Программно-аппаратная реализация бортовых оперативно-советующих экспертных систем на транспорте

Автор: Корнеев Николай Владимирович, Гребенников Андрей Валерьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Научная жизнь
Статья в выпуске: 4-1 т.16, 2014 года.
Бесплатный доступ
В статье раскрыты основные принципы построения интеллектуальных систем на транспорте. Разработана структурно-функциональная схема интеллектуальной системы для программно-аппаратной реализации бортовых оперативно-советующих экспертных систем на транспорте, приведены математические зависимости, реализующие функции управления. Раскрыты принципы реализации векторов действий оператора по его вторичной модели на базе физиологических переменных и признаков, корреляции признака с выполнением работы, пороги нарушенной работоспособности и выводы, относящиеся к признаку.
Управление, интеллект, математические методы, алгоритмы, бортовые оперативно-советующие экспертные системы на транспорте, программно-аппаратное обеспечение
Короткий адрес: https://sciup.org/148203153
IDR: 148203153 | УДК: 004.896:681.518.2
Hardware-software implementation of onboard operatively-advising expert systems on the carrier
In article the basic principles of creation of intellectual systems on transport are opened. The structurally functional scheme of intellectual system is developed for hardware-software realization of onboard operational advising expert systems on transport, the mathematical dependences realizing functions of management are given. The principles of realization of vectors of actions of the operator on his secondary model on the basis of physiological variables and signs, correlation of a sign with work performance, thresholds of the broken working capacity and the conclusions relating to a sign are opened.
Текст научной статьи Программно-аппаратная реализация бортовых оперативно-советующих экспертных систем на транспорте
требуемая вычислительная мощность чтобы имитировать мозг должна была быть достигнута между 2004 и 2008 годом [7, 8].
Если заменить 1000-нейронные модули на компьютерные узлы, то потребуется меньше вычислительной мощности, чем в случае моделирования каждого нейрона по отдельности.
Насколько близки сейчас эти показатели дает информация о работах одного из ведущих производителей ЭВМ – японского концерна NEC, появившаяся в 2004…2006 г. Cуперкомпьютеры SX-6 и SX-8 ориентированы самой фирмой NEC на такие сферы применения, как аэрокосмическая и автомобильная промышленность, энергетика и нефтеоргсинтез, предсказание погоды, вычислительная химия и др.
Одной из отличительных особенностей этого векторно-параллельного компьютера является гибридная NUMA (nonuniform memory access)-SMP (symmetric multiprocessing) архитектура, которая используется как способ передачи сообщений между процессорами, при этом все вычислительные устройства при обращении к ней имеют равные права и одну и ту же адресацию для всех ячеек. Это позволяет эффективно обмениваться данными на основе высокоскоростной системной шины (SGI PowerPath, Sun Gigaplane,), к слотам которой подключаются функциональные блоки трех типов: процессоры (ЦП), операционная система (ОС) и подсистема ввода/вывода (I/O). Компьютер работает под управлением единой ОС типа UNIX, которая распределяет задачи по процессорам, но возможна и явная их привязка.
Отсюда вытекает следующее определение искусственного интеллекта. Искусственный интеллект (ИИ) – это динамическая система, способная без участия человека: строить полнофун- кциональные модели, отображающие сложные явления мира вокруг и самого себя в этом мире; анализировать адекватность (соответствие) различных вариантов моделей с целью отбора из них наиболее точных или оптимальных; формировать на основе выбранных моделей вариантные прогнозы ожидаемых последствий [9].
Для конца ХХ века характерно создание новых систем управления для ТС, в том числе бортовых, на основе микропроцессорных устройств. Если вначале это имело форму локальной автоматизации (для автомобилей – инжекторный управляемый ДВС, автоматические КПП), то затем пришло время спутниковой навигации, маршрутного компьютера и т.д.
В отечественной литературе подобные системы называют в настоящее время БОСЭС – Бортовые Оперативно-Советующие Экспертные Системы, подчеркивая роль пилота в принятии решения, хотя БОСЭС могут вести огонь по противнику в случае нарушения функций пилота.
Эти обстоятельства требуют системного подхода к разработке основных концепций организации бортовых систем – БВС. При выборе направлений этих разработок основные решения формировались на основе следующих принципов: создание семейств устройств в виде унифицированных модулей (common modules), с унификацией 90% программных и аппаратных функций; реализация базового (типового) модуля основных функциональных подсистем, при сравнительно небольшом числе специализированных устройств; организация техобслуживания на основе “сменных блоков” LRU (Line Repla-cable Unit), в каче- стве единицы выбирается базовый модуль, он же – LRU; пилот, прежде всего, реализует функции “системного управления”, которые определяют основные цели всей системы, а операции на нижнем уровне осуществляют модули локального управления, входящие в состав БВС; управляющая БВС ориентирована прежде всего на сложные процессы моделирования в реальном времени, относящиеся к уровню искусственного интеллекта и лишь потом на реализацию алгоритмов исполнительного уровня; взаимодействие БВС и пилота формирует общий “бортовой интеллект”. При этом целесообразно изменяемое управление потоками информации как результат реагирования на изменение обстановки. Необходимо отметить, что, начиная с 1998 г. подобные публикации в США были закрыты для печати.
На рис. 1 приведена блочно-функциональная схема системы с элементами ИИ, учитывающая особенности рассматриваемых систем. Она является развитием блочно-функциональной схемы [9] в направлении дополнения обычной ЧМС элементами ИИ. В основном они относятся к правой части рис. 1, под указателем “Интеллект УЭВМ”. К этой части системы отнесены следующие вычислительные модели и модули: окружающей среды – “непосредственная” модель 1; объект – “непосредственная” модель 2; имитаторы: модели 1 окружающей среды у оператора; модели 2 объекта у оператора; личностной модели оператора; модуль личностного корректора; модуль вектор-наблюдателя.
Имитаторы модели 1 и 2, а также личностной модели оператора, имеют целью повторить
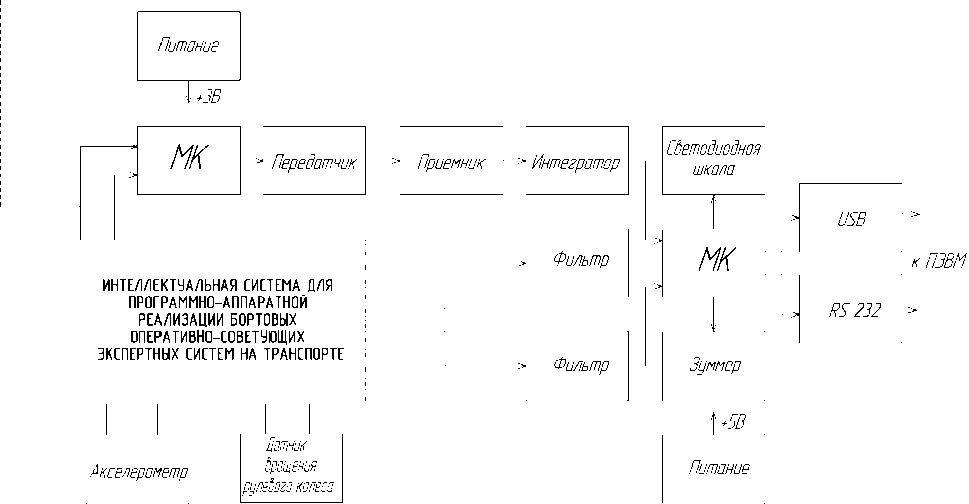
Рис. 1. Интеллектуальная система для программно-аппаратной реализации бортовых оперативно-советующих экспертных систем на транспорте
в достаточно приближенном виде модели, которые существуют внутри оператора. Их задача – объяснить и предвидеть поведение оператора, обусловленное этими факторами. Например, водителю кажется, что двигатель неисправен. Личностная модель отображает его поведение при появлении такой гипотезы. Задача имитаторов – по возможности точнее повторить свойства внутренних моделей.
Отличие “непосредственных” моделей объекта и окружающей среды в системе управления от внутренних моделей оператора и имитаторов их, то есть отображения этих моделей, формируемых у оператора состоит в следующем: непосредственная модель объекта – есть результат его диагностирования и текущего контроля в стационарных условиях и более подробно, то есть это модель, значительно более точная, нежели внутренняя модель у оператора (особенно, если оператор имеет не очень высокую квалификацию); непосредственная модель окружающей среды может формироваться в системе управления объективно (программно и аппаратно), включая: карты района текущей эксплуатации объекта; расстановку маяков, знаков и указателей; состояние атмосферы и дорожные условия; наличие динамических и других помех при движении; модели объекта и окружающей среды у оператора субъективны и деформируются его личностной моделью.
О задачах решаемых личностным корректором и вектор-наблюдателем подробно рассматривается в [9]. В целом, как и идентификационная таблица операторов, эти модули имеют характер обработчиков накапливаемой информации и устройств формирования дополнительно диагностирующих действий и воздействий исполнительного характера.
Уравнения непосредственного отображения объекта и среды. Непосредственное отображение состояния объекта и среды основано на диагностической информации по объекту и наиболее полной по состоянию среды – доступной для системы управления. В то же время нельзя считать, что эта информация идентична уравнению [9], поэтому:
+ 1 ] = Ф ( X , U , F , t ) X [ k ] + Г(t ) Uk ] + Gt ) F [ k ] , (1) где X [ k + 1 ] , X [ k ] — наиболее точные возможные оценки векторов состояния объекта и среды; Ф ( X , U , F , t ) — функция перехода, определяемая наиболее точно известными параметрами состояния объекта и среды; F [ k ] - оценка вектора непосредственных воздействий окружающей среды; Г( t)U [ k ], G ( t ) F [ k ] — интегральные преобразования наиболее точно представленных управляющих и возмущающих воздействий.
Уравнения вторичного отображения объекта и среды в системе управления. Вторичным отображением будем называть уравнения, вторичных моделей, отображающих в системе управления внутренние модели оператора. Их можно записать в виде, аналогичном уравнению [9], с использованием для обозначения вторичных модельных функций и оценок переменных знаком двойной черты сверху символа:
X[k+1]=Ф(X,U,"p,t)X[k]+nt)Uk] + Gt)F[k], (2) где X [k + 1], X [k] — оценки вектора состояния объекта и среды во вторичных моделях; ф(X, U, F, t) — функция перехода вторичной модели, F[k] — оценка вектора возмущающих воздействий во вторичной модели; Г(t)U[k], G(t)F[k] - преобразования воздействий вторичной модели; Y[k] — вектор переменных вторичных моделей состояния: Y[k] = CX [k] + w[k], где w[k] – вектор помех измерений; C – матрица формирования оценок измеримых переменных.
Уравнения вторичной личностной модели оператора. Эта модель строится аналогично с учетом уже известных из моделей объекта и среды [8] функций:
~
~ ~
~_ ~ ~._ ~
Y"[k + 1] = ?~(Y, t) Y"[k ] + ^( X, t) X [k + 1] +
+ Г ( t )( U [ k ] ) + G ( t ) F [ k ] , (3)
~
~
где ~[k +1], ~[k] — векторы действий оператора ~ ~ по его вторичной модели; {~(Y, t) — функция перехода вторичной личностной модели оператора. Согласно (3) действия оператора строятся на основе его внутреннего состояния и прогноза состояния объекта и среды. Таким образом, отдельно учитывается влияние прогноза состояния объекта и окружающей среды на формирование вектора управляющих действий оператора. Прогностические способности оператора для ТС имеют очень важное значение и требуют специального тестирования и развития.
Информационный поиск выявил много физиологических признаков, которые, измеряют возбуждение, усталость или бдительность, т.е. векторы действий оператора по его вторичной модели, формула (1). Раздел отражает информа- цию, относящуюся к методу, с помощью которого физиологический признак отражает физиологические переменные, корреляцию признака с выполнением работы, пороги нарушенной работоспособности и выводы, относящиеся к признаку.
Детально рассмотрим 8 методов:
-
- электроэнцефалография (ЭЭГ);
-
- моргания глаз;
-
- движение глаз;
-
- PERCLOS;
-
- электродермальная активность (ЭДА);
-
- движения головы;
-
- электрокардиограмма (ЭКГ);
-
- движение рук .
Электроэнцефалография (ЭЭГ) - это измерение электрической активности мозга (центральной нервной системы) во времени [11]. ЭЭГ описывают с использованием интервалов частот. Известно, что они связаны с сонливостью и бодрствованием, а именно: дельта (0,5-3 Гц), тета (3 -7,5 Гц), альфа (7,5 -13 Гц), бета1 (13-20 Гц), бета2 (20-30 Гц). Бодрствование характеризуется преобладанием частот альфа и бета активности. Сонливость характеризуется возрастанием ритмической альфа-активности. Дремота и засыпание характеризуются присутствием частот тета-активности. Для сна характерны высокие амплитуды тета и дельта-активности.
Измерения производятся с кожи над затылочной и височной областями мозга. Электроды ставятся на определенных участках головы. Число и положение электродов может быть различным.
Моргание глаз. Показано, что скорость морганий (число морганий в секунду) и их длительность (продолжительность закрывания глаз) обычно возрастает по мере совершения работы и усталости.
Появление моргания может быть определено как определенный процент закрывания глаз относительно среднего размера зрачка или полное закрывание глаз. Продолжительность моргания может быть определено как временной интервал между началом моргания и возвратом диаметра зрачка к определенному проценту закрытия глаза. Скорость морганий может быть определена как число появлений морганий за единицу времени. Средняя, типичная скорость морганий измеряется индивидуально для каждого человека, когда он бодрствует (до начала признаков засыпания). Затем измеряется скорость и длительность морганий и сравнивается с базовыми показателями.
Измерения скорости морганий может проводиться с помощью камер, следящих за глазами (видео или инфракрасных), помещенных перед пользователем или на нем (головное крепление), или используя метод ЭОГ. 2 - 6 электродов крепятся к голове, чтобы регистрировать сигналы, генерируемые мышцами, вовлеченными в сокращение глаза.
Движения глаз. Движение глаз включает сак-кадную частоту (быстрое скачкообразное движение глаз, связанное с фиксацией взгляда), время фиксации, длительность, амплитуды и скорости сак-кадного движения. Все они меняются при выполнении работы и при низких уровнях возбуждения.
Частота саккады – это частота, с которой движется глаз. Амплитуда саккадного движения – это величина движения глаза из обычного положения. Они обычно измеряются за некоторый период времени. Движения глаз измеряются для бодрствующего человека, обычно во время работы. Затем, движения глаз измеряются и сравниваются с основными движениями. Показано, что частота и высокоамплитудные движения глаз уменьшаются за время вождения автомобиля. Время изменения амплитуды - хороший индикатор сна или дремотных состояний.
Измерения движений глаз может быть произведено с помощью камеры, следящей за глазами (видимой или инфракрасной) помещенной перед пользователем или на нем (установка на голове), или с использованием техники ЭОГ. 2 -6 электродов крепятся к голове, чтобы регистрировать сигналы, генерируемые мышцами, вовлеченными в сокращение глаза.
PERCLOS основан на исследованиях на автомобильных симуляторах. У водителей происходит отчетливое изменение лица и глаз при усталости. Было отмечено, что у дремлющих водителей снижен тон мускулов лица, замедлены движения глаз и более длительны периоды, когда глаза закрыты по сравнению с бодрыми водителями.
PERCLOS – это измерение доли времени, в течение которого веки испытуемого частично закрыты по оценкам наблюдателя или соответствующей прикладной программы. Критерием дремоты является состояние, когда глаза закрыты больше 80% за минуту. У дремлющих испытуемых уменьшен тонус мышц лица, замедлены движения глаз и увеличено время закрытых глаз .
Процесс регистрации закрывания глаз был автоматизирован с использованием цифровых камер, следящих за глазами, лицом и специально разработанных программ.
Порог для определения дремоты – когда процент закрывания глаз оценивается как превышающий 80% в течение 1 минуты. Если этот порог превышен, человек считается дремлющим.
Лабораторными исследованиями доказано, что параметр PERCLOS является универсальным параметром для определения усталости и дремоты. Однако, может оказаться, что параметр пригоден только для предсказания близкого появления засыпания. Также существуют пробле- мы, связанные с разным размером зрачка, типом морганий, а также влиянием окружающих и персональных факторов.
Электродермальная активность (ЭДА) - это электрическая активность, сопротивление и разность потенциалов, на поверхности кожи. Уровень активности отражает определенное внутреннее состояние.
Было показано, что электрическое сопротивление кожи не постоянно, но подвержено изменениям двух типов:
-
- медленные изменения электродермального сопротивления, которые меняются на протяжении минут и часов. Они отражают нервную стимуляцию мышц;
-
- быстрые изменения на несколько сот Ом или кОм в ответ на чувственную или эмоциональную стимуляцию. Эти электродермальные реакции являются производной электродер-мального сопротивления, и как было показано, чувствительны к падению бодрствования и возможно к потере внимания.
Доказано, что электродермальная активность (потенциал кожи) уменьшалась в соответствии с потерей производительности при исполнении работы, что частота электродермальных реакций уменьшается перед ошибкой в работе. Кроме того, уменьшение ЭДР коррелировало со временем реакции во время выполнения теста визуального распознавания.
ЭДА измеряется с помощью электродов на коже. Они измеряют электрическую активность кожи во времени. Измерения обычно усиливаются предварительным усилителем и затем регистрируются полиграфом.
ЭДА полезна для измерения уровня возбуждения, когда испытуемый чувствует сонливость, но не в момент засыпания. Работы показывают, что ЭДА является надежным критерием определения ошибок, до того как измерения ЭЭГ показывают присутствие индикаторов сна (например, ритмичная альфа активность и тета-активность).
Движение головы. Движение головы или ее положение на шее относительно нейтрального положения и относительно тела меняется при изменении бдительности и усталости.
При увеличении усталости напряжение в шее человека начинает уменьшаться, в результате чего голова начинает покачиваться, опускается или поворачивается. Эти движения измеряются для получения индикаторов уровня дремоты.
Активность мышц может измеряться поверхностными электродами, помещенными вблизи мышц шеи, либо прибор, который регистрирует x, y, и z координаты головы, используя магнитные поля или акселерометр прикрепленный к голове для измерения ускорений.
Электрокардиограмма (ЭКГ) - измерения параметров сердца включают: частоту сердечных сокращений (число сердечных биений в единицу времени), время между последовательными сокращениями, пиковые частоты в ЭКГ и компоненты пиковых частот.
Исследования показали, что определенная компонента в спектре частот коррелирует с усталостью при работе машиниста. В лабораторных монотонных работах, возбуждение центральной нервной системы в ЭЭГ спектре соответствовало отчетливому увеличению числа сердечных сокращений. Однако, это не коррелировало с выполнением работы. Было показано, что частота сердечных сокращений коррелирует с волновой активностью мозга, показывая дремотное состояние при исследовании пилотов. Измерения параметров сердца могут быть скорее индикатором возбуждения, чем прямым измерением исполнения работы .
Движение рук. Известно, что бодрствующему человеку сложно находиться в неподвижном состоянии, это обусловлено физиологическими факторами и приводит к онемению и “затеканию” мышц. Следовательно водитель совершает в данном случае движение руками с небольшой амплитудой, что отражается на вращении рулевого колеса на угол 5…10 градусов даже при движении по прямому участку дороги. Все современные автомобили имеют допустимый люфт в рулевом механизме в установленных приделах и небольшие манипуляции руля никак не сказываются на прямолинейность движения. Во время засыпания происходит снижение активности мышц, движение рулевого колеса прекращается или амплитуда колебаний снижается. Эти изменения можно отслеживать поместив на рулевой вал датчик угловых перемещений (энкодер).
Идея создания подобных устройств не нова, первыми такие системы появились на морском и железнодорожном транспорте.
В табл. 1 приводится краткий обзор устройств контроля состояния водителя автотранспорта, с учетом измеряемого параметра, а также страны производителя.
Программно-аппаратная реализация предлагаемой бортовой оперативно-советующей экспертной системы для контроля состояния водителя представлена на рис. 2.
Целесообразно реализовать интеллектуальную систему с учетом математических алгоритмов приведенных в (1)-(3), а также устранив недостатки описанные выше.
ВЫВОДЫ
-
1. Анализ указанных устройств и систем показал, что все они имеют свои достоинства и не-
- Таблица 1. Обзор устройств контроля состояния водителя автотранспорта
-
2. Ведется много разработок в сфере контроля состояния глаз, но общий недостаток всех этих систем это неспособность работать с солнцезащитными очками. Поэтому это направление рассматривать нецелесообразно.
-
3. Высокий уровень точности у параметра ЭЭГ. Для его измерения используется американское устройство мониторинга дремоты -Drowsiness Monitoring Device (DMD). Главный недостаток – это большое неудобство, связанное с тем, что датчик крепится на затылок, к тому же для корректной работы системы необходима смазка проводящим гелем. Такой дискомфорт в управлении автомобилем неприемлем.
-
4. Вести измерения наклонов головы по принципу, используемом в приборе “Антисон”, не следует, так как устройство реагирует на все движения и начинает выдавать ошибки по управлению, если даже водитель бодр. Это очень существенный недостаток. Система регистрации микронаклонов головы - MicroNod Detection System (MINDStm) учитывает его, но архитектурно, очень громоздка.
-
5. Предлагаемая интеллектуальная система совмещает в себе все плюсы конкурентов также учитывает минусы и пожелания потребителей. Для выбора контрольного физиологического параметра, изменение которого будет отслеживать в дальнейшем, необходимо, чтобы он был максимально достоверен.
|
№ |
Прибор |
Характеристика |
Стр ана |
Измеряемый параметр |
Ком пания |
|
1 |
Vigiton |
Телеметрическая с истем а контроля бодрствования водителя |
Россия |
ЭДА и ЭДР |
NEUROCOM |
|
2 |
MINDStm |
Основная функция – это регистрация микронаклонов |
США |
Движения головы |
Advanced Safety Concepts, Inc |
|
3 |
Eye Tracking Alertness monitor |
Мониторинг тр аектори и глаз |
США |
Мониторинг дв иж ен ия века, изменение зрачка, мониторинг дв и ж е н и я гл аз |
Future of Technology and Health |
|
4 |
DMD |
М ониторинг дре м оты |
США |
ЭЭГ |
Advanced Brain Monitoring Inc |
|
5 |
Photo Driven Alert System |
Фотографическая систем а м ониторинга бодрство вания - |
США |
Частота моргания |
Michael Myronko |
|
6 |
ETS-PC Eye tracking system |
С истем а мониторинга глаз |
США |
Закрывание глаз |
Applied Science Laboratories |
|
7 |
VDADA |
М ониторинг дре м оты |
США |
Движения головы, закрывание глаз |
BRTRC Technology Research Сorporation |
|
8 |
PERCLOS - Copilot PERCLOS - Monitor |
С истем а мониторинга глаз |
США |
Моргание |
Driving Research Center |
|
9 |
Alertness M onitor ambulatory eye blink monitor |
С истема передвижного мониторинга морганий глаз |
США |
Моргание |
MTI Research Corp. |
|
10 |
Device for monitoring haul truck oрerator alertness |
Система мониторинга засы пан ия в одителя на тр ансп орте |
Австралия |
В ремя реакции |
Australian Coal Association Research Programme |
|
11 |
faceLAB™ 2.0 |
С истем а мониторинга глаз |
Австралия |
Моргания и закрывание глаз |
Seeing Machines |
|
12 |
Eye tracker and steering wheel sensor |
М они тори нг дви ж ения двух параметров: движение глаз, изменение положения рулевого колеса |
Великобрит ания |
Технологии слежения за глазом |
Bristol University |
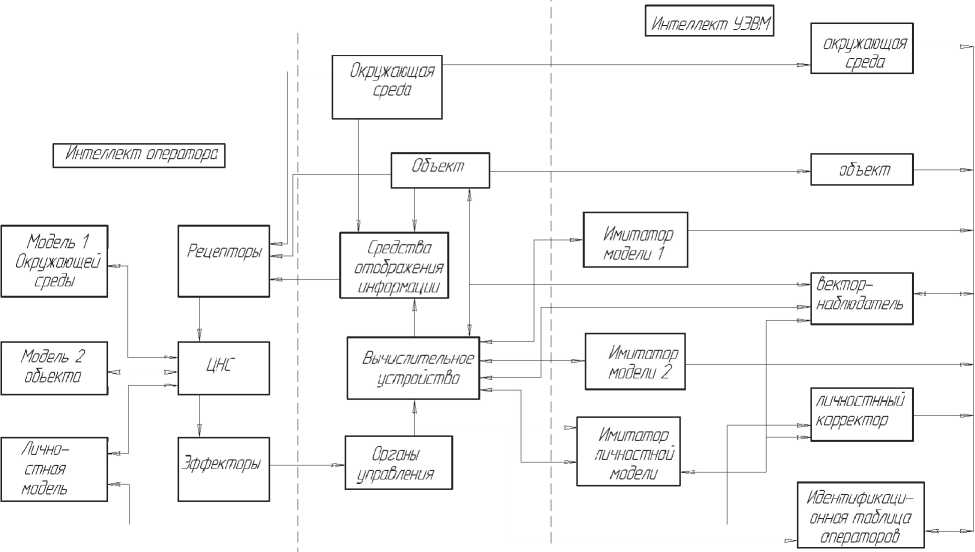
Рис. 2. Схема программно-аппаратной реализации бортовой оперативно-советующей экспертной системы на транспорте для контроля состояния водителя достатки, опираются на тот или иной метод контроля определенного параметра.
Список литературы Программно-аппаратная реализация бортовых оперативно-советующих экспертных систем на транспорте
- Автоматное управление асинхронными процессами в ЭВМ и дискретных системах [под ред. В.И. Варшавского]. М.: Наука,1986. 400 с.
- Бесекерский В.А., Попов Е. П. Теория систем автоматического регулирования. М.: Наука, 1975. 768 с.
- Винер Н. Кибернетика, или управление и связь в животном и машине. М.: Наука, 1983.
- Воронов А.А. Введение в динамику сложных управляемых систем. М.: Наука, 1985. 697 с.
- Нечеткие множества в моделях управления и искусственного интеллекта/А.Н. Аверкин,В.Б. Тарасов и др. [под ред. Д.А. Поспелова]. М.: Наука.1986. 312 с.
- Острем К., Виттенмарк М. Системы управления с ЭВМ. М.: Мир, 1987. 480 с.
- Корнеев Н.В. Микропроцессорный блок управления и контроля движения автомобиля.//Автомобильная промышленность. 2008. №8. С. 19…21.
- Корнеев Н.В. Принципы разработки и создания интеллектуальных систем управления на транспорте с учетом алгоритмизации взаимодействия оператора, объекта, окружающей среды и системы управления на базе современных высокопроизводительных микропроцессоров//Ученые записки РГСУ. 2011. №9. С. 211…215.
- Корнеев Н.В., Кустарев Ю.С., Морговский Ю.Я. Теория автоматического управления с практикумом: учебное пособие с грифом УМО. Москва: ИЦ Академия, 2008. 224 с.
- Постановление Правительства Москвы от 22.02.2012 N 64-ПП (ред. от 10.07.2013) "О внесении изменений в государственные программы города Москвы и об утверждении государственной программы "Открытое Правительство" на 2012-2016 гг." (вместе с "Государственной программой города Москвы "Информационный город (2012-2016 годы)". Подпрограмма "Создание интеллектуальной системы управления городом Москвой".
- Человеческий фактор. Бодрствование водителя. Обзор систем фактором [Электронный ресурс]: Системные требования: Adobe Acrobat Reader URL: http://www.neurocom.ru/ru/about/report_rssb_russian.pdf.
