертеж всех основных видов двигателя. Диалоговое окно библиотеки представлено на рис. 1.
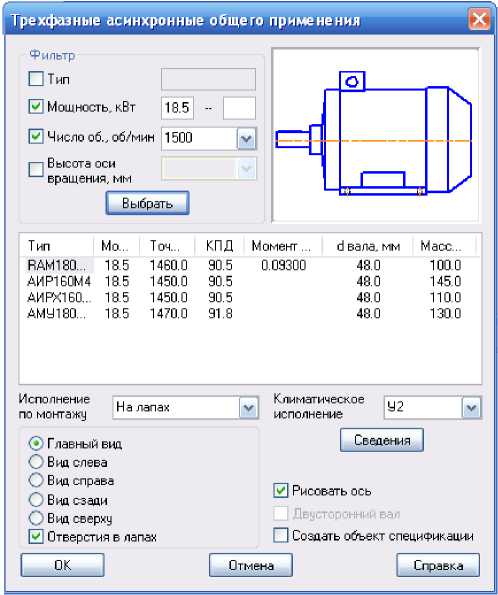
Р и с. 1. Диалоговое окно прикладной «Библиотеки электродвигателей»
F i g. 1. Dialog box of the application Library of Electronic Motors
Второй этап – расчет и моделирование клиноременной передачи. Исходными данными для проектирования являются следующие параметры:
– предварительное передаточное отношение передачи;
– предварительное межосевое расстояние, мм;
– предварительная мощность, кВт;
– частота вращения ведущего шкива, об/мин;
– количество ремней.
С помощью комплекса GEARS произведем расчет параметров для проектирования клиноременной передачи [Там же]. Сначала выполняется проектный расчет. Для этого выберем вкладку с одноименным названием (рис. 2).
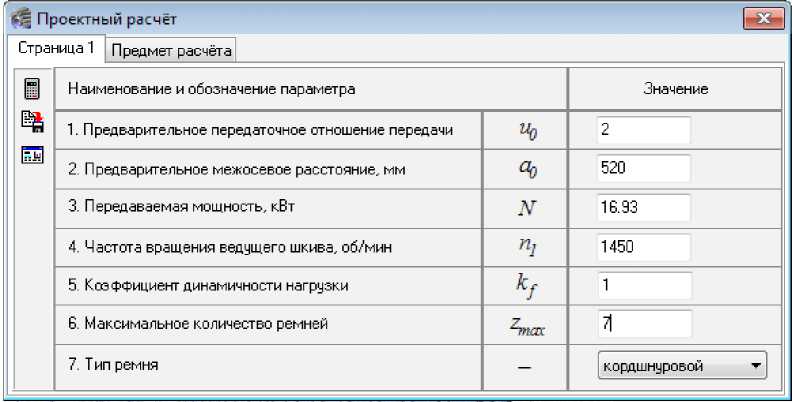
Р и с. 2. Диалоговое окно для проведения проектного расчета клиноременной передачи F i g. 2. Dialog box for belt transmission design calculation
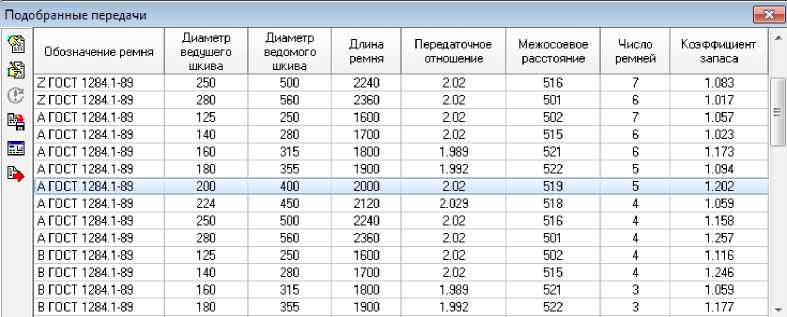
Р и с. 3. Подобранные передачи
F i g. 3. Selected transmission
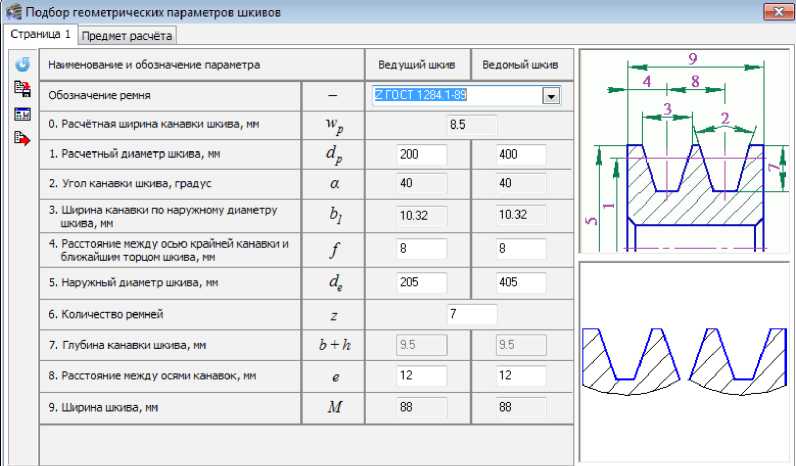
Р и с. 4. Подбор геометрических параметров шкивов
F i g. 4. The pulleys geometric parameters selection
Р и с. 5. Диалоговые окна программы GEARS
F i g. 5. GEARS program dialog boxes
На рис. 3 представлены расчетные подобранные передачи.
После этого происходит подбор геометрических параметров шкивов. На рис. 4 представлено окно с полученными параметрами ведущего и ведомого шкива.
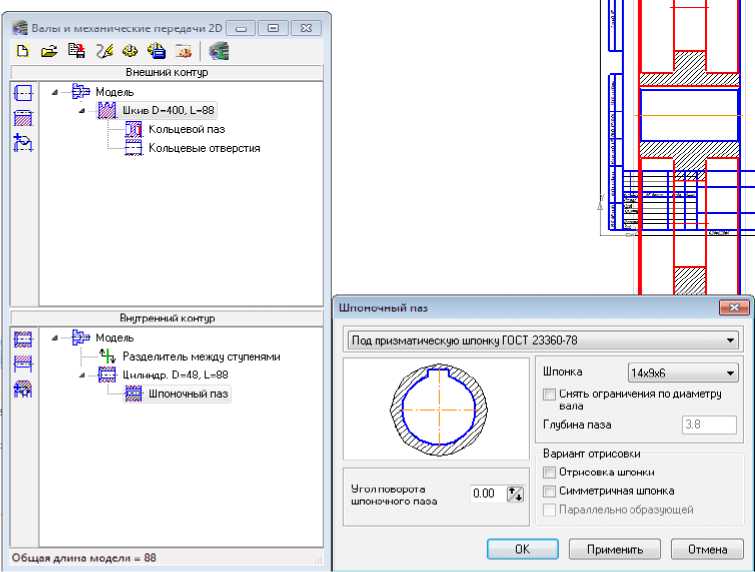
Третий этап – построение твердотельной трехмерной модели шкивов с помощью прикладной библиотеки «КОМПАС SHAFT-2D». Для этого войдем во вкладку «Валы и механические передачи 2D» и создадим двухмерный чертеж. Укажем, что создаем первую ступень и выберем шкив. Внесем параметры рассчитанного шкива. Во вкладке
«Дополнительные построения» укажем кольцевой паз и все требуемые размеры, а также кольцевые отверстия, их диаметры и местоположение. В центре выполним отверстие и шпоночный паз по ГОСТ 233608-78. Чертеж шкива генерируется автоматически. Построение модели шкива происходит после нажатия кнопки «Дополнительные построения» и выбора вкладки «Генерация твердотельной модели». Диалоговые окна программы представлены на рис. 5.
Модель шкива показана на рис. 6. Аналогичные операции проводим с ведущим шкивом.
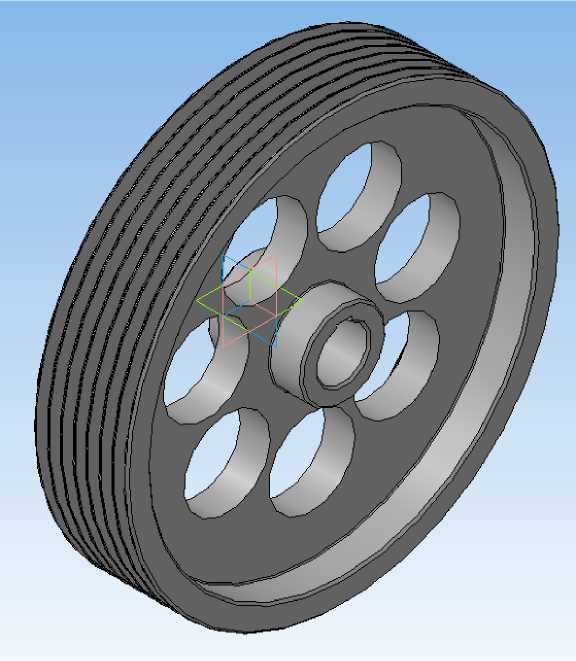
Р и с. 6. Модель ведомого шкива
F i g. 6. The model of the driven pulley
После этого уточняем подобранную передачу с помощью этой же библиотеки. Проверочный расчет выполняется аналогичным образом.
Четвертый этап – моделирование червячной передачи при помощи прикладной библиотеки «КОМПАС SHAFT-2D». Для выполнения данной операции создаем новый чертеж и запускаем библиотеку. Выбираем геометрический расчет по межосевому расстоянию (рис. 7).
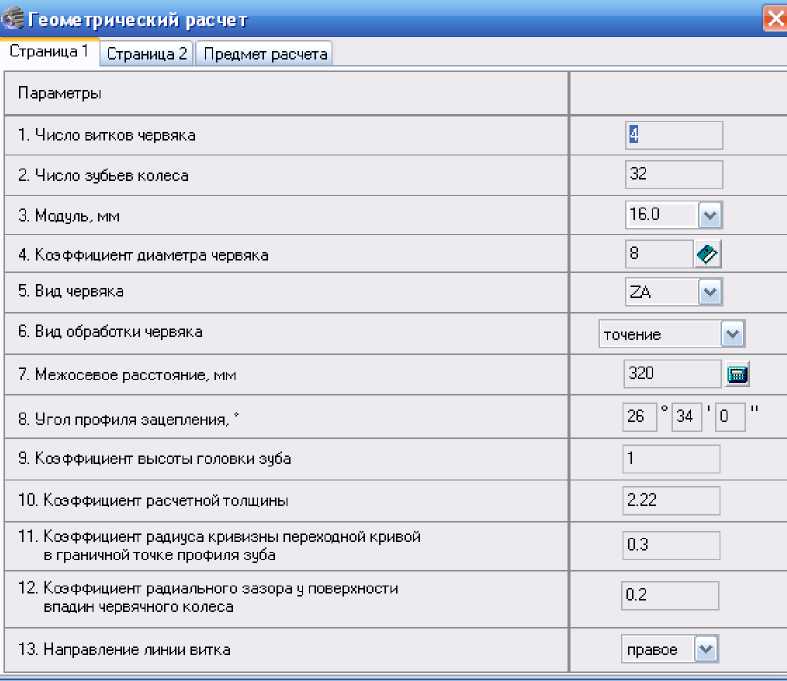
Р и с. 7. Диалоговое окно программы «КОМПАС SHAFT-2D»
F i g. 7. The COMPAS SHAFT-2D dialog program box
Вносим исходные данные (число витков, число зубьев, модуль и т. д.), рассчитанные согласно [Там же] и формируем результаты расчета. Следующий расчет на прочность выполняется аналогичным образом. В результате проектирования и построения чертежа библиотека предусматривает постро- ение твердотельной модели: следует указать способ отрисовки – и модель сгенерируется автоматически. Библиотека выполняет расчет одновременно для червяка и червячного колеса, но моделирование деталей зацепления происходит поэтапно. Сначала по расчетам строится червяк и его модель (рис. 8).

Р и с. 8. Твердотельная трехмерная модель червяка
F i g. 8. Solid-state three-dimensional model of the worm
Далее производится расчет червячного зацепления с помощью комплекса программ GEARS. Для этого используем геометрический расчет по межосевому расстоянию. Создаем новый чертеж и запускаем библиотеку. Строится двумерный чертеж венца червячного колеса с возможностью последующей генерации в твердотельную модель червячного колеса (рис. 9). Данный расчет производится одновременно с расчетом червяка и полностью аналогичен ему.

Р и с. 9. Модель червячного колеса в сборе
F i g. 9. Model of assembled worm gear
Расчет и выбор подшипников качения производится аналитически согласно [Там же] и с помощью GEARS, а твердотельные модели строятся по рассчитанным значениям с помощью библиотеки «Подшипники-3D» (рис. 10).
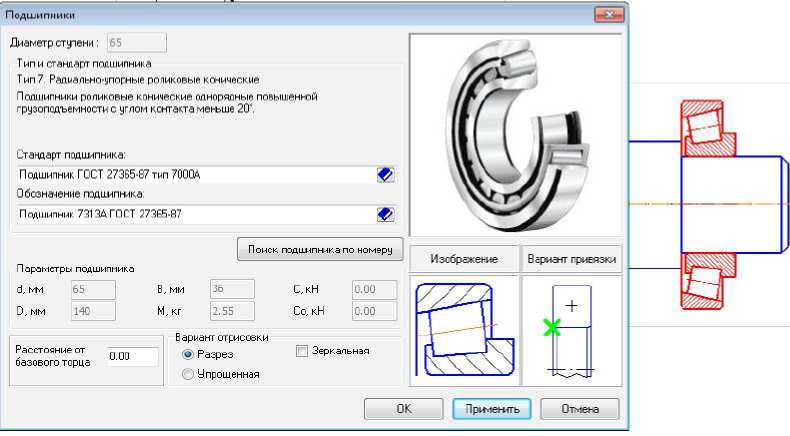
Р и с. 10. Диалоговое окно программы выбора подшипников
F i g. 10. Bearing selection program dialog box
С помощью комплекса GEARS также можно произвести расчет на прочность и теплостойкость редуктора.
Вносим исходные данные; формируем результаты расчета (рис. 11). На рис. 12 представлено окно расчета.
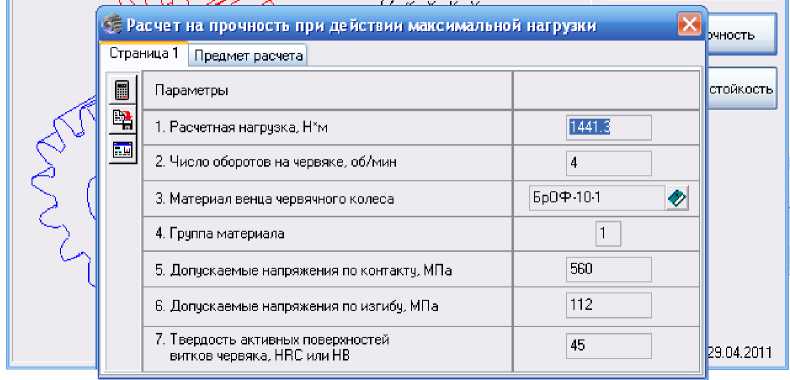
Р и с. 11. Расчет на прочность
F i g. 11. Strength analysis
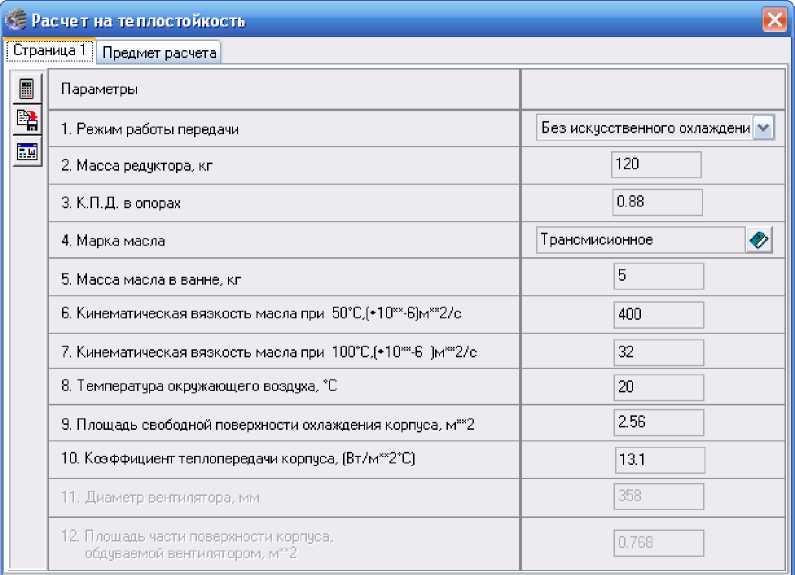
Р и с. 12. Расчет на теплостойкость
F i g. 12. Thermal resistance calculation
Моделирование редуктора произведем с помощью библиотеки «Ре-дуктор-3D», предназначенной для проектного расчета и построения в КОМПАС-3D трехмерной модели одноступенчатых редукторов общего назначения трех видов: конического, цилиндрического или червячного. Запускаем библиотеку, выбираем тип «Червячный редуктор» (рис. 13).
Вводим исходные данные. Программа корректирует расчетные значения, и если они нас не удовлетворяют, появляется диалоговое окно с коррек- тировкой параметров по расчету. После чего предлагается выбрать необходимые разрезы и сечения. Далее происходит построение деталей редуктора и его сборка. На рис. 14 представлена трехмерная модель редуктора в разрезе.
Пятый этап – сборка привода в системе КОМПАС-3D. Добавляем в сборку ранее спроектированные модели редуктора, электродвигателя, клиноременной передачи, детали «Рама» и «Рама двигателя». На рис. 15 представлена трехмерная модель привода конвейера.
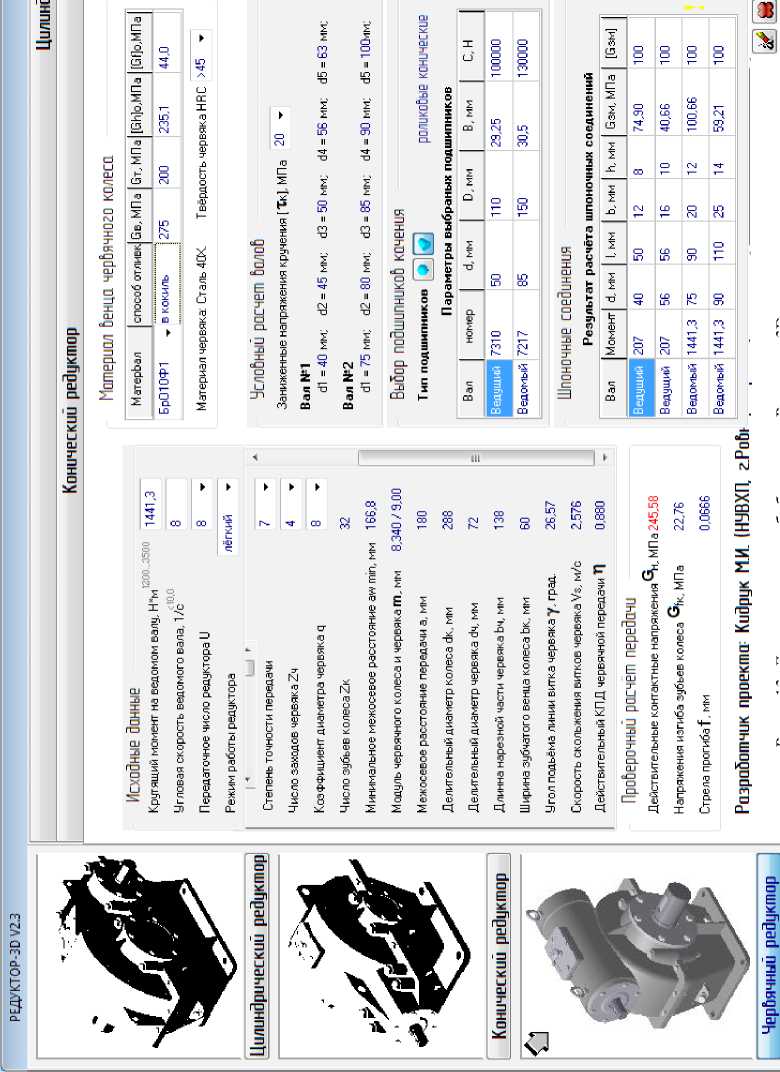
Р и с. 13. Диалоговое окно библиотеки «Редуктор-3D» F i g. 13. “Reducer-3D” Library window
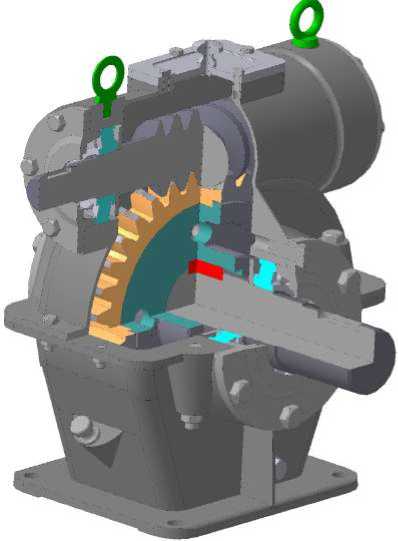
Р и с. 14. Редуктор червячный
F i g. 14. Worm reducer
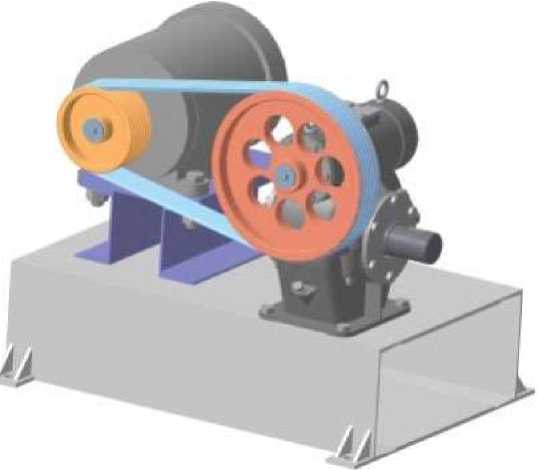
Р и с. 15. Привод конвейера
F i g. 15. Conveyor drive
По сборочной модели привода можно выполнить чертеж общего вида привода с помощью команды «ассоциативные виды». Спецификация формируется автоматически.
Результаты исследования
В ходе исследования была разработана последовательность проектирования привода конвейера с помощью прикладных библиотек КОМПАС-3D. В статье представлены возможности проектного и проверочного расчетов разработанных трехмерных моделей деталей, входящих в проектируемое изделие, моделирование механических передач. Выполнение данных операций обеспечивает многократное использование разработанной конструкторской документации для изделий соответствующего типа, а следовательно, сокращение времени на подготовку производства.
Обсуждение и заключения
Таким образом, была разработана методика создания трехмерной модели привода конвейера, включающая выбор необходимых параметров для проектирования, расчет и моделирование механических передач для проектируемого изделия. Данная методика может быть применима при проектировании изделий машиностроения, выполнения производственного проектирования деталей машин и выполнении выпускных квалифицированных работ технического профиля. Использование современных графических САПР при проектировании машиностроительных изделий позволяет сократить сроки конструкторско-технологической подготовки производства, повысить качество разрабатываемой технической документации.
Поступила 22.11.2016; принята к публикации 13.01.2017; опубликована онлайн 31.03.2017
Все авторы прочитали и одобрили окончательный вариант рукописи.
Список литературы Проектирование привода конвейера в системе Компас-3D
- Кечемайкин В. Н., Майкова С. Э., Масленникова Л. В., Родиошкина Ю. Г. Особенности организации подготовки студентов инженерных специальностей в современных условиях развития машиностроения//Вестник Мордовского университета. 2015. № 1. С. 44-51. URL: http://elibrary.ru/item.asp?id=23338429
- Родиошкина Ю. Г. Кинематический анализ рычажного механизма в среде SolidWorks//SWorld: сб. науч. тр. 2014. Т. 7, № 1. С. 40-12. URL: http://elibrary.ru/item.asp?id=21349554
- Исаев А., Федорова Д. Изучение дисциплины САПР на основе программных продуктов АСКОН//САПР и графика. 2015. № 12 (230). С. 78-80. URL: http://elibrary.ru/item.asp?id=25732981
- Чугунов М. В., Щёкин А. В. Моделирование и анализ элементов механических передач в среде SolidWorks на базе API//Вестник Мордовского университета. 2014. № 1. С. 148-153. URL: http://elibrary.ru/item.asp?id=21474954
- Душин И. Ф., Маскайкина С. Е., Полуешина Н. И., Ваваева Н. Г. Прочностной расчет корпуса шестеренного насоса с использованием SolidWorks Simulation//Вестник Мордовского университета. 2014. № 1. С. 154-160. URL: http://elibrary.ru/item.asp?id=21474955
- Щёкин А. В., Митин Э. В., Сульдин С. П. Описание структуры библиотек параметрических моделей зуборезных долбяков в системе КОМПАС//СТИН. 2014. № 4. С. 6-9. URL: http://elibrary.ru/item.asp?id=21836470
- Сульдин С. П., Митин Э. В., Щёкин А. В. Автоматизация проектирования технологической документации с использованием системы КОМПАС//Вестник машиностроения. 2013. № 7. С. 80-83. URL: http://elibrary.ru/item.asp?id=20737002
- Щёкин А. В., Митин Э. В., Сульдин С. П. Автоматизация проектирования спиральных сверл в системе КОМПАС//САПР и графика. 2013. № 1 (195). С. 90-94. URL: http://elibrary.ru/item. asp?id=21307461
- Щёкин А. В., Митин Э. В., Сульдин С. П. Автоматизация проектирования червячных зуборезных фрез в системе КОМПАС//САПР и графика. 2011. № 12 (182). С. 101-104. URL: http://elibrary.ru/item.asp?id=21307379
- Дунаев П. Ф., Леликов О. П. Детали машин: курсовое проектирование: учеб. пособие; доп. Мин. обр-я РФ. 5-е изд., доп. М.: Машиностроение. 2004. 560 с., ил. URL: http://lib-bkm.ru/12875
- Шейнблит А. Е. Курсовое проектирование деталей машин. 2-е изд., перераб. и доп. Калининград: Янтарный Сказ. 2002. 454 с. URL: http://lib-bkm.ru/12743
