Программная реализация движения Parrot Ar.Drone 2.0. по пользовательской траектории

Автор: Серебренникова А.А., Сначева К.Г.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 11 (17), 2016 года.
Бесплатный доступ
Сегодня квадрокоптеры все больше и больше входят в нашу жизнь, и не только как детские и подростковые игрушки, но и как инструменты решения тех или иных проблем. Эта статья призвана помочь заинтересованным квадрокоптерами людям научиться самим реализовывать несложные программы взаимодействия с дроном. В статье подробно рассматривается учебный пример реализации движения квадрокоптера по заданной траектории: рассказано как правильно принимать и обрабатывать сетевые команды дрона, предложен и детально разобран алгоритм обработки движения дрона, разработан интерфейс программы для общения с пользователем. В качестве квадрокоптера была выбрана одна из современных моделей - AR.Drone 2.0 Parrot.
Квадрокоптеры, реализация движения квадрокоптера, алгоритм обработки движение дрона
Короткий адрес: https://sciup.org/140267595
IDR: 140267595
Program implementation of the Parrot Ar.Drone 2.0. movement on a custom path
Today quadcopters become part of our lives, and not only as kids and teens toys, but as tools to solve certain problems. This article aims to help interested people to learn how to implement simple programs of interaction with the drone. The article focuses on a case study of the implementation of the quadcopter movement on a given trajectory: it is told how to take and handle network commands, proposed and discussed in detail the processing algorithm of the drone movement, developed interface to communicate with the user. As a quadrocopter it was taken one of the modern models - AR.Drone 2.0 Parrot.
Текст научной статьи Программная реализация движения Parrot Ar.Drone 2.0. по пользовательской траектории
-
• Через порт 5554 квадрокоптера по протоколу UDP происходит инициализация канала связи для передачи по нему навигационных данных(статус работы, высота и скорость полета, направление и другое).
-
• С портов 5559 и 5555 дрона по протоколу TCP происходит передача конфигураций и видеопотока с одной из камер соответственно.
-
• Управление осуществляется через UDP-порт 5556. На него передаются так называемые AT-команды, в которых и заложены непосредственные инструкции для квадрокоптера.
Каждая AT-команда представляет собой строку, оканчивающуюся символом конца строки и имеющую следующую конструкцию:
AT*[имя команды]=[порядковый номер][параметр 1, параметр 2…]
Ниже приведены названия команд, используемых в данной работе и их назначение.
-
• REF - базовые действия: взлет, посадка, аварийное выключение и перезапуск. Параметры: число, соответствующее конкретному действию.
-
• PCMD - передвижение дрона во время полета. Параметры: служебный флаг, крен, тангаж, рыскание, газ.
-
• FTRIM - сообщает дрону о том, что тот находится в горизонтальном положении, для его ориентации в пространстве во время дальнейшего полета. Параметры: нет.
Требуется следить за порядковыми номерами при передаче команд. Дрон обработает инструкцию только в том случае, если номер новой команды больше номера предыдущей.
Была разработана программа на С/С++, позволяющая отправить дрон в полет по нарисованной пользователем траектории. Цикл работы программы продемонстрирован на UML-диаграммe(рис.2).
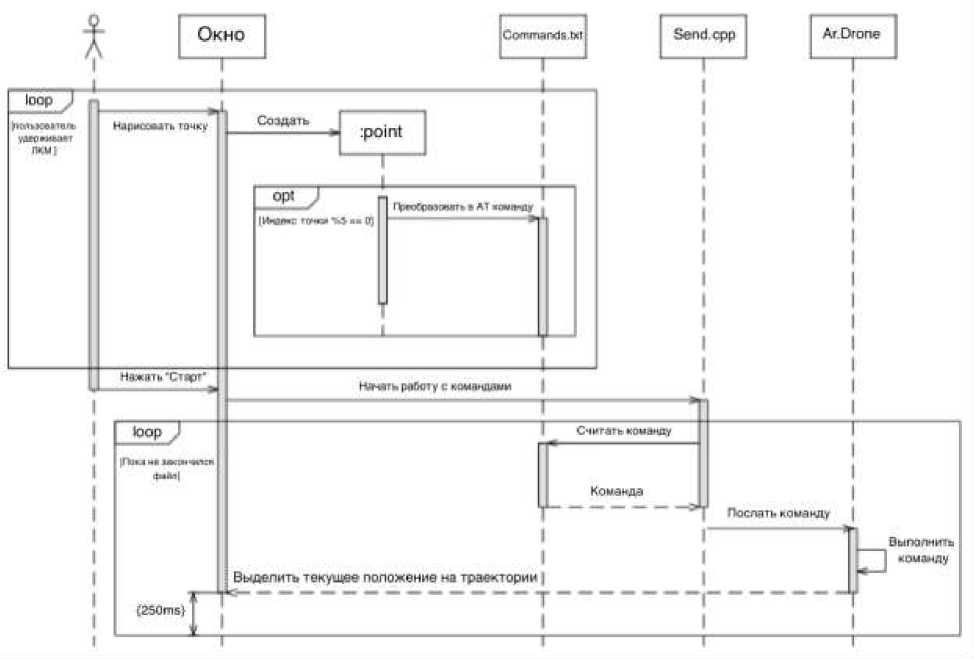
Рис. 2. UML-диаграмма работы программы.
Для передачи AT-команд используются сокеты. Сокет открывается при инициализации объекта класса квадрокоптера. Для каждой команды предусмотрен отдельный метод, использующий ранее открытый сокет для передачи пакета.
Значения большинства параметров задаются с помощью IEEE-754 – стандарта, описывающего формат представления чисел с плавающей точкой.
В программе предусмотрены следующие действия с квадракоптером: Взлет:
Формат AT-команды: AT*REF= [порядковый номер],290718208.
290718208 – число, соответствующее взлету в команде REF.
Дрон поднимается на 1 метр над поверхностью. Для предотвращения конфликтов с последующими командами задается задержка программы на 7 секунд.
Листинг открытия сокета и метода взлета приведены ниже, а их алгоритм описан на рис. 3. Остальные методы реализованы схожим образом: class Drone{ public:
int i;
struct sockaddr_in receiver_addr;
int sock_fd;
char droneBuf[50];
Drone() { i = 1;
sock_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP); receiver_addr.sin_family = AF_INET;
if (inet_aton( "192.168.1.1", &receiver_addr.sin_addr ) == 0) { close(sock_fd);
return;
} receiver_addr.sin_port = htons( PORT );
} void droneTakeOff() { sprintf(droneBuf,"AT*REF=%u,290718208\r",i++);
sendto(sock_fd, droneBuf, 50, 0,(struct sockaddr*)&receiver_addr, sizeof(receiver_addr));
std::cout << "away from land" << std::endl;
sleep(7);
}
// …
}
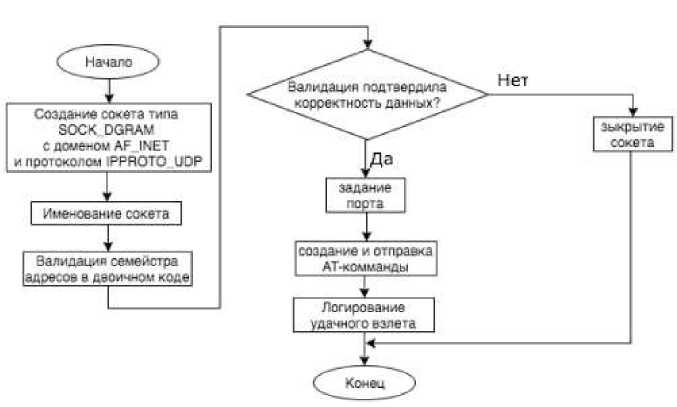
Рис. 3. Алгоритм открытия сокета и взлета.
Калибровка:
Формат АТ-комманды: AT*FTRIM=[порядковый номер].
Вызывается перед взлетом для правильной ориентации дрона в пространстве.
Посадка:
Формат АТ-команды: AT*REF= [порядковый номер],290717696.
290717696 – число, соответствующее посадке в команде REF.
Движение вперед:
Формат AT-команды: AT*PCMD=[порядковый номер],1,0,-
1082130432,0,0.
Число -1082130432 соответствует исходному числу -1, что означает, что выставлен минимальный тангаж и дрон полетит вперед в горизонтальной плоскости. Служебный флаг установлен в 1, как и для всех действий, связанных с движением. Значения крена, рысканья и газа установлены в 0. Перед обращением к дрону вычисляется количество необходимых вызовов АТ-команды.
Повороты влево и вправо:
Форматы АТ-команд:
Поворот влево: AT*PCMD=[порядковый номер],1,0,0,0,-1090519040
Поворот вправо: AT*PCMD=[порядковый номер],1,0,0,0, 1056964608
Числа -1090519040 и 1056964608 соответствуют -0,5 и 0,5, т.е. команды поворота влево и вправо отличаются только значениями рыскания. Данные числа определяют угол поворота в 15 градусов. Значение тангажа, крена и газа установлены в 0.
На вход модулю, отвечающему за обработку координат, принятых от клиентского приложения, подаются координаты в таком виде: сначала количество координат, которые нужно обработать, затем сами координаты (первая по X, вторая по Y). После записи всех координат в массив struct point { data_t x;
data_t y;
};
typedef point point_t;
point_t* arr_crd = new point_t[qty_crd];
for (int pos = 0; pos < qty_crd; pos++) { std::cin >> arr_crd[pos].x >> arr_crd[pos].y;
} происходит взлет квадрокоптера с помощью функции droneTakeOff() из класса Drone.
Обработка координат. Как только дрон взлетел, все его дальнейшие перемещения будут описаны в двух координатных осях – ОХ и OY. Для работы с осями следует назначить дрону, после того как он взлетит, начальное значение координат и начальный основной вектор движения. Основной вектор движения – это направленный отрезок, находящийся под углом α относительно положительной полуоси абцисс единичной окружности. Для обозначения на плоскости вектора в данной работе достаточно знать только угл α , им и будем обозначать основной вектор движения. Однако вектор будет обозначен не всеми значениями угла α, а только кратными 15-ти. Данная погрешность допустима в рамках целей использования квадрокоптера.
Следовательно, обозначение вектора лежит в диапазоне [0, 15, 30, … , 330, 345, 360], где крайние, включенные в диапазон значения обозначают один и тот же вектор.
Начальные значения могут быть выбраны любыми, так как вся дальнейшая работа будет связана исключительно с их разностями (дельтами). Для удобства были выбраны координаты (0, 0) и основной вектор движения – ось координат OY.
Для корректной обработки каждой координаты нужно посчитать два измерения:
-
1. Как изменится основной вектор движения дрона относительно прошлой координаты.
-
2. Насколько дрон нужно переместить вперед в пространстве.
Изменение основного вектора движения дрона. Рассмотрим функцию:
void turn(int curent_drone_vector, int need_drone_vector, drone Ardrone) { int delta_angle = need_drone_vector - curent_drone_ vector;
Ardrone.droneRotateRight(pos);
}
Где curent_drone_vector – обозначение текущего вектора основного движения дрона, need_drone_vector – нужный вектор, delta_angle – угл, на который нужно повернуть дрон, чтобы изменить его основной вектор движения с текущего на нужный, droneRotateRight(х) – функция из класса Drone, которая поворачивает дрон на х градусов направо, droneRotateLeft(х) – налево.
В функции turn() обрабатывается 5 событий:
-
1. Если delta_angle > 0 и delta_angle <= 180, то поворачиваем направо на delta_angle градусов.
-
2. Если delta_angle > 180, то поворачиваем налево на 360 -
- abs(delta_angle), где abs(х) – функция взятия модуля от х.
-
3. Если delta_angle < 0 и delta_angle >= -180, то поворачиваем налево на abs( delta_angle).
-
4. Если delta_angle < -180, то поворачиваем направо на 360 -abs( delta_angle ).
-
5. Если curent_drone_vector = need_drone_vector , то не поворачиваем никуда.
Перемещение дрона вперед в пространстве. Существуют “простые” и “сложные” случаи. Под “простыми” подразумевается, что delta_x = 0 или delta_y = 0 , где delta_x – разность между текущей и следующей координатой дрона по оси ОХ, delta_y – по OY.
Рассмотрим 4 “простых” случая:
-
1. Если delta_x == 0 и delta_y > 0, то вызываем функции
-
2. Если delta_x == 0 и delta_y < 0, то turn(curent_drone_angle, 180 , Ardrone) и Ardrone.droneForward(abs( delta_y )).
-
3. Если delta_x > 0 и delta_y == 0, то turn(curent_drone_angle, 90 , Ardrone) и Ardrone.droneForward( delta_x ).
-
4. Если delta_x < 0 и delta_y == 0, то turn(curent_drone_angle, 270 , Ardrone) и Ardrone.droneForward(abs( delta_x) ).
turn(curent_drone_angle, 0 , Ardrone) и
Ardrone.droneForward( delta_y ), где droneForward(х) - функция из класса Drone , которая двигает дрон на x единиц вперед.
Для рассмотрения “сложных” случаев понадобится функция, которая находит текущее положение вектора - find_drone_vector(int opposite_leg, int adjacent_leg). opposite_leg – противолежащий катет треугольника, образованного соединением текущей координаты со следующей и достраиванием delta_x и delta_y. adjacent_leg – прилежащий катет этого же треугольника. В зависимости от ситуации прилижащим катетом будет либо delta_x, либо delta_y, это же касается и противолежащего катета. Рассмотрим код функции:
int Find_drone_vector(int opposite_leg, int adjacent_leg) { double angle = asin(abs(opposite_leg) / sqrt(adjacent_leg * adjacent_leg + opposite_leg * opposite_leg)); // теорема пифагора angle = 180 * angle / pi; // перевод из радиан int integer_angle = angle / 15; // целая часть return (integer_angle + 1) * 15;
}
Рассмотрим 4 “сложных” случая:
-
1. Если delta_x > 0 и delta_y > 0, то
-
2. Если delta_x > 0 и delta_y < 0, то
-
3. Если delta_x < 0 и delta_y < 0, то turn(curent_drone_angle, Find_drone_vector( delta_x , delta_y) + 180 , Ardrone); int f = sqrt(delta_y * delta_y + delta_x * delta_x);
-
4. Если delta_x < 0 и delta_y > 0, то turn(curent_drone_angle, Find_drone_vector( delta_y , delta_x) + 270 , Ardrone); int f = sqrt(delta_y * delta_y + delta_x * delta_x);
turn(curent_drone_angle, Find_drone_vector( delta_x , delta_y), Ardrone);
int f = sqrt(delta_y * delta_y + delta_x * delta_x); //Теорема пифагора
Ardrone.droneForward(f);
turn(curent_drone_angle, Find_drone_vector( delta_y , delta_x) + 90 , Ardrone); int f = sqrt(delta_y * delta_y + delta_x * delta_x);
Ardrone.droneForward(f);
Ardrone.droneForward(f);
Ardrone.droneForward(f);
Рассмотрим пример. Допустим, начальные координаты дрона указаны как (1, 3) (Рис. 4). Начальное обозначение основного вектора движения – 0.
Перваю смену координат (1,3) -> (2,3) описывает “простой” случай №3: Поворачиваем дрон на 90 градусов направо и двигаемся вперед на delta_x = 1.
Вторую смему координат (2,3) -> (3,1) описывает “сложный” случай №2: Find_drone_vector() вернет 75. Следовательно нужное обозначение вектора = 75 + 90 = 165. Функция turn() вызывается со следующими параметрами – turn(90, 165, Ardrone), что означает поворот направо на 75 градусов.
Далее двигаемся вперед на sqrt((-2) * (-2) + 1 * 1)
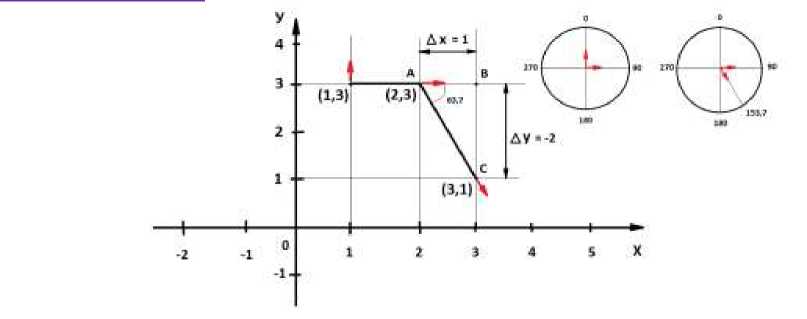
Рис. 4. Траектория движения дрона.
Взаимодействие с пользователем. Для создания интерфейса пользователя(Рис. 5) в качестве среды разработки был выбран Qt Designer. Библиотека Qt в числе прочих содержит множество графических элементов, удобных с точки зрения как разработки, так и эксплуатации программы.
Особенностью Qt является использование системы сигналов и слотов, что находит наибольшее применение именно в графических интерфейсах. Данный подход подразумевает, что компоненты приложения посылают некоторую информацию о событиях(сигналы) и могут принимать и обрабатывать сигналы от других компонентов с помощью своих методов, помеченных как слоты.
С точка зрения пользователя, взаимодействие с дроном выглядит следующим образом:
-
1. Пользователь нажимает ЛКМ и, не отпуская ее, рисует произвольную линию.
-
2. Пользователь отпускает ЛКМ.
-
3. Пользователь нажимает кнопку “Start”.
-
4. Дрон поднимается в воздух и начинает движение по линии от первой нарисованной точки.
-
5. Каждый раз, когда дрон пролетает небольшой участок линии, соответствующая точка помечается красным, а ее координаты выводятся в текстовое поле рядом с полем для рисования.
-
6. Пролетев всю траекторию, дрон опускается на землю.
Пользователь может очистить поле для рисования с помощью кнопки “Clear” или отправить дрон по уже пройденной траектории.
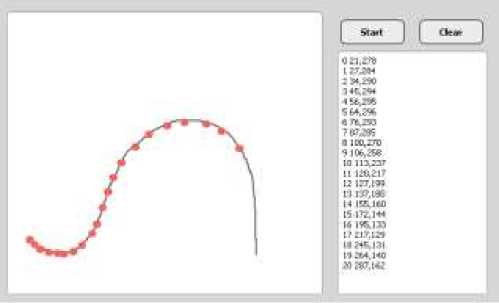
Рис.5. Интерфейс пользователя.
Основной объект в интерфейсе – поле для рисования – создан на основе класса QGraphicsScene. Контейнером для данного поля является объект класса QGraphicsView.
Для определения актуальных размеров графической сцены при запуске программы и изменении размеров окна устанавливается таймер(объект QTimer) на 100 миллисекунд. Задержка необходима, так как непосредственно в момент события изменения размеров окна(resizeEvent) ширина и высота еще не принимают новых значений.
Для осуществления процесса рисования переопределены два события QGraphicsScene: mousePressEvent(событие нажатия ЛКМ) и mouseMoveEvent(событие, сообщающее о том, что мышь сдвинута при зажатой ЛКМ).
При нажатии ЛКМ перехватываются координаты точки, в которой пользователь нажал на кнопку, и вокруг них отрисовывается круг диаметром 2 пикселя. Координаты сохраняются в переменную previous_point. При движении мыши считываются координаты следующей точки, и проводится линия толщиной 2 пикселя между новой точкой и точкой с координатами из previous_point. В previousPoint записываются новые координаты. Данные действия повторяются, пока пользователь не закончит рисование.
Когда дрон достигает очередной точки из массива points, вызывается пользовательское событие pointReachEvent. Соответствующий слот pointReached обеспечивает уведомление пользователя о проделанном пути с помощью выделения достигнутой точки красным(рисуется красный круг диаметром 10 пикселей).
Рядом с полем для рисования находится текстовое поле(объект QTextView), в которое при возникновении pointReachEvent записываются координаты достигнутой точки.
Вывод. Представленная программа ориентирована на эксплуатацию в развлекательных целях, однако может быть полезна и в других областях. С помощью данной программы можно организовать предсказуемое взаимодействие между несколькими квадракоптерами, получить контроль над дроном в условиях плохой видимости(если местность заранее хорошо известна) и другое. Применение программы ограничено фантазией конечного пользователя.
Список литературы Программная реализация движения Parrot Ar.Drone 2.0. по пользовательской траектории
- Stephane Piskorski, Nicolas Brulez, Pierre Eline, Frederic D`Haeyer. AR.Drone Developer Guide, 2012.
- Официальный сайт QT. Режим доступа: http://doc.qt.io/qt-5/qtdesigner-manual.html (дата обращения 22.10.2016).
- Robot App Store. Available at: http://www.robotappstore.com/Knowledge-Base/How-to-Program-ARDrone-Remotely-Over-WIFI/96.html (accessed 22.10.2016).
- Wikipedia, The Free Encyclopedia. Available at: https://en.wikipedia.org/wiki/Parrot_AR.Drone (accessed 22.10.2016).
- Stephane Piskorski, Nicolas Brulez, Pierre Eline, Frederic D`Haeyer. AR.Drone Developer Guide, 2012.
- Официальный сайт QT. Режим доступа: http://doc.qt.io/qt-5/qtdesigner-manual.html (дата обращения 22.10.2016).
- Robot App Store. Available at: http://www.robotappstore.com/Knowledge-Base/How-to-Program-ARDrone-Remotely-Over-WIFI/96.html (accessed 22.10.2016).
- Wikipedia, The Free Encyclopedia. Available at: https://en.wikipedia.org/wiki/Parrot_AR.Drone (accessed 22.10.2016).
