Прогнозирование возникновения неисправностей в бортовых энергетических системах космических аппаратов

Автор: Буторин Владислав Владимирович, Жуков Александр Олегович, Жуков Олег Олегович
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2015 года.
Бесплатный доступ
Рассмотрены бортовые системы космических аппаратов, выявлено, что наиболее уязвимой системой из всех является бортовая энергетическая система. Также проведен анализ и обнаружены недостатки существующей системы анализа информации телеконтроля, поступающей с борта космического аппарата. Проанализирован алгоритм действий специалистов при устранении возникающих неисправностей на борту космических аппаратов. Разработана на основе прикладной теории катастроф методика по прогнозированию возникновения неисправностей в наиболее подверженной к изменениям аппаратуре на космическом аппарате - бортовой энергетической системе.
Космический аппарат, бортовая аппаратура, бортовая энергетическая система, неисправности, прикладная теория катастроф, прогнозирование
Короткий адрес: https://sciup.org/148160211
IDR: 148160211 | УДК: 629.7.086;530.1
Forecasting the occurrence of faults in on-board power systems of spacecraft
The authors consider the on-board systems of spacecrafts, and reveal that the most affected system of all of them is on-board energy system. They analyse the shortcomings of the existing system of information analysis of telecontrol signals from the spacecraft, and the algorithm of specialists ’ actions in the elimination occurring failures on-board spacecrafts is analyzed. On the basis of applied catastrophe theory a methodology for predicting malfunctions in the most susceptible to changes in the instrument on the spacecraft side of the energy system is developed.
Текст научной статьи Прогнозирование возникновения неисправностей в бортовых энергетических системах космических аппаратов
За последние десятилетия использование человеком околоземного космического пространства приобретает всё большую активность и значимость. Это связано с особыми преимуществами применения на орбите космических аппаратов (КА): глобальный охват земной поверхности, возможность непрерывного её наблюдения, отсутствие неблагоприятных факторов окружающей среды для наблюдения планет, звезд, комет и ряд других. Также в связи с бурным научно-техническим прогрессом постоянно расширяется спектр возложенных функциональных задач на космические аппараты. Однако отечественные и зарубежные космические аппараты обладают достаточно низкими сроками активного существования. Это приводит к постоянному проведению запусков аппаратов, что в конечном итоге влияет на возрастающую плотность космического мусора на орбитах. Поэтому в настоящее время наиболее актуально стоят вопросы увеличения срока активного существования КА.
Известно, что для гарантированного выполнения КА задач по предназначению необходимо стабильное его энергетическое обеспечение. При этом из всех бортовых обеспечивающих систем наиболее уязвимым к внешним воздействиям являются элементы энергетической системы КА – солнечные батареи и аккумуляторы. Постоянное бомбардирование панелей солнечных батарей метеоритами и космическим мусором вызывает выход из строя их ячеек, что приводит к сниже- нию выдаваемой ими силы тока и влиянию на качество выполнения операций заряда бортовых аккумуляторов.
Также на космический аппарат постоянно воздействуют негативные геофизические факторы – радиационное излучение космического пространства, галактические и солнечные космические лучи и др. [8]. Вследствие своих больших энергий частицы космических лучей способны проникать внутрь электронных устройств, печатных плат, аккумуляторов и солнечных батарей. Постепенно тормозясь и теряя энергию, частица ионизирует окружающее пространство и провоцирует сбои в аппаратуре [1–3]. Эти факторы уменьшают КПД солнечных батарей и аккумуляторов, снижая тем самым сроки активного существования КА.
В настоящее время системы управления космическими аппаратами включают в себя комплексы средств измерений, связи, телеметрического контроля и управления. Задачи управления решаются автоматизированной системой управления (АСУ) КА, в состав которой входит совокупность наземных комплексов управления (НКУ) и бортовых комплексов управления (БКУ) КА [4]. Одним из главных факторов, определяющих оперативность и надежность управления КА, является уровень её автоматизации АСУ КА, который играет значительную роль в осуществлении функций принятия решений по управлению КА в различных условиях и ситуациях.
В АСУ КА непрерывно и круглосуточно выполняется дискретный поток операций, направленный на поддержание заданного уровня целевой функции КА, который можно представить в виде распределения моментов начала выполнения операций на временной шкале. Для выполнения каждой из операций организуется «сеанс управления», на который привлекаются необходимые средства сбора, обработки, хранения и отображения информации. Данные средства на время выполнения сеанса объединяются в технологический контур оперативного управления. Время реакции АСУ КА при принятой технологии выполнения работ составляет десятки минут.
Задачами такого анализа являются:
-
- выявление структуры системы и ее объектов исследования;
-
- определение степени приспособленности системы к эксплуатации и её устойчивость в отношении внешних воздействий;
-
- выявление реальных характеристик бортовых систем и их количественное определение.
Рассмотрим недостатки существующей системы анализа информации, поступающей с борта КА. На основании исследования существую- щих АСУ КА, система анализа информации, поступающей с борта КА, обладает следующими недостатками:
-
1) низкая оперативность сектора управления при рассмотрении возникающих неисправностей или при неожиданном изменении режимов работы БА КА из-за внешних воздействий;
-
2) недостаточная достоверность результатов анализа, проводимого сектором управления на основании полученной информации с КА.
Данные недостатки связаны с низкой оперативностью и недостаточностью информации, поступающей с КА. Если объем информации о работе определенной части БА КА можно считать достаточным, то информация о системах КА, имеющих значительные пространственные характеристики (покрытия, бортовая кабельная сеть, отдельные элементы конструкции, панели солнечных батарей и т.д.), поступает в незначительном объеме.
В настоящее время для повышения оперативности управления внедрены программы, реализующие алгоритмы БКУ КА, которые находятся в его памяти для принятия решений по управлению КА. В этом случае сектор управления взаимодействует с БКУ, непосредственно занимающимся управлением и координированием действий БА КА и КА в целом. Совершенствование и развитие данного метода управления представляется наиболее перспективным за счет повышения автономности БКУ в вопросах принятия решений, то есть увеличения количества задач, решаемых БКУ.
Но ввиду особой важности задач, решаемых КА , и невозможности предвидеть все ситуации, основным решающим звеном управления остается сектор управления. Информация специалисту-аналитику сектора управления представляется в таком виде, который может провоцировать оператора на ошибки:
-
– пропуск информации («пропуск цели»);
– неправильное восприятие информации («ложная тревога»);
– невосприятие информации (т.е. оператор не воспринимает информацию о дефекте как аномальную).
Вышеуказанным ошибкам способствуют:
– большой объем обозначений имен параметров, выводимых специалисту-аналитику, которые он должен понимать, знать их семантику и представлять связь между различными параметрами. При этом необходимо отметить, что число анализируемых параметров достигает нескольких тысяч;
– невозможность отследить всю динамику
ВЕСТНИК 2015
ВЕСТНИК 2015
изменения параметров состояния БА КА за счет последовательного вывода информации;
– узкая направленность существующих Баз Данных и отсутствие единой понятийной Базы Знаний.
Рассмотрим алгоритм действий специалистов при устранении возникающих неисправностях в бортовых системах (НБС).
Из всех видов, выполняемых в АСУ КА и имеющих свою иерархизацию [6], наибольший интерес для исследования представляют операции, направленные на устранение НБС, особенно в энергетических бортовых системах. Данные ситуации возникают либо в случаях внезапного изменения степени выполнения целевой функции КА, либо с появлением факторов, прогнозирующих такое изменение. Как правило, работы, связанные с устранением НБС, являются внеплановыми, срочной категории и связаны с высокой степенью неопределенности как вызывающих их причин, так и требуемых мер и средств для их устранения.
На рис. 1 представлена структурная схема алгоритма действия специалиста-аналитика иерархической системы управления КА при устранении НБС, который представляет следующую последовательность шагов.
Шаг 1. Определение места причины, вызвавшей НБС, с учетом всей совокупности доступных факторов при тесном взаимодействии с Центрами пользователя КС. Данная задача состоит в анализе пространственно-временных соотношений параметров состояния всего комплекса средств КС, включая средства пользователя и средства управления.
Шаг 2. В случае выявления отказа в бортовой аппаратуре производится детальный анализ всех систем КА. В случае выявления отказа в наземных средствах пользователя, дальнейшие действия в системе анализа БА КА прекращаются и информация передается на рассмотрение специалистам, эксплуатирующим данные средства. Ситуация в этом случае относится к категории «сложные» НБС».
Шаг 3. Анализ служебных обеспечивающих систем (подсистем) КА: системы терморегулирования (СTP), системы электропитания (СЭП) и др. с целью определения полноценности их функционирования.
Шаг 4. Анализ работы целевой системы (подсистемы) КА и выяснения степени соответствия признаков НБС техническому состоянию целевой подсистемы КА.
Шаг 5. Выработка рекомендаций в соответствии с полученными материалами анализа.
Шаг 6. Принятие решений по управлению КА в соответствии с ранговыми полномочиями иерархической структуры.
Шаг 7. Реализация принятых решений с помощью средств управления.
Шаг 8. Повторный анализ устранения НБС и пространственно-временных соотношений параметров состояния космической системы с целью проверки результатов принятого решения.
Анализ алгоритма показал:
– алгоритм действий (рис. 1) носит циклический характер и используется до устранения НБС и достижения заданного уровня целевой функции КС, подтвержденной пользователем;
– временные интервалы последовательности операций существующего алгоритма, разработанного на основе технических возможностей средств НКУ, определяются постоянной времени АСУ КА и составляют десятки минут.
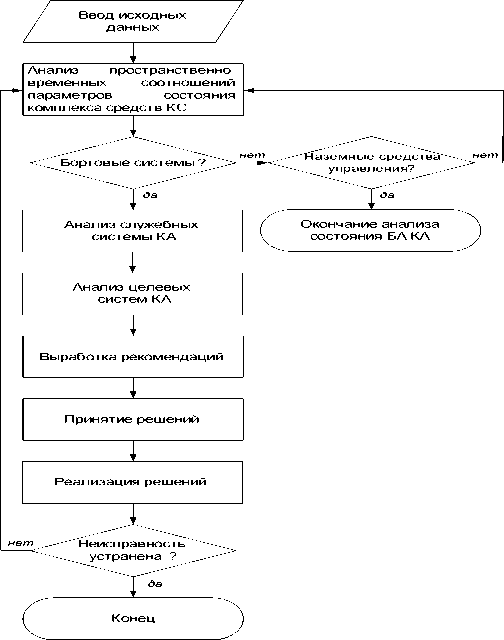
Рис. 1. Структурная схема алгоритма действий специалистов-аналитиков системы управления при устранении НБС
Проведем анализ математической модели системы управления в соответствии с исследовательской программой прикладной теории катастроф [7].
Элементарная теория катастроф изучает вырожденность в семействах отображений F неограниченной области из R n в R m :
F : R n ® Rk ^ R m , где к < 5, n < да , m = 1.
Состояние подсистемы КА описывается, в общем случае, определенной в пространстве R N с координатами x = ( x 1 , x 2 ,..., x N ) системой инте-гродифференциальных уравнений вида:
d V r d У
B r B( v г , c a , t, 1 , 7 2 , ;
dt dt x i ,^,-!^ .-J dx ,-), (1)
∂ x l ∂ x l ∂ x m
1 < i < n, 1 < l, m < N, 1 < a < к, где yr- переменные состояния;
г - индекс информационного объекта;
с а - управляющие параметры;
a - порядковый номер управляющего параметра;
к - максимальное число управляющих параметров;
t - временные показатели;
x l - пространственные координаты;
l - минимальный порядковый номер координаты;
m - максимальный порядковый номер координаты;
N - общее число координат пространства R N ;
n - число уравнений системы.
Проблема исследования решений системы управлений (1) только в зависимости от управляющих параметров с а является сложной задачей. Предполагая, что при рассмотрении задачи можно пренебречь интегральными членами уравнения, получаем уравнения в частных производных, также достаточно сложных для исследования. Дальнейшее упрощение выполняется исключением пространственных производных всех порядков, а также производных по времени выше первого порядка.
В этом случае система уравнений имеет вид:
^У У
B r B( v г ; c a ; t , д , д 2 ,...;) (2)
∂ t ∂ t
Полученная система уравнений по составу членов соответствует компонентам, на основе которых решается задача динамического управления объектами с учетом первой производной управляющих параметров по времени. Однако и эта система уравнений сложна для исследования.
Следующее предположение сводится к тому, что производные первого порядка входят в си- стему уравнений (2) специальным каноническим образом:
B r =у — b r ( V r ; c a ; t ).
∂ t
Систему уравнений такого типа называют динамической системой. Для дальнейшего упрощения динамической системы предполагается, что функция br (3) полностью не зависит от времени. Тогда получаем так называемую автономную динамическую систему уравнений:
B r = У — b r У С С а ) = 0 .
∂ t
Для выполнения эффективного анализа автономных динамических систем введем ограниченное число управляющих параметров к < = 4.
Изучим состояние равновесия динамических систем при ~"~= = 0, которое может быть запи- сано с помощью следующей системы:
d B( V r ; c a ) A ------------= 0.
∂ ψ r
Уравнение (5) может не иметь
( B( у ) = у ), иметь одно ( B( у ) = у 2)
сколько решений ( B( у ; c ) = у 4 + с у 2,
решений или не-
одно ре-
шение, если с > 0, и три решения, если с < 0).
Изучением зависимости состояния равновесия ^у- = 0 и потенциальной функции d b r ( уг ; с а ), изменения управляющих параметров занимается элементарная теория катастроф [7]. Элементарные катастрофы распознаются по неморсовским критическим точкам в семействе потенциальных функций, описывающих данную систему [9].
Исследования представленной модели методами теории катастроф позволяют распознавать «катастрофы» (критические в некотором отношении ситуации) АСУ КА по определенным признакам (флагам катастроф), свидетельствующим об изменениях значений управляющих параметров внутри некоторой области пространства. Флаги катастроф позволяют проследить при изучении поведения систем неожиданные переходы (скачки) в состояния, крайне нежелательные с точки зрения функционирования системы АСУ КА [5], что соответствует процессу «зарождения» НБС в системах управления КА.
Элементарная теория катастроф рассматривает восемь флагов катастроф:
-
1) модальность;
-
2) недостижимость;
-
3) катастрофические скачки;
-
4) расходимость;
-
5) гистерезис;
ВЕСТНИК 2015
ВЕСТНИК 2015
-
6) расходимость линейного отклика;
-
7) критическое замедление/смягчение моды;
-
8) аномальная дисперсия.
Первые пять (модальность, недостижимость, катастрофические скачки, расходимость и гистерезис) обычно встречаются в совокупности. Они зависят от достижимости физической системой области пространства управляющих переменных, в которой потенциал имеет более чем один локальный минимум. Явление гистерезиса может быть ненаблюдаемым, если поведение системы подчиняется принципу Максвелла, однако даже в этом случае иногда возможно наблюдать его с помощью тщательных экспериментальных методов [10]. Остальные три флага катастроф (расходимость линейного отклика, критическое замедление или смягчение моды и аномальная дисперсия) могут наблюдаться даже тогда, когда потенциал имеет всего лишь один локальный минимум. Последнее обстоятельство может быть использовано для установления как критических значений, так и безопасных пределов управляющих параметров в многочисленных случаях, когда неожиданные «катастрофические скачки» могут оказаться гибельными для системы.
Так как элементарная теория катастроф рассматривает, каким образом состояние равновесия ψ r потенциальной функции B ( ψ r ; c α ) изменяется при изменении управляющих параметров c α , то предлагается методы данной теории использовать для прогнозирования зарождения НБС, тем самым повышая уровень автоматизации АСУ КА, оперативность и качество принятия правильных решений по устранению НБС, в особенности в бортовых энергетических системах, что в конечном итоге влияет на срок активного существования КА.
Таким образом, в связи с бурным освоением человеком околоземного пространства активно происходит увеличение мусора на его орбитах. Это связано с нерешенной на настоящий момент проблемой – низкими сроками активного существования КА. В ходе исследований выявлено, что основной системой, влияющей на сроки активного существования КА, а также наиболее уязвимой к внешним воздействиям, является бортовая энергетическая система.
Анализ алгоритма действий специалистов системы управления при устранении неисправностей в бортовых системах КА показал, что для реализации эффективных методов диагностирования и прогнозирования состояния КС необходим новый научно-методический под- ход к организации информационного процесса. Предложенная методика основывается на методах элементарной теории катастроф и позволяет прогнозировать возникновение неисправностей на борту КА, в особенности в его энергетических системах – солнечных батареях и бортовых аккумуляторах, повысить оперативность и качество принятия решений по устранению возникающих неисправностей, тем самым увеличивая сроки активного существования КА.
Список литературы Прогнозирование возникновения неисправностей в бортовых энергетических системах космических аппаратов
- Гобчанский О., Кузнецов Н. Устойчивость IBMPC совместимых контроллеров к радиационным сбоям на орбитах космических аппаратов//Разработки космонавтики, СТА. -2005. -№ 3.
- Безродных И.П., Семёнов В.Т. Ливни релятивистских частиц внутри космических аппаратов типа «Метеор»//Вопросы электромеханики. -2009. -Т. 113.
- Акишин А.И., Новиков Л.С. Космическое материаловедение: энциклопедия МГУ/НИИЯФ им. Д.В. Скобельцына. -М.: МГУ, 2005. -С. 55-64.
- Калинин В.Н., Резников Б.А. Теория систем и управления (Структурно-математический подход): учеб. пособие. -Л., 1988. -417 с.
- Евланов Л.Г. Теория и практика принятия решений. -М.: Экономика, 2002. -176 c.
- Месарович М., Мако Д., Такахара И. Теория иерархических многоуровневых систем/пер. с англ. -М.: Мир, 2001. -344 с.
- Гилмор Р. Прикладная теория катастроф пер. с англ.: в 2-х кн. -М.: Мир, 1999. -Кн. 1 -350 с. -Кн. 2 -285 с.
- Жуков А.О., Захаров А.И., Прохоров М.Е., Мошкалёв В.Г., Шахов Н.И., Зиновьев И.А. Моделирование фона неба в широком спектральном диапазоне в околоземном космическом пространстве//Механика, управление и информатика. -2015. -Т. 7. -№ 2 (55). -С. 235-245.
- Гладышев А.И., Жуков А.О. Методика использования искусственных нейронных сетей с целью идентификации параметров движения летательных аппаратов//Вестник Российского нового университета. -2014. -Выпуск 4: Управление, вычислительная техника и информатика. -С. 149-152.
- Гладышев А.И. Вопросы создания единого информационного пространства в космотехносфере//Вестник Российского нового университета. -2014. -Выпуск 4: Управление, вычислительная техника и информатика. -С. 137-141.
