Программное средство для автоматизации моделирования профиля оптической поверхности

Автор: Демин Антон Юрьевич, Марчук Сергей Михайлович, Рейзлин Валерий Израилевич
Журнал: Проблемы информатики @problem-info
Рубрика: Средства и системы обработки и анализа данных
Статья в выпуске: 5 (17), 2012 года.
Бесплатный доступ
Предлагается метод аппроксимации профиля асферической оптической поверхности, содержащей ошибки изготовления. Для аппроксимации используются измеренные отклонения реального профиля от расчетного. Результатами аппроксимации являются значения коэффициентов в уравнении профиля асферической поверхности. Аппроксимация выполняется с целью анализа влияния ошибок изготовления на качество изображения оптической системы, элементом которой является контролируемая асферическая поверхность. Разработано автоматизированное программное средство PROFILE, реализующее предложенный метод.
Метод аппроксимации, асферическая оптическая поверхность, профиль поверхности, уравнение профиля
Короткий адрес: https://sciup.org/14320175
IDR: 14320175 | УДК: 535.3+519.61
Текст научной статьи Программное средство для автоматизации моделирования профиля оптической поверхности
Постановка задачи . Технологический процесс производства полимерной оптики для систем отображения информации, в частности для проекционных оптических систем на основе DMD- и LCD-модуляторов изображения [1], предусматривает контроль формы асферической поверхности. Контроль формы поверхности в условиях массового производства, как правило, сводится к измерению в двух взаимно перпендикулярных направлениях величины отклонения DX ( У ) =REALX ( У ) - X ( У ) реального профиля поверхности (стрелки поверхности) REALX ( У ) от расчетного профиля X ( У ) ( У - расстояние от оси симметрии поверхности). Расчетный профиль асферической поверхности описывается выражением вида [2]
X (У) --. — + АУ4 + B У6 + СУ8 + D У10 + E У12, (1)
’ R 1 + 71 - ( 1 + K )( У/R ) 2
DX
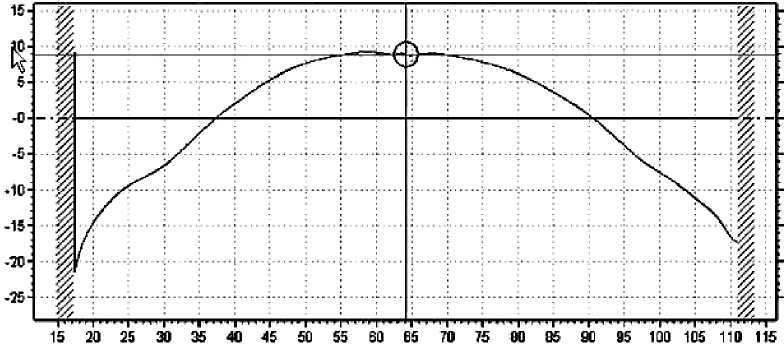
Y
Рис. 1. График функции DX ( У )
где значения величин R , K , A, B , C , D , E определяются в процессе автоматизированного проектирования оптической системы требуемыми фокусным расстоянием и аберрационными свойствами асферической поверхности. На рис. 1 представлены результаты измерения величины отклонения DX ( У ) асферической поверхности диаметром 92 мм, полученные в графическом виде на контактном профилометре Taylor - Hobson Form Talysurf с использованием программного обеспечения pltra Software.
Графическая и табличная формы представления функции DX ( У ) малопригодны для непосредственного анализа влияния измеренных отклонений профиля на качество изображения оптической системы, элементом которой является контролируемая асферическая поверхность. В связи с этим представляется целесообразным аппроксимировать функцию REALX ( У ) выражением вида (1). В этом случае анализ влияния измеренных отклонений может быть выполнен путем замены расчетной поверхности реальной асферической поверхностью, содержащей ошибки изготовления, непосредственно в математической модели оптической системы, реализованной с помощью одной из программ автоматизированного проектирования оптических систем (CODE V, Zemax).
Аппроксимация функции REALX(У) выражением вида (1) и оценка ошибок контролируемой поверхности обычно выполняются с помощью трудоемких неавтоматизированных вычислений. Предлагаемая в настоящей работе технология и разработанное на ее основе программное средство PROFILE позволяют автоматизировать этот процесс и существенно уменьшить продолжи тельность технологического этапа.
Описание метода . Аппроксимация функции REALX ( У ) выражением вида (1) может быть выполнена следующим образом.
Известна табличная функция DX (У), по которой нетрудно восстановить REALX(У) = DX(У)-X(У) , т. е. получить таблицу (¥i,REALX(¥i)), i = 1,..., m. Восстановим модель вида (1), приближающую реальную кривую REALX (У). Для этого применим метод наименьших квадратов т 2т
F(с) = 7£(X(c,Y)"REALX(Y)) = T£f,(c) ^min.(2)
-
2 i-I
Отсюда можно найти коэффициенты модели (1)
c = ( R , K , A , B , C , D , E ) т.
Здесь m - число точек; REALX ( Y ) — измеренные данные; X ( c , Y ) — теоретическая модель; f ( c ) = ( f . ( c ) ,..., fm ( c ) ) т .
Для отыскания минимума функции (2) применим квазиньютоновский метод [3], согласно которому система уравнений для расчета направления поиска минимума на очередной k -й итерации имеет вид
(J (ck )т J (ck ) + S (ck )) Pk = -VF (ck).
Здесь J (c ) - матрица Якоби функции f (c); VF (ck) = J (ck )т f (ck); S (c) - аппроксимация по m секущим матрицы £ f (c )V2 f (c) , вычисляемая по формуле i=1
'0,
S, ,=^ 1 1 _(3)
k+1 Sk - ——-WjmXV. +—yk^, k * 0,
I P k W k P k Ук P k
W k = J ( ck + 1 ) т J ( ck ) + S ( ck ) , Ук = J ( ck + 1 ) т f ( ck + 1 )- J ( ck ) т f ( ck ) .
Если матрица H ( ck ) = J ( ck + 1 ) т f ( ck + 1 ) + S ( ck ) положительно определена, то при вычислении S ( ck + 1 ) по формуле (3) матрица J ( ck + 1 ) т J ( ck + 1 ) + S ( ck + 1 ) также будет положительно определена. Это означает, что на поздних итерациях метода, когда J ( ck + 1 ) и J ( ck ) различаются незначительно, сохранность положительной определенности матрицы системы для расчета направления поиска обеспечена. Однако в начале вычислений матрица H ( ck ) может получиться не положительно-определенной и направление Pk не будет являться направлением спуска. Чтобы избежать этого, модифицируем метод следующим образом.
-
1. На каждой итерации в матрицу H ( ck ) вносим возмущение и делаем ее положительноопределенной, т. е. полагаем H ( ck ) = H ( ck ) + qkI , где qk = 0, если H ( ck ) положительно определена и хорошо обусловлена, qk > 0 в противном случае. Значение qk > 0 выбирается таким образом, чтобы оно незначительно превышало наименьшее значение q , при котором матрица H ( ck ) + qI будет положительно-определенной и хорошо обусловленной и Pk станет направлением спуска.
-
2. В результате возмущения матрицы H ( ck ) шаг вдоль направления Pk может оказаться очень большим, поэтому уменьшения значения функции может не произойти. В этом случае
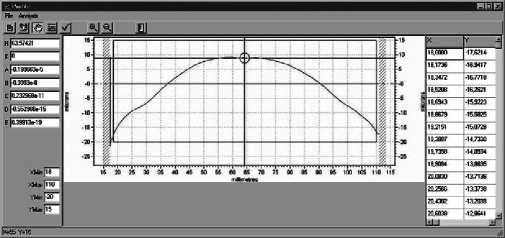
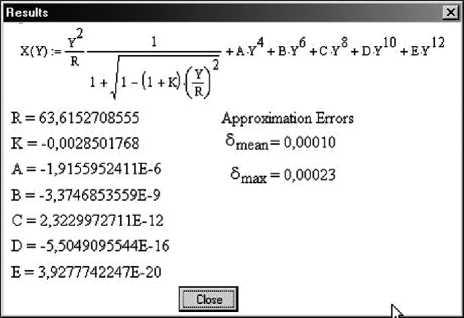
Рис. 2. Исходные данные для аппроксимации Рис. 3. Результаты работы приложения PROFILE
применяем следующую стратегию линейного поиска с дроблением шага [4]. Зададим а е (0, 0,5), 0 < l < и < 1. Выберем коэффициент дробления gk = 1 и будем уменьшать его, если необходимо, следующим образом. При F (ck + gkpk )> F (ck) + agkVF (ck )т pk будем полагать gk = bgk для b е [l, и ]. После нахождения приемлемого gk положим окончательно ck+i = ck + gkPk.
Квазиньютоновский метод, описанный выше, обладает достаточно хорошей сходимостью и может быть использован для аппроксимации функции REALX ( У ) выражением вида (1).
Реализация метода . Предлагаемый метод программно реализован в приложении PROFILE, предназначенном для аппроксимации реального профиля асферической поверхности выражением вида (1). Исходными данными для работы приложения являются результаты измерения величин отклонения DX ( У ) =REALX ( У ) - X ( У ) реального REALX ( У ) профиля поверхности от расчетного X ( У ). Допускается представление функции DX ( У ) в графической или табличной форме. В случае графического представления в приложении предусмотрена возможность выбора значимого для аппроксимации участка кривой DX ( У ).
Результатами работы приложения являются значения величин R , K , A, B , C , D , E, которые далее могут быть использованы при анализе допустимости измеренных отклонений с помощью одной из программ автоматизированного проектирования оптических систем (CODE V, Zemax).
Исходные данные для аппроксимации и результаты работы приложения PROFILE показаны на рис. 2, 3 соответственно.
Заключение. Аппроксимация профиля асферической поверхности выражением вида (1) и оценка отклонений контролируемой поверхности обычно выполняются с помощью трудоемких неавтоматизированных вычислений. Предлагаемый в работе метод позволяет автоматизировать этот процесс и существенно уменьшить время обработки технологических данных. При использовании неавтоматизированного подхода время расчета ошибок обработки одного профиля составляет приблизительно пять дней. Полуавтоматизированный расчет с использованием математического пакета MathCAD продолжается примерно 1 ч и требует высокой квалификации инженера. Разработанное приложение PROFILE полностью автоматизировано и позволяет решить поставленную задачу за 1-2 мин. Результаты работы приложения могут быть использова- ны при анализе допустимости измеренных отклонений с помощью одной из программ автоматизированного проектирования оптических систем (CODE V, Zemax).
Список литературы Программное средство для автоматизации моделирования профиля оптической поверхности
- МАРЧУК С. М. Широкоугольный проекционный объектив для системы отображения информации//Опт. журн. 2006. Т. 73? № 12. С. 27-29.
- Оптический производственный контроль/Пер. с англ. Е. В. Мазуровой и др. под ред. А. Н. Соснова. М.: Машиностроение, 1985.
- DENNIS J. E. (JR.), GAY D. M., WELSH R. E. An adaptive nonlinear least-squares algorithm//Trans. Math. Software. 1981. N 7. P. 348-368.
- DENNIS J. E. Numerical methods for unconstrained optimization and nonlinear equations/J. E. Dennis, R. B. Schnabel. New Jersey: Prentice-Hall, Inc., 1983.
