Прототип беспилотного электромобиля на базе конструктора Bigo.Land

Автор: Чугунов М.В., Полунина И.Н., Овчинников А.Ю.
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Машиностроение
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
Введение. Современное электромобилестроение активно развивается по многим направлениям. Разработка и реализация проектного решения для электромобиля являются актуальными задачами, включающими в себя множество частных взаимосвязанных исследовательских, конструкторских и технологических задач. В данной статье рассматривается прототип электромобиля, реализующий проектное решение, основанное на комбинированном управлении, включающем в себя ручное, дистанционное и программное управление. Цель исследования. Разработать и реализовать проектное решение для прототипа электромобиля с системой комбинированного управления в ручном, дистанционном (по радио) и беспилотном режимах с возможностью для пилота легко и безопасно менять режим управления. Материалы и методы. В качестве методов и инструментов решения поставленной задачи используются современные методы моделирования и проектирования, основанные на интегрированном подходе, предполагающем разработку виртуальных (CAx) и натурных моделей, построенных на базе конструктора Bigo.Land и ArduPilot. Результаты исследования. Результатом исследования является интегрированная модель прототипа электромобиля в целом и, в частности, натурная модель, CAx-модели, система управления, обеспечивающая комбинированное дистанционное, программное и ручное управление. Компоненты (натурные и виртуальные) интегрированного объекта связаны этой же системой управления. Обсуждение и заключение. Разработанная интегрированная программно-аппаратная модель прототипа электромобиля, система траекторного управления и результаты анализа этой модели обеспечивают функционал комбинированной системы управления электромобилем и могут быть использованы разработчиками и производителями данного вида техники.
Электромобиль, CAD/CAE (CAx), автономизация мобильной техники, натурные и виртуальные модели, комбинированное управление, обгонная муфта двунаправленного действия, прототипирование
Короткий адрес: https://sciup.org/147250936
IDR: 147250936 | УДК: 658.274 | DOI: 10.15507/2658-4123.035.202502.186-203
Prototype of an Electric Vehicle Based on Bigo.Land
Introduction. Modern electric vehicle industry is actively developing in many areas. Developing design and implementing a design decision for an electric vehicle are urgent tasks, including many specific interconnected research, design and technological problems. This article discusses a prototype electric vehicle, in which there is implemented a design decision based on combined control, which includes manual, remote and program control. Aim of the Study. The study is aimed at developing and implementing a design decision for an electric vehicle prototype with a combined control system in manual, remote (by radio) and unmanned mode that allows the pilot to easily and safely change the control mode. Materials and Methods. To solve the problem, there were used modern modeling and design methods based on an integrated approach involving the development of virtual (CAx) and full-scale models based on the Bigo.Land constructor and ArduPilot. Results. The result of the study is an integrated model of an electric vehicle prototype in general and, in particular, a full-scale model, CAx models, a control system providing combined remote, software and manual control. The components (full-scale and virtual) of the integrated object are connected by the same control system. Discussion and Conclusion. The developed integrated software and hardware model of an electric vehicle prototype, trajectory control system and the results of this model analysis provide the functional of a combined electric vehicle control system and can be used by designers and manufacturers of this type of machinery.
Текст научной статьи Прототип беспилотного электромобиля на базе конструктора Bigo.Land
МАШИНОСТРОЕНИЕ / MECHANICAL ENGINEERING
EDN:
Конфликт интересов: авторы заявляют об отсутствии конфликта интересов.
Финансирование: публикация осуществляется в рамках проекта «Разработка САПР и анализ проектных решений», реализуемого победителем грантового конкурса для преподавателей 2023/2024 Стипендиальной программы Владимира Потанина.
Контент доступен по лицензии Creative Commons Attribution 4.0 License .
This work is licensed under a Creative Commons Attribution 4.0 License .
Prototype of an Electric Vehicle Based on Bigo.Land
M. V. Chugunov , I. N. Polunina, A. Yu. Ovchinnikov
National Research Mordovia State University, Saransk, Russian Federation
H m.v.chugunov@mail.ru
Introduction. Modern electric vehicle industry is actively developing in many areas. Developing design and implementing a design decision for an electric vehicle are urgent tasks, including many specific interconnected research, design and technological problems. This article discusses a prototype electric vehicle, in which there is implemented a design decision based on combined control, which includes manual, remote and program control.
Aim of the Study. The study is aimed at developing and implementing a design decision for an electric vehicle prototype with a combined control system in manual, remote (by radio) and unmanned mode that allows the pilot to easily and safely change the control mode. Materials and Methods. To solve the problem, there were used modern modeling and design methods based on an integrated approach involving the development of virtual (CAx) and full-scale models based on the Bigo.Land constructor and ArduPilot.
Results. The result of the study is an integrated model of an electric vehicle prototype in general and, in particular, a full-scale model, CAx models, a control system providing combined remote, software and manual control. The components (full-scale and virtual) of the integrated object are connected by the same control system.
Discussion and Conclusion. The developed integrated software and hardware model of an electric vehicle prototype, trajectory control system and the results of this model analysis provide the functional of a combined electric vehicle control system and can be used by designers and manufacturers of this type of machinery.
Conflict of interest: The authors declare that there is no conflict of interest.
Funding: The publication is carried out within the framework of the project “CAD development and analysis of design solutions”, implemented by the winner of the grant competition for teachers 2023/2024 of the Vladimir Potanin Scholarship Program.
Acknowledgements: The authors thank the anonymous reviewers, and also express their gratitude to the Vladimir Potanin Foundation, which supported this project.
Одной из частных инженерных задач является реализация функции комбинированного управления, сочетающая в себе дистанционное (по радиоканалу), программное и ручное управление. Дистанционное и программное управление для краткости и во избежание путаницы с терминологией ArduPolot будем называть телематическим. В случае нештатных ситуаций, когда у пилота возникает необходимость взять управление на себя, или же в случае, когда по той или иной причине пилот решает изменить программную траекторию движения – указанная функция является необходимой.
В данной работе рассматриваются бюджетные варианты реализации системы управления электромобилем, которые удовлетворяли бы всем техническим требованиям проекта в целом.
Целью исследования является разработка прототипа электромобиля, обладающего указанным функционалом комбинированного управления, под которым мы понимаем возможность простого и безопасного переключения пилотом режимов управления с ручного на телематический и обратно.
Обзор литературы. Перспективы развития электромобилестроения широко обсуждаются в литературе в экономическом [1], техническом [2] и экологическом аспектах [3; 4].
В ряду технических проблем прототипирования особое место занимает рассмотрение вопросов, связанных с информационными технологиями, используемыми для управления электромобилем, его автопилотированием и функциями автономного поведения [5–7]. Наиболее близкими к нашему исследованию являются те работы, которые рассматривают задачи прототипирования электромобиля, в частности, проекты, выполненные по программе инженерного соревнования Formula Student Russia1.
Одной из частных инженерных задач, решаемых в рамках данного проекта, является реализация комбинированного (ручного, дистанционного, программного) управления. Среди подходов к решению этой задачи рассмотрим те из них, которые используют только механические системы без электронных компонент.
Как правило, в этом случае предлагается использовать роликовые или зубчатые (планетарные) муфты, предусматривающие два варианта работы. Первый вариант в основном используется в схватах роботов андроидного типа и обеспечивает передачу
Vol. 35, no. 2. 2025 ENGINEERING TECHNOLOGIES AND SYSTEMS dp крутящего момента от входного вала к выходному, а также блокировку выходного вала (самоторможение) при необходимости. Второй вариант (как в нашем случае) предусматривает суммирование углов поворота двух входных валов на выходном валу.
В кинематической схеме механизма, обеспечивающего второй вариант работы, необходимо предусмотреть дополнительную вращательную степень свободы для детали, которая в первом варианте фиксируется. В остальном принципиальная разница между этими механизмами отсутствует.
Так, в исследование [8] был предложен механизм двунаправленного действия с использованием планетарного зубчатого зацепления, обеспечивающий малую потерю мощности и малый люфт по сравнению с муфтой роликового типа и при высокой скорости вращения.
В работах [9; 10] приведены проекты муфт роликового типа, ориентированные на первый вариант работы, представлен их подробный кинематический, статический и динамический анализ, даны рекомендации по поводу назначения размеров конструктивных элементов.
Анализ обгонных муфт сопряжен со значительными трудностями и предусматривает моделирование контактного взаимодействия твердых деформируемых тел с учетом сил трения. Авторами исследования [11] представлен усовершенствованный метод анализа фрикционных контактов в муфтах свободного хода, позволяющий оценить возможность проскальзывания в контакте и потери сцепления в зависимости от сценария использования муфты. В работе [12] выполнен анализ энергоэффективности муфты при значительных нагрузках.
Сложность задачи предполагает широкий арсенал средств и инструментов анализа конструкции. Например, ANSYS используется в исследованиях [9; 10], инструменты ADAMS/SOLVER SUBROUTINE – в статье [13], SIMULINK – в работе [14].
В целом, представленное нами исследование продолжает опыт авторов по разработке беспилотных мобильных систем на базе ArduPilot/APM/Pixhawk [15–18].
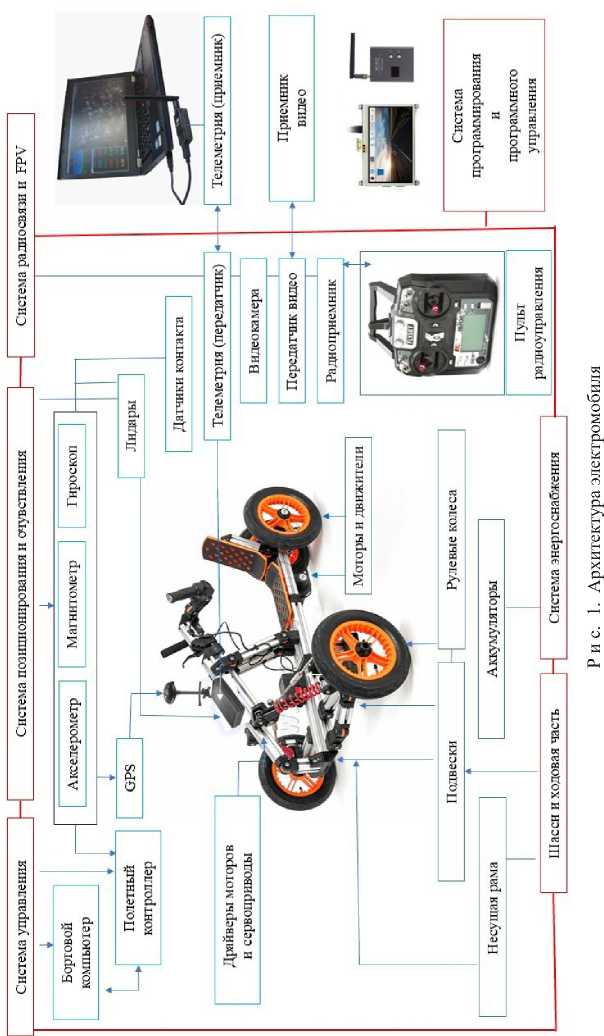
Материалы и методы. Архитектура прототипа электромобиля в общем виде представлена на рисунке 1 и включает в себя следующие компоненты и системы: шасси и ходовую часть; электродвигатель (как правило, более одного); системы энергоснабжения, управления, радиосвязи (FPV), позиционирования и очувствления, программирования и программного управления.
Управление движением электромобиля (мобильного колесного робота) осуществляется по классической схеме (рис. 1) с двумя приводными (задними) колесами и двумя рулевыми (передними) колесами. Механизм поворота обеспечивает принцип управления Аккермана [19] и включает в себя вал руля, маятник, установленный на валу руля и осуществляющий поворот рулевой трапеции. В случае программного и дистанционного управления конструкция дополняется сервоприводом. Таким образом, согласно классификации [20] рассматриваемый робот относится к типу 4Х2K2Ру.
В программно-аппаратную часть системы управления2, построенную на базе ArduPilot и используемую нами в работах [16–18], внесли некоторые изменения.
Источник: рисунки 1, 11 составлены авторами статьи.
Source: figures 1, 11 are made by the authors of the article.
Штатный вариант ArduPilot (ArduRover) предусматривает использование ШИМ-сигнала в качестве управляющего для драйвера мотора, а драйвер Bigo. Land в качестве управляющего использует аналоговый сигнал, получаемый непосредственно от ручки газа (с использованием датчика Холла). В этой связи необходимо между соответствующим портом Pixhawk, передающим управляющий ШИМ-сигнал, и драйвером мотора установить настраиваемый конвертер, преобразующий ШИМ в аналоговый сигнал, соответствующий по диапазону изменения напряжения штатным значениям Bigo.Land. Во всем остальном программно-аппаратная часть системы управления совпадает с представленной в работах [15–18].
Виртуальная CAx-модель электромобиля разработана в соответствии с конструктивными особенностями Bigo.Land в параметрической форме, при этом глобальными переменными являются основные геометрические параметры шасси: L (колесная база) и H (размер колеи) [15]. Видеоролик3 иллюстрирует основные параметрические свойства модели, а также процесс тестирования прототипа электромобиля как в натурном, так и виртуальном вариантах в различных режимах управления.
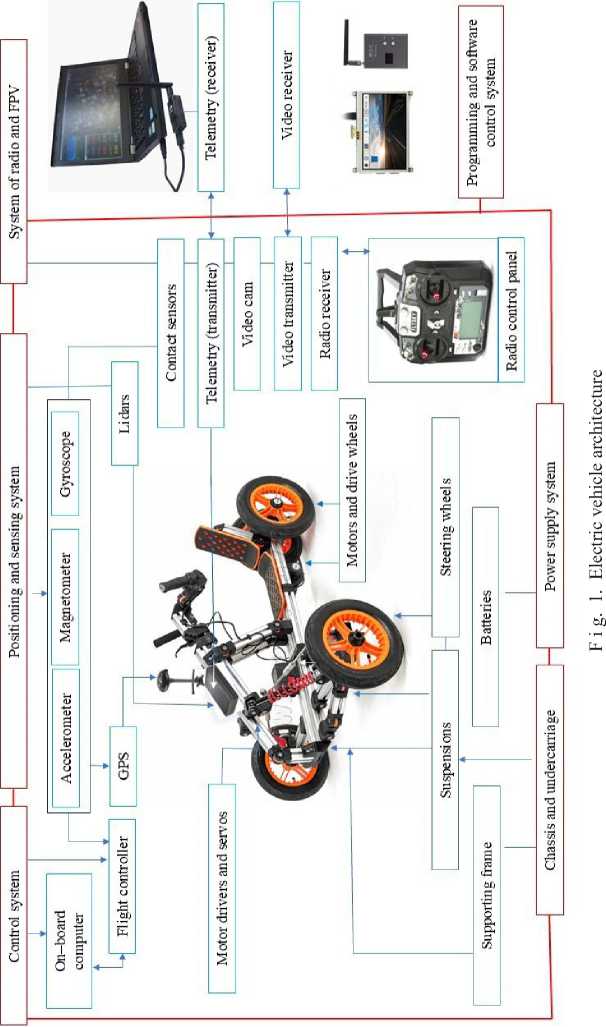
Основным инструментом интеграции виртуальной и натурной модели является единая система траекторного управления и путевой стабилизации [15–18]. К сожалению, для виртуальной модели в виде CAx реализовать процесс управления синхронно в реальном времени не удается в виду вычислительной трудоемкости CAx-модели. Средства имитационного моделирования, включенные в состав наземных станций управления (например, ArduPilot SITL, Mission Planner4), позволяют синхронизировать управление натурной виртуальной модели и модели, созданной в среде MissionPlanner. При этом необходимо обеспечить комбинированное дистанционное (программное) и ручное управление. Это означает, что поворот вала руля, соединенного с рулевой трапецией, должен совершаться в дополнение к повороту вала сервомотора, реализующему функции автопилотирования. Иными словами, необходимо дополнительное устройство, установленное между валом сервомотора и валом руля, обеспечивающее функцию «подру-лирования» со стороны пилота (рис. 2). Необходимость такой функции очевидна и связана прежде всего со всякого рода нештатными ситуациями, в которых автопилот не в состоянии справиться, и требуется вмешательство пилота.
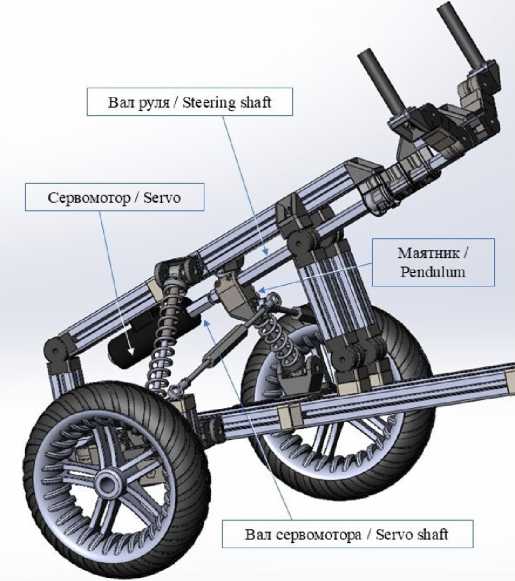
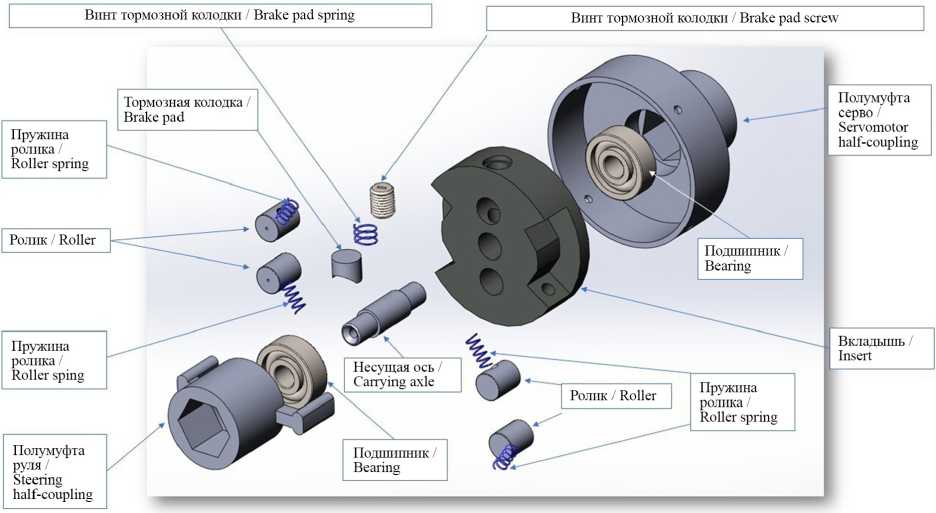
Указанную задачу можно решить, используя обгонную муфту двустороннего действия. На рисунке 3 приведена сборка обгонной муфты, которая включает в себя полумуфту и вал рулевой трапеции, полумуфту и вал сервомотора, ролики, пружины роликов, подшипники, а также вал руля с кулачками. На рисунке 4 показана установка обгонной муфты на актуальную для решения этой задачи часть всей конструкции электромобиля. Видеоролик иллюстрирует сборку муфты5.
Р и с. 2. Система управления движением
F i g. 2. Motion control system
Источник: модели для рисунков 2–10 построены в САx-системе SolidWorks.
Source: models for figures 2–10 are created with the use of the САx-SolidWorks.
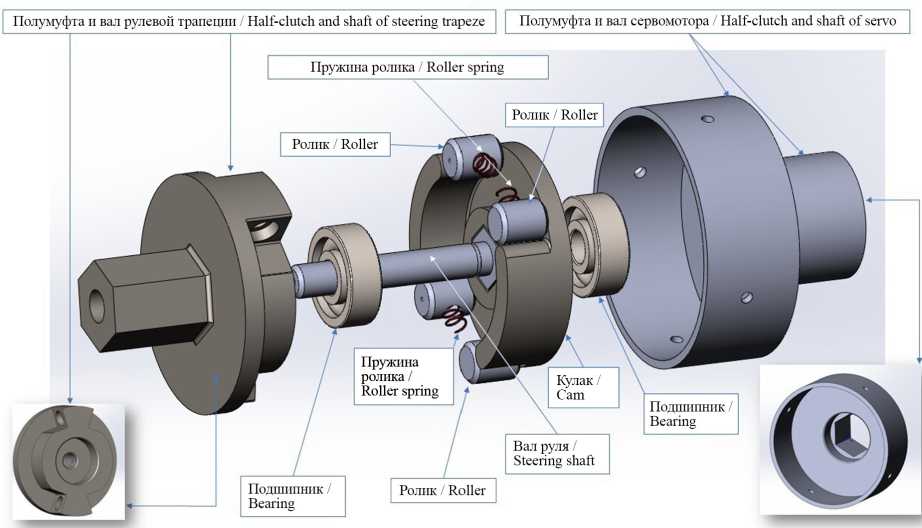
Р и с. 3. Сборка обгонной муфты
F i g. 3. Overrunning clutch portion assembly
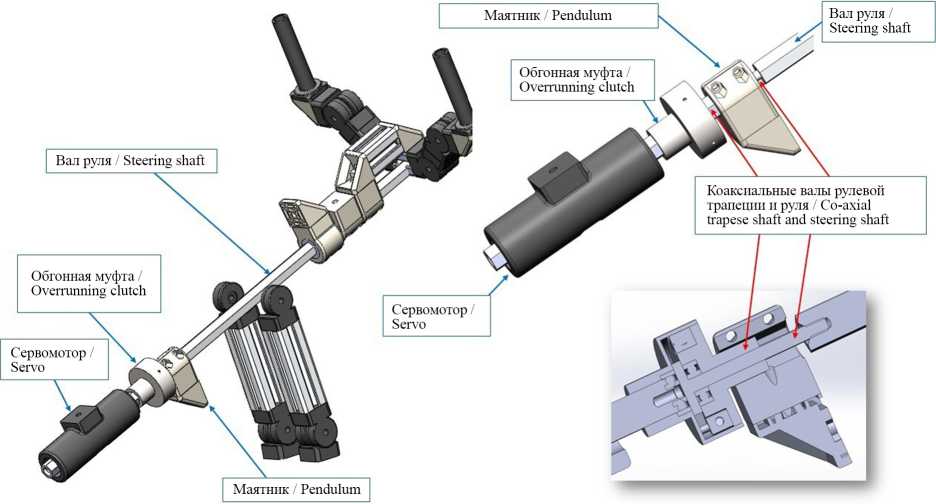
Р и с. 4. Обгонная муфта в контексте сборки всей конструкции
F i g. 4. Overrunning clutch in the context of the assembly of the complete structure
Круглый вал руля от муфты и шестигранный вал рулевой трапеции с цилиндрическим отверстием расположены относительно друг друга коаксиально. При повороте рулевых колес в ручном режиме управления силы трения колес о кон-тактируемую поверхность тормозят поворот полумуфты и вала рулевой трапеции, что обеспечивает разблокирование этого вала с полумуфтой и валом сервомотора.
В результате пилот получает возможность управлять электромобилем при фиксированном положении вала сервомотора, заданного автопилотом. В свободном состоянии руля пружины выталкивают ролики, механизм блокируется от взаимного поворота полумуфт, и сервомотор поворачивает вал рулевой трапеции вместе с валом руля на угол, заданный автопилотом.
Функциональность обгонной муфты обеспечивается множеством параметров. Среди них основными являются геометрические и массово-инерционные параметры деталей, а также жесткости пружин. Кроме того, помимо заданных габаритов, необходимо обеспечить передачу крутящего момента, достаточного для поворота рулевых колес.
Для определения необходимых крутящих моментов следует определить момент Мк на поворотном кулаке передней подвески и, соответственно, момент M r на валу руля в состоянии покоя (рис. 5). Из условий статического равновесия
Mr = Frhr = 2 Fshs = 2 Mk, где Fr и Fs – силы, создающие момент на маятнике и рулевой тяге, а hr и hs – плечи этих сил для моментов Mr и Mk соответственно.
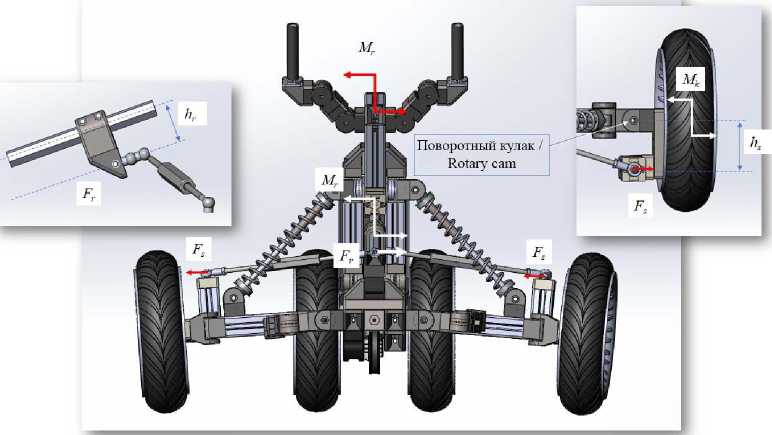
Р и с. 5. Крутящий момент на руле F i g. 5. Steering wheel torque
Примечание: Mk – момент на поворотном кулаке передней подвески; Mr – момент на валу руля; Fr и F s - силы, создающие момент на маятнике и рулевой тяге; hr и h s - плечи этих сил для моментов Mr и Mk соответственно .
Note: Mk – the torque on the steering cam of the front suspension; Mr – the torque on the steering shaft; Fr and Fs are the forces creating the moment on the pendulum and steering rod; hr and hs are the arms of these forces for the moments Mr and Mk , respectively.
Для определения момента на поворотном кулаке предлагается упрощенная модель, включающая в себя колесо, смонтированное на оси и несущей вилке (рис. 6).
Крутящий момент на валу вилки колеса может быть определен согласно известному соотношению [21]:
2 л R 2 я 3 ^
Mk = jjg pr2 drd ф=( ^p^d ф = 2 я p pR3 = 0,178743H • м = 178,7H • mm , 00 0 3 3
где μ = 0,8 (коэффициент трения покоя); p = 1,5 атм = 151 988 Па (давление в шине); R = 0,08885 м (радиус пятна контакта шины с поверхностью парковки). Таким образом, требуемая величина M r 0 = 358 Н·мм.
Результат численного эксперимента с использованием модели SolidWorks Motion (рис. 6) дает для искомой величины M k sw = 175 Н·мм.
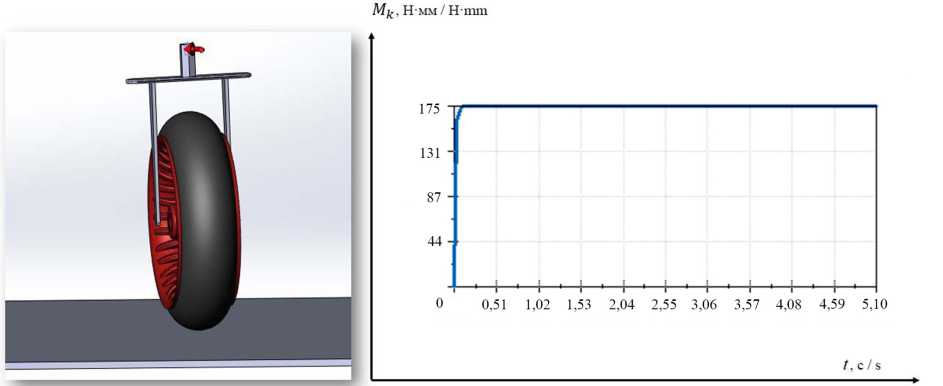
Р и с. 6. Крутящий момент на поворотном кулаке (вилке) F i g. 6. The rotary cam torque
Для определения необходимых параметров механизма разработана аналогичная представленной на рисунке 3 модель, позволяющая проводить численные эксперименты независимо от модели всей системы управления, включающей в себя колеса, подвески, рулевую трапецию и т. д. Исследование такой громоздкой модели требует существенных вычислительных затрат.
Рассматриваемая модель (рис. 7) дополнена несущей осью, тормозной колодкой, пружиной и винтом тормозной колодки. Силы трения тормозной колодки о поверхность несущей оси определяются силой сжатия пружины тормозной колодки. Соответствующий момент трения относительно оси вращения аналогичен тому самому «полезному» моменту Mr , передаваемому от полумуфты рулевой трапеции на вал рулевой трапеции.
Р и с. 7. Сборка обгонной муфты
F i g. 7. Overrunning clutch assembly
Результаты исследования. Для определения необходимой жесткости пружин при заданной силе прижима тормозной колодки была проведена серия численных экспериментов. Если крутящий момент приложен на валу серво, то вал руля фиксируется. И наоборот: если момент приложен на валу руля, то вал серво фиксирован. Первую задачу будем условно называть прямой, вторую – обратной.
Рисунок 8 иллюстрирует механизм разблокирования муфты при очень малой ( k = 0,05 Н·мм) жесткости пружин роликов. При этом сила прижима тормозной колодки задана значением P = 0. В этом случае функция разблокирования обеспечивается только инерционными свойствами вкладыша, поскольку трение во вращательной кинематической паре «ось несущая – вкладыш» в рамках данной модели также не учитывается, и сопряжение работает как идеальный подшипник скольжения.
При возрастании крутящего момента (первый сверху график на рисунке 8) происходит разблокировка муфты, и сила трения в кинематической паре «ролик – обойма полумуфты серво» быстро уменьшается (третий сверху график). На рисунке 8 приведен также график (второй сверху) зависимости от времени силы упругого сжатия пружины ролика. Вначале эта сила увеличивается, затем значение ее стабилизируется. В целом механизм разблокирования муфты показан в видеоролике6. Величина внешнего крутящего момента, соответствующая установившемуся движению, составляет 18 Н·мм.
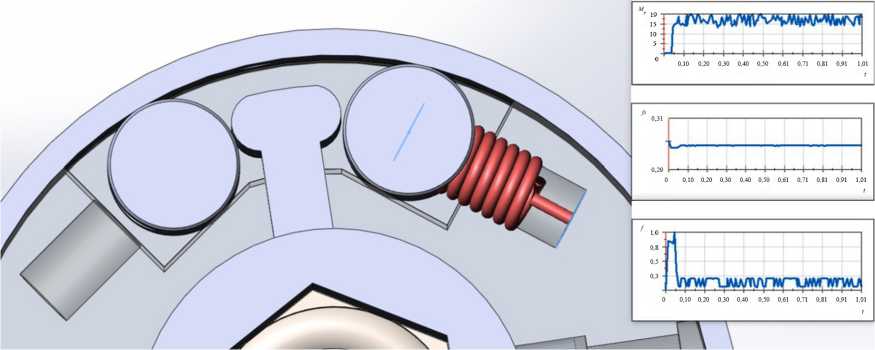
Р и с. 8. Механизм разблокирования муфты F i g. 8. Clutch release mechanism
В рассматриваемых условиях, то есть при малых значениях жесткости пружин роликов, функция разблокирования наблюдается явным образом. Однако при решении обратной задачи, то есть при фиксации вала руля и нагружении внешним крутящим моментом вала сервомотора, можно наблюдать слишком малую величину момента трения покоя, которая значительно меньше ранее определенного нами момента Mr0 = 358 Н·мм, необходимого для поворота рулевых колес. Так, в рассматриваемом случае (k = 0,05 Н·мм) величина крутящего момента трения, соответствующая переходу от статического трения к кинематическому, составила всего лишь 79 Н·мм.
Требуемый функционал муфты в рамках данной модели может быть обеспечен увеличением жесткости пружин роликов k и силы прижима тормозной колодки. При достаточно высоком значении момента трения в кинематической паре «вкладыш – несущая ось» будет обеспечено требуемое торможение вкладыша в начальном моменте движения и, как следствие, деформация пружин роликов с последующим разблокированием муфты. Так, при k = 1,00 Н·мм и силы прижима колодки P = 10 Н наблюдаем надежное разблокирование муфты в начальный момент движения и с моментом 310 Н·мм при установившемся движении (рис. 9). На рисунке 9 аналогично случаю, представленному на рисунке 8, при возрастании крутящего момента (первый сверху график на рисунке 9) происходит разблокировка муфты, и сила трения в кинематической паре «ролик – обойма полумуфты серво» быстро уменьшается (второй сверху график).
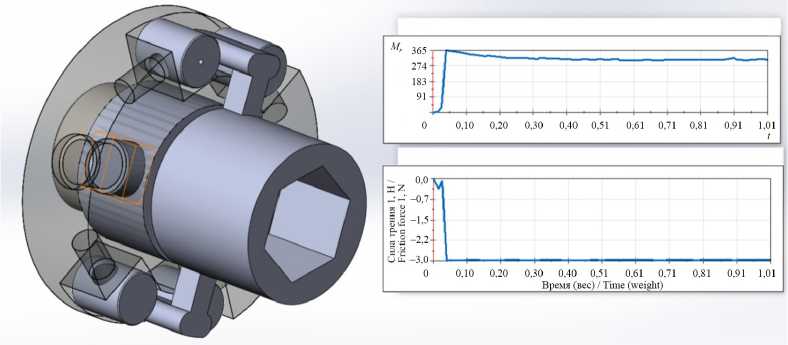
Р и с. 9. Крутящий момент приложен к валу руля F i g. 9. The torque is applied to the steering shaft
Рисунок 10 иллюстрирует решение обратной задачи. При этом крутящий момент, приложенный к валу сервомотора, достигает в статическом состоянии величины 403 Н·мм. Для получения «полезного» значение момента Mr , реализуемого сервомотором, необходимо вычесть из найденного значения величину момента трения, обусловленного прижимом тормозной колодки. На графике (первый сверху) это значение соответствует точке с абсциссой t = 0. Итак, в нашем случае полезная величина Mr = 403 – 79 = 324 Н·мм. На рисунке 10 приведена также зависимость от времени силы трения в кинематической паре «ролик – обойма полумуфты серво» (второй график сверху), которая быстро достигает максимальной величины, соответствующей силе трения покоя в начальной стадии движения.
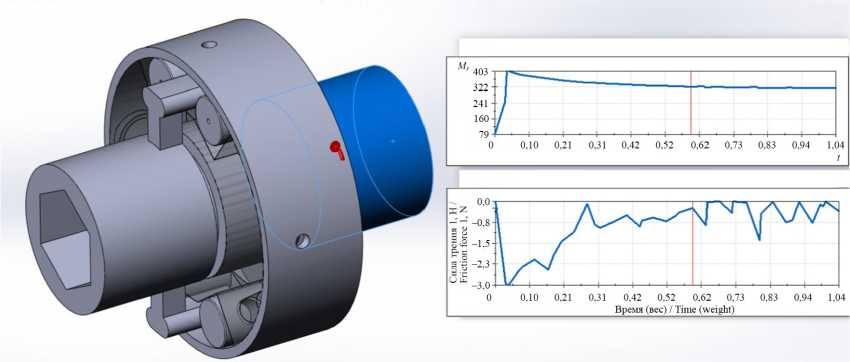
Р и с. 10. Крутящий момент приложен к валу сервомотора
F i g. 10. The torque is applied to the shaft of the servo motor
Для пары значений k = 2 Н·мм и P = 10 Н аналогичная разность для крутящего момента составила Mr = 500 – 79 = 421 Н·мм, что больше M r 0 и, таким образом, удовлетворяет заданным требованиям для поворота рулевых колес.
Проведенная серия численных экспериментов позволила исследовать качественные особенности механизма и сделать приблизительные оценки для параметров, задаваемых количественно.
Для испытания обгонной муфты в ее натурном исполнении был собран экспериментальный стенд (рис. 11). Стенд включает в себя обгонную муфту, вал со стороны сервомотора, вал со стороны руля, маятник с рычагом (в рулевом механизме он предназначен для поворота рулевой трапеции и рулевых колес), электронный динамометр.
Назначение стенда состоит в тестировании основной функции муфты – комбинированного управления, непосредственно связанного с блокировкой и разблокировкой муфты. Этот функционал уже был протестирован нами на виртуальной модели в процессе решения двух задач: прямой и обратной.
В процессе натурного эксперимента для прямой задачи вал сервомотора освобождается и, таким образом, свободно поворачивает как маятник, так и вал руля. Этот вариант работы муфты соответствует телематическому режиму управления. При этом динамометр фиксирует крутящий момент, передаваемый на рулевую трапецию.
В процессе натурного эксперимента для прямой задачи вал сервомотора фиксируется ключом (рис. 11). Это состояние соответствует фиксированному валу сервомотора при телематическом управлении. При этом вал руля свободно поворачивает маятник с рычагом, а динамометр фиксирует передаваемый на рулевую трапецию крутящий момент аналогично предыдущему эксперименту.
Полученные численные значения свидетельствуют о том, что передаваемый муфтой крутящий момент как в первом (ручном), так и во втором (телематическом) режимах управления в пересчете к требуемой величине крутящего момента M r 0 = 358 Н·мм, соответствует заданному необходимому значению этого момента.

Р и с. 11. Экспериментальный стенд для испытания обгонной муфты
F i g. 11. Experimental bench for overrunning clutch test
Процедуру тестирования электромобиля как в натурном, так и в виртуальном исполнении иллюстрирует видеоролик7.
Обсуждение и заключение. Разработана интегрированная натурная и CAx-модель прототипа электромобиля с комбинированным ручным и программным (дистанционным) управлением.
Обгонная муфта двунаправленного действия, установленная между валом сервомотора и валом руля, обеспечивает функцию «подрулирования» со стороны пилота наряду с дистанционным (программным) управлением.
Проведенные численные эксперименты с CAx-моделью и натурные эксперименты подтверждают работоспособность муфты и системы управления в целом.
Проект представляет собой законченную разработку, выполненную на базе принципов системного инжиниринга, позволяющего объект проектирования и все его подсистемы рассматривать как единое целое и в конструкторском, и в функциональном аспектах. Параметрические свойства разработанных CAx-моделей обеспечивают возможность масштабирования и адаптации проекта для решения широкого круга практических задач проектирования конструкций данного класса.
