Проектная отстройка критических скоростей ротационных агрегатов машин

Автор: Полушкин Олег Олегович, Полушкин Олег Алексеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 10 (61) т.11, 2011 года.
Бесплатный доступ
Представлены оригинальная методика и реализующий её на ЭВМ алгоритм разнесения (удаления друг от друга) эксплуатационных и критических скоростей вращения проектируемого ротационного агрегата (отстройка критических частот). Его использование исключает возможность появления в работе машин значительных упругих деформаций оси и обусловленных этим дисбалансов агрегата, снижает трудозатраты его балансировки при гарантированном обеспечении её качества.
Ротор, проектирование, критическая скорость, отстройка
Короткий адрес: https://sciup.org/14249515
IDR: 14249515 | УДК: 531:62-251
Design-stage adjustment of rotor critical speeds
Know-how and the computer-applied diversity algorithm (removal) for the operational and critical rotation speeds of the rotor at the design stage (critical frequencies adjustment) are offered. Its application eliminates the possibility of significant axle elastic strains and specified rotor imbalances. It also reduces balancing costs providing the guaranteed quality of the process.
Текст научной статьи Проектная отстройка критических скоростей ротационных агрегатов машин
Введение. Реальные ротационные агрегаты (роторы) машин имеют конечную изгибную жёсткость своей оси, что предопределяет наличие у каждого из них множество к = 1,2, ..., п, ... критических скоростей ш к вращения. При близких или совпадающих значениях эксплуатационной (ооэ) и любой из критических скоростей вращения теоретически неограниченно растёт упругий изгиб оси ротора по к-й собственной форме и связанные с этим дисбалансы ротора, приводящие к аварийным ситуациям и потому недопустимые в эксплуатации машин. В этих случаях предпочтительными при создании ротационных агрегатов являются не поиски методов и средств их балансировки (она будет иметь очень высокую стоимость, крайне малую эффективность), а поиск иных способов и средств ликвидации отмеченных явлений.
Такие средства оказываются эффективными и в случаях, когда проектные расчёты по алгоритму классификации роторов по признаку «гибкость» [1] выявили принадлежность создаваемого агрегата к классу квазигибких роторов. В сравнении с балансировкой жёстких и квазижёсг-ких роторов, балансировка квазигибких требует более сложного, а значит, и более дорогостоящего оборудования, её трудоёмкость значительно выше. Последние обстоятельства заставляют проектировщиков корректировать конструкцию создаваемого агрегата так, чтобы из класса квазигибких она попала в класс квазижёстких роторов.
Постановка задачи. Решение отмеченных задач осуществляется отстройкой критических частот, которая сводится к разнесению (удалению друг от друга) эксплуатационных (соэтах) и критических (шкрк, к = 1,...,п^ скоростей вращения проектируемого агрегата. Это может осуществляться двумя способами:
-
- уменьшение эксплуатационной скорости а)этах;
-увеличение шкрк, возможно и совместное использование этих способов.
Реализация первого способа не всегда представляется возможной, поскольку эксплуатационная скорость ооэ вращения проектируемого агрегата регламентируется показателями работоспособности и качества функционирования как этого агрегата, так и машины в целом. Как правило, снижение ооэ ведёт к снижению уровня отмеченных показателей.
Второй способ является предпочтительным. Его реализация основана на использовании оригинальной механико-математической модели неуравновешенности ротора, разработанной в [1]. Решение задач. Рассмотрим типичный двухопорный ротационный агрегат, представляющий из себя несущую основу (в виде трубы круглого сечения), испытывающую при вращении изгибные деформации оси от действия неуравновешенности, на которой установлены (жёстко или шарнирно) рабочие элементы (резаки, ножи, молотки или т. п.) Динамическую модель этого агрегата представляем в виде однородной исходно изогнутой на межопорном расстоянии пространственной линии, которая раскладывается по собственным формам изгиба в различных плоскостях, содержащих ось вращения агрегата [2].
Решим сначала задачу для агрегата, который балансируется по первой (k = 1) собственной форме изгиба и по результатам расчётов отнесён к классу (G = 4) гибких роторов. При этом для него выполняется условие [1]
где Е— модуль упругости материала несущей основы агрегата, Па; J— момент инерции сечения этой основы, м4; /— расстояние между опорами ротора, м; т — масса ротора, кг:
m = h! + mp3,
в котором F— площадь сечения упруго деформируемой основы агрегата, м2; у — плотность материала этой основы, кг/м3; трз — масса всех рабочих элементов агрегата, установленных на этой основе, кг.
Рассматривая противоположное (1), получили условие возможности рассмотрения вопросов балансировки проектируемого агрегата не как гибкого (С = 4), а как квазигибкого (С = 3) ротора в виде
^mp3)F 0,734 ЕА ’ " <ах
Имея заданными значения у, /, трз, Е, созтах, известными методами сопротивления материалов находятся геометрические характеристики J, F сечения упруго деформируемой основы агрегата, обеспечивающие выполнение условия (3). По ним подбираются размеры этого сечения и вносятся изменения в конструкцию агрегата (если это не противопоказано по иным соображениям).
Решение задачи отстройки критической частоты для перевода проектируемого агрегата из класса квазигибких (G =3) в класс квазижёстких (G = 2) при неизменном сп х<аг„. производится также увеличением изгибной жёсткости упруго деформируемой основы агрегата.
Предельными условиями, сформулированными в [1] для обоснования возможности отнесения проектируемого агрегата к классу G = 2, будем считать допустимость его динамической балансировки по традиционной технологии на типовом балансировочном оборудовании со скоростью соб = соВтах, допускаемой этим оборудованием, в двух плоскостях коррекции, отстающих от опор на расстояниях А = С = 0,3/, с точностью Одоп = 0,ADCT доп, где DCT доп = -—-т — допусти-^этах мое значение главного вектора дисбалансов, определяемое с помощью максимального значения критерия [еш] качества балансировки для рекомендованного по МС ИСО 1940 [3] класса точности балансировки этого агрегата.
С приведением сбалансированного таким образом агрегата во вращение с максимальной главный вектор дисбалансов D^ от
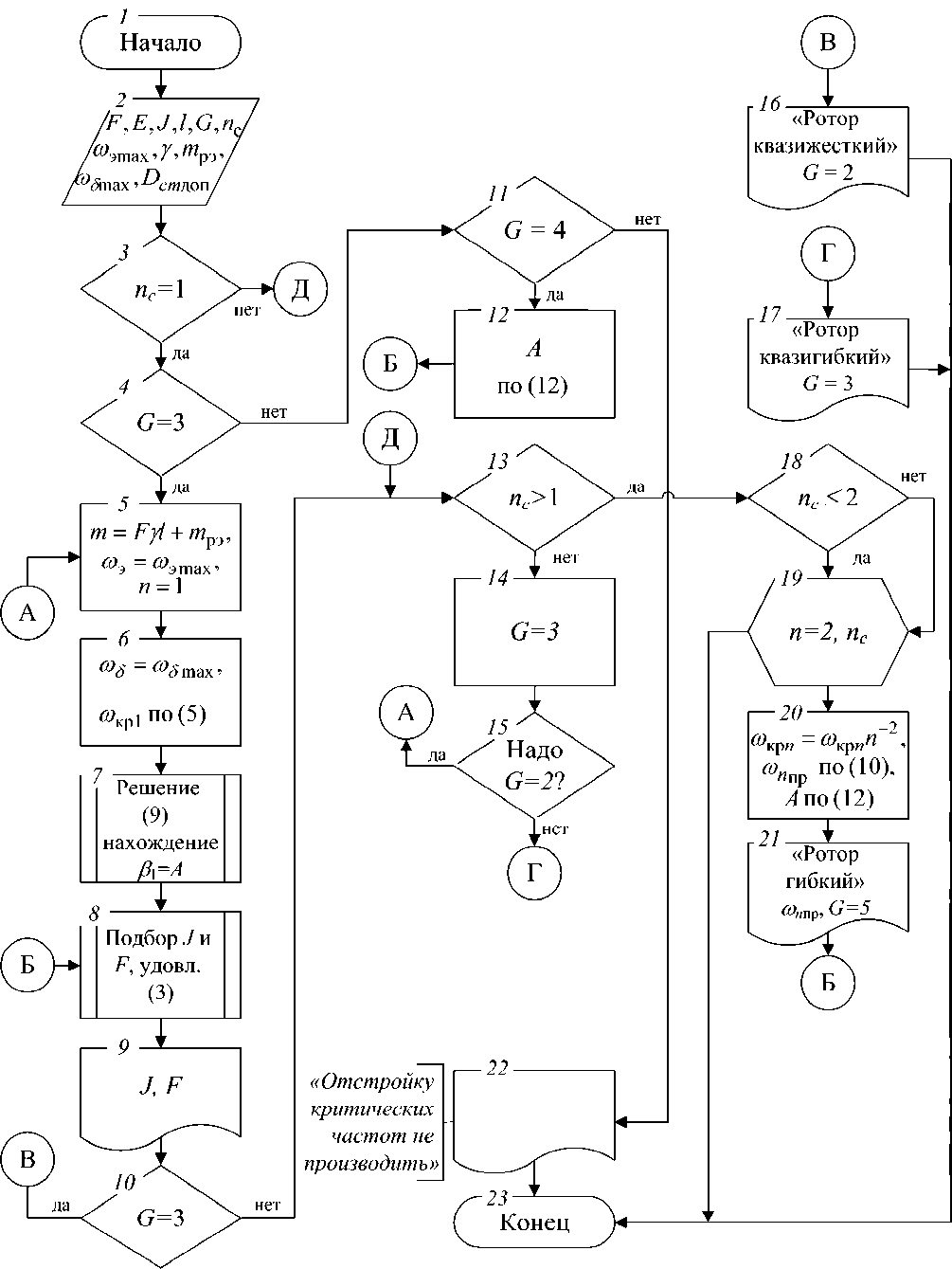
эксплуатационной скоростью собтах <шзтах D«i6 = gmylmax где у1тах — стрела исходного неупругого искривления оси ротора по 1-й собственной форме изгиба, предельное значение которой для рассматриваемой несущей основы из трубы по ГОСТ Р 8732 составляет у1тах =0,75/, м; а, = р,со2; alfj=|W; Ь, = 1,ОЗр,со2; ^=1,03Р1а)й, в которых тр 1 =^=0,01—. Значение главного вектора D^ остаточных дисбалансов такого агрегата на скорости со3 = созтах его вращения в пределе составит Doer — Doct + UИ16 / в котором Doct — главный вектор остаточных дисбалансов ротора после его балансировки на скорости . Проведённая балансировка квазигибкого ротора как квазижёсткого будет качественной, если D^ < DCT доп, или с учётом (6) L/ ост СТ доп е Полагая в последнем D^ = Одоп = 0,4£)ст доп, приводим его к виду D^< 0,6/? . Раскрывая D^ по (4), с учётом сделанных к нему пояснений, привели (8) к виду 1 1+1,03^ 1-^ш2 1-Р^2 1 + 1,03(3^ < 1 28 ^ст лоп ' ml где ОСТДОП в гм, т в кг, / в м. При определённых значениях ш3 =шэтах, ш5 = шВтах, Остдоп, т, / численным решением находим значение ₽t = >4 > 0, удовлетворяющее неравенству (8). Раскрывая ₽t по (5), после преобразований, проведённых с учётом (2), последнее условие привели к виду, совпадающему с (3) при ином способе нахождения значения А. Используется оно так же, как и (3), позволяя перевести проектируемый агрегат из класса G = 3 квазигибких в класс G = 2 квазижёстких роторов внесением изменений в конструкцию упруго деформируемой основы этого агрегата. Как результат — показатели эффективности балансировки этого агрегата резко возрастают. Следует заметить, что при решении (9), рассматриваемом как равенство относительно ₽t и нахождения тем самым значения А, подставляемого в (3), значение т, входящее в (9), определяется исходной массой квазигибкого ротора. С изменением конструктивных параметров агрегата, необходимых для его перевода в класс G = 2, масса агрегата увеличится. Однако при этом результаты расчёта значения А по (9) корректировать не следует, поскольку с ростом т неравенство (9) усиливается. Рассмотрим, наконец, случай агрегата, требующего балансировки по л(>1)-й собственной форме (С = 5). Этот агрегат отбалансирован по всем k = 1,2,..., (л -1) собственным формам изгиба и имеет < w3max< шкр „, где для описанной выше модели ротора со^ „ = сохр1 • л2. Принимаем, что при некоторой скорости вращения агрегата со (Ю) упругий изгиб оси ротора по /т-й собственной форме практически не проявляется, и отстройка критической частоты не требуется. Эту задачу необходимо решать лишь при созтах > оол пр, с тем чтобы последнее неравенство было нарушено, т. е. было обеспечено оозтах < со„ пр. Подставив сюда равенство (10) и произведя преобразования, получили оо.____ (И) Раскрыв со л по представленному выше соотношению с учётом (5), окончательно привели условие обоснования качественной балансировки агрегата по л(>1)-й собственной форме к виду (3) при л4 А = — ^этах Использование соотношений (3), (12) для рассматриваемого ротационного агрегата (С = 5) осуществляется так же, как и в описанных выше случаях проведения отстройки критических частот вращения. На рис. представлена блок-схема формализованного для использования ЭВМ алгоритма решения задачи отстройки критической частоты вращения проектируемого ротационного агрегата, если необходимость решения такой задачи ставится проектировщиком после анализа «гибкости» созданной им конструкции агрегата, определения класса G спроектированного агрегата и номера л собственной формы изгиба при его балансировке. Раскрывая содержание блоков этого алгоритма, отметим: - в блоке 2 вводятся исходные для проектного расчёта, содержание которых раскрыто ранее, кроме пс= п — введённый ранее номер собственной формы изгиба, по которой необходимо балансировать агрегат; - блок 3 — условный переход. Если условие блока выполняется, ротор балансируется по первой собственной форме изгиба и расчёт переходит к блоку 4, выявляющему, к какому классу отнесён рассматриваемый агрегат по результатам обоснования его класса по признаку «гибкость» [1]. Если ротор отнесён к классу квазигибких (G = 3), в блоках 5...9 рассчитываются и выдаются на печать необходимые значения 7и F сечения упруго деформируемой основы агрегата, при которых, через обязательное выполнение условия блока 10, ротор переводится в класс квазижёстких переходом к блоку 16; ловия ван ия блока - если условие блока 4 не выполняется, расчёт переходит к блоку 11. При выполнении ус-этого блока — спроектированный агрегат является гибким (С = 4) по результатам обосно-его класса, расчёт переходит к блоку 12 и далее к блокам 8, 9. Поскольку G = 4, условие 10 не выполняется. Не выполняется и условие блока 13, т. к. рассматривается случай nc = 1, поэтому расчёт переходит к блоку 14, где полагается G = 3 — ротор становится квазигиб-ким; Рис. Блок-схема алгоритма отстройки критической частоты проектируемого агрегата - блок 15 — условный переход, который устанавливает, следует ли спроектированный агрегат с выданными на печать значениями 7и F переводить из класса квазигибких (С = 3) в класс квазижёстких (С = 2). Если это следует сделать, то расчёт переходит к блоку Бив блоках 6...9 определяются характеристики J и F, которые должен иметь проектируемый агрегат для перевода его через блок 10 (его условие выполняется) к блоку 16. Если условие блока 15 не выполняется, расчёт переводится к блоку 17 и проектируемый агрегат с выданными на печать значениями 7и F относится к квазигибким; - если условие блока 3 не выполняется, расчёт переходит к блоку 13 и при невыполнении условия последнего ротор рассматривается как квазигибкий, который с помощью блока 15 может быть переведён в класс квазижёстких; - если условие блока 13 выполняется, ротор необходимо балансировать по пс(> 1)-й собственной форме изгиба; - для каждой из собственных форм п = 2...лс в цикле 19 находится предельная скорость оо„ пр и для гибкого ротора, балансируемого по л-й собственной форме изгиба (блок 21), через блоки 8,9 определяются характеристики 7и Fсечения несущей основы ротора; - для ротора, балансируемого по 1-й собственной форме изгиба (условие блока 3 выполняется) и не относящегося к квазигибким (условие блока 4 не выполняется) в блоке 11 производится проверка, не относился ли спроектированный агрегат к классу гибких (С = 4). Если условие блока 11 выполняется, в блоках 12, 8, 9,10 обосновываются параметры 7и F ротора, переводящие его в класс квазигибких (С = 3) или, по необходимости (через блоки 10,13,14,15, 5, 6, 7, 8, 9), и в класс квазижёстких. Если же для рассматриваемого ротора условие блока 11 не выполняется, он относится к жёстким, и переходом к блоку 22 снимается необходимость отстройки критической частоты вращения спроектированного агрегата. По описанной блок-схеме разработана программа для ЭВМ. Заключение. В подавляющем большинстве случаев выявление принадлежности проектируемого ротационного агрегата к классу гибких роторов требует отстройки его критической частоты. Осуществление этой отстройки по представленной оригинальной методике и алгоритму расчётов на ЭВМ позволяет: - ротор, балансируемый по первой собственной форме, перевести (по усмотрению проектировщика) в класс квазигибких или в класс квазижёстких; - для ротора, балансируемого по л(>1)-й собственной форме и имеющего предельное допустимое значение оол пр скорости вращения меньше, чем максимальная эксплуатационная скорость со , обеспечить со < со . I w w3max , IKI I w w3max _ np . Обоснованное этой методикой ужесточение оси ротора не только гарантированно обеспечивает его устойчивую работу в эксплуатации (отсутствуют значительные упругие деформации оси и обусловленные этим дисбалансы), но и значительно снижает трудозатраты балансировки при обеспечении требуемого её качества.
Список литературы Проектная отстройка критических скоростей ротационных агрегатов машин
- Полушкин, О. О. Балансировка нежёстких роторов: монография/О. О. Полушкин. -Ростов-на-Дону: Изд. центр ДГТУ, 2011. -169 с.
- Левит, М. Справочник по балансировке/М. Левит. -Москва: Машиностроение, 1992. -464 с.
- МС ИСО 1940-73. Качество балансировки вращающихся жёстких тел.
