Программная реализация гибридной FIS-NN-модели для оценки состояния сетевого канала на основе телеметрических данных

Автор: Гололобов А.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Сети связи и мультисервисные услуги
Статья в выпуске: 4 (92) т.23, 2025 года.
Бесплатный доступ
В работе представлен программный комплекс для оценки состояния сетевого канала на основе гибридной модели FIS-NN, объединяющей преимущества нечеткого логического вывода и многослойной нейронной сети. Разработанный прототип реализует полный цикл обработки телеметрических данных, включая импорт логов, предобработку параметров трафика, формирование первичной оценки средствами FIS и ее последующую нейросетевую коррекцию. Программная архитектура включает модули импорта, нормализации данных, вычисления гибридной оценки, условного выбора маршрута и визуализации результатов. Проведено экспериментальное исследование поведения системы при различных сценариях нагрузки, подтверждающее устойчивость гибридной модели к шумовым возмущениям и повышение точности классификации состояний канала по сравнению с пороговыми схемами. Программный прототип может служить основой для интеграции в эксплуатационные системы мониторинга и управления параметрами QoS в телекоммуникационных сетях.
Нечеткая логика, FIS, нейронные сети, гибридные модели, интеллектуальный анализ трафика, QoS, телеметрия, MATLAB, оценка состояния канала, FIS–NN, маршрутизация, сетевые перегрузки
Короткий адрес: https://sciup.org/140314009
IDR: 140314009 | УДК: 621.391 / 004.89 | DOI: 10.18469/ikt.2025.23.4.02
Software implementation of a hybrid FIS–NN model for network channel state assessment using telemetry data
This article presents a software framework for assessing the state of a network communication channel using a hybrid FIS–NN model that combines fuzzy inference with a multilayer neural network. The developed prototype implements a complete processing pipeline for telemetry data, including log import, traffic parameter preprocessing, initial evaluation via a fuzzy inference system, and subsequent neural-network-based refinement. The software architecture comprises modules for data import, normalization, hybrid evaluation, conditional route selection, and visualization. Experimental studies conducted under various load scenarios confirm the robustness of the hybrid model to noise disturbances and demonstrate improved classification accuracy compared to threshold-based approaches. The proposed software prototype can serve as a foundation for integration into operational monitoring systems and QoS management frameworks in modern telecommunication networks.
Текст научной статьи Программная реализация гибридной FIS-NN-модели для оценки состояния сетевого канала на основе телеметрических данных
Современные телекоммуникационные сети характеризуются высокой динамичностью процессов передачи данных и существенной вариативностью параметров трафика [1]. На состояние сетевого канала одновременно влияют загрузка оборудования, особенности протоколов транспортного уровня, распределение пользовательской активности, а также переходные процессы на канальном и физическом уровнях [2]. В результате формируются выраженные нелинейные зависимости между параметрами трафика, что затрудняет использование классических пороговых и линейных методов анализа.
Системы мониторинга, основанные на статических порогах, удобны в эксплуатации, однако малоэффективны при быстрых изменениях условий работы сети, поскольку не учитывают совместное влияние нескольких параметров и характеризуются повышенной чувствительностью к шумовым возмущениям [3]. Нейросетевые методы демонстрируют высокую аппроксимирующую способность, но подвержены переобучению и требуют значительных объемов репрезентативных данных [4]. Нечеткие системы вывода обеспечивают интерпретируемость и устойчивость к неопределенности входной информации, однако их параметры часто нуждаются в дополнительной адаптации под конкретные эксплуатационные сценарии [5].
В этих условиях актуальной является задача разработки программного инструмента, который объединял бы интерпретируемость нечеткой логики и адаптивность нейронных сетей, обеспечивая устойчивую и достаточно точную оценку состояния сетевого канала по телеметрическим данным [6]. При этом требуется не только построение математической модели, но и реализация программного комплекса, поддерживающего загрузку и обработку логов, нормализацию параметров, визуализацию результатов и выполнение вычислений на основе гибридного алгоритма.
Целью настоящей работы является разработка и экспериментальная апробация программного комплекса для оценки состояния сетевого канала на основе гибридной модели FIS-NN, объединяющей нечеткий логический вывод и многослойную нейронную сеть [7]. Разрабатываемый комплекс реализует полный цикл обработки телеметрических данных: импорт журналов наблюдений, автоматическую предварительную обработку, вычисление интегральной оценки состояния канала и визуализацию временных рядов и поверхностей решений. В исследовании рассматриваются вопросы структуры программного модуля, алгоритмические особенности вычислительного ядра, а также проводится экспериментальная оценка корректности работы прототипа.
Предлагаемая программная реализация ори-

ентирована на последующую интеграцию в эксплуатационные среды и может быть использована как элемент систем поддержки принятия решений для управления параметрами QoS, анализа перегрузок и выявления нештатных состояний сетевых каналов.
Постановка задачи программной реализации
Задача разработки программного комплекса формулируется как создание прототипа, обеспечивающего практическую реализацию гибридной FIS-NN-модели и позволяющего проводить воспроизводимые численные эксперименты над телеметрическими данными сетевого трафика [8]. В отличие от чисто математической постановки, программная реализация должна обеспечивать устойчивое функционирование на различных наборах данных, автоматическую обработку входных логов и визуальный контроль вычислительных результатов. Модель должна функционировать как единый вычислительный модуль, пригодный для дальнейшего расширения и интеграции в эксплуатационные системы.
Ключевые функциональные требования включают поддержку импорта телеметрических данных, автоматизированную предварительную обработку, вычислительное ядро гибридной системы, визуализацию результатов и формирование отчетных данных [9]. Минимальный набор входных параметров включает нормированную загрузку канала Load и среднюю задержку доставки пакетов Delay; при необходимости дополнительно могут использоваться параметры Jitter, Loss или TCP-метрики. Для обеспечения корректной работы модели требуется унифицированная структура входного файла, определяющая имена полей, типы данных, формат временных меток и допустимые диапазоны параметров. Пример формализованной структуры телеметрического файла, используемого в программном комплексе, приведен в таблице 1.
Важной частью постановки задачи является автоматизация этапа предварительной обработки данных [10]. Программный модуль должен выполнять фильтрацию выбросов, проверку корректности временных интервалов, приведение единиц измерения к единому формату, нормализацию параметров в диапазон [0;1] и формирование обучающей и тестовой выборок. Предусматривается возможность выбора методов нормализации (линейная, робастная, по квантилям), что позволяет адаптировать систему под различные условия эксплуатации.
Вычислительное ядро комплекса включает программную реализацию гибридной модели FIS-NN [11]. Нечеткая подсистема обеспечивает первичное нелинейное отображение параметров Load и Delay в интегральную оценку состояния канала Priority_FIS, используя набор правил типа Мамдани и треугольные функции принадлежности. Далее нейросетевая часть выполняет корректировку этой оценки, формируя итоговый показатель Priority, устойчивый к шумам и адаптируемый к структуре данных. Программно это реализуется в виде каскадного вызова компонентов FIS и NN, при котором выход первого блока используется в качестве дополнительного входа второго.
Таблица 1. Структура входного файла телеметрических данных
|
Поле |
Тип данных |
Назначение |
|
timestamp |
строка (ISO 8601) |
временная метка интервала наблюдения |
|
Load |
число, [0;1] или % |
загрузка канала, доля использованной пропускной способности |
|
Delay |
число, мс |
средняя задержка доставки пакетов |
|
Jitter (опц.) |
число, мс |
вариация задержки в пределах интервала |
|
Loss (опц.) |
число, % |
доля потерянных пакетов |
|
Flags (опц.) |
строка |
технические флаги, метки аномалий |
Для демонстрации прикладного характера модели в программный комплекс включается режим условного выбора маршрута или профиля качества обслуживания (QoS). Логика выбора основана на пороговых значениях Priority, что позволяет имитировать принцип работы систем управления трафиком. Такое поведение полезно для исследований стратегий распределения нагрузки и анализа перегрузок каналов связи.
Завершает постановку задачи требование к формированию отчетных данных. Программный модуль должен автоматически формировать выходные графики временных рядов, поверхности решений FIS и FIS-NN, распределения ошибок, а также сохранять числовые метрики (MSE, MAE, точность классификации) и рекомендации по состоянию канала. Это необходимо как для внутренней валидации работы прототипа, так и для последующего включения результатов в лабораторные и научные публикации.
Таким образом, формальное описание задачи задает структуру программного комплекса и определяет состав вычислительных и вспомога- тельных модулей, обеспечивая возможность систематической экспериментальной проверки реализации гибридной FIS-NN-модели.
Архитектура и функциональные модули программного комплекса
Разрабатываемый программный комплекс реализуется в среде MATLAB с использованием пакетов Fuzzy Logic Toolbox и Neural Network Toolbox, что позволяет одновременно опираться на формализованные методы построения нечетких систем и зрелые алгоритмы нейросетевого обучения [12]. Такой выбор обеспечивает высокую степень воспроизводимости экспериментов, а также потенциальную возможность экспорта кода в языки C/C++ или Python через инструменты MATLAB Coder и MATLAB Compiler для последующей интеграции в Linux-окружение или встраивания в сетевые программно-аппаратные платформы.
С архитектурной точки зрения комплекс строится как модульная система, в которой каждый функциональный блок отвечает за строго определенный этап обработки данных или вычислений [13]. Такая организация позволяет упростить отладку и модернизацию, а также обеспечить независимое тестирование каждого модуля. Логический поток данных реализуется последовательно: от ввода и фильтрации телеметрических данных до формирования итоговой оценки состояния канала и генерации отчетных материалов.
На входе комплекса располагается модуль импорта данных, отвечающий за чтение логов телеметрии в форматах CSV/TSV или JSON, проверку корректности структуры файла, сопоставление полей с внутренними именами и автоматическую конвертацию единиц измерения (например, перевод процента загрузки в нормированный диапазон). Следующим этапом является модуль предварительной обработки, включающий фильтрацию выбросов на основе робастных статистик, линейную или квантильную нормализацию параметров в диапазон [0;1] и разбиение данных на обучающую, валидационную и тестовую выборки. Данный модуль реализует ключевую задачу подготовки данных в виде калиброванного входного массива, обеспечивая корректность последующих вычислений.
Вычислительное ядро комплекса состоит из двух независимых, но тесно связанных подсистем. Первая – модуль FIS-вывода, в котором реализованы треугольные функции принадлежности для входных параметров Load и Delay, а также база правил полного покрытия, построенная по типу Мамдани. Нечеткая подсистема формирует первичную интегральную оценку Priority_fis, от- ражающую общую неблагоприятность состояния канала. Вторая – это модуль нейросетевой коррекции, реализующий многослойный перцептрон архитектуры 210101 с функциями активации tansig в скрытых слоях и линейным выходным нейроном. Нейросеть обучается на нормированных данных и, при выбранной каскадной схеме, использует FIS-оценку в качестве дополнительного входа, что позволяет повысить устойчивость модели и повысить точность по сравнению с чистой нейронной архитектурой.
Выход нейронной сети направляется в модуль условного выбора маршрута (Decision Engine), который сопоставляет значение Priority одному из дискретных состояний: «норма», «предупреждение», «перегрузка». Это позволяет имитировать поведение систем динамического управления трафиком и формирует основу для будущей интеграции прототипа в сетевые маршрутизаторы либо в SDN-контроллеры.
Логическая организация программного комплекса представлена на рисунке 1, где показана последовательность обработки телеметрических данных и взаимодействие ключевых модулей. Диаграмма иллюстрирует, что поток данных проходит через шесть основных этапов: импорт файла телеметрии, предварительную обработку, вычисление первичной оценки в FIS-подсистеме, нейросетевую коррекцию, принятие решений и финальную визуализацию результатов. Каждый блок на схеме отражает отдельный функциональный модуль, а стрелки указывают направление передачи данных и порядок операций. Такая структурная декомпозиция демонстрирует принцип каскадной обработки, обеспечивающий последовательное преобразование входных параметров в итоговую оценку состояния канала и рекомендации по маршрутизации (рисунок 1).
Для более строгого описания архитектуры программного обеспечения используется UML-представление компонентного уровня, изображенное на рисунке 2. Диаграмма отражает структуру программного комплекса FIS-NN в виде набора взаимосвязанных модулей, каждый из которых выполняет строго определенную функцию: импорт данных, предварительную обработку, вычисление FIS-оценки, нейросетевую коррекцию, принятие решений и визуализацию результатов. На диаграмме показаны не только границы модулей, но и направления потоков данных, а также зависимости между компонентами, что позволяет формализовать взаимодействие подсистем и определить их интерфейсы. Такой формат особенно полезен при планировании переноса ре- ализации на другие языки программирования и при переходе к объектно-ориентированной архитектуре (рисунок 2).
Особое внимание уделяется организации взаимодействия между подсистемами FIS-вывода и нейросетевой коррекции. В программном комплексе предусмотрены два возможных варианта интеграции: параллельный и каскадный. В параллельной схеме нейронная сеть обучается исключительно на входных параметрах Load и Delay, без использования FIS-оценки, что обеспечивает высокую гибкость, но снижает, при этом, качество интерпретируемости модели. В каскадной схеме выход FIS дополнительно подается на вход нейросети и выступает структурным ограничителем целевой функции, что способствует получению более устойчивых поверхностей решений и снижает чувствительность к шумовым возмущениям. Возможность переключения между схемами делает программный комплекс гибким инструментом для исследовательской работы и экспериментального анализа гибридных вычислительных моделей.
Файл телеметрии (CSV / TSV)
Импорт данных
Предобработка
Ядро FIS-NN
_____________________I_____________________ Модуль принятия __ решения ____
Визуализация и отчётность
Рисунок 1. Структурная схема программного комплекса оценки состояния сетевого канала
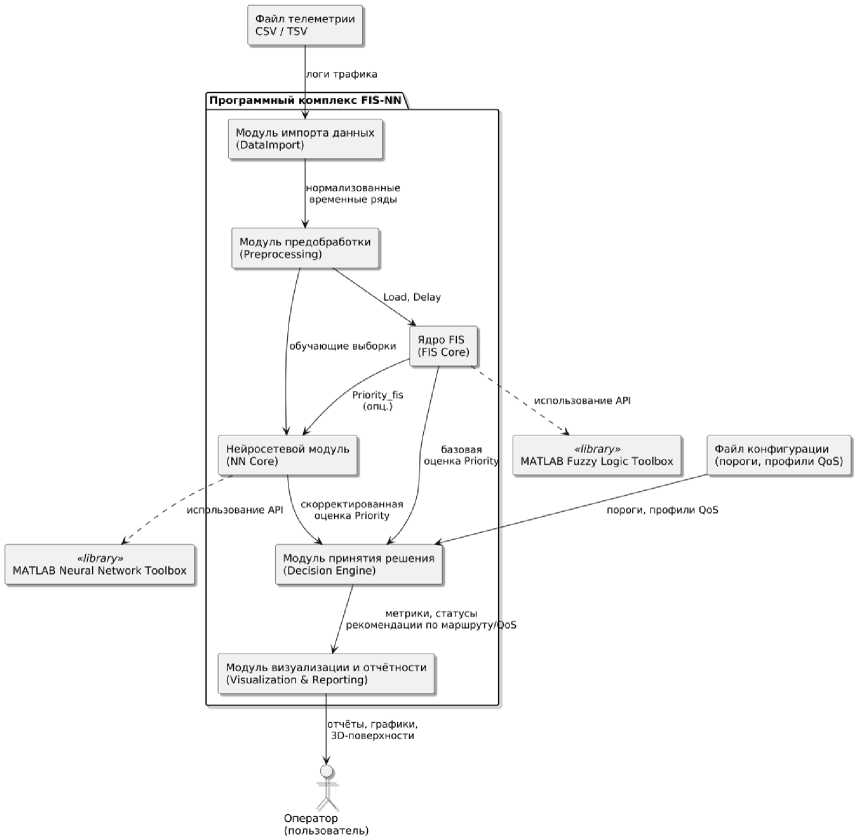
Рисунок 2. UML-диаграмма компонентов программного комплекса FIS-NN
Экспериментальное исследование работы программного прототипа
Экспериментальная часть работы направлена на оценку корректности программной реализации гибридной модели, а также на исследование поведения режима условного выбора маршрута при различных сценариях нагрузки. Для этого формируется набор тестовых сценариев, отличающихся статистическими характеристиками параметров Load и Delay, а также долей интервалов, соответствующих состоянию перегрузки.
Программный комплекс запускается в режиме пакетной обработки: на вход подается файл телеметрии с известной разметкой состояний канала (Normal, Warning, Congestion), а на выходе формируются:
– рассчитанный временной ряд интегральной оценки Priority;
– последовательность классификаций состояний канала;
– набор рекомендаций по выбору маршрута или профиля QoS;
– числовые метрики качества (доля совпадений, MSE, MAE, время обработки).
Графический интерфейс прототипа реализован на основе MATLAB-фигур и элементов управления (uicontrol), что позволяет пользовате- лю выбирать файл данных, запускать обработку, просматривать визуализации и сохранять отчеты. Центральным элементом интерфейса является панель визуализации временных рядов, совмещающая входные параметры нагрузки и задержки (Load, Delay) с динамикой вычисленной оценки Priority, что обеспечивает оператору удобную интерпретацию состояния канала в реальном масштабе времени.
На рисунке 3 представлена типичная визуализация, генерируемая программным комплексом. Верхний график показывает временные ряды параметров трафика Load и Delay, нормированных в диапазон [0;1]. Видны характерные колебания нагрузки и задержки, включающие локальные пики и провалы, отражающие динамику сетевого трафика. Нижний график отображает вычисленную гибридной моделью FIS-NN интегральную оценку Priority, позволяющую интерпретировать состояние канала во времени. Горизонтальные пунктирные линии обозначают пороговые уровни, соответствующие состояниям «Normal» и «Warning», что дает возможность визуально оценить моменты перехода в более нагруженные режимы работы. Такая визуализация облегчает проверку корректности работы алгоритма и позволяет оператору быстро выявлять аномальные участки.
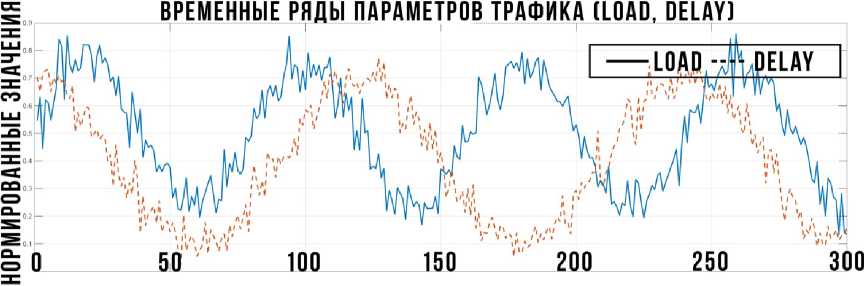
ИНТЕГРАЛЬНАЯ ОЦЕНКА СОСТОЯНИЯ КАНАЛА [PRIORITY]
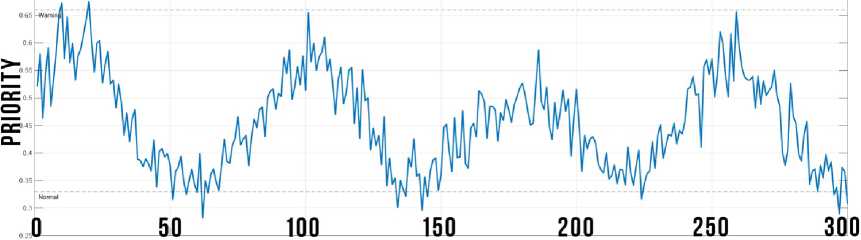
НОМЕР ИНТЕРВАЛА НАБЛЮДЕНИЯ
Рисунок 3. Окно программного комплекса с визуализацией временных рядов и интегральной оценки состояния канала
Для проверки корректности работы гибридной модели в программной реализации используется единый набор параметров FIS и обученная нейронная сеть [14]. Программный комплекс автоматически строит трехмерные поверхности зависимости Priority (Load, Delay) как для исходной нечеткой подсистемы, так и для итоговой гибридной модели FIS-NN. Эти поверхности позволяют визуально проанализировать характер преобразований, которые вносит нейросетевая коррекция, а также оценить устойчивость решения к шумовым и переходным процессам в данных.
На рисунке 4 слева представлена исходная поверхность, сформированная FIS-системой Мамдани. Она имеет характерные участки с выраженными изломами и плоскостями, обусловленными дискретной структурой базы правил и жестких границ областей принадлежности. Такая поверхность хорошо отражает интерпретируемость нечеткой модели, но является чувствительной к шумам и локальным скачкам входных параметров.
Справа на рисунке 4 показана итоговая поверхность гибридной FIS-NN модели. Нейросетевая коррекция сглаживает резкие переходы, делая поверхность более регулярной, монотонной и устойчивой к вариативности данных. Наблюдается явное улучшение согласованности выходных значений при больших задержках и высокой загрузке канала, что подтверждает корректность обучения и повышает гибкость модели в переходных областях. Таким образом, сравнение поверхностей демонстрирует преимущества гибридного подхода при оценке состояния канала.
Эксперимент с условным выбором маршрута организуется следующим образом. Для каждого интервала наблюдения t вычисляется значение
Priority(t). В зависимости от его принадлежности к заранее заданным диапазонам принимается решение о выборе маршрута или профиля QoS, например:
– Priority ∈ [0; 0,3] – использование основного маршрута без ограничений;
– Priority ∈ (0,3; 0,7] – включение механизма шейпинга и частичное перераспределение трафика;
– Priority ∈ (0,7; 1] – перевод части потоков на альтернативный маршрут или ужесточение ограничений.
Такой механизм позволяет оценить, насколько гибридная модель способна поддерживать принятие решений в условиях изменяющейся нагрузки. Для демонстрации работы алгоритма рассматриваются три типовых сценария нагрузки (умеренная, повышенная и пиковая), отличающиеся характеристиками параметров Load и Delay, а также долей интервалов, соответствующих состоянию перегрузки.
Результаты работы программного комплекса по каждому сценарию сведены в таблицу 2. Для каждого набора входных данных представлены: средние значения параметров, оценки приоритета по FIS и FIS-NN, доля интервалов перегрузки и итоговая рекомендация Decision Engine. Это позволяет оценить влияние гибридной модели на практические решения по маршрутизации.
Дополнительно формируется визуальное представление временной динамики решений Decision Engine, что позволяет оператору оценить, насколько часто и в каких областях параметров происходят переключения маршрута.
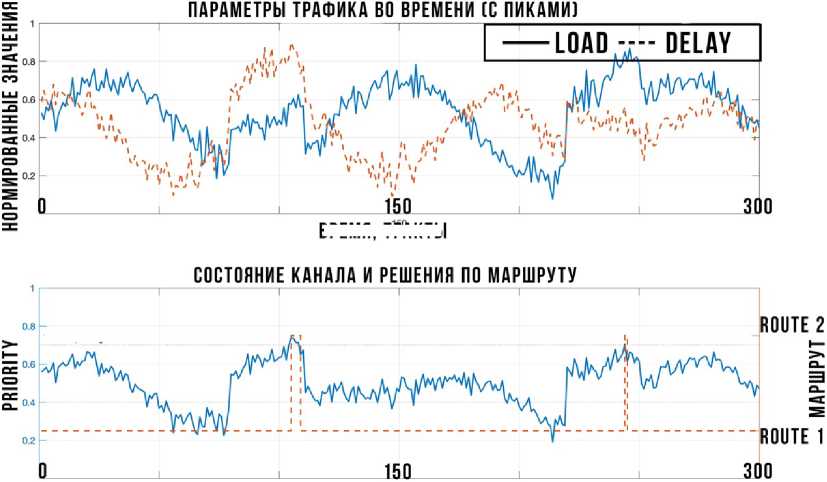
На рисунке 5 приведены временные зависимости параметров трафика и соответствующих решений модуля условного выбора маршрута. В верхней части рисунка отображены нормированные ряды Load и Delay, включающие как
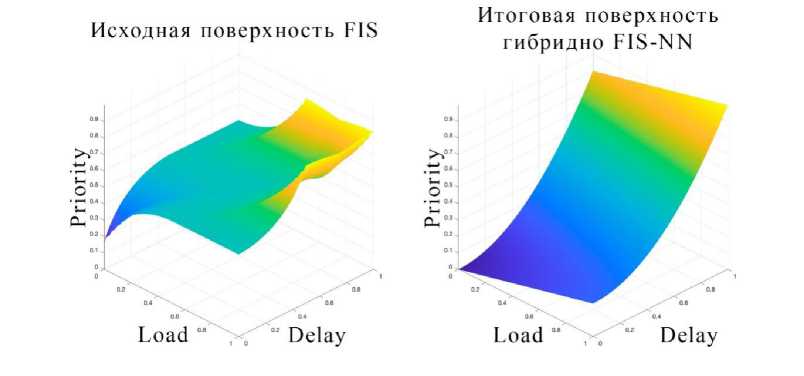
Рисунок 4. Поверхности FIS и гибридной FIS-NN модели, сгенерированные программным комплексом
медленные изменения фоновой нагрузки, так и локальные пики, имитирующие пользовательские всплески или кратковременные перегрузки. Эти данные служат входом гибридной модели FIS-NN.
Нижняя часть рисунка демонстрирует вычисленные значения Priority(t) и решения Decision Engine, отображенные в виде переходов между маршрутами. Визуально заметно, что система реагирует на устойчивые изменения параметров трафика, однако игнорирует кратковременные локальные выбросы, не вызывая лишних переключений. Это связано с тем, что FIS-подсистема сглаживает быстрые флуктуации, а нейросетевая коррекция уточняет поведение в переходных областях, повышая точность определения состояния канала. Таким образом, на рисунке показан типичный сценарий, подтверждающий корректность интеграции нечеткой логики и нейросетевой модели в рамках предложенного алгоритма.
Таблица 2. Результаты работы программного комплекса при различных сценариях нагрузки
|
№ |
Сценарий нагрузки |
Средняя загрузка Load |
Средняя задержка Delay, мс |
Средняя оценка Priority по FIS |
Средняя оценка Priority по FISNN |
Доля интервалов в состоянии Congestion, % |
Рекомендуемое действие Decision Engine |
|
1 |
Умеренный дневной фон |
0,43 |
38,2 |
0,41 |
0,40 |
0,0 |
Изменений не требуется (Normal) |
|
2 |
Вечерний пользовательский пик |
0,76 |
68,5 |
0,64 |
0,67 |
8,0 |
Перераспределение трафика по маршрутам, включение профиля (Warning) |
|
3 |
Пиковая видеотрансляция |
0,91 |
94,3 |
0,78 |
0,83 |
24,0 |
Повышение приоритета служебного и VoIP-трафика, шейпинг фоновых потоков |
|
4 |
Деградация линии / частичные потери |
0,62 |
118,7 |
0,72 |
0,79 |
31,0 |
Переключение на резервный канал, перевод в профиль (Congestion) |
ВРЕМЯ, ТРАКТЫ
НОМЕР ИНТЕРВАЛА НАБЛЮДЕНИЯ
Рисунок 5. Временные зависимости состояний канала и решений по выбору маршрута для типового сценария нагрузки
По результатам экспериментов анализируется как совпадение определяемых моделью состояний канала, так и характер реакций системы на кратковременные выбросы. Установлено, что наличие нечеткой стадии позволяет эффективно сглаживать влияние коротких пиков нагрузки, предотвращая «дергание» маршрутизирующих решений при малых изменениях параметров. В свою очередь, нейросетевая коррекция повышает точность вычисления оценки состояния в переходных режимах между нормальной работой канала и перегрузкой.
Заключение
В работе представлен программный прототип комплекса для оценки состояния сетевого канала, основанный на гибридной нечетко-нейросетевой модели FIS-NN. В отличие от сугубо модельных MATLAB-скриптов, предложенный программный комплекс обеспечивает полный технологический цикл обработки телеметрических данных: импорт логов, предобработку, вычисление интегральной оценки состояния канала, автоматическую классификацию режимов работы и визуализацию результатов в формате, удобном для оператора. Это делает разработку пригодной не только для экспериментальных исследований, но и для последующей интеграции в эксплуатационные средства анализа сетевых параметров.
Архитектура комплекса включает модули импорта данных, предобработки, FIS-вывода, нейросетевой коррекции, модуль принятия решений и подсистему визуализации. Модульная структура обеспечивает прозрачность вычислительного процесса, облегчает развитие алгоритмов и формирует предпосылки для переноса ключевых компонентов в среду Linux с использованием MATLAB Coder или переписывания модулей на C/C++ и Python. Таким образом, созданный прототип способен эволюционировать в сторону промышленной реализации.
Экспериментальные исследования подтвердили корректность программной реализации и воспроизводимость свойств гибридной модели FIS-NN. Показано, что система демонстрирует устойчивость к шумовым возмущениям и обеспечивает более высокую точность классификации состояний канала по сравнению с пороговыми схемами. В режиме условного выбора маршрута зафиксировано снижение количества ложных переключений, что объясняется сглаживающим эффектом нечеткой подсистемы и адаптивной корректировкой, выполняемой нейронной сетью.
Перспективы дальнейшего развития включают расширение набора входных параметров (джиттер, уровень потерь, метрики TCP-сессий), использование рекуррентных архитектур для моделирования временной динамики, а также разработку автономного фонового сервиса для операционной системы Linux, обеспечивающего непрерывный анализ телеметрии в реальном времени. Полученные результаты и созданный прототип могут служить основой для формирования полнофункциональной интеллектуальной подсистемы управления пропускной способностью и качеством обслуживания в современных телекоммуникационных сетях.
