Проектирование, создание и развитие системы управления движением и навигации Российского сегмента Международной космической станции

Автор: Платонов В.Н., Богачев А.В., Борисенко А.Я., Прутько А.А.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (44), 2024 года.
Бесплатный доступ
Рассматриваются принципы построения системы управления движением и навигации (СУДН) Международной космической станции (МКС), состоящей из двух систем: российской и американской. Приводятся задачи, решаемые каждой из СУДН, общая схема СУДН МКС, обмен данными и командами между СУДН российского сегмента и СУДН американского сегмента. На примерах управления ориентацией МКС с использованием реактивных двигателей и разгрузки накопленного кинетического момента американских силовых гироскопов рассмотрена модификация алгоритмов управления угловым движением в процессе полёта МКС.
Система управления движением и навигации, бесплатформенные инерциальные навигационные системы, система координат, оптимальный разворот, разгрузка силовых гироскопов
Короткий адрес: https://sciup.org/143182570
IDR: 143182570 | УДК: 629.786.2.051
Design, development and evolution of the guidance, navigation and control system for the Russian segment of the International Space Station
The paper discusses design concepts for Guidance, Navigation and Control (GNC) system for the International Space Station (ISS), which consists of two systems: one Russian and one American. The paper describes the tasks addressed by each of the GNC systems, the overall architecture of the ISS GNC system, exchange of data and commands between the Russian Segment GNC system and the US Orbital Segment GNC system. Through the example of the ISS attitude control using jet propulsion and desaturation of the angular momentum accumulated in US Control Moment Gyroscopes the paper reviews modification of the angular motion control algorithms in the course of the ISS mission.
Текст научной статьи Проектирование, создание и развитие системы управления движением и навигации Российского сегмента Международной космической станции
Система управления движением и навигации (СУДН) Международной космической станции (МКС) состоит из двух частей: СУДН российского сегмента (РС) и СУДН американского сегмента (АС). СУДН РС и СУДН АС тесно взаимодействуют друг с другом и, по сути, представляют собой единую интегрированную СУДН МКС.
Проектирование и разработка СУДН МКС проводилась совместно российскими и американскими специалистами в 1994–2000 гг. [1]. В процессе проектирования учёными двух различных научных школ были согласованы используемые системы координат; единицы измерений; используемые кинематические параметры; модель атмосферы Земли; способы расчёта аэродинамических характеристик; типы ориентаций, необходимые для обеспечения функционирования служебных систем РС и АС; точностные характеристики управления движением и навигацией; методы анализа динамических процессов; динамическая модель МКС; методы верификации и т. п. Особое место отводилось согласованию интерфейсов бортового программного обеспечения, моделей движения, используемых на наземных стендах, отработке программного обеспечения СУДН МКС на стендах в Москве и Хьюстоне (США).
Каждая СУДН (РС и АС) имеет наборы приборов для определения ориентации и навигации. СУДН РС содержит реактивные двигатели для управления движением центра масс и вокруг центра масс. При этом для управления вокруг оси крена предполагалось использовать блок выносных двигателей ориентации, установленный на научноэнергетической платформе. Американский сегмент МКС имеет только инерционные исполнительные органы (ИИО) — систему из четырёх трёхстепенных силовых гироскопов CMG (Control Moment Gyroscope). Разгрузка накопленного кинетического момента CMG осуществляется с использованием двигателей ориентации (ДО) РС. Первоначально предполагалось, что СУДН РС также будет иметь систему ИИО. По предварительным оценкам, для обеспечения дежурных режимов ориентации при максимальном индексе солнечной активности (и, соответственно, максимальном аэродинамическом моменте) область ва- риации кинетического момента системы ИИО должна иметь форму шара радиусом 20 000 Н ∙ м ∙ с. Такую область можно было реализовать с использованием шести гиродинов «Кентавр-2М» (разработка НИИКП, г. Санкт-Петербург)
с номинальным кинетическим моментом 2 500 Н ∙ м ∙с. Предполагалось доработать данные гиродины для использования с номинальным кинетическим моментом 4000 Н∙м∙с в течение 15% ресурса (за счёт увеличения скорости вращения ротора в периоды высокой солнечной активности). Управление ориентацией с использованием гиродинов реализовано не было.
Основные функции, реализуемые СУДН РС МКС:
-
• выполнение ориентации, стабили-
- зации и разворотов станции с помощью реактивных двигателей ориентации служебного модуля (СМ) и пристыкованных кораблей и модулей;
-
• выполнение манёвров формирования и поддержания орбиты МКС с использованием реактивных двигателей станции, кораблей и модулей;
-
• выполнение «разгрузки» кинетического момента, накопленного силовыми гироскопами CMG американского сегмента;
-
• автономное определение орбиты станции (навигационного вектора состояния) и ориентации станции на любой фазе полёта;
-
• обеспечение транспортных операций для транспортных кораблей «Союз», транспортных грузовых кораблей «Прогресс», европейского транспортного корабля ATV , Space Shuttle и других кораблей АС;
-
• обеспечение отказоустойчивого функционирования системы с выполнением требований по безопасности, соответствующих пилотируемому космическому полёту.
Задачи, решаемые российской и американской системами управления движением МКС
Задачи, решаемые СУДН РС:
-
• определение ориентации и угловой скорости;
-
• определение вектора состояния;
-
• управление ориентацией с использованием двигателей;
-
• проведение коррекций орбиты, включая манёвр увода от микрометеоритов и космического мусора;
-
• управление наведением солнечных батарей и средств связи;
-
• выполнение разгрузки американских силовых гироскопов;
-
• обеспечение режимов стыковок с российскими кораблями, Space Shuttle , ATV ;
-
• передача управления СУДН АС в нештатных ситуациях;
-
• передача данных по ориентации, угловой скорости, вектору состояния в СУДН АС.
Задачи, решаемые СУДН АС:
-
• управление ориентацией с использованием силовых гироскопов и, на ранних стадиях полёта МКС, по данным ориентации, предоставляемым СУДН РС;
-
• определение ориентации, угловой скорости, вектора состояния;
-
• обеспечение режима стыковки с Space Shuttle и другими кораблями АС;
-
• поддержание равновесной ориентации, обеспечивающей требования по микрогравитации;
-
• управление наведением антенн, солнечных батарей радиаторов;
-
• передача управления СУДН РС в нештатных ситуациях;
-
• передача данных по ориентации, угловой скорости, вектору состояния в СУДН РС.
Основные принципы организации СУДН
СУДН РС и СУДН АС построены на принципах бесплатформенных инерциальных навигационных систем (БИНС) с использованием формализма кватернионов. В них применяются одинаковые физические системы координат:
-
• орбитальная ОСК;
-
• равновесная РОСК;
-
• инерциальная J 2000;
-
• равновесно-солнечная РСО.
Под режимом равновесной ориентации понимается такая ориентация, при которой средний за виток суммарный момент возмущающих сил (гравитационных, аэродинамических и гироскопических) равен нулю. Практически, с учётом ограничений, выставляемых АС, режим РОСК близок к режиму ОСК с допустимыми разворотами по каждой из осей ±15 ° .
Взаимодействие СУДН РС и СУДН АС строится по принципу «ведущий – ведомый» ( Master – Slave ). В каждый момент времени управление движением выполняет одна из двух систем (СУДН РС или СУДН АС) — «ведущая» ( Master ). Другая система управления (СУДН АС или СУДН РС соответственно) — «ведомая» ( Slave ), подчиняется «ведущей»
и оказывает ей поддержку данными и исполнительными органами.
Уровни обеспечения надёжности при выполнении режимов СУДН:
-
• приборный : автоматический перебор внутренних резервов СУДН по датчиковой аппаратуре и исполнительным органам;
-
• функциональный : автоматическое изменение средств (способа и состава датчиков), реализующих заданный режим;
-
• системный : автоматическая передача управления другой СУДН при невозможности выполнения режима.
Параллельное решение задач позволяет осуществить обмен данными между двумя системами, что также значительно повышает надёжность решения каждой задачи. На рис. 1 представлена схема решения вычислительных задач ориентации и навигации на основе инерциальной системы в каждом сегменте (российском и американском).


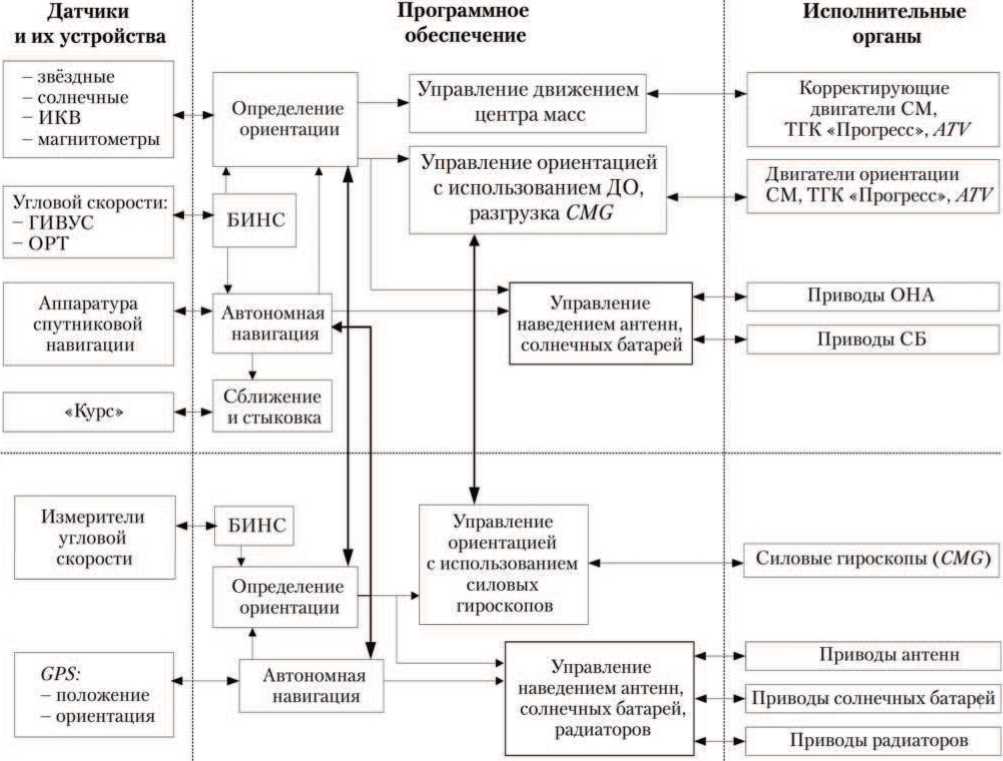
Рис. 1. Схема интегрированной системы управления движением МКС: ИКВ — инфракрасная вертикаль; ГИВУС — гироскопический измеритель вектора угловой скорости; ОРТ — ортогональный измеритель вектора угловой скорости; «Курс» — радиотехническая система сближения; БИНС — бесплатформенная инерциальная навигационная система; ДО — двигатели ориентации; CMG — control moment gyroscope; СМ — служебный модуль; ТГК — транспортный грузовой корабль; ATV — the automated transfer vehicle; ОНА — остронаправленная антенна; СБ — солнечная батарея (рисунок создан авторами)
Различная приборная реализация БИНС, состава датчиков первичной информации, компьютерных систем СУДН и программного обеспечения позволили получить резервирование СУДН на системном уровне. На рис. 2 показана схема обмена данными между российской и американской системами. Видно, что наличие дополнительной первичной информации делает каждую систему существенно более устойчивой к отказам приборов и датчиков первичной информации.
Совместная работа двух систем обеспечивается структурой бортовых компьютерных систем станции. В каждый момент времени активной является одна из СУДН (АС или РС). Рассмотрим типичные варианты взаимодействия СУДН РС и СУДН АС.
Когда ориентацией МКС управляет РС, СУДН РС («ведущий») находится в режиме управления с использованием ДО (Thruster only), а СУДН АС находится в индикаторном режиме (Free drift). При этом кинетический момент американских CMG поддерживается неизменным в инерциальной системе координат. В этом случае CMG не создают возмущающих моментов, действующих на МКС.
Передача управления ориентацией от СУДН РС к СУДН АС осуществляется в два этапа. Сначала в СУДН РС (из Центра управления полётами или от экипажа) посылается команда подготовки СУДН РС к режиму разгрузки CMG ( CMG Thruster Assist ). После получения от СУДН РС статуса готовности к режиму разгрузки CMG , СУДН АС посылает команду на переход в режим разгрузки, и после завершения перехода СУДН АС становится «ведущей».
Передача управления ориентацией от СУДН АС к СУДН РС осуществляется следующим образом. Американские специалисты выдают команды на поворот солнечных батарей и радиаторов АС в такие положения, в которых струи от реактивных двигателей РС не оказывают на них критического воздействия.

Положение и скорость движения центра масс МКС
Угловая скорость МКС
Угловое рассогласование между инерциальной и связанной системами координат МКС
Угловое рассогласование между орбитальной и связанной системами координат МКС
Вектор суммарного кинетического момента силовых гироскопов CMG
Команды передачи управления между СУДЫ
Команды, данные для проведения разгрузки CMG на РД PC
Статусы, данные о проведении разгрузки
Команды, статусы для изменения режимов работы СУДН
Массоинерционные характеристики МКС
Измерения акселерометров
Данные о перемещении грузов манипулятором PC

Рис. 2. Схема обмена данными между системами управления движением и навигации (СУДН) российского (РС) и американского (АС) сегментов МКС: РД — реактивные двигатели; CMG — control moment gyroscope (рисунок создан авторами)
Затем АС посылает в РС команду передачи управления RSTakeControlWithHandshake (российскому сегменту принять управление с проверкой условий) с двумя параметрами: в первом указывается система координат, в которой СУДН РС должна принять управление; во втором — в какой системе координат зафиксирован кинетический момент CMG . Далее СУДН РС подготавливается к работе в режиме активного управления, и после успешного завершения подготовки СУДН РС становится «ведущей».
Если произошел отказ СУДН АС при её активном управлении ориентацией МКС, то солнечные батареи и радиаторы АС поворачиваются в безопасное положение и в РС посылается команда на безусловное взятие управления RSTakeControl (российскому сегменту принять управление безусловно) с параметром, указывающим систему координат, в которой СУДН РС должна принять управление. СУДН РС подготавливается к работе в режиме активного управления, и после завершения подготовки СУДН РС становится «ведущей».
Управление ориентацией МКС с использованием реактивных двигателей Российского сегмента (режим Thruster only )
Расчёт кинематических параметров для управления ориентацией осуществляется с использованием БИНС. Коррекция БИНС осуществляется по данным автоматических датчиков ориентации и навигации.
Используются 32 двигателя ориентации СМ, объединённые в два коллектора по 16 ДО, тяга одного ДО 13,3 кГ. Кроме двигателей СМ на разных стадиях полёта используются двигатели причаливания и ориентации транспортных грузовых кораблей (ТГК) «Прогресс», пристыкованных к РС, с тягой одного двигателя 13,3 кГ. Во время полётов МКС с кораблями ATV использовались восемь двигателей ориентации ТГК ATV с тягой каждого двигателя 20 кГ.
Для управления вокруг оси крена плечо ДО СМ составляет всего 1,5 м. На начальных этапах полёта блок выносных двигателей ориентации не был реализован. Для управления по крену было принято решение использовать двигатели среднего пояса ТГК «Прогресс», пристыкованного к стыковочному отсеку (СО). ДО СМ использовались при отсутствии ТГК на СО. С 2021 года, после стыковки многоцелевого лабораторного модуля (МЛМ), основными исполнительными органами для управления по крену являются 12 двигателей модуля дополнительных двигателей по крену МЛМ с тягой одного двигателя 10 кГ.
Процесс формирования управляющего сигнала включает в себя следующие этапы:
-
• фильтрация угловых скоростей и угловых отклонений с использованием адаптивного самонастраивающегося полосового фильтра [2];
-
• расчёт требуемого момента ДО;
-
• фильтрация управляющего момента.
Фильтрация осуществляется путём задания задержек на включение ДО после его выключения. Типичные задержки составляли три секунды по каналу крена и по одной секунде — по каналам тангажа и рыскания.
Фильтр с задержками на повторные включения двигателей успешно работал с 2000 по 2011 г. Размеры станции увеличивались, соответственно, изменялись упругие характеристики. 23.02.2011 г. при выполнении разворота вокруг оси рыскания на 180 ° зафиксировано превышение допустимых нагрузок на некоторых модулях АС. Для уменьшения нагрузок при проведении динамических операций было запрещено использование ДО ТГК, пристыкованного к СО.
Алгоритмы управления ДО с декабря 2011 г. были доработаны следующим образом [3]. ДО включаются только им-пульсно по определённым циклограммам. Циклограмма запускается по всем каналам управления, если есть требование на включение ДО хотя бы в одном канале. Длительность циклограмм по всем каналам (крена, тангажа и рыскания) составляет три секунды. Старты циклограмм по всем каналам синхронизированы. В каждом канале циклограмма состоит из четырёх периодов, внутри периода есть «окно», в котором разрешено включение ДО. Начало «окна» совпадает с началом периода. Длительность периодов и «окон» в каждом канале различна. По каналу крена длительности периодов и «окон» составляют: 1,0 и 0,8 с; 0,8 и 0,6 с; 0,6 и 0,4 с; 0,6 и 0,4 с соответственно.
По каналу тангажа : 0,6 и 0,2 с; 0,8 и 0,0 с; 0,6 и 0,4 с; 1,0 и 0,0 с соответственно. По каналу рыскания: 0,6 и 0,2 с; 0,8 и 0,2 с; 0,6 и 0,2 с; 1,0 и 0,4 с соответственно. Команда на включение ДО исполняется, если она сформировалась на начало «окна», и игнорируется, если она появилась внутри него. Внутри трёхсекундной циклограммы могут включаться только двигатели одного знака. Если после окончания циклограммы в течение двух секунд не стартует следующая (отсутствуют команды на включения ДО во всех каналах управления), то формируется задержка в 16 с до начала следующей циклограммы. Данная циклограмма получила название ptc02 . В случае использования модуля дополнительных двигателей по крену МЛМ применяется циклограмма ptc03 , состоящая из 10 периодов общей продолжительностью 5,2 с.
На рис. 3, 4 приведены графики углов и угловые скорости МКС во время перестыковки ТПК «Союз МС-23» № 754 02.04.2023 г. На рис. 5 представлен фрагмент включений ДО на заключительном участке перестыковки. Длительности включений двигателей составляют 0,2–0,6 с. Расход топлива составил 10,1 кг.
Следующей модификацией алгоритмов управления ДО РС была реализация оптимального (по расходу топлива) разворота с использованием псевдо-спектральных методов теории оптимального управления. Развороты станции совершаются по такой траектории, чтобы максимально использовать момент гравитационных сил для переориентации МКС. Оптимальные траектории первоначально (в 2012 г.) были предложены американскими специалистами, затем получили развитие и в алгоритмах СУДН РС [4].
С 2017 по 2019 г. специалистами РКК «Энергия» проводился космический эксперимент «МКС–Разворот», целью которого являлось создание и апробация альтернативных алгоритмов выполнения разворотов МКС. Типичными разворотами МКС являются: разворот вокруг оси рыскания на 180 ° и обратный разворот, проводимые для обеспечения светотеневых условий перед стыковками российских кораблей и после них. В ходе реализации космического эксперимента был разработан и введён в состав бортового программного обеспечения МКС программный компонент отслеживания заданной траектории.
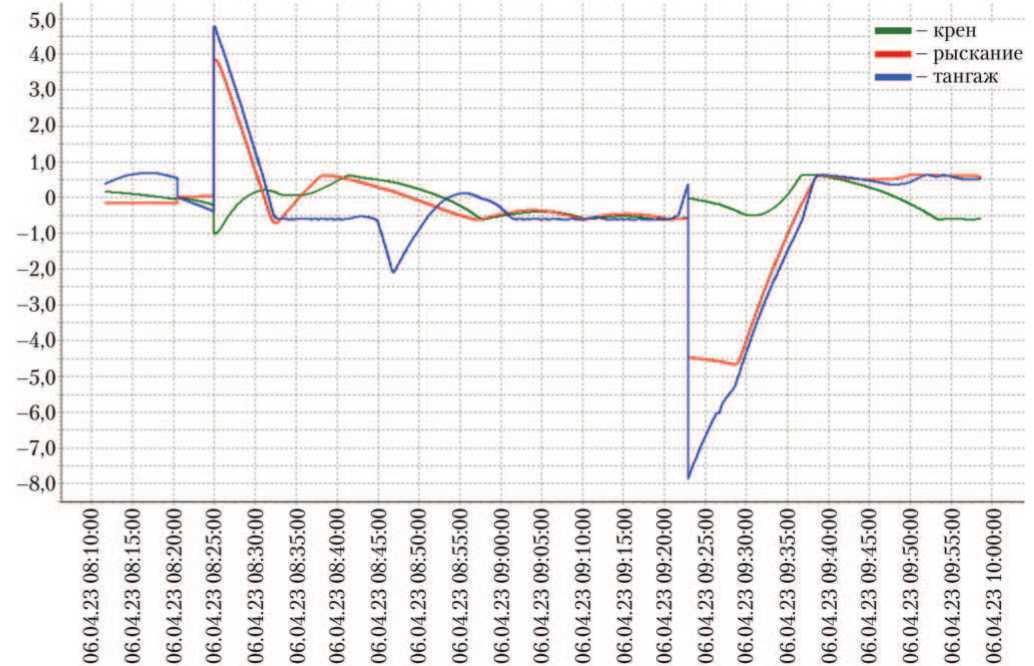
Рис. 3. Графики изменения углов МКС при перестыковке (в градусах) (рисунок создан авторами)
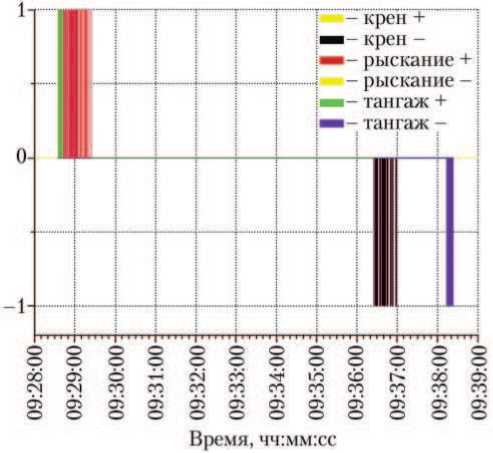
Рис. 5. Команды на включение двигателей ориентации (рисунок создан авторами)
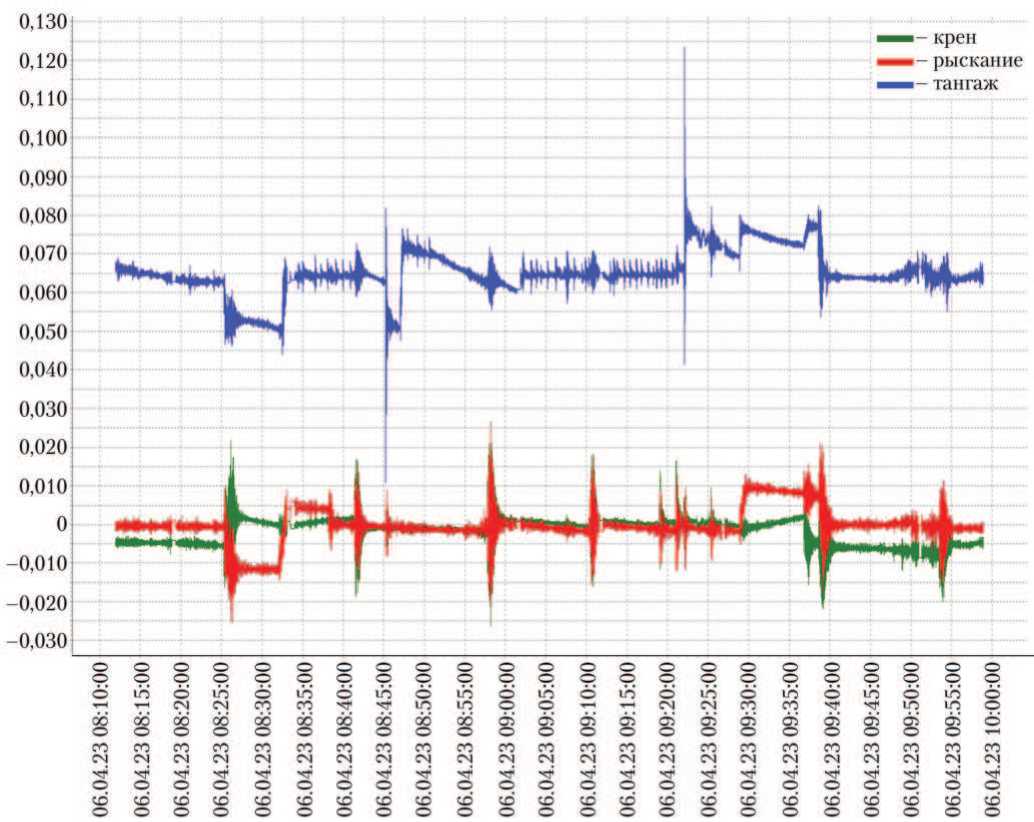
Рис. 4. Графики изменения угловых скоростей МКС при перестыковке ( ° /с) (рисунок создан авторами)
В рамках космического эксперимента были разработаны и апробированы пять различных траекторий переориентации МКС из ориентации «на разгон»
в ориентацию «на торможение» и переориентации МКС в обратном направлении. Траектории отличались длительностью и типом — разворот происходил с переворотом по крену или без переворота. Также развороты выполнялись с использованием различных конфигураций двигателей. Космический эксперимент был успешно завершён, и проведение оптимальных по расходу топлива разворотов МКС методом отслеживания заданной траектории было внедрено в штатную эксплуатацию МКС. В ходе проведения эксперимента было продемонстрировано сокращение расхода топлива на типичный разворот до 5–10 кг вместо 50–60 кг.
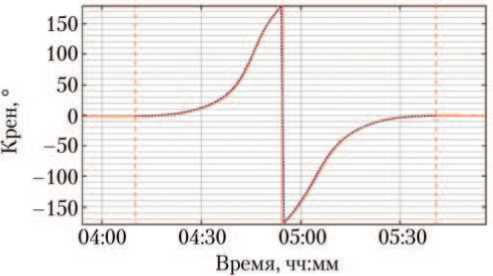
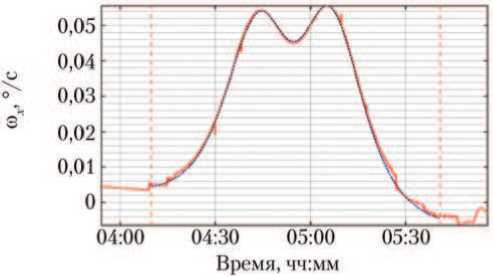
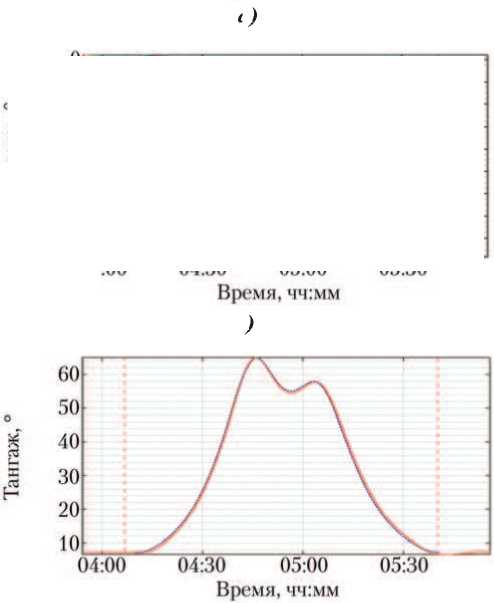
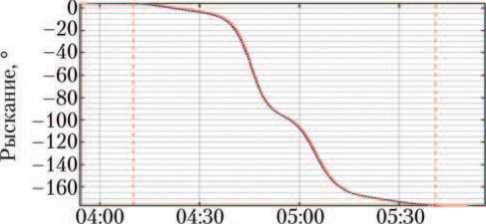
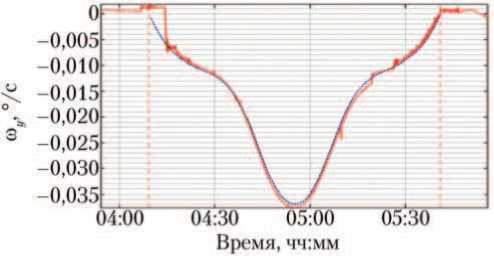
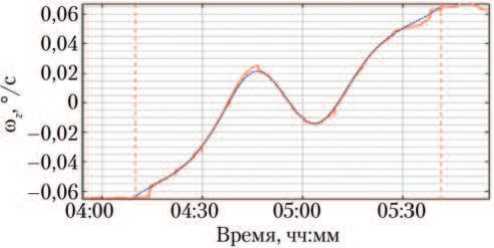
Для переориентаций МКС разработано шестнадцать траекторий длительностью 5 500 с с переворотом по крену — восемь траекторий из ориентации «на разгон» в ориентацию «на торможение» и восемь траекторий в обратную сторону. Траектории рассчитаны для восьми усреднённых конфигураций МКС с отстоящими друг от друга равновесными ориентациями в полтора градуса по тангажу. Дополнительно были разработаны траектории для других типов разворотов с сокращённой длительностью. Разработанные траектории могут использоваться для дальнейшей эксплуатации МКС с учётом всех возможных кораблей посещения. На рис. 6 представлены графики изменения углов и угловых скоростей при развороте МКС из ориентации «на торможение» в ориентацию «на разгон», который был проведён 25 мая 2023 г. после стыковки с ТГК «Прогресс МС-23». На рис. 6, а, в, д отображено изменение ориентации МКС в углах Крылова в последовательности рыскание–тангаж–крен. На рис. 6, б, г, е отображено изменение собственной угловой скорости МКС. Расход топлива на разворот составил 3,98 кг, а всего — 4,78 кг с учётом всех подготовительных операций до и после оптимального разворота.
Разгрузка накопленного кинетического момента CMG с использованием ДО РС при управлении СУДН АС (режим CMG Thruster Assist )
По точностям выполнения разгрузки предъявлялись следующие требования:
-
• точность разгрузки накопленного кинетического момента CMG по величине 20%;
-
• точность разгрузки накопленного кинетического момента CMG по направлению 15 ° .

а)
д)
Рис. 6. Графики изменения углов (а, в, д) и угловых скоростей МКС ш x , ш y , ш z , (б, г, е) по крену (а, б), рысканию (в, г) и тангажу (д, е) при проведении оптимального разворота: ^^ — данные телеметрической информации; — — — расчётные данные траектории; — — — моменты времени начала и окончания разворота (рисунок создан авторами)
в)
е)
Отметим, что для выполнения требований по точностям разгрузки американских силовых гироскопов потребовалось осуществить подбор двигателей ориентации СМ для управления вокруг оси Х таким образом, чтобы разно-тяговость двигателей в парах не превосходила 0,3 кГ.
Разгрузка проводится по следующей схеме. Из АС МКС заранее выдаётся циклограмма, отражающая время включений двигателей для разгрузки. Типичное количество включений составляет от одного до пяти, максимальное — до 30. При необходимости проведения разгрузки из СУДН АС выдаётся команда на её проведение и вектор требуемого изменения кинетического момента Δ H . СУДН РС МКС определяет состав ДО, необходимый для сброса приращения кинетического момента Δ H ; в соответствии с количеством импульсов N , содержащихся в заданной циклограмме, разбивает Δ H на N приращений Δ H / N ; определяет длительности включений ДО по каждому из каналов управления и в общем случае реализует последовательность N включений по каждому из трёх каналов в соответствии с заданной временной циклограммой.
В июне 2007 г. во время нерасчётной нештатной ситуации временно не работали оба компьютера (центральный и терминальный) РС МКС. Был разработан ручной способ разгрузки накопленного кинетического момента CMG АС МКС. В данном способе импульсы ДО выдаются экипажем из корабля «Союз».
Используя автоматический способ разгрузки, американская сторона получила, по сути, возможность управления ориентацией МКС с использованием ДО РС. Соответствующие алгоритмы были разработаны американскими специалистами и используются с 2012 г., например, при проведении оптимальных разворотов МКС под управлением американского сегмента станции.
Заключение
Представлены материалы по проектированию, разработке и работе системы управления движением МКС, включающей СУДН РС и СУДН АС. СУДН РС и СУДН АС создавались совместимыми на организационном, семантическом и техническом уровнях, то есть являются интероперабельными системами, согласно положениям ГОСТ Р 55062-2021 [5]. Подробно описано взаимодействие систем управления движением и навигации российского и американского сегментов МКС, обмен данными между системами, порядок передачи управления от одной системы к другой в штатных и нештатных ситуациях.
Рассмотрено управление ориентацией МКС с помощью реактивных двигателей, приведены модификации алгоритмов на разных стадиях полёта МКС. Описаны результаты космического эксперимента «МКС–Разворот» по проведению разворотов МКС с минимальным расходом топлива. Разработанные в ходе проведения эксперимента методики переориентации станции внедрены в штатную эксплуатацию МКС.
Приведены данные по способам разгрузки американских силовых гироскопов при управлении ориентацией СУДН АС.
Разработанные алгоритмы позволили сократить расход топлива на выполнение динамических операций и уменьшить нагрузки на элементы конструкции станции.
Список литературы Проектирование, создание и развитие системы управления движением и навигации Российского сегмента Международной космической станции
- Бранец В.Н., Платонов В.Н. Система управления движением и навигации Российского сегмента МКС // Гироскопия и навигация. 2002. № 4(39). С. 13-22. EDN: RVZQKP
- Микрин Е.А., Тимаков С.Н., Зыков А.В., Сумароков А.В., Жирнов А.В., Богданов К.А. Опыт и перспективы создания бортовых алгоритмов управления движением космических аппаратов // Вестник РФФИ. 2017. № 3(95). С. 23-45. DOI: 10.22204/2410-4639-2017095-03-23-45 EDN: ZSMGUX
- Gomez S., Platonov V., Medina E., Borisenko A., Bogachev A. Unexpected control structure interaction on the International Space Station (ISS): paper of the 68th International Asronautical Congress. Adelaide. 25-29 September 2017. IAC-17, B3,4-B6.5,1,x39055. 15 p.
- Прутько А.А., Атрошенков С.Н., Богачев А.В., Старченко А.Е. Использование псевдоспектрального метода для поиска траекторий оптимальных по расходу топлива разворотов Международной космической станции // Космическая техника и технологии. 2019. № 4(27) С. 121-133. EDN: TUPOQN
- ГОСТ Р 55062-2021. Информационные технологии. Интероперабельность. Основные положения. М.: ФГБУ "РСТ", 2021.
