Проектно-баллистический анализ миссии длительного исследования астероида Апофис наноспутником с электроракетной двигательной установкой

Автор: О.Л. Старинова, Е.А. Сергаева, А.Ю. Шорников
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 3, 2020 года.
Бесплатный доступ
В работе рассматриваются объекты несферической формы с малым гравитационным притяжением, например, астероиды, спутники планет и кометы. Рассматривается возможность осуществления миссии к малым телам Солнечной системы неправильной формы на примере астероида Апофис. Авторы статьи предлагают использовать для длительной миссии изучения Апофиса космический аппарат нано-класса с электроракетной двигательной установкой. Целью данной работы является определение необходимых затрат рабочего тела на все этапы миссии, включающей достижение астероида, формирование и поддержание заданной орбиты относительно него. При моделировании управляемого движения космического аппарата учитывается гравитационное притяжение Земли, Солнца и астероида. На этапе движения космического аппарата относительно астероида его гравитационное поле описывается как суперпозиция гравитационных полей двух вращающихся массивных точек. В работе предлагается для предварительного баллистического проектирования миссии разбить ее на два участка. Первый – оптимальный по быстродействию гелиоцентрический перелет Земля – астероид Апофис с выравниванием скорости космического аппарата относительно астероида. Второй – движение в окрестности астероида, включающее оптимальный по быстродействию маневр формирования рабочей орбиты и поддержание рабочей орбиты в течение заданного времени.
Наноспутник, астероид, математическая модель, управление движением, траектория движения, проектно-баллистические характеристики
Короткий адрес: https://sciup.org/14117448
IDR: 14117448 | УДК: 629.785 | DOI: 10.26732/j.st.2020.3.04
Design and ballistic analysis of the mission for long-term study of the asteroid Apophis by a nanosatellite with an electric rocket propulsion system
The paper considers non-spherical objects with low gravitational attraction, such as asteroids, satellites of the planet and comets. We considered possibility of a mission to small bodies of the solar system of irregular shape on the example of the asteroid Apophis. The authors of the article suggest using a nanoclass spacecraft with an electric rocket propulsion system for a long mission to study Apophis. The purpose of this work is to determine the necessary costs of the working body for all stages of the mission, which includes reaching the asteroid, forming and maintaining a given orbit relative to it. The gravity of the Earth, Sun, and asteroid is taken into account when modeling the controlled movement of the spacecraft. When a spacecraft is moving relative to an asteroid, its gravitational field is described as a superposition of the gravitational fields of two rotating massive points. In this paper, it is proposed to divide the mission into two sections for preliminary ballistic design. The first optimal speed heliocentric flight Earth-asteroid Apophis with the alignment of the speed of the spacecraft and the asteroid. The second is the movement in the vicinity of the asteroid, which includes the optimal speed maneuver for forming the working orbit and maintaining the working orbit for a given time.
Текст статьи Проектно-баллистический анализ миссии длительного исследования астероида Апофис наноспутником с электроракетной двигательной установкой
Проблема исследования астероидов давно привлекает внимание ученых и общества [1–11]. В частности, проблема пролета астероида Апофис 99942 на угрожающем Земле расстоянии в 2029 году обсуждалась в работе [3]. Вместе с тем, значительно вырос интерес к длительным исследовательским миссиям, направленным на изучение физических свойств астероидов, комет и спутников планет [4–11], предусматривающих длительное пребывание в окрестности изучаемого тела. Например, в работе [8] приводится краткое описание современных и перспективных космических аппаратов (КА), создаваемых ФГУП «НПО им. С. А. Лавочкина» для фундаментальных исследований Луны, планет и малых тел Солнечной системы, предусматривающих выполнение маневров
в окрестности астероидов, в том числе сближение, посадку и возвращение грунта на Землю.
Вопросы проектирования гелиоцентрических перелетов КА к астероидам, особенно для КА с традиционными двигательными установками, достаточно хорошо исследованы. Например, в работе [12] подробно исследовано оптимальное управление КА с двигателем «большой тяги» для миссии Земля – астероид Апофис – Земля в классе многоимпульсных перелетов. Известно, что для длительных миссий наиболее эффективными, с точки зрения расхода рабочего тела, являются двигательные установки на базе электроракетных двигателей [10; 13–22]. К существенным характерным особенностям таких двигательных установок относятся малая тяга, создающая ускорение, сравнимое с гравитационными ускорениями от малых тел Солнечной системы, и длительное время функционирования (иногда до десяти лет). Поэтому для проектирования миссий с электрора-кетными двигательными установками (ЭРДУ) не-
К1ЛЕ АППАРАТЫ Ш
обходимо учитывать даже малые гравитационные возмущения, что особенно затруднительно для рассматриваемого класса баллистических задач, где уровни ускорений от тяги двигателя сравнимы с гравитационными возмущениями. Работы [15; 16; 19; 20; 22–25] посвящены оптимизации гелиоцентрического движения КА с двигателями «малой тяги», не допускающие использование импульсной постановки задачи.
Значительно слабее исследован вопрос об управлении движением КА в непосредственной близости от малого небесного тела неправильной 162 формы. Поведение КА в таком поле в значительной степени отличается от движения вблизи сфероидальных и эллипсоидальных тел, форма которых в некотором приближении может считаться правильной. Здесь нельзя использовать законы Кеплера и полученные на их основе программы управления. Отсутствие методики формирования программного управления может привести к существенным неопределенностям в определении запаса рабочего тела, необходимого для проведения миссии заданной продолжительности со всеми запланированными исследованиями. Даже поддержание постоянной орбиты у тела с нерегулярным гравитационным полем требует управления и затрат рабочего тела [7; 26–28].
Теоретическую основу исследования составляют работы, описывающие гравитационные поля малых тел Солнечной системы неправильной формы, а также работы о возможном поведении КА в окрестностях таких объектов [7; 26; 27; 29–32]. В данных исследованиях рассматривалась проблема поиска предельно точного способа формализации гравитационного поля астероидов в приложении к планируемым или уже осуществленным исследовательским миссиям, таким как NEAR Shoemaker, Hayabusa 1 и 2, Galileo, Cassini, Rosetta, Deep Space и др.
В качестве предлагаемых способов формализации гравитационного поля исследователями предлагаются следующие модели гравитационного потенциала: разложение потенциала в функциональный ряд (по сферическим, эллиптическим, эллипсоидальным функциям), модель пространственного многогранника и другие методы, основанные на оценке величины и направления гравитационного ускорения, действующего на КА.
Существенным недостатком данных моделей является их оторванность от задач баллистического проектирования и поиска оптимальных схем управления КА. Приведенные модели, в большинстве своем, требуют значительных вычислительных ресурсов и полного набора первоначальной информации о физической природе объекта исследования. На наш взгляд, последнее обстоятель- ство является существенным препятствием при предварительном проектировании миссии, осо-
Том 4
бенно при определении программ управления КА с электроракетными двигателями. Разработчиков реальных миссий к астероидам и кометам [33–35] ставит в затруднение необходимость при использовании этих моделей заранее знать физические свойства еще неизвестного до полета объекта исследования, его геометрию и распределение масс, в том числе внутреннее. В статьях [33–35] описываются значительные трудности при определении программного управления реальными миссиями Dawn и Rosetta. Неточности в определении программ управления при проектно-баллистическом анализе миссий приводили к существенному увеличению затрат рабочего тела на маневрирование, что снижало длительность самой ценной части миссии – собственно исследования небесного тела.
Традиционным подходом к проектированию миссии и проектного облика КА c ЭРДУ является минимизация массы рабочего тела, необходимого для перелета при заданных граничных условиях, определяемых целями исследования [10; 14; 36]. Именно такой подход к проектированию миссии предлагается использовать в данной работе. Для описания гравитационного поля исследуемого астероида предлагается использовать подход, описанный в [28], который позволит сформировать оптимальное программное управление для серии динамических маневров и провести проектнобаллистический анализ миссии в целом.
Проектно-баллистический анализ миссии длительного исследования астероида Апофис наноспутником
В данной работе рассматривается вопрос о реализуемости исследовательской миссии Земля – астероид Апофис, осуществляемой КА нано-класса с ЭРДУ. Предполагается, что КА выводится из сферы действия Земли с нулевым гиперболическим избытком скорости как попутный груз при осуществлении межпланетной миссии. Затем за счет собственной двигательной установки КА совершает гелиоцентрический перелет к Апофису, формирует рабочую орбиту и остается на ней длительное время.
В работе [37] показано, что на базе существующей элементной базы может быть разработан девятиюнитовый КА с начальной массой 9,8 кг, с ЭРДУ с номинальной тягой P = 2,1 мН, скоростью истечения c = 20000 м/c [38] и энергопитанием от панелей солнечных батарей (рис. 1).
В данной работе предлагается для предварительного баллистического проектирования миссии разбить ее на два участка. Первый – оптимальный по быстродействию гелиоцентрический перелет Земля – астероид Апофис с выравнивани- ем скорости КА и астероида. Второй – движение
в окрестности астероида, включающее оптимальный по быстродействию маневр формирования рабочей орбиты и поддержание рабочей орбиты в
течение заданного времени.
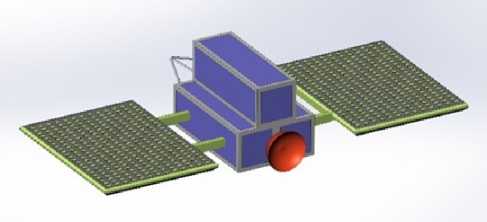
Рис. 1. Проектный облик КА с ЭРДУ нано-класса
существенное влияние на КА оказывает световое давление. В данной работе сделана попытка рассчитать в первом приближении необходимый запас рабочего тела для ЭРДУ и оценить возможность длительной миссии, поэтому возмущающие факторы не учитывались.
Граничные условия первого участка обеспечивают гелиоцентрический перелет КА от Земли к астероиду с выравниванием скорости:
Г3 (t 15 ) = Г4 (t 15 ), Г3 (t 1 f ) = rl(t1 f X r3 (t 15 ) = r4 (t 15 ), r3 (t 1 f ) = rl (tl f ),
На первом участке программа управления была получена с использованием принципа максимума Понтрягина с учетом гравитации Солнца, Земли и астероида (как материальной точки) в гелиоцентрической инерциальной системе координат. Уравнения движения в векторной форме имеют вид [37]:
d2 r1
dt2
-
G ' m SUN
r1
-
G • mSC
r -
(r1 - r3
)
-
-
G • mE
3 r 1 - 4
( r 1 - r 4
) ,
d2 r
dt2
G ' m SUN „ G ' m AST
з----r33-----( r3 - rl r3 rl-3
G • m
--3---(13 - r4 ) + a + f, r3-4
d2r4 dt2
G " m SUN „ G " m AST ------3----r4 3----- ( r4 - r l ) , r 4 r l-4
dmSC dt
—
- 5 P
c
r E
V гз V
, a = — 5e mSC
Г р
V Гз V
.
где t1s – время начала перелета (соответствует дате и времени старта); t1f – время окончания гелиоцентрического перелета. Оптимальное по быстродействию управление, как показано в [14; 16; 25; 37; 41], обеспечивается работой ЭРДУ в течение всего времени движения (δ≡0) и направлением ускорения, доставляющему максимум га-^r мильтониану e = 3 ( Ψ – вектор сопряженных
I Тгз| множителей, соответствующих вектору скорости КА r3 ). Для численного решения краевой задачи (1–5) использовалась методика, описанная в работе [37] и реализованная в программном комплексе [42].
На втором участке движения, в соответствии с методикой [27], гравитационное поле астероида Апофис представляется как суперпозиция полей двух материальных точек массами тзз - ST = 1,539 • 1010 кг и тззл зТ зз 1,161.1010 кг, враща-AST AST ющихся с угловой скоростью собственного вращения астероида ( ω = 5,74 ⋅ 10 -5 1/c) на расстоянии d = 248 м (рис. 2). В [27] было показано, что при использовании такой модели погрешность в определении гравитационного ускорения астероида не превышает 10 % вплоть до поверхности астероида. Кроме астероида учитывалась гравитация Солнца и Земли.
Здесь m SUN , m E , m AST , m SC – массы Солнца, Земли, астероида и текущая масса КА соответственно; r 1 , r 3 , r 4 – радиус-векторы астероида, КА и Земли относительно Солнца; r 1–3 – расстояния между КА и астероидом; r 1–4 , r 3–4 – расстояние от Земли до астероида и КА соответственно; a - ускорение от тяги КА; 5 е{ 1,0} - функция включения-выключения двигателя (1 – двигатель включен, 0 – выключен); e – единичный вектор направления тяги; f – возмущающие ускорения, действующие на КА. В работах [39; 40] проведен анализ динамики орбитального движения КА относительно астероида Апофис с учетом возмущающих факторов, в частности указано, что
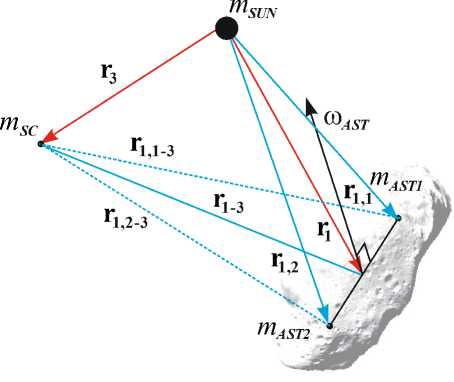
Рис. 2. К моделированию второго участка движения
KI/IE АППАРАТЫ Ш
Том 4
Движение центра масс астероида и Земли по-прежнему будет описываться уравнениями (1) и (3), а уравнение движения КА примет вид:
d r3 _ G • m sun
dt2
—
3 r3
r3
—
G ' m AST1
—
G • m
r 1,2 — 3
( r
—
r 1,2 )
—
3 r 1,1 — 3
G • m E r3—4
( r 3
—
r 1,1 )
—
(гз — Г4) + a + f,
где r 1,1 , r 1,2 – радиус-векторы массивных точек астероида относительно Солнца; r 1,1–3 , r 1,2–3 – расстояния между КА и массивными точками.
Для определения управления на втором
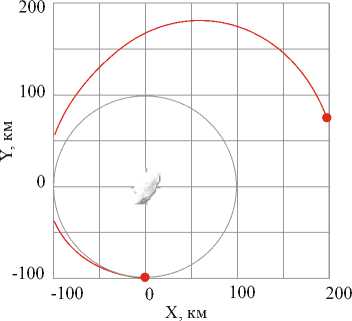
Рис. 4. Траектория формирования заданной орбиты радиусом 100 км
участке движения использовались две различные методики. Для определения управления, предназначенного для формирования заданной орбиты, – методика поиска оптимального по быстродействию управления, описанная в работе [43], а для длительного поддержания заданной орбиты использовался локально-оптимальный закон управления, поддерживающий постоянной большую полуось орбиты [28]. Эти методики полностью автоматизированы и реализованы в программном комплексе [44].
Результаты расчетов по участкам движения представлены в табл. и на рис. 3 (первый участок движения), 4 (формирование рабочей орбиты) и 5 (поддержание рабочей орбиты).

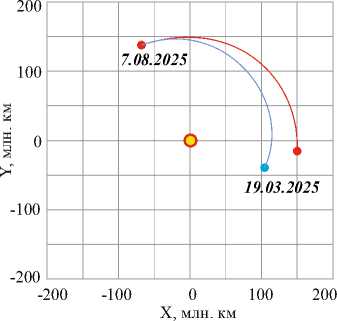
Рис. 3. Траектории КА и астероида на гелиоцентрическом участке движения
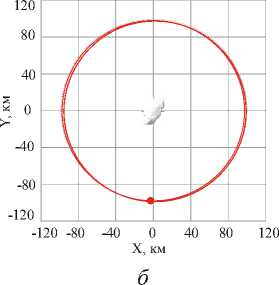
Рис. 5. Изменение траектории КА:
а ) – пассивное движение; б ) – движение под действием стабилизирующего орбиту управления
На рис. 3 траектория КА выделена красным цветом, астероида – синим. Рис. 4 иллюстрирует оптимальную траекторию формирования около-круговой орбиты радиусом 100 км относительно барицентра астероида. Астероид на рис. 4 и 5 показан схематически.
Рис. 5 а демонстрирует поведение КА относительно астероида Апофис без использования постоянно действующего корректирующего ускорения с начальными условиями, соответствующими невозмущенной круговой орбиты, а рис. 5 б – результат применения локально-оптимального управления, направленного на поддержание постоянным эксцентриситета орбиты.
Таблица
Баллистические характеристики участков движения
|
Маневр |
Длительность, сут. |
Расход рабочего тела, кг |
|
Гелиоцентрический перелет |
141,3 |
1,281 |
|
Формирование рабочей орбиты |
4,38 |
3,97·10-3 |
|
Поддержание рабочей орбиты в течение суток |
– |
0,903·10-3 |
Как выяснилось, при длительных миссиях существенная часть рабочего тела расходуется на поддержание рабочей орбиты. Поэтому при предварительном планировании миссии нужно учитывать массу рабочего тела, необходимую на гелиоцентрический перелет и поддержание рабочей орбиты. Например, если считать, что исследования астероида в данной миссии должны продолжаться 10 лет, то на перелет к астероиду будет затрачено 1,281 кг, на формирование рабочей орбиты 3,97 гр., а на поддержание рабочей орбиты 3,29 кг рабочего тела.
Заключение
В статье анализируется проблема управляемого движения космических аппаратов вблизи объектов с нерегулярными гравитационными полями и рассмотрены конкретные баллистические характеристики миссии к астероиду Апофис. Моделирование движения проведено с разделением на два участка – гелиоцентрического движения и движения относительно астероида. Кратко описаны методики определения управления на участках движения и приведены результаты моделирования без учета возмущений, действующих на космический аппарат, и затрат на коррекцию навигационных ошибок. Показано, что с учетом этих допущений, космический аппарат массой 9,8 кг может осуществить задан- 165
ную миссию десятилетнего изучения астероида Апофис, израсходовав около 4,6 кг рабочего тела.
Список литературы Проектно-баллистический анализ миссии длительного исследования астероида Апофис наноспутником с электроракетной двигательной установкой
- Энеев Т. М., Ахметшин Р. З., Ефимов Г. Б. К вопросу об астероидной опасности // Препринты ИПМ им. М. В. Келдыша. 2011. № 35. С. 1–40.
- Медведев Ю. Д., Свешников М. Л., Сокольский Г. А., Тимошкова Е. И., Чернетенко Ю. А., Шор В. А. Астеродно-кометная опасность. СПб. : ИТА РАН, 1996. С. 244.
- Соколов Л. Л., Башаков А. А., Питьев Н. П. Особенности движения астероида 99942 Апофис // Астрономический вестник. 2008. Т. 42. №. 1. С. 20–29.
- Yeomans D. K., Chodas P. W., Keesey M. S., Ostro S. J., Chandler J. F., Shapiro I. I. Asteroid and comet orbits using radar data // Astronomical Journal, 1992, vol. 103, pp. 303–317.
- Шустов Б. М., Нароенков С. А., Емельяненко В. В., Шугаров А. С. Астрономические аспекты построения системы обнаружения и мониторинга опасных космических объектов // Астрономический вестник. Исследования солнечной системы. 2013. Т. 47. №. 4. С. 312–320.
- Geisslera P., Petit J.-M., Durdaa D. D., Greenberga R., Bottkea W., Nolana M., Moore J. Erosion and ejecta reaccretion on 243 Ida and its moon // Icarus, 1996, vol. 120, issue 1, pp. 140–157.
- Scheeres D. J. Orbital mechanics about small bodies // Acta Astronautica, 2012, vol. 72, pp. 1–14.
- Хартов В. В. Новый этап создания автоматических космических аппаратов для фундаментальных научных исследований // Вестник ФГУП НПО им. С. А. Лавочкина. 2011. № 3. С. 3–10.
- Кульков В. М., Егоров Ю. Г., Крайнов А. М., Шаханов А. Е., Ельников Р. В. К вопросу проектирования малых космических аппаратов с электроракетной двигательной установкой для исследования малых тел Солнечной системы // Вестник НПО им. С.А. Лавочкина. 2015. № 1. С. 48–54.
- Кульков В. М., Егоров Ю. Г., Крайнов А. М., Шаханов А. Е., Ельников Р. В. К вопросу проектирования малых космических аппаратов с маршевой электроракетной двигательной установкой для исследования окололунного пространства // Вестник НПО им. С.А. Лавочкина. 2013. № 4. С. 68–74.
- Ломакин И. В., Мартынов М. Б., Поль В. Г., Симонов А. В. К вопросу реализации программы исследования малых тел Солнечной системы // Вестник НПО им. С. А. Лавочкина. 2013. № 4. С. 10–17.
- Ивашкин В. В., Лан А. Анализ оптимальности траекторий экспедиции Земля–астероид–Земля // Препринты ИПМ им. М. В. Келдыша. 2017. № 113. 25 с. doi: 10.20948/prepr-2017-113.
- Полищук Г. М., Пичхадзе К. М. Автоматические космические аппараты для фундаментальных и прикладных научных исследований. М. : МАИ-ПРИНТ, 2010.
- Кульков В. М. Исследование проектных параметров и анализ эффективности применения унифицированных платформ с электроракетными двигателями в составе малых космических аппаратов // Вестник Московского авиационного института. 2012. Т. 19. № 2. С. 18–28.
- Мартынов М. Б., Петухов В. Г. Концепция применения электроракетной двигательной установки в научных космических проектах: преимущества и особенности, примеры реализации // Вестник НПО им. С. А. Лавочкина. 2011. № 2. С. 3–11.
- Власенков Е. В., Комбаев Т. Ш., Крайнов А. М., Черников П. С., Шаханов А. Е. Проектный облик перспективного малого космического аппарата с маршевой электроракетной двигательной установкой // Вестник МАИ. 2012. № 11. С. 33.
- Ахметжанов Р. В., Богатый А. В., Дьяконов Г. А., Попов Г. А. Применение электроракетной двигательной установки на базе высокочастотного ионного двигателя мощностью до 600 Вт для межпланетных космических аппаратов // Известия Российской академии наук. Энергетика. 2019. № 3. С. 14–25.
- Константинов М. С., Орлов А. А. Анализ влияния характеристик энергетической установки при использовании ЭРДУ в проекте исследования Меркурия // Известия Российской академии наук. Энергетика. 2018. № 3. С. 106–118.
- Woolley R., Olikara Z. Optimized Low-Thrust Missions from GTO to Mars // 2019 IEEE Aerospace Conference, 2019, pp. 1–10.
- He S., Zhu Zh. Optimal design of near-Earth asteroid sample-return trajectories in the Sun–Earth–Moon system // Acta Mechanica Sinica, 2016, vol. 32, no. 4, pp. 753–770. doi: 10.1007/s10409-015-0527-1.
- Kulumani S., Lee T. Systematic Design of Optimal Low-Thrust Transfers for the Three-Body Problem // The Journal of the Astronautical Sciences, 2019, vol. 66, no. 1, pp. 1–31.
- Petukhov V. G., Konstantinov M. S., Wook W. S. Simultaneous optimization of the low-thrust trajectory and the main design parameters of the spacecraft // Advances in the Astronautical Sciences, 2017, pp. 639–653.
- Willis M., D'Amico S. Analytical approach to spacecraft formation-flying with low-thrust relative spiral trajectories // Acta Astronautica, 2018, vol. 153, pp. 175–190. doi: 10.1016/j.actaastro.2018.02.002.
- Петухов В. Г., Иванюхин А. В., Вук В. С. Совместная оптимизация управления и основных траекторных и проектных параметров межпланетного космического аппарата с электроракетной двигательной установкой // Космические исследования. 2019. Т. 57. № 3. С. 212–228.
- Петухов В. Г., Попов Г. А. Автоматизация задач вычисления оптимальных траекторий космических аппаратов с электроракетными двигательными установками // Системный анализ, управление и навигация. 2018. С. 109–111.
- Ивашкин В. В., Гуо П. Анализ возможности создания стабильного спутника астероида Апофис как однородного трехосного эллипсоида // Доклады Академии наук. 2019. Т. 489. № 1. С. 27–33.
- Шорников А. Ю., Старинова О. Л. Моделирование гравитационного поля сложной конфигурации // Известия Самарского научного центра Российской академии наук. 2015. Т. 17. № 2–1. С. 167–170.
- Starinova O., Shornikov A., Nikolaeva E. Using the iESP Installed on the Space Station Moving in an Irregular Gravitational Field of the Asteroids Eros and Gaspra // Electrospinning and Electrospraying-Techniques and Applications, 2019. doi: 10.5772/intechopen.85615.
- Ren Y., Shan J. On tethered sample and mooring systems near irregular asteroids // Advances in Space Research, 2014, vol. 54, no. 8, pp. 1608–1618.
- Hu X., Jekeli C. A numerical comparison of spherical, spheroidal and ellipsoidal harmonic gravitational field models for small non-spherical bodies: examples for the Martian moons // Journal of Geodesy, 2015, vol. 89, no. 2, pp. 159–177.
- Ивашкин В. В., Лан А. Анализ орбитального движения спутника астероида Апофис // Космические исследования. 2017. Т. 55. № 4. С. 268–277.
- Wang X., Jiang Y., Gong S. Analysis of the potential field and equilibrium points of irregular-shaped minor celestial bodies // Astrophysics and Space Science, 2014, vol. 353, no. 1, pp. 105–121.
- Grebow D. J., Bradley N., Kennedy B. Stability and Targeting in Dawn’s Final Orbit // Proceedings of the 29th AAS/AIAA Space Flight Mechanics Meeting, 2019, pp. 13–17.
- Grebow D. J., Kennedy B. M., Han D., Whiffen G. J. Design and execution of Dawn HAMO to LAMO transfer at Ceres // AIAA/AAS Astrodynamics Specialist Conference, 2016.
- Kennedy B., Abrahamson M., Ardito A., Han D., Haw R., Mastrodemos N., Nandi S., Park R., Rush B., Vaughan A. Dawn Orbit Determination Team: Trajectory and Gravity Prediction Performance during Vesta Science Phases, 2013.
- Воронцов В. А., Лохматова М. Г., Мартынов М. Б., Пичхадзе К. М., Симонов А. В., Хартов В. В., Засова Л. В., Зеленый Л. М., Кораблев О. И. Перспективный космический аппарат для исследования Венеры. Проект «Венера-Д» // Вестник НПО им. С. А. Лавочкина. 2010. №. 4. С. 62–67.
- Nikolaeva E. A., Starinova O. L., Shornikov A. U., Kiunov Y. S., Chernyakina I. V. Ballistic and Design of Nano-Class Spacecraft for Asteroid Exploration // 9th International Conference on Recent Advances in Space Technologies (RAST), 2019, pp. 89–94.
- Ахметжанов Р. В., Богатый А. В., Дьяконов Г. А., Ким В. П., Меркурьев Д. В., Любинская Н. В., Семенихин С. А., Спивак О. О., Попов Г. А. Электрические ракетные двигатели нового поколения для малых космических аппаратов // Известия Российской академии наук. Энергетика. 2019. № 3. С. 3–13.
- Ивашкин В. В., Лан А. Анализ динамики орбитального движения космического аппарата вокруг астероида Апофис // Актуальные проблемы российской космонавтики: труды XXXIX академических чтений по космонавтике, посвященных памяти академика С. П. Королева и других выдающихся отечественных ученых-пионеров освоения космического пространства. 2015. С. 90–91.
- Лан А. Анализ космических траекторий для экспедиции Земля-Апофис-Земля и движения космического аппарата вокруг астероида Апофис // Инженерный журнал: наука и инновации. 2017. № 7 (67).
- Константинов М. С., Петухов В. Г., Тейн М. Анализ влияния мощности солнечной энергетической установки на характеристики проекта «Интергелио-зонд» при использовании электроракетных двигателей // Известия Российской академии наук. Энергетика. 2016. № 2. С. 102–117.
- Свид. 2018611032 Российская Федерация. Свидетельство об официальной регистрации программы для ЭВМ. Моделирование функционирования систем защиты Земли для преодоления астероидной опасности / О. Л. Старинова, Е. А. Николаева ; заявитель и правообладатель Самарский национальный исследовательский университет имени академика С. П. Королева (RU) ; заявл. 28.11.2017 ; опубл. 22.01.2018.
- Шорников А. Ю. Оптимальное управление движением космического аппарата в поле притяжения астероида Эрос 433 // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2019. Т. 18. № 4. C. 146–156.
- Свид. 2014618472 Российская Федерация. Свидетельство об официальной регистрации программы для ЭВМ. Программный комплекс моделирования и оптимизация перелета космического аппарата с электрореактивным двигателем малой тяги в задачах маневрирования в окрестности тел со сложными гравитационными полями / А. Ю. Шорников, О. Л. Старинова ; заявитель и правообладатель Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет) (RU) ; заявл. 26.06.2014 ; опубл. 21.08.2014.
