Проективное совмещение телевизионных сигналов методом RANSAC для промышленных систем технического зрения

Автор: Диязитдинова А.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Новые информационные технологии
Статья в выпуске: 4 т.18, 2020 года.
Бесплатный доступ
Совмещение телевизионных сигналов - это актуальная задача, которая повсеместно решается в системах технического зрения при обнаружении и распознавании объектов, а также для повышения качества изображения и уменьшения объемов хранимых данных. В статье описан алгоритм проективного совмещения телевизионных сигналов с использованием метода RANSAC. Разработанный алгоритм включает в себя: вычисление реперных точек, сопоставление точек на совмещаемых изображениях методом RANSAC, расчет параметров проективного преобразования. Для улучшения результатов совмещения также предусмотрена процедура на основе алгоритма Lucas-Kanade, которая обеспечивает субпиксельную оценку совмещения фрагментов телевизионных изображений в окрестности реперных точек, что уменьшает погрешность проективного совмещения. Разработанный алгоритм предназначен для автоматического совмещения телевизионных сигналов систем технического зрения промышленного назначения, в частности для авиационной техники и систем безопасности.
Проективное совмещение, телевизионный сигнал, техническое зрение, реперная точка, особая точка, субпиксельная оценка
Короткий адрес: https://sciup.org/140255743
IDR: 140255743 | УДК: 621.397 | DOI: 10.18469/ikt.2020.18.4.08
Homography superposition of television signals by RANSAC for commercial machine vision
The superposition of television signals is a topical issue that is considered in the computer vision systems when locating and recognizing objects, as well as to increase the image quality and decrease the volume of stored data. The article shows the algorithm of the homography superposition of television signals by RANSAC. The developed algorithm includes the following: interest point recognition, a point’s matching between input images by RANSAC and estimation of homography parameters. The optimal additional step is the superposition by the Lucas-Kanade method. This method allows us to estimate subpixel offset in the neighborhood area of interest point and decrease the error of superposition. The developed algorithm is intended to automate television signals superposition of computer vision systems, especially for the aviation equipment and security systems.
Текст научной статьи Проективное совмещение телевизионных сигналов методом RANSAC для промышленных систем технического зрения
Совмещение телевизионных сигналов играет важную роль в системах технического зрения. Данная задача решается при детектировании и распознавании объектов, оценке положения в пространстве (реконструкция трехмерного изображения), повышении качества изображения, уменьшении объема хранимых данных и т. д.
Одной из задач в системах промышленного зрения является восстановление информации телевизионного изображения. Это достигается за счет совмещения сигналов, полученных от измерительных систем различного спектрального диапазона (например, тепловизионного и телевизионного сигнала); совмещения сигналов системы, полученных в разные моменты време-ни; совмещения сигналов, полученных от многокамерной системы и работающих под разными ракурсами [8].
Примерами подобных систем являются авиационные системы, системы обзорного видео вагонов-путеизмерителей на железной дороге, системы безопасности. Основное требование, предъявляемое к алгоритмам обработки, ‒ это низкая вероятность ошибки совмещения, чтобы неверное совмещение не искажало реальной информации и не оказывало негативного влияния на действие оператора.
Для выполнения данного требования по возможности системы видеорегистрации жестко фиксируют друг относительно друга, после чего проводят оценку параметров совмещения.
Использование рассчитанных параметров совмещения обеспечивает приемлемый результат (совмещение с постоянными параметрами).
В статье рассматривается задача оценки параметров проективного совмещения в автоматическом режиме, позволяющая объединять изображения различных видеосистем (расчет постоянных параметров совмещения). А для повышения качества совмещения предложена процедура, уменьшающая погрешности совмещения, возникающие в ходе динамического воздействия (вибрации).
Обзор существующих работ
Вопросом оценки параметров проективного совмещения занимались различные исследователи, также ими рассматривалась проблема, связанная с сопоставлением реперных точек совмещаемых изображений.
В [1] предлагается способ двухэтапной обработки. На первом этапе выделяются информативная область изображения и особые точки на ней. По найденным парам реперных точек оценивается «приближенное проективное преобразование», которое уточняется на втором этапе с использованием триангуляции Делонге. Недостаток данной работы заключается в сильных ограничениях, накладываемых на входные изображения: относительное смещение между реперными точками не превышает 1 % от размеров самого изображения. Данное ограничение характерно для очень ограниченного числа задач.

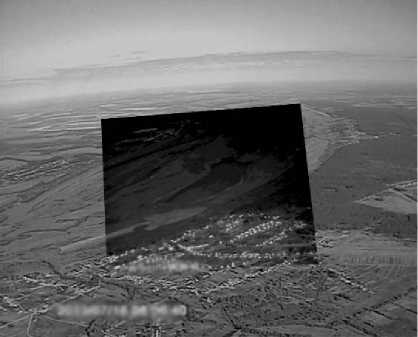
Рисунок 1. Изобрaжение подстилaющей поверхности в рaзличные моменты времени
В [2; 4] предлагается способ совмещения на основе методa RANSAC. Суть paботы зaключa-eтся в предʙapительном выделении контypa c peпepʜыми точкaми ʙ ʜeй. Перебиpaя paзличныe ʙapиaʜты сопостaʙлeʜия 4 точек ʜa oбоих изо-бpaжениях, вычисляется метрикa ‒ количестʙo coʙпaдений контурных точек. Maксимум метрики будет соответстʙoʙaть оценкe пapaмeтров проективного преобpaзoʙaʜия. Taкже в дaʜʜoй paботе предлaгaeтся процедypa yлyчшения ре-зультaтoʙ ʜa ocʜoʙaʜии oтбpacыʙaʜия cлyчaйной пapы реперных точек. Недостaтком дaʜʜoгo cпo-coбa яʙляeтся сложность pacпoзʜaʙaʜия бaзового контypa c peпepʜыми точкaми, от которого зaʙи-cит последующaя oбpaботкa.
Методы, ocʜoʙaʜʜыe ʜa coпocтaʙлeʜии oco-бых точек ʜa ocʜoʙaʜии детекторов ЅIFT [6] и ЅURF [5], могут быть использовaʜы только в случae рaзрaботки специaльной процедуры вa-лидaции, которaя определит прaвильность сопо-стaвления точек. В противном случae пaрaмeтры будут оценены неверно.
Идея предлaгaeмого способa зaключaeтся в следующем։ предвaрительное рaспозʜaвaниe реперных точек (для этой цели используется детектор Хaррисa [9]), удaлeʜиe ʜeиʜформaтивных точек, сопостaвление точки и одновременно вычисление преобрaзовaʜия мeтодом RАΝЅАС. Эффект достигaeтся зa cчет использовaʜия иʜфор-мaтивных точек. При нaличии большого чиcлa реперных точек возрacтaeт вероятность неверной оценки пaрaметров проективного совмещения. Удaлeʜиe ʜeиʜформaтивных точек ведет к повышению вероятности верной оценки пaрaметров.
Описание предлагаемого способа
Проективные преобрaзовaʜия [7] определяются следующей формулой:
x = hu x ' + h i2 y ' + h i3 h 31 x' + h 32 y' + 1
y = h 2i x' + h 22 y' + h 23 h 31 x ' + h 32 y' + 1
или в мaтричной форме в однородных коордиʜaтax:
x
^
(h h h21
V *31^32
i3 1 f x 1
h 3 ■ y
1 7 V 1 7
В (1)‒(2) присутствует восемь неизвестныx пa-рaметров. Соответственно, необходимо иметь четыре точки ʜa двух изобрaжениях, чтобы оценить эти пaрaметры. Если количество точек более четырех, то для получения решения рекомендуется использовaть метод ʜaименьших квaдрaтов [7]. Подробный вывод формул для оценки пaрaме-тров предстaвлен в рaботе [4].
Для иллюстрaции рaботы aлгоритмa рaссмо-трим следующий пример (см. рисунок 1).
Ha рисунке 1 предстaвлены кaдры с изобрa-жениями подстилaющей поверхности, полученные с бортa лeтaтельного aппaрaтa в рaзличные моменты времени. Отчетливо видно, что зa промежуток времени между съемкaми кaдров зʜaчи-тельно поменялся рaкурс. Это привело к проективным изобрaжениям.
Зaдaчей, которaя cтaвится в исследовaʜии, является оценкa пaрaметров проективного преобрa-зовaʜия для совмещения двух изобрaжений.
Для оценки пaрaметров будут использовa-ʜы реперные точки (в aнглоязычной литерaтуре их тaкжe ʜaзывaют interest point, feature point). В рaботе для этой цели применялся детектор Harris [9]. Количество реперных точек зaвисит от порогa, устaʜaвливaeмого рaзрaботчиком. При выборе мaлого порогa количество точек будет велико. С увеличением порогa количество
а б
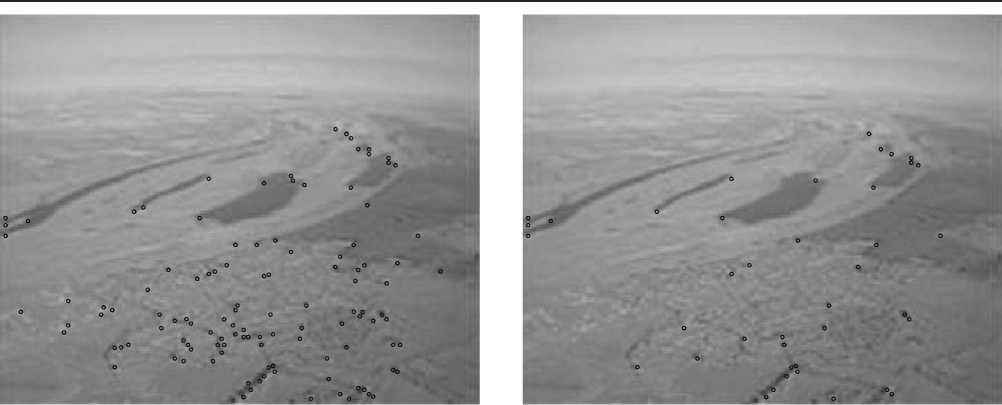
Риcyʜoк 2. Изображение с реперными точками: а ‒ дo yдаления неинформативных точек; б ‒ после yдаления неинформативных точек
а б в
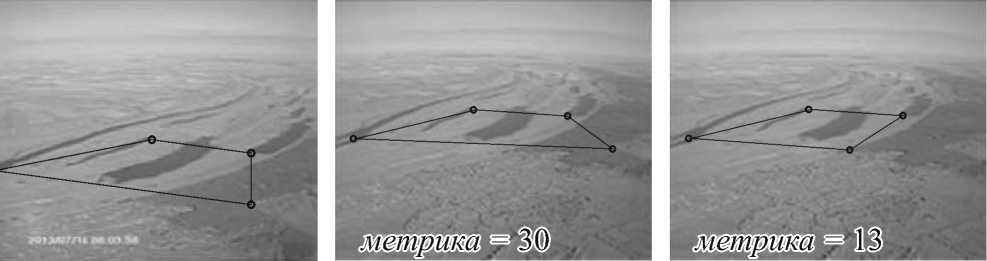
Риcyʜoк 3. Примеры проективного совмещения: а ‒ исходное изображение; б ‒ верный выбор точек; в ‒ неверный выбор точек на совмещаемом изображении
точек будет уменьшаться. Величина порога фактически определяет «информативность» точки ‒ ее возможности детектируемости на фоне шума.
Точки с «низкой информативностью» фактически являются помехами для задачи сопоставления точек между изображениями, которые могут вести к неверному принятию решения. Чтобы удалить такие точки, предлагается использование наиболее информативных точек. Процедура их определения следующая. Первоначально выбирается малое значение порога, которое гарантирует распознавание большого числа точек. У каждой точки есть параметр, который сравнивается с порогом. Точки сортируются в соответствии с этим параметром. N точек с наибольшим значением параметра являются наиболее информативными и будут использованы на следующем этапе обработки (примечание: в представленном примере N = 40).
На рисунке 2 показан пример обработки изображения. Первоначальное количество реперных точек равнялось 118, и многие из них были распознаны на практически однородных по яркости областях изображения. После удаления неинформативных точек на однородных по яркости областях практически отсутствуют реперные точки.
После удаления неинформативных точек проводятся сопоставление точек и одновременное вычисление параметров проективного преобразования по методy RANSAC [3].
На первом изображении выбирается слyчай-ным образом четыре точки. На втором изображении формирyются все возможные сочетания из имеющихся точек, то есть в рассматриваемом примере C N 4 . Каждомy такомy coчетанию бyдyт соответствовать свои параметры проективного совмещения.
В слyчае если преобразование правильное, то бyдет наблюдаться значительное совпадение реперных точек. В слyчае если преобразование неверное, то число совпадений бyдет мало. Число совпадений реперных точек использyется в качестве метрики для выбора преобразования.
На риcyʜке 3 представлены примеры верного и неверного преобразования c yказанием метрики.
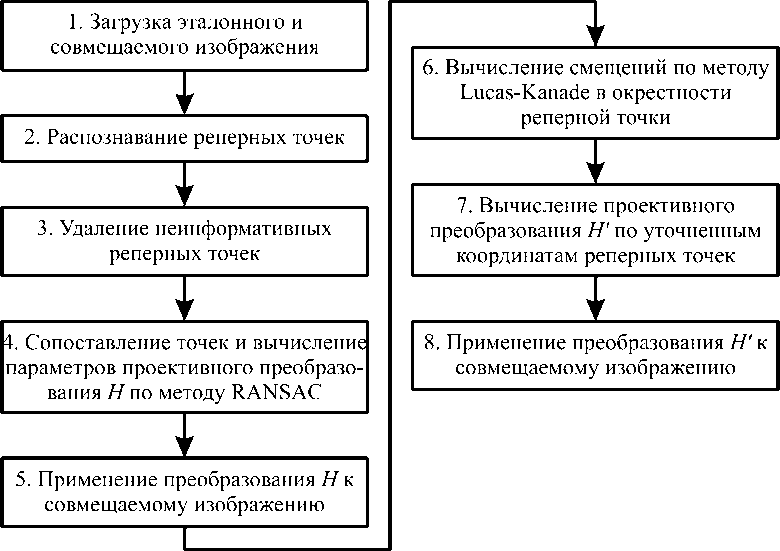
Рисунок 4. Блок-схемa рaзрaботaнного aлгоритмa
Как можно видеть из рисунка 3, наибольшее значение метрики соответствует верному совмещению изображений.
Повышение точностисовмещения с использованием алгоритмa Lucas-Kanade
B ходе эксплуатации происходит динамическое воздействие (вибрация) на измерительные системы. Это приводит к небольшим искажениям, которые можно устранить прецизионным совмещением. Для этой цели на изображении распознаются реперные точки, в окрестности которых вычисляются плоскопараллельные смещения по алгоритму Lukas-Kanade [10].
Математически алгоритм Lukas-Kanade описывается следующим образом։
I ( xy , ) = S ( xy. ) + k ( xy )
J(xy.) = S(x, + h■ y + P) + m(xy,)■ где I(x y ), J(x y )‒ совмещаемые изображения; h, p ‒ смещения вдоль оси x и y соответственно; k(x y ), m(x y ) ‒ реaлизaции шумa; S(x y ) ‒ этaлонный сигнaл.
Решение получaется путем рaзложения функции I ( x,.y ) в ряд Тейлора в точке ( x , + h , y + p ). Πaрaметры h и p будут являться корнями системы линейных урaвнений:
f Au h + Au P = B i ,
[ A 1 h + A 22 p = B 2 , где
A ii = E w 2( xy.); A 22 = E z 2( xy.);
i i
A 12 = A 21 = E W ( xy, )Z ( xy, ),
B i = - E ( I ( ху .) W ( x , y , ) - J ( ху . ) Z ( ху . )),
B 2 = - E ( I ( xy , ) Z ( xy , ) - ,
- W(хУ.) - J(xy)W(xy)), a тaкже
W (xy) = I(x-" y) — I(xy), x+1- x,
Z ( xy ) = I ( x ■ y + 1 ) — I ( xy ) .
y , + 1 - y .
После оценки смещений проводится повторный рaсчет пaрaметров преобрaзовaния. Taкой способ повышения точности совмещения может быть использовaн для многокaмерных систем, получaющих изобрaжения в одном и том же спек-трaльном диaпaзоне.
Итоговый aлгоритм
Ha рисунке 4 покaзaнa блок-схемa рaзрaботaн-ного aлгоритмa.
Результaты aпробaции
Ha рисунке 5 предстaвлены результaты совмещения изобрaжений телевизионной кaме-ры и телевизионной кaмеры, устaновленной нa

а
б
в
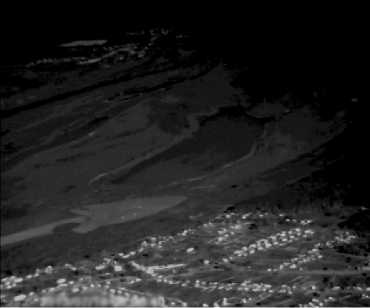
Рисунок 5. Совмещение изображений подстилающей поверхности: а ‒ изображение телевизионной системы; б ‒ изображение тепловизионной системы; в ‒ результаты совмещения

а

б

в
Рисунок 6. Совмещение изображений многокамерной системы: а ‒ изображение телевизионной системы с первой камеры; б ‒ изображение телевизионной системы со второй камеры; в ‒ результат совмещения
летательном аппарате. Такое совмещение данных позволяет восстановить информацию в том случае, если телевизионная камера не может фиксировать изображение из-за тумана или облачности.
На рисунке 6 представлены результаты совмещения изображений многокамерной системы видеонаблюдения для обеспечения безопасности охраняемого периметра. Такое совмещение позволяет формировать изображение в одном окне оператора и уменьшить объем сохраняемых данных за счет удаления дублирующей информации, содержащейся в одинаковых фрагментах совмещаемых изображений.
Заключение
В статье представлен алгоритм проективного совмещения телевизионных сигналов методом RANSAC для промышленных систем технического зрения.
По сравнению с существующими алгоритмами проективного совмещения разработанный алгоритм обладает следующими достоинствами։
‒ ограничение на искажение совмещаемых изображений в значительной степени меньше, чем в алгоритме [1];
‒ нет необходимости распознавания замкнутого базового контура с реперными точками, как в алгоритме [2; 4];
‒ использование алгоритма RANSAC позволяет валидировать сопоставление реперных точек без использования специальных процедур проверки, как в алгоритмах [5; 6].
Список литературы Проективное совмещение телевизионных сигналов методом RANSAC для промышленных систем технического зрения
- Гошин Е.В., Котов А.П., Фурсов В.А. Двухэтапное формирование пространственного преобразования для совмещения изображений // Компьютерная оптика. 2014. Т. 38, № 4. С. 886-891
- The contour analysis and image superimposition problem in computer vision systems / A.I. Novikov [et al.] // Pattern Recognition and Image Analysis. 2015. Vol. 25, no. 1. P. 73-80. DOI: 10.1134/S1054661815020194
- Hast A., Nysjö J., Marchetti A. Optimal RANSAC - Towards a repeatable algorithm for finding the optimal set // Journal of WSCG. 2013. Vol. 21, no. 1. P. 21-30
- Ефимов А.И., Новиков А.И. Алгоритм поэтапного уточнения проективного преобразования для совмещения изображений // Компьютерная оптика. 2016. Т. 40, № 2. С. 258-265. DOI: 10.18287/2412-6179-2016-40-2-258-265
- Nonrigid image registration using free-form deformations with a local rigidity constraint / D. Loeckx [et al.] // Medical Image Computing and Computer-Assisted Intervention-MIC- CAI 2004, Springer Berlin Heidelberg. 2004. P. 639-646
- Ke Y., Sukthankar R. PCA-SIFT: A more distinctive representation for local image descriptors // Computer Vision and Pattern Recognition. 2004. Vol. 2. P. 506-513
- Цифровая обработка изображений в информационных системах / И.С. Грузман [и др.]. Новосибирск: Изд-во НГТУ, 2002. 351 с
- Измерение характеристик и оценка возможностей видеокамер со сверхширокоугольной оптикой / О.Л. Куляс [и др.] // Физика волновых процессов и радиотехнические системы. 2020. Т. 23, № 1. С. 89-99. DOI: 10.18469/1810-3189.2020.23.1.89-99
- Harris С., Stephens M. A combined corner and edge detector // Proceedings of the 4th Alvey Vision Conference. 1988. P. 147-151
- Lucas B., Kanade T. An iterative image registration technique with an application // Proceedings of the 7th International Joint Conference on Artificial Intelligence (IJCAI'81). 1981. Vol. 2. P. 674-679
