Программная реализация математической модели кинетостатического расчета плоских рычажных механизмов

Автор: Васечкин М.А., Матвеева Е.В., Сидоренко А.С., Чертов Е.Д.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 4 (70), 2016 года.
Бесплатный доступ
Глобальная компьютеризация предопределила доминирующее положение аналитических методов исследования механизмов. В результате этого кинетостатический анализ механизмов с помощью пакетов прикладных программ является важной частью научной и практической деятельности инженеров и конструкторов. Поэтому программная реализация математических моделей кинетостатического расчета механизмов представляет практический интерес. На языке TurboPascal разработаны компьютерные процедуры, вычисляющие усилия в кинематических парах в группах Ассура (ГА) и уравновешивающую силу на начальном звене. Перед применением соответствующих вычислительных процедур необходимо знать все внешние силы и моменты, действующие на ГА, а также определить силы инерции и моменты сил инерции. Сам процесс вычислений и построений положений механизма можно представить следующим образом. Организуется цикл, в котором вычисляется положение начального звена механизма. Затем вычисляются положения остальных звеньев механизма путем обращения к соответствующим процедурам модуля DIADA по ГА. Используя графический режим компьютера, выводим на дисплей положение механизма. Вычисляем силы инерции и моменты от сил инерции. Обращаясь к соответствующим процедурам модуля, вычисляем все усилия в кинематических парах и уравновешивающую силу на начальном звене. В каждой кинематической паре строим силы и их направления при помощи простейших графических процедур. Величины этих сил и их направления выводятся в специальном окне с текстовым режимом. В работе приводятся листинги тестовой программы MyTеst, являющейся примером использования вычислительных возможностей разработанного модуля. В качестве проверки вычислений процедурами модуля в программе приводится пример вычисления уравновешивающей силы по методу Жуковского (рычаг Жуковского).
Программа, математическая модель, кинетостатический расчет, группы ассура
Короткий адрес: https://sciup.org/140229706
IDR: 140229706 | DOI: 10.20914/2310-1202-2016-4-85-89
Program realization of mathematical model of kinetostatical calculation of flat lever mechanisms
Global computerization determined the dominant position of the analytical methods for the study of mechanisms. As a result, kinetostatics analysis of mechanisms using software packages is an important part of scientific and practical activities of engineers and designers. Therefore, software implementation of mathematical models kinetostatical calculating mechanisms is of practical interest. The mathematical model obtained in [1]. In the language of Turbo Pascal developed a computer procedure that calculates the forces in kinematic pairs in groups Assur (GA) and a balancing force at the primary level. Before use appropriate computational procedures it is necessary to know all external forces and moments acting on the GA and to determine the inertial forces and moments of inertia forces. The process of calculations and constructions of the provisions of the mechanism can be summarized as follows. Organized cycle in which to calculate the position of an initial link of the mechanism. Calculate the position of the remaining links of the mechanism by referring to relevant procedures module DIADA in GA [2,3]. Using the graphics mode of the computer displaying on the display the position of the mechanism. The computed inertial forces and moments of inertia forces. Turning to the corresponding procedures of the module, calculated all the forces in kinematic pairs and the balancing force at the primary level. In each kinematic pair build forces and their direction with the help of simple graphical procedures. The magnitude of these forces and their direction are displayed in a special window with text mode. This work contains listings of the test programs MyTеst, is an example of using computing capabilities of the developed module. As a check on the calculation procedures of module in the program is reproduced an example of calculating the balancing forces according to the method of Zhukovsky (Zhukovsky lever).
Текст научной статьи Программная реализация математической модели кинетостатического расчета плоских рычажных механизмов
Глобальная компьютеризация предопределила доминирующее положение аналитических методов исследования механизмов [1–10]. В результате этого кинетостатический анализ механизмов с помощью пакетов прикладных программ является важной частью научной и практической деятельности инженеров и конструкторов. Поэтому программная реализация математических моделей кинетостатического расчета механизмов представляет практический интерес. В качестве языка программирования был выбран Турбо Паскаль фирмы Borland.
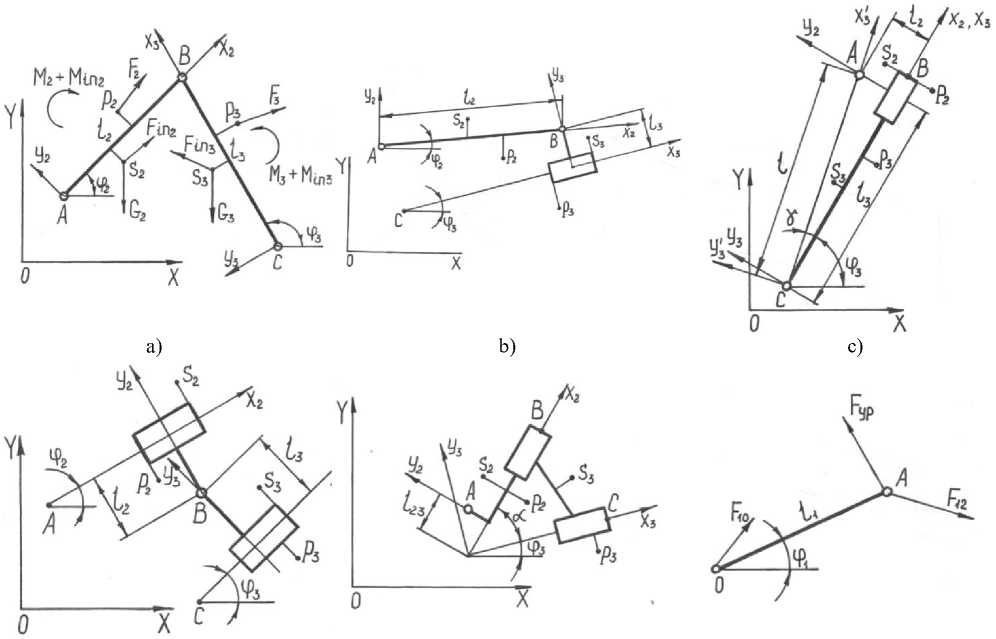
В работе [1] получена математическая модель с процедурами расчета силовых характеристик плоских рычажных механизмов, имеющих в своем составе кроме начального звена хотя бы одну двух поводковую группу Ассура. Расчетные схемы показаны на рисунке 1.
На рисунке 1 приняты следующие обозначения: F 12 - сила, действующая на начальное звено от группы Ассура; F 10 – сила, действующая на начальной звено от стойки; F ур – уравновешивающая сила; l 1 , l 2 , l 3 - длины начального, второго и третьего звеньев; F in2 , M in2 ,F in3 , M in3 – сила инерции и момент от сил инерции на втором и третьем звеньях, соответственно; F 2 , M 2 ,F 3 , M 3 - внешние сила и момент, действующие на втором и третьем звеньях, соответственно; φ 1 , φ 2 ,φ 3 - углы наклона к оси абсцисс начального, второго и третьего звеньев, соответственно; s 2 , s 3 , p 2 , p 3 – центры масс и точки приложения сил соответствующих звеньев.
d)
e)
f)
Рисунок 1. Расчетные схемы двух поводковых групп Ассура: a – первого вида; b – второго вида; c – третьего вида; d – четвертого вида; e – пятого вида; f – ведущее звено
-
Figure 1. Settlement schemes of two flood groups of Assur: a – first look; b – second look; c – third look; d – fourth look; e – fifth look; f – leading link
По результатам работы [1] разработаны компьютерные процедуры, вычисляющие усилия в кинематических парах в группах Ассура и уравновешивающую силу на начальном звене. Перед применением соответствующих вычислительных процедур необходимо знать все внешние силы и моменты, действующие на группу Ассура, а также определить силы инерции и моменты сил инерции. Для их определения, прежде всего, необходимо воспользоваться программным модулем DIADA [2,3], в котором находятся процедуры, вычисляющие кинематические характеристики групп Ассура. Определив таким образом ускорения центров масс звеньев и угловые ускорения звеньев, можно получить информацию о величинах и направлениях сил инерции и моментов сил инерции.
Сам процесс вычислений и построений положений механизма можно представить следующим образом. Организуется цикл, в котором вычисляется положение начального звена механизма. Затем вычисляются положения остальных звеньев механизма путем обращения к соответствующим процедурам модуля DIADA по группам Ассура [2, 3]. Используя графический режим компьютера, выводим на дисплей положение механизма. Вычисляем силы инерции и моменты от сил инерции. Обращаясь к соответствующим процедурам модуля KNTST, вычисляем все усилия в кинематических парах и уравновешивающую силу на начальном звене. В каждой кинематической паре строим силы и их направления при помощи простейших графических процедур. Величины этих сил и их направления выводятся в специальном окне с текстовым режимом. В работе приводятся листинги модуля KNTST и тестовой программы MyTеst, являющейся примером использования вычислительных возможностей разработанного модуля KNTST.
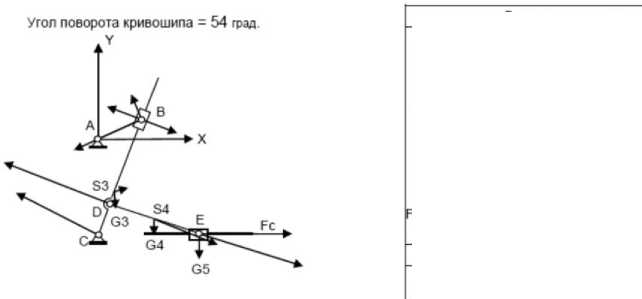
В качестве проверки вычислений процедурами модуля в программе приводится пример вычисления уравновешивающей силы по методу Жуковского (рычаг Жуковского). На рисунке 2 представлен пример работы программы MyTеst.
Фрагмент листинга программы примера расчета механизма1
ProgramMyTest;
{Силовой расчет механизма}
Uses Crt, Graph, Diada, GDiada, Kntst
F_GrText;
Label
Start;
Const g=9.81; n = 360;
writeln('Fin5=', Fin5:12:6, 'Угол =':11>alfafin5*180/pi:5:2);
SetWindow(41,26,80,28,2,'Сила сопротивления', true, false, false);
Writeln('Fc=', Fc:12:6);
ch: = readkey;
if ch = #27 then exit;
if i ≠ n then ClearDevice;
if fi3 < fi3min then begin fi3min: = fi3; ifi3min: = i end;
if fi3 > fi3max then begin fi3max: = fi3; ifi3max: = i end;
end;
if readkey = #27 then exit else goto start;
GraphWriteOff;
FreeMem (p, FileSize(f));
CloseGraph;
writeln('fi3min=', fi3min*180/pi:10:6
ifi3min= ', ifi3min);
writeln('fi3max=', fi3max*180/pi:10:6
ifi3max= ' ifi3max);
readkey;
End. {Main} if ch = #27 then exit else goto start End.
Выход из программы - Esc
|
Расчетные данные |
|
F50= 98 560347 УГОЛ= 270.00 Нх5= 0.00000 F45= 1159.606853 УГОЛ= 342 75 F43" 1231.704974 УГОЛ= 159.17 F30= 970.691007 УГОП= 153.98 F32= 400.430211 УГОЛ= 159.21 НхЗ= 0.00000 F21= 400.430211 УГОЛ= 159.21 F10= 284.204048 Угол= 204.00 Fyp= 282.005825 Угол= 114.00 Рур1= 282 0 05825 Рычаг Жуковского |
|
Силы инерции и моменты |
|
Fin3= 96.967168 УГОЛ= 10.18 Момент от сил инерции= -16.629837 Fin4= 43.945234 Угол= 5.22 Момент от сил инерции= - 0.201592 Нп5= 10 7 945234 УГОЛ= 360.00 |
|
Сила сопротивления |
|
Fc= 1000 00000 |
Рисунок 2. Пример работы программы MyTest
-
Figure 2. Example of work of the program MyTest
Использование библиотечных процедур модуля KNTST, позволяет сравнительно просто организовать имитацию движения механизма, рассчитать реакции в кинематических парах, вычислить уравновешивающую силу и построить план сил в каждом положении механизма. Если необходимо значения силовых характеристик можно вывести на дисплей. Такой подход обеспечивает эффективность при проведении кинетостатического расчета механизма на основе технического задания.
Список литературы Программная реализация математической модели кинетостатического расчета плоских рычажных механизмов
- Сидоренко А.С., Потапов А.И. Математическая модель кинетостатического расчета плоских рычажных механизмов//Вестник Воронежского государственного университета инженерных технологий. 2016. № 1. C. 70-78.
- Васечкин М.А., Потапов А.И., Сидоренко А.С., Чертов Е.Д. Программная реализация математической модели кинематического расчета плоских рычажных механизмов//Вестник Воронежского государственного университета инженерных технологий. 2016. № 2. С 1-3.
- Сидоренко А.С., Дубец С.В., Дубец А.В. Компьютерное моделирование и анализ кинематики механизмов второго класса//Сборник статей по материалам Межвузовской НПК курсантов и слушателей "Молодежные чтения памяти Ю.А. Гагарина 20 мая 2014 г." Воронеж: ВУНЦ ВВС "ВВА", 2014. Ч. 2. C. 154-157.
- Доронин Ф.А. Силовой анализ некоторых пространственных конструкций и механизмов с помощью пакета Mathcad//Теория механизмов и машин. 2014. Т. 12. № 23. С. 59-69.
- Мкртычев О.В. Компьютерное моделирование при кинематическом анализе плоских механизмов//Теория Механизмов и Машин. 2012. № 1. Т. 10. C.46-52.
- Бабичев Д.Т. Компьютерное моделирование работы плоских механизмов и многовариантное конструирование одноступенчатых цилиндрических редукторов//Теория Механизмов и Машин. 2011. № 2. Т. 9. C. 38-47.
- Евграфов А.Н., Петров Г.Н. Компьютерная анимация кинематических схем в программах Excel и Mathcad//Теория Механизмов и Машин. 2008. № 1. Т. 6. C.71-80.
- Доронин Ф.А., Доев В.С. Исследование движения плоского механизма с помощью пакета Mathcad//Теория Механизмов и Машин. 2011. № 1. Т. 9. C 77-87
- Simas H. et al. A new method to solve robot inverse kinematics using Assur virtual chains//Robotica. 2009. V. 27. №. 7. С. 1017-1026.
- Пожбелко В.И. Единая теория структуры, структурный синтез и анализ статически определимых механических систем на основе новой формулы подвижности//Теория механизмов и машин. 2013. Т. 11. № 2(22). С. 15-37.
