Программно-аппаратный комплекс имитации режимов полёта самолёта

Автор: Кириллов Алексей Владимирович, Лвкин Иван Николаевич, Прокофьев Александр Валерьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 6-3 т.15, 2013 года.
Бесплатный доступ
В статье рассмотрена методика создания программно-аппаратного комплекса, предназначенного для имитации различных режимов полёта самолётов. Так же рассматриваются методы применения подобного комплекса как для экспериментальной (исследовательской) работы, так и в учебном процессе.
Моделирование, режимы полёта, образовательный процесс, исследовательская работа
Короткий адрес: https://sciup.org/148202628
IDR: 148202628 | УДК: 629.7.08
Software and hardware of aircraft flight simulation
In this article we describe the method of software and hardware creation. Complex is created for aircraft flight simulation. Also in article we describe the method of complex application in researches and in educational process.
Текст научной статьи Программно-аппаратный комплекс имитации режимов полёта самолёта
ма с тремя малогабаритными гировертикалями, система гидропитания стенда, система электроснабжения стенда, проводка управления с рулевыми приводами РП-56, элементы рулевых поверхностей (элероны, интерцепторы, хвостовое оперение). Аппаратная реализация стендового комплекса полностью соответствует бортовому варианту.
Модель учебного процесса на данном стендовом комплексе представлена на рис. 1.
В соответствии с руководством по технической эксплуатации воздушного судна и описания стендового оборудования создаются методические указания по выполнению учебного занятия. Студент изучает техническую документацию, в соответствии с методическими указаниями выполняет работу на стенде и составляет отчёт.
Стендовый комплекс позволяет имитировать следующие режимы:
-
- разбег и отрыв от взлётно-посадочной полосы;
-
- набор высоты;
-
- горизонтальный полёт в штурвальном режиме;
-
- режимы автономного автоматического управления;
-
- снижение и заход на посадку.
Дальнейшее усложнение лабораторного задания требует от студента более высокого уровня подготовки. Это связано с отсутствием визуального представления полёта на стенде. Данное обстоятельство не позволяет устанавливать более сложные задания студентам (например, работа систем в нестандартных ситуациях – при частичных или полных отказах).
В связи с этим разработка и создание визуальной панорамы, с возможностью отображения параметров полёта, для стендового комплекса значительно повысит эффективность его приме-
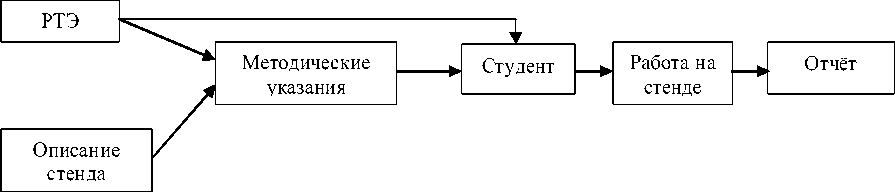
Рис. 1. Модель стандартного учебного процесса
нения в учебном процессе, а так же позволит выполнять научно-исследовательскую работу.
Для этого случая предложена модель учебноисследовательского образовательного процесса (рис. 2).
Студент является центральным звеном, перед которым ставится исследовательская задача (например, как будет работать система автоматического управления в режиме разворота на заданный угол курса при отказе гидропитания двух подканалов рулевого агрегата РА-56 в проводке управления элеронами). Для решения поставленной задачи студент обеспечен всей необходимой исходной информацией (РТЭ, описание стенда, среда графического программирования LabVIEW, авиасимулятор FlightGear), а так же рекомендациями по работе на стенде (методические указания №1) и рекомендациями по моделированию полётных ситуаций (методические указания №2). После выполнения экспериментальной части составляются отчётные материалы, обязательной частью которых является систематизация и обоснование полученных результатов.
Для реализации предложенной методики разработан программно-аппаратный комплекс имитации режимов полёта самолёта (рис. 3). Комплекс состоит из двух основных частей:
-
1. Система сбора и обработки информации. Система реализована на аппаратно-программных платформах компании National Instruments: PXI-платформа и среда графического программирования LabVIEW;
-
2. Авиасимулятор “FlightGear” — это кросс-платформеный проект с открытым исходным кодом, разрабатываемый коллективно. Весь исходный код проекта доступен и лицензирован. Лицензия GNU General Public License.
Цель проекта FlightGear состоит в том, чтобы создать авиасимулятор для использования в исследовательских и академических средах, для развития и преследования других интересных идей моделирования полета, и как приложение для пользователя.
Функциональная нагрузка комплекса обеспечивает:
-
- непрерывный сбор данных о параметрах полета самолета;
-
- фильтрация и оцифровка аналоговых сигналов датчиков;
-
- расчет текущих координат местоположения ЛА;
-
- передача параметров полета в программу – симулятор;
-
- контроль правильности отработки параметров программой - симулятором.
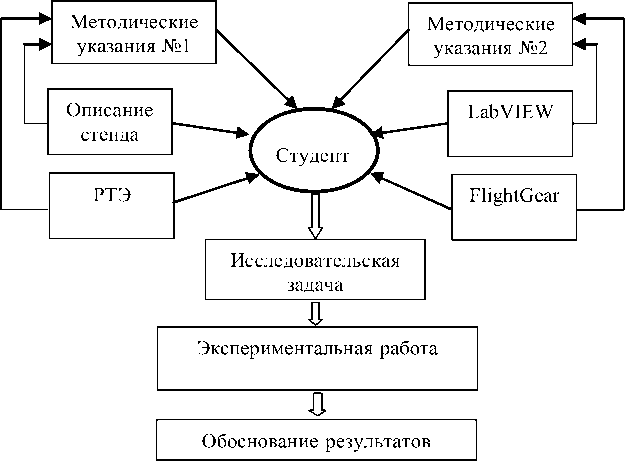
Рис. 2. Модель учебно-исследовательского образовательного процесса
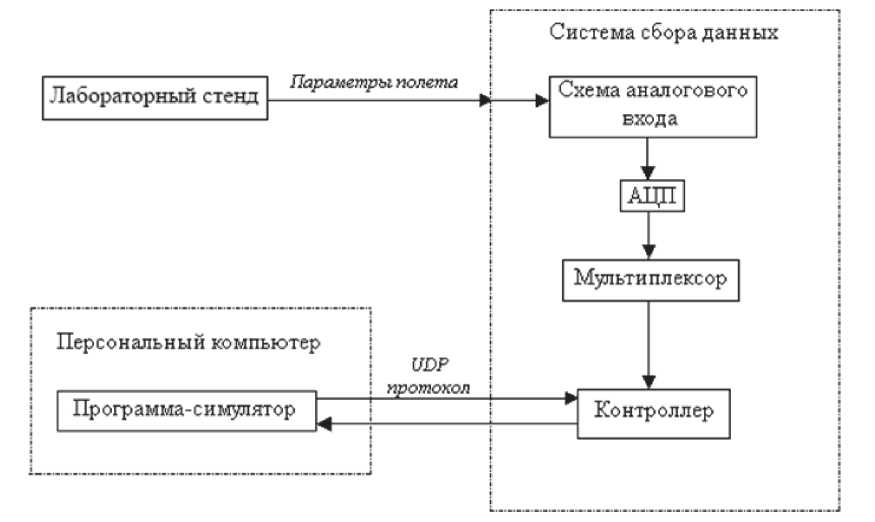
Рис. 3. Структурная схема программно-аппаратного комплекса имитации режимов полёта самолётов
В качестве исходной информации используются базовые сигналы о положении самолёта в пространстве и его высотно-скоростные параметры: курс, крен, тангаж, скорость и высота полета.
Источниками сигнала крена и тангажа являются три малогабаритные гировертикали МГВ-1СК, установленные на поворотной двухстепенной платформе. Гировертикаль МГВ-1СК формирует выходные сигналы в виде напряжения переменного тока с синусно-косинусных трансформаторов СКТ-265Д канала крена, и СКТ-232 канала тангажа, которые поступают в блок коммутатора гиродатчиков КГ-7. В блоке КГ-7 они преобразуется в сигнал постоянного тока, изменяющийся в пределах (-12,5…+12,5) В. Информация в подобном виде удобна для обработки и калибровки системой сбора данных.
Параметры полного и статического давления поступают на вход вычислителя скорости, числа маха и высоты ВСМВ-1-15, где преобразуются в напряжение переменного тока. Затем сигналы поступают в блоки преобразования напряжения БПнП-4 канала барометрической высоты и БПнП-10 канала истинной воздушной скорости. В этих блоках сигналы преобразуются, и выдаются последующим потребителям в виде относительных сопротивлений. Диапазон сопротивлений изменяется пропорционально скорости и высоте в диапазоне от 1кОм до 3кОм. Система сбора данных генерирует напряжение питания потенциометров U=5В и замеряет величину падения напряжения на потенциометре.
Источником сигнала курса является точная курсовая система ТКС-П2. Данная система имеет два первичных источника сигнала курса. Пер- вый источник – гироагрегат ГА-3, формирующий значение гирополукомпасного курса. Второй -индукционный датчик ИД-3, воспринимающий результирующий вектор напряжённости магнитного поля Земли и формирующий сигнал магнитного курса самолета.
Ввиду технической сложности обработки сигналов от первичных источников, наиболее целесообразным решением является использование сигнала гиромагнитного курса из блока БГМК-2. Данный блок выдает потребителям гиромагнитный курс, т.е. магнитный курс, выработанный с помощью ИД-3 и осредненный гирополукомпас-ным курсом. Одним из потребителей является блок распределительный БР-40, предназначенный для выдачи сигналов, пропорциональных курсу, в виде постоянного и переменного тока записывающим, телеметрическим устройствам и другим потребителям в диапазоне от 0° до 360°. Блок БР-40 преобразует сигнал гиромагнитного курса из БГМК-2 и выдаёт его потребителям в виде падения напряжения на потенциометре. Сопротивление потенциометра измеряется системой сбора данных.
Обработка исходной информации осуществляется программой – виртуальным прибором, разработанным инструментами графического программирования LabVIEW.
Формирование визуального изображения полёта осуществляет программа-симулятор “FlightGear”.
Обмен данными между виртуальным прибором и “FlightGear” происходит путём передачи UDP пакетов посредством интерфейса Ethernet.
Протокол UDP является одним из двух основ- ных протоколов транспортного уровня, расположенных непосредственно над IP. Он предоставляет прикладным процессам транспортные услуги, которые не многим отличаются от услуг, предоставляемых протоколом IP.
С одной стороны протокол UDP в отличие от протокола TCP не обеспечивает надежную доставку дейтаграмм. Его пакеты могут быть потеряны, продублированы или прийти не в том порядке, в котором они были отправлены. К заголовку IP-пакета он добавляет два поля, одно из которых, поле «порт», обеспечивает мультиплексирование информации между разными прикладными процессами, а другое поле – «контрольная сумма» – позволяет поддерживать целостность данных.
Однако функциональная простота протокола UDP обуславливает простоту его алгоритма, компактность и высокое быстродействие. Поэтому для приложений, в которых реализован собственный, достаточно надёжный, механизм обмена сообщениями, предпочтительно использовать менее надёжные, но зато более быстрые средства транспортировки – UDP-протоколы. Протокол UDP может быть использован и в том случае, когда имеется хорошее качество каналов связи, обеспечивающее достаточный уровень надёжности и без применения дополнительных приёмов (например, установления логического соединения и квитирования передаваемых пакетов).
В рамках разрабатываемой системы виртуальный прибор LabVIEW выполняет следующие функции:
-
- прием значений параметров полета от системы сбора данных;
-
- вычисление географических координат местоположения самолёта;
-
- формирование и отправка UDP-пакета со значениями параметров полета в программу-симулятор;
-
- прием и расшифровка UDP-пакета со значениями параметров полёта, отработанными программой-симулятором;
-
- вывод значений курса, крена, тангажа, скорости, высоты и географических координат, полученных с лабораторного стенда и из програм-
- мы-симулятора для контроля работоспособности системы.
Основной частью виртуального прибора является цикл “FOR”, под средством которого происходит приём значений от системы сбора данных и расчёт дополнительных параметров, необходимых для правильного отображения модели самолёта, а именно географических координат места (широта и долгота).
Затем все данные формируются в таблицу в строгой последовательности. Последовательность определяется специальным файлом – протоколом. В нём записана последовательность параметров, приходящих в симулятор. Этот файл необходим для правильной интерпретации симулятором полученных данных. Фрагмент блок-диаграммы виртуального прибора представлен на рис. 4.
Для определения широты и долготы используются значения истинной воздушной скорости Vu ; текущего гиромагнитного курса Y mk ; и время формирования пакета A T .
Исходя из полученных значений, рассчитывается расстояние, пройденное самолётом, за время формирования пакета A T :
A S = V u -A T , (1) где A S — расстояние, км.
Далее рассчитанное значение A S используется для вычисления географических координат:
А(Р =--COSV /о\
^ 1112 гмк ’ (2)
A S
AA --sin Y • cos Y
111 2 гмк гмк ,
где A ^ - изменение широты места за время A T , град.;
A ^ - изменение долготы места за время A T , град.
Для работы программы-симулятора “FlightGear” необходимы не приращения координат, а текущие значения широты и долготы места самолета. Поэтому они рассчитываются виртуальным прибором путём интегрирования приращений географических координат по формулам (4) и (5):
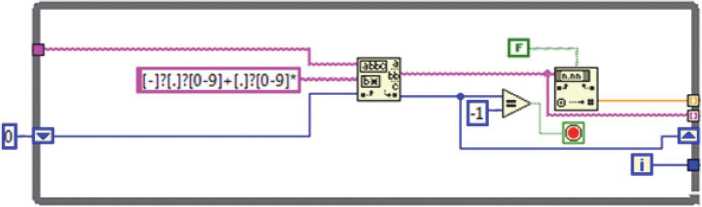
Рис. 4. Фрагмент блок-диаграммы виртуального прибора (приём данных)
A T
Ф = Ф 0 + J Aф dt , (4)
t =0
A T
Л = Л 0 + J А Л /t , (5)
t =0
где ф 0 - значение широты места в начальный момент времени;
Л 0 - значение долготы места в начальный момент времени.
Так как UDP протокол передачи данных считается ненадёжным, то для повышения точности и стабильности системы применён алгоритм формирования и отправки пакетов высокой частоты. Для решения этой задачи, в виртуальном приборе существует специальный блок, который задаёт временной интервал задержки между пакетами.
Задачей программы-симулятора “FlightGear” является приём данных от виртуального прибора LabVIEW и отображение трёхмерной модели самолёта и окружающего пространства (рис. 5).
Для имитации различных режимов полёта применяются разнообразные методы отображения информации и мониторинга полёта. Для примера на рис. 6 представлена навигационная карта, содержащая информацию о местоположение самолёта в реальном масштабе времени, а также близлежащие навигационные точки и аэропорты.
С помощью навигационной карты можно моделировать отклонение от линии заданного пути. При выполнении работы студенты могут в доступной и наглядной форме увидеть траекто-

Рис. 5. Виртуальная модель самолета
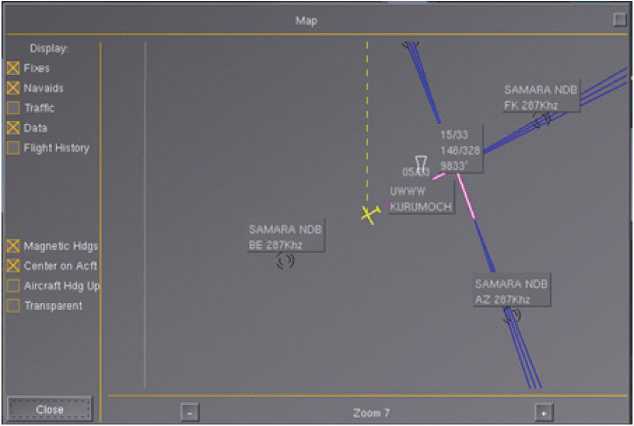
Рис. 6. Навигационная карта
рию полёта самолёта, точно фиксировать момент прохождения промежуточных пунктов маршрута и наблюдать за формированием и накоплением ошибки в виде отклонения самолёта от линии заданного пути.
Таким образом, разработанный программноаппаратный комплекс симуляции режимов полёта самолёта является эффективным инструментом для выполнения исследовательских и учебных работ.
Список литературы Программно-аппаратный комплекс имитации режимов полёта самолёта
- Разработка прикладного программного обеспечения в среде LabVIEW: учебное пособие/Н.А. Виноградова, Я.И. Листратов, Е.В. Свиридов. М.: Издательство МЭИ, 2005;
- LabVIEW для радиоинженера: от виртуальной модели до реального прибора. Практическое руководство для работы в программной среде LabVIEW/Ю.К. Евдокимов, В.Р. Линдваль, Г.И. Щербаков. М.: ДМК Пресс, 2007. 400 с.
- Самолёт ТУ-154. Руководство по технической эксплуатации. Книга 1. М.: ОАО “Туполев”, 1975. 834 с.
