Проектирование системы автоматического управления электродвигателем постоянного тока

Автор: Максаков С.А.
Журнал: Теория и практика современной науки @modern-j
Статья в выпуске: 12-1 (18), 2016 года.
Бесплатный доступ
Статья посвящена проектированию САУ параметрами электродвигателя постоянного тока на основе результатов имитационного моделирования в среде динамического программирования VisSim. Приведен расчет параметров рабочей точки системы. Определены параметров ПИ-регулятора, Проведена оптимизация САУ по интегральному критерию качества
График переходного процесса, пи-регулятор, оптимизация, интегральный критерий качества имитационная модель
Короткий адрес: https://sciup.org/140267851
IDR: 140267851
Текст научной статьи Проектирование системы автоматического управления электродвигателем постоянного тока
Объектом управления является электродвигатель постоянного тока широко применяемый в автоматизированных системах управления в качестве исполнительного механизма.
Проектирование САУ проведено на основе результатов имитационного моделирования в среде динамического программирования VisSim .
-
1. Вначале получим график переходного процесса объекта без САУ при подаче на его вход ступенчатого воздействия равного 210/8 = 26,25. На осциллограмме рисунка 1 видно, что выходная переменная (угловая скорость вращения вала электродвигателя) достигает установившегося равновесного значения 210с-1 за 8 секунд
Рис. 1 - График переходного процесса электродвигателя без системы управления
Значение сигнала задатчика найдем из выражения 210*0,005=1.05.
Таким образом, рабочая точка системы определяется значениями величин:
-
- выходной параметр объекта имеет значение 210 с-1;
-
- сигнал задатчика имеет значение 1,05В;
-
- входная переменная для двигателя без САУ имеет значение 26,25В.
-
2. Определение параметров ПИ-регулятора. Анализ переходного процесса
На рисунке 2 приведена алгоритмическая схема системы автоматического управления электродвигателем постоянного тока на базе ПИ-регулятора.
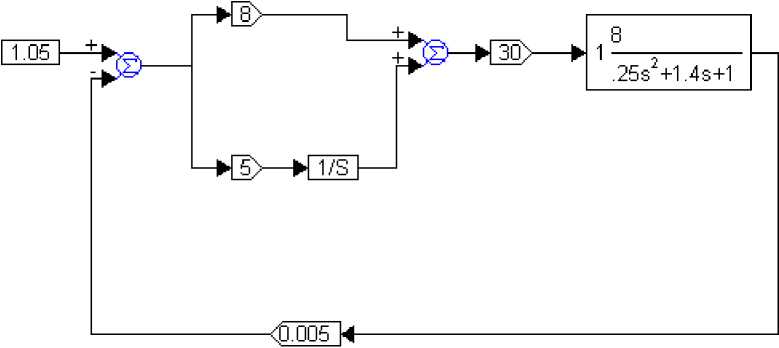
Рис. 2 - Алгоритмическая схема системы автоматического управления
Подбор параметров К 1 и К 2 ПИ-регуляторов проведем сканированием, используя интегральный критерия качества - интеграл модуля ошибки (ИМО).
На рисунке 3 показаны графики переходных процессов при различных значениях К 1 и К 2 :
Таблица 1
|
К 1 |
2 |
1 |
20 |
|
К 2 |
2 |
2 |
5 |
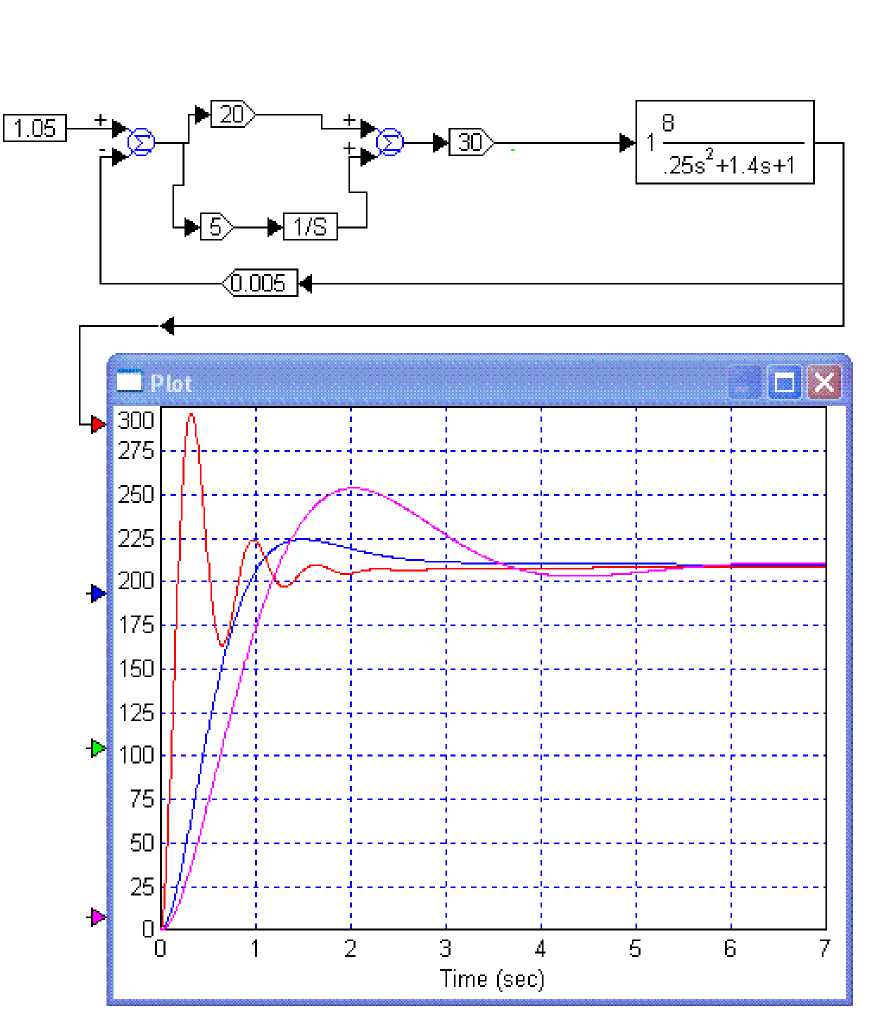
Рис.3 - Графики переходных процессов САУ при различных значениях параметров настроек ПИ- регулятора
3.Оптимизация САУ по интегральному критерию качества
Для оптимизации САУ также используем интегральный критерий качества – интеграл модуля ошибки (ИМО). При оптимальных значениях К 1 и К 2 ПИ-регулятора значение ИМО минимально. На рисунке 4 представлена система автоматического управления объектом и интегральный критерий качества, смоделированный в виде отдельных блоков. Значение интеграла выводится на цифровой индикатор и одновременно на осциллограф.
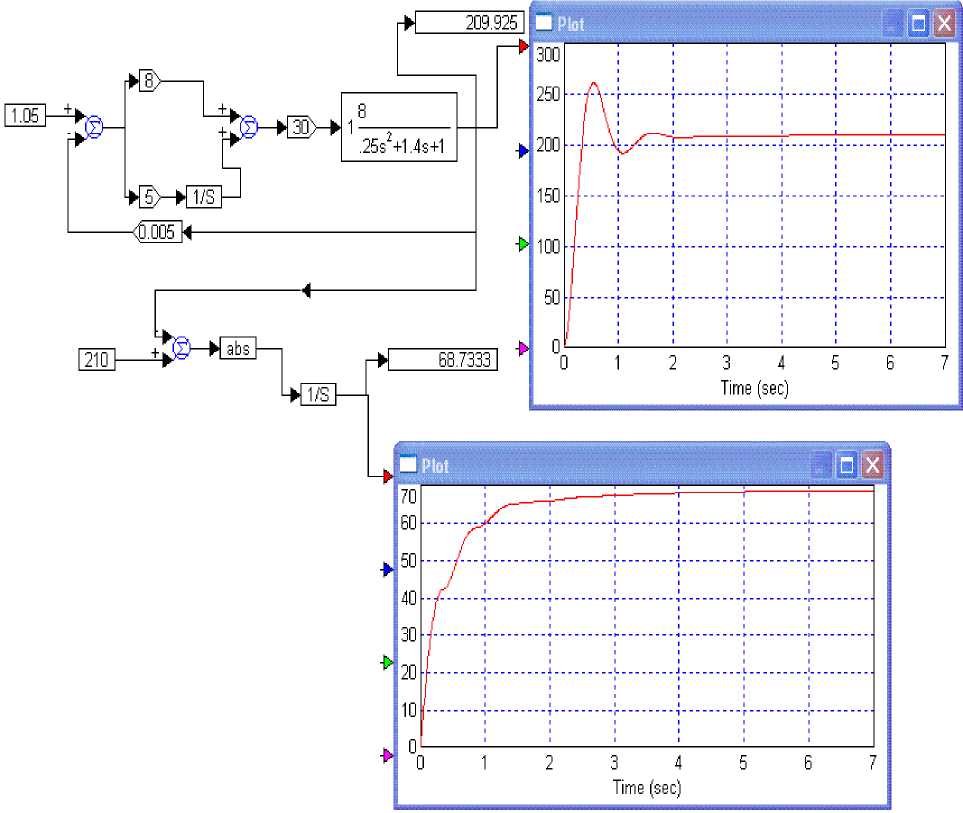
Рис. 4 - Применение интегрального критерия качества ИМО для оптимизации САУ
На рисунке 5 представлен график переходного процесса САУ при оптимальных значениях К и К2 ПИ-регулятора. К1=8, К2=5.
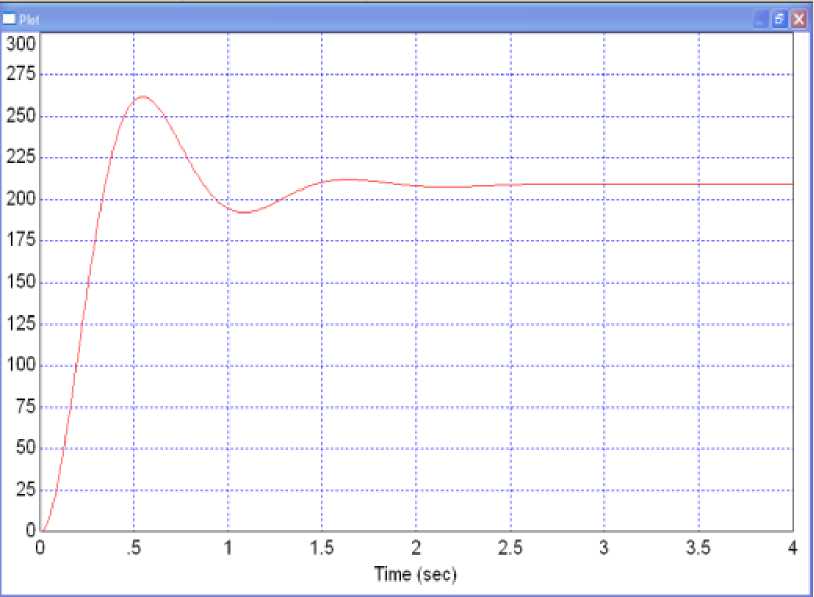
Рис. 5- График переходного процесса САУ при оптимальных значениях К 1 и К 2
Анализируя график переходного процесса САУ, определяем качество системы управления.
Выходная переменная достигает заданного значения 210с-1 за время
-
1,5 секунды.
Погрешность регулирования - 0,5%.
Перерегулирование - (260-210)/210*100%=23%.
График переходного процесса показывает, что система устойчивая.
В устойчивости разработанной системы управления убедимся с помощью частотного метода Найквиста (рисунок 6)
График годографа Найквиста не охватывает точку на координатной комплексной плоскости с координатами (-1;0), что свидетельствует об устойчивости разработанной САУ.
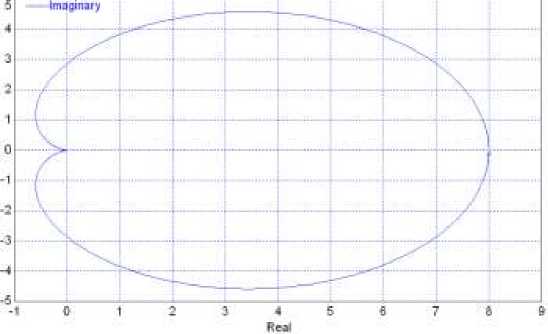
Рис. 6 - Годограф Найквиста
Таким образом, результаты полученных данных показывают, что параметры спроектированной системы автоматического управления электродвигателем постоянного тока соответствуют техническому заданию.
Предлагаемый подход проведения проектных решений может использоваться в практике разработки автоматизированных систем управления, а также в образовательном процессе.
Список литературы Проектирование системы автоматического управления электродвигателем постоянного тока
- В. Г. Корольков, В.К. Грыжов, А.Д. Акшинский, Имитационная модель системы управления процессом дозирования компонентов комбикорма.//Новосибирск: Материалы XVI международной научно- практической конференции. Сборник научных трудов, № 3, 2014 г.
- Корольков В.Г., Грыжов В.К., Грыжов Е.В. Гибкий преобразователь аналогового сигнала в дискретный цифровой на примере вольтметра следящего уравновешивания // Москва: Автоматизация в промышленности. 2013, № 7.
- Грыжов В.К., Корольков В.Г., Грыжов Е.В., Акшинский А.Д. Гибкий преобразователь аналогового сигнала в дискретный цифровой на примере вольтметра двойного интегрирования // Москва: Автоматизация в промышленности. 2012, № 8.
- Грыжов В.К., Корольков В.Г., Грыжов Е.В., Акшинский А.Д. Гибкий преобразователь аналогового сигнала в дискретный цифровой на примере вольтметра двойного интегрирования // Москва: Автоматизация в промышленности. 2012, № 8.
- Gryzhov V.K., Korol'Kov V.G. Signal converter model for hybrid control system design in vissim environment. // Москва: Автоматизация в промышленности. 2010. С. 17.
- Грыжов В.К., Корольков В.Г. Модель преобразователя для проектирования гибридных систем управления в среде VisSim // Москва: Автоматизация в промышленности. 2010. № 7.
