Проведение ориентации и коррекции орбиты геостационарного космического аппарата: схема с неподвижным закреплением двигателей коррекции

Автор: Ермошкин Ю.М., Раевский В.А., Урусов В.М.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 (25), 2009 года.
Бесплатный доступ
Рассматриваются вопросы расширения сферы применения высокоэкономичных электрореактивных двигателей коррекции орбиты геостационарных спутников, а именно для создания управляющих моментов в интересах системы ориентации и стабилизации космического аппарата (КА) одновременно с проведением коррекций орбиты. Анализируется схема с неподвижным закреплением двигателей на корпусе КА. Приведена возможная методика организаций сеансов коррекции с учетом выполнения задач по созданию управляющих моментов. Анализируются преимущества и недостатки данного подхода к решению задач коррекции и ориентации.
Космический аппарат, двигательная подсистема, коррекция орбиты, управление ориентацией, размещение двигателей
Короткий адрес: https://sciup.org/148176011
IDR: 148176011 | УДК: 629.783.525
Geostationary spacecraft attitude and orbit control by motionless orbit control thrusters
There is considered the application of the geostationary SC orbit control thrusters to attitude and orbit control together. It is analyzed the scheme of motionless thrusters. It is given the possible method to fulfill the orbit control thrusters firings with a control moments creation. It is considered the preferences and deficiencies of this method.
Текст краткого сообщения Проведение ориентации и коррекции орбиты геостационарного космического аппарата: схема с неподвижным закреплением двигателей коррекции
Характеристики двигательных подсистем оказывают существенное влияние на характеристики платформы геостационарного КА. Масса заправленных ДУ может достигать 15–20 % от массы спутника, а потребляемая мощность ЭРДУ – до 4 кВт, поэтому даже некоторое снижение массы и энергопотребления двигательных подсистем позволяет высвободить значительные резервы для уменьшения массы конструкции КА или увеличения пропускной способности полезной нагрузки. Учитывая это обстоятельство, представляется важным и актуальным рассмотреть вопросы оптимального проектирования схем организации управления ориентацией КА и коррекции его орбиты с помощью двигательных подсистем. Вопросы такого рода возникают всякий раз в начальной фазе проектирования нового КА. На практике, решения носят в значительной мере субъективный характер, поэтому желательно более подробное их рассмотрение и внесение элементов формализации.
Известны три концепции организации ориентации и коррекции при помощи двигательных установок:
– отдельные двигательные установки для управления ориентацией и коррекцией орбиты;
– управление ориентацией (создание управляющих моментов) двигателями коррекции, неподвижно закрепленными на корпусе КА;
– управление ориентацией двигателями коррекции, установленными на одно- или двухстепенных приводах.
Каждый из этих подходов имеет свои преимущества и недостатки. Первый подход является традиционным, наиболее простым и применяется на многих КА, например, разработки ОАО «ИСС» (НПО ПМ) [1]. Он позволяет решать раздельно и независимо баллистическую задачу управления положением центра масс КА (задачу коррекции орбиты) и задачу управления угловым положением КА (задача ориентации).
Второй подход обещает некоторую экономию в массе за счет отказа от отдельной ДУ ориентации и стабилизации, но, вероятно, потребует усложнения методик проведения коррекций орбиты, так как одновременно с задачей коррекции должна решаться задача создания управляющих моментов для разгрузки маховиков системы ориентации. Такой подход применяется на КА «Ямал-100» [2]. Отметим, что в данном варианте все равно необходима небольшая вспомогательная двигательная подсистема ориентации, позволяющая создавать управляющие моменты в начальных режимах ориентации КА (после отделения от разгонного блока) и в режимах обеспечения живучести, то есть в ситуациях, когда включать плазменные двигатели нельзя из-за напряженного энергобаланса.
Третий подход является модификацией второго. Возможности по управлению ориентацией и резервированию несколько расширяются за счет применения приводов, однако неизбежно некоторое увеличение массы за счет появления дополнительных механических и электронных блоков. Возникают дополнительные потребности в ресурсах по управлению положением двигателей, требуют внимания вопросы отработки прочности конструкции, тепловых режимов, надежности и т. д. Установка двигателей коррекции на приводах применяется в основном на зарубежных КА [3].
Отметим, что при любом подходе необходимо соблюдать основной принцип надежности: отказ одного элемента (в данном случае двигателя) не должен приводить к невозможности выполнения задачи, то есть к невозможности выдачи тяги в любом из требуемых 4-х направлений (север–юг, запад–восток) и управляющих моментов по любой из трех осей.
Сравнительный анализ различных схем построения двигательных подсистем можно провести по критерию суммарной массы заправленных ДУ (или массы переменных составляющих по сравнению с выбранной базовой схемой). Очевидно также, что такой анализ реально провести только применительно к определенной (например, некоей типовой) компоновке КА.
Выберем в качестве базовой схему, представленную на рис. 1, т. е. независимые ДУ ориентации и коррекции. Рассмотрим возможность организации режимов коррекции и ориентации с учетом требований надежности в схеме с неподвижным закреплением двигателей коррекции. Эффективность исследуемой схемы будем характеризовать отличием массы блоков заправленной ДУ в сравнении с базовой схемой.
В качестве типовой формы негерметичного корпуса КА примем куб со стороной размером 2 м (рис. 1). Близкими к такой компоновке являются КА «Ямал» (РКК «Энергия») и КА на базе платформы «Экспресс-1000»
(ОАО «ИСС»). С северной и южной стороны (ось Z ) расположены панели солнечных батарей, ось вращения которых проходит через центр масс или близко к нему. С западной и восточной стороны (ось Y ), как правило, расположены антенны ретрансляторов. Поэтому одним из естественных решений является размещение двигателей коррекции по диагоналям квадрата, образованного сечением корпуса плоскостью YOZ . Такое решение, в частности, рассматривается в работе. Оно обеспечивает минимальное воздействие истекающих реактивных струй двигателей на панели и антенны. Возможны, разумеется, и другие схемы, например, с размещением двигателей вне плоскости YOZ , но в данной работе они не рассматриваются. В качестве двигателя коррекции примем наиболее распространенный отечественный плазменный двигатель М-100 (ОКБ «Факел»).
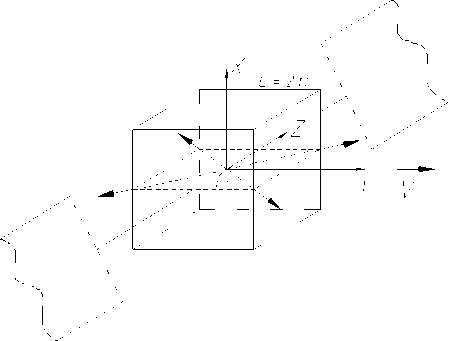
Рис. 1. Система координат и номинальные направления выдачи тяги двигателей коррекции орбиты в базовой схеме
Остановимся вначале на особенностях базовой схемы. Линии действия двигателей коррекции в данной схеме (рис. 1) номинально проходят через центр масс. Коррекцию наклонения целесообразно проводить включением пары двигателей направления + Z или – Z , долготы и эксцентриситета – пары направления + Y или – Y . При этом, каждый двигатель может участвовать как в выдаче импульса тяги по оси Z , так и по оси Y , в зависимости от того, в составе какой пары он включается.
Отдельно стоит вопрос о количестве двигателей коррекции. Очевидно, что минимальное количество двигателей – четыре. Проверим, выполняется ли при этом основное правило надежности.
При отказе одного из двигателей пары направления + Z , коррекция наклонения осуществляется парой направления – Z . Симметричная ситуация имеет место и при отказе одного из двигателей пары направления + Z .
Возможна коррекция наклонения и одним двигателем (например, по + Z ), однако, при этом для компенсации импульса в направлении Y (из-за наличия составляющей тяги на ось Y ) необходимо через 12 час при коррекции наклонения включить двигатель, имеющий составляющую на Y другого знака (в данном случае – направления – Z ).
При отказе одного из двигателей пары направления +Y (–Y) возможна коррекция долготы одним оставшимся двигателем. При этом составляющая импульса в направ- лении Z будет полезно использована при выборе соответствующего времени включения в течение суток.
Таким образом, действительно, 4 двигателя, установленных по диагоналям на ребрах корпуса в плоскости YOZ , обеспечивают выполнение задачи коррекции орбиты в 4-х направлениях с учетом выполнения основного требования надежности. Отказ любого одного двигателя не приводит к невозможности проведения коррекций долготы и наклонения.
Отметим, однако, что в данной схеме при отказе одновременно двух двигателей пары в направлении Y коррекция долготы будет невозможна, так как всегда необходимо иметь возможность выдачи тяги как в направлении + Y , так и – Y . Коррекция наклонения (то есть в направлении Z ) одним оставшимся двигателем данного направления также в этом случае будет невозможна, так как нечем будет компенсировать долготную составляющую тяги, которая будет иметь место при каждой коррекции наклонения.
С учетом данного обстоятельства при реальном проектировании, скорее всего, будет принято решение об установке 8 двигателей коррекции (попарно по каждой диагонали). Такое решение будет избыточно с точки зрения надежности, так как можно будет осуществлять коррекции долготы и наклонения даже при отказе любых двух двигателей. Однако с учетом того, что отказы могут произойти не одновременно, их можно рассматривать как два одиночных отказа, произошедших, например, из-за ресурсных факторов. Поэтому примем для базовой схемы 8 двигателей, расположенных попарно, приблизительно по каждому из направлений диагоналей в плоскости YOZ .
При использовании неподвижно закрепленных на корпусе КА двигателей коррекции для создания управляющих моментов, очевидно, что линия действия тяги каждого двигателя не должна проходить через центр масс, а иметь некоторое плечо. Учитывая то, что потребность в управляющих моментах возникает не всегда, а лишь в определенных ситуациях, то должна быть обеспечена возможность при осуществлении коррекций выдавать тягу без моментов. Поэтому коррекции необходимо в основном проводить парами двигателей, создающих противоположные моменты. При отсутствии необходимости выдачи управляющего момента время работы двигателей в сеансе должно быть одинаковым (при условии равенства по величине создаваемых моментов). При необходимости создания управляющего момента время работы двигателей данной пары должно быть разным. Величина импульса момента определится разностью времен работы двигателей. С учетом необходимости работы двигателей парами и выполнения основного правила надежности, очевидно, что общее количество двигателей коррекции для данной схемы не может быть менее восьми. По аналогии с базовым вариантом расположение двигателей (Д1–Д8) может быть принято по направлениям диагоналей в плоскости YOZ (рис. 2), а плечи созданы малыми (например, порядка 1 ° ) отклонениями двигателей в соответствующих плоскостях (рис. 3).
При отклонении на угол в пределах а = 1 ° изменением проекции тяги на оси Y и Z можно пренебречь. Величина управляющего момента при работе двигателя для выбранных исходных данных по геометрии корпуса КА составит:
M = F ■ L ■ tga = 8 - 141,4 ■ 0,01745 = 19,74 « 20 г • см.
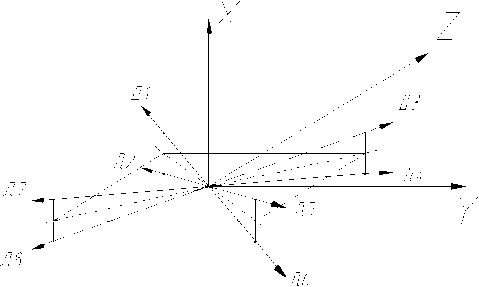
Рис. 2. Исходное размещение двигателей коррекции в схеме с неподвижным закреплением двигателей на корпусе КА
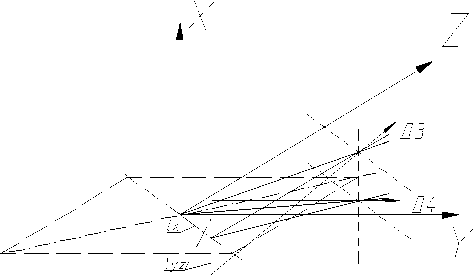
Рис. 3. Отклонения линий действия тяги неподвижно закрепленных двигателей для создания управляющих моментов (показано только для двигателей Д3, Д4)
При работе двух двигателей, создающих момент одного знака, величина момента удваивается. Достаточность управляющего момента 20 г∙см можно оценить сопоставлением этой величины с возмущающими моментами, возникающими при работе двигателей коррекции. Однако для расчета возмущающих моментов необходимо задать, и достаточно подробно, конфигурацию изделия. В рамках данного анализа это затруднительно, так как рассматривается абстрактный КА. Но известны, например, возмущающие моменты, рассчитанные для КА на базе платформы «Экспресс-1000»: максимальный возмущающий момент составил (по оси Y ) 14 г∙см при средней величине около 8 г∙см. В этом случае, очевидно, что величина управляющего момента около 20 г∙см (при выбранных исходных данных) достаточна для обеспечения управления угловым положением КА. Очевидно также, что в общем случае превышение управляющего момента над возмущающим можно обеспечить соответствующим выбором угла отклонения линии действия тяги относительно направления на центр масс.
Рассмотрим применительно к данной схеме возможность организации коррекции орбиты с одновременным созданием управляющих моментов и соблюдением основного принципа надежности.
В целом задача заключается в размещении двигателей таким образом, чтобы иметь возможность выдачи импульса коррекции в направлениях «север–юг» и «запад–восток» (± Z , ± Y ) как безмоментно, так и с выдачей управляющих моментов обоих знаков по трем осям. Отметим, что требование создания управляющих моментов по трем осям несколько избыточно. Для управления угловым положением геостационарного КА обязательным является возможность создания управляющих моментов по оси Z (тангаж), а управляющие моменты по осям X , Y (рыскание, крен) могут перераспределяться между собой маховичной системой управления (с учетом орбитального движения КА). Иными словами, можно ограничиться, например, созданием управляющих моментов только по крену и тангажу. Однако в рамках данного рассмотрения представляет интерес возможность решения более общей задачи создания управляющих моментов по трем осям. При этом очевидно, что если есть общее решение, то частное и более простое решение может быть всегда реализовано. Из условия ограничения потребляемой мощности примем, что допускается одновременная работа не более двух двигателей.
Принимая за основу исходную схему размещения двигателей коррекции (рис. 2), модифицируем ее для обеспечения создания управляющих моментов (рис. 3, 4, 5). В исходной схеме двигатели установлены на ребрах корпуса, главные направления выдачи тяги – по диагоналям квадрата, образованного сечением корпуса КА плоскостью YOZ . По каждому направлению установлены рядом два двигателя. Всего двигателей – 8. Исходя из габаритов двигательного блока и возможности монтажа на корпусе КА, каждый двигатель установлен так, что его ось номинально проходит через центр масс под некоторым углом к плоскости YOZ . Допустим, оси двигателей Д1, Д3, Д5, Д7 повернуты в сторону направления + Х , а Д2, Д4, Д6, Д8 – симметрично, в сторону – Х (рис. 2).
Q1. Д2 ‘ ПО.
Д7, № Д5 Об
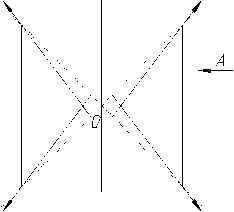
Рис. 4. Схема управления по рысканию
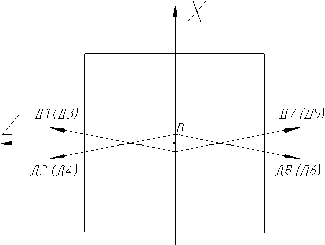
Рис. 5. Схема управления по тангажу и крену
Для создания управляющих моментов по оси Х (рыскание) пары двигателей Д1 + Д2, Д3 + Д4, Д5 + Д6, Д7 + Д8 следует развернуть вокруг осей, совпадающих с ребрами, на некоторый малый угол, например, на 1 ° , как было принято выше. Для симметрии, пары Д1 + Д2, Д3 + Д4 можно, например, развернуть в сторону + Z , пары Д5 + Д6, Д7 + Д8 – в сторону – Z (рис. 4). Пусть это будет первый поворот.
Для создания управляющих моментов по осям Z и Y (тангаж, крен) двигатели следует повернуть в плоскостях, образованных их осями и осью первого поворота (ребрами), на такие же малые углы в сторону + Х и – Х . Назовем это вторым поворотом. Для определенности развернем в сторону + Х двигатели Д1, Д3, Д5, Д7, а в сторону – Х – двигатели Д2, Д4, Д6, Д8 (рис. 5).
Исходя из представленной выше схемы, можно предложить, например, следующую методику создания управляющих моментов при осуществлении коррекций наклонения и долготы.
Управление по рысканию
Коррекция наклонения. Выдача импульса в направлении «юг» (–Z): сеанс коррекции разбивается на два участка: первый – работают двигатели Д1 + Д2 (время t 1) и второй - Д3 + Д4 (время t 2). Если t , = t 2 , управляющий момент не формируется, создается «чистый» импульс тяги в направлении -Z. Если t , > t 2 , то создается импульс момента + M X , если t 2 > t , , то - импульс момента - M X . Суммарная величина импульса момента определяется разностью времен t 1 и t 2 . Поскольку при работе каждой пары существует момент, то во время работы двигателей ( t 1 и t 2) маховичная система управления должна поддерживать заданную трехосную ориентацию КА. Если возможностей этой системы недостаточно для решения данной задачи, то сеанс коррекции должен быть разбит на большее количество интервалов (4, 6, 8), с тем, чтобы уменьшить импульс момента во время работы каждой пары до допустимой величины. Коррекция проводится парами двигателей (Д1 + Д2) или (Д3 + Д4) для того, чтобы исключить появление моментов по осям Y , Z .
Аналогично, выдача импульса тяги в направлении «север» (+ Z ) обеспечивается работой пар (Д7 + Д8) ( t 1) + +(Д5 + Д6) ( t 2). При t , > t 2 создается импульс положительного момента + M X , при t 2 > t , - импульс отрицательного момента - MX .
Отметим, что поскольку двигатели имеют составляющую тяги на ось Y , за счет разности времен t 1 и t 2 при проведении коррекции наклонения в данном случае образуется нескомпенсированный импульс тяги в долготном направлении. Для компенсации воздействия этого импульса, вероятнее всего, потребуется проведение специального сеанса коррекции долготы.
Коррекция долготы:
– выдача импульса тяги в направлении «запад»: (Д3 + Д4) ( 1 1 ) + (Д5 + Д6) ( 1 2). При t , > 1 2 создается импульс отрицательного момента - M X , при 1 2 > t , - импульс положительного момента + M X ;
– выдача импульса в направлении «восток»: (Д1 + Д2) ( 1 1 ) + (Д7 + Д8) ( 1 2). При t , > 1 2 создается импульс положительного момента + M X , при 1 2 > t , - импульс отрицательного момента - MX .
Управление по крену
Коррекция наклонения:
– выдача импульса тяги в направлении «юг» обеспечивается работой пар: (Д1 + Д3) ( t 1) + (Д2 + Д4) ( t 2). При t , > 1 2 создается импульс отрицательного момента - M Y , при 1 2 > t , - положительного момента + M Y ;
– выдача импульса тяги в направлении «север» обеспечивается работой пар: (Д5 + Д7) ( t 1) + (Д6 + Д8) ( t 2). При t , > 1 2 создается импульс положительного момента + M Y , при 1 2 > t , - отрицательного момента - M Y .
Коррекция долготы:
– выдача импульса тяги в направлении «восток» обеспечивается работой пар: (Д1 + Д8) ( t 1) + (Д2 + Д7) ( t 2). При t , > 1 2 создается импульс отрицательного момента - M Y , при 1 2 > t , - положительного момента + M Y ;
– выдача импульса тяги в направлении «запад» обеспечивается работой пар: (Д4 + Д5) ( t 1) + (Д3 + Д6) ( t 2). При t , > 1 2 создается импульс положительного момента + M Y , при 1 2 > t , - отрицательного момента - M Y .
Управление по тангажу
Коррекция наклонения.
В выбранной компоновке при коррекции наклонения обеспечить формирование «чистых» управляющих моментов по тангажу невозможно.
Коррекции долготы:
– выдача импульса тяги в направлении «восток» обеспечивается работой пар: (Д1 + Д7) ( t 1) + (Д2 + Д8) ( t 2). При t , > 1 2 создается импульс отрицательного момента - M Z , при 1 2 > t , - положительного момента + M Z .
– выдача импульса тяги в направлении «запад» обеспечивается работой пар: (Д3 + Д5) ( t 1) + (Д4 + Д6) ( t 2). При t , > 1 2 создается импульс положительного момента - M Z , при 1 2 > t , - отрицательного момента - M Z .
Резервирование
Коррекция наклонения.
При отказе одного двигателя направления «север» коррекцию наклонения без ограничений можно проводить по указанной выше методике двигателями направления «юг».
Коррекция долготы. При отказе одного из двигателей направления «запад» (допустим, Д1) выдача импульса в направлении «восток» возможна парой Д2 + Д8 или Д2 + Д7. Однако в первом случае возникнет момент по тангажу + M Z , а во втором - момент по крену + M Y . Указанные моменты необходимо будет компенсировать маховичной системой управления в пределах ее возможностей, а на длительность включения двигателей могут быть наложены ограничения. Величину момента, который необходимо компенсировать, можно уменьшить в 2 раза, включением вместо пары только одного двигателя, например, Д2, Д7, Д8. Однако при одиночном включении любого из указанных двигателей будут возникать моменты сразу по трем осям.
Аналогичная ситуация имеет место и при отказе одного из двигателей направления «восток». Ограничений со стороны системы ориентации можно избежать введением резервных двигателей коррекции долготы, линия действия тяги которых проходит через центр масс. Однако в этом случае количество двигателей коррекции увеличивается до 10.
Таким образом, можно сделать вывод о том, что в рассмотренной схеме размещения двигателей коррекции возможно проведение коррекций долготы и наклонения как без моментов, так и с созданием управляющих моментов обоих знаков по трем осям. При этом обеспечивается резервирование, при отказе одного двигателя, задействованного для коррекций наклонения (без ограничений), и при отказе одного двигателя, задействованного для коррекций долготы (с ограничениями по длительности коррекции в зависимости от параметров маховичной системы ориентации и стабилизации). Однако по сравнению с исходной схемой существенно усложняется планирование сеансов коррекции, так как необходимо обеспечить как выдачу импульса тяги в требуемых направлениях, так и создание управляющих моментов определенного знака.
Рассмотрим возможные преимущества, достигаемые при реализации рассмотренной выше схемы размещения двигателей коррекции. Ограничимся выбором 8 двигателей (рис. 2) без использования долготных резервных двигателей. Так как управляющие моменты формируются попутно при проведении коррекций (за счет малых отклонений осей двигателей от номинальных направлений), то рабочее тело специально на создание моментов в процессе штатной эксплуатации КА не затрачивается. Поэтому для сравнения исходного варианта с рассматриваемым достаточно сравнить массу заправленной монотопливной ДУ ориентации с массой газореактивной системы для обеспечения начальных и аварийных режимов ориентации. Очевидно, что в силу ограниченности задачи (требуемый суммарный импульс невелик), наиболее простым решением является использование того же самого рабочего тела (газообразного ксенона), который применяется для ЭРДУ коррекции. В этом случае не нужен отдельный дополнительный бак (при наличии определенного запаса емкости баков ЭРДУ). Примем, что емкости баков хватает для размещения дополнительных запасов газа и проведем такое сравнение для КА на базе платформы «Экспресс-1000».
Газореактивная система на холодном ксеноне
Блок подачи газа – 3 кг. Двигательный блок ориентации – 6 шт. по 0,5 кг. Всего – 3 кг. Суммарный импульс, который необходимо затратить на ориентацию в начальных и аварийных режимах зависит от массы КА, размещения сопел, количества реализаций указанных режимов. По оценкам, для КА массой 1–2 т необходимо на эти цели затратить 100–200 кг∙с. Возьмем для надежности верхнюю оценку. Масса ксенона, исходя из необходимости выработки, примерно 200 кг∙с и удельного импульса 25 с при температуре 20 єС – 8 кг; трубопроводы ~ 3 кг. Итого – 17 кг.
Монотопливная двигательная установка ориентации и стабилизации
Двигательный блок – 8 шт по 1,9 кг, всего – 15,2 кг; блок хранения и подачи – 16,3 кг; трубопроводы ~ 3 кг; топливо – 25 кг; вытеснитель – 0,15 кг. Итого – 59,65 кг.
Таким образом, разница в массе СК рассмотренных вариантов составит примерно 43 кг. Эта величина дает верхнюю оценку преимущества по массе варианта с неподвижно закрепленными двигателями коррекции, создающими управляющие моменты, по сравнению с исходным вариантом отдельных независимых двигательных установок для коррекции и ориентации применительно к КА на базе платформы «Экспресс-1000». В случае необходимости размещения дополнительного бака ксенона преимущество данного варианта перед исходным уменьшается на 16 кг и составляет 27 кг.
Очевидно, что в зависимости от построения конкретной платформы, величина весового преимущества, достигаемая за счет отказа от специальной ДУ ориентации и создания управляющих моментов двигателями коррекции, может изменяться в достаточно широких пределах. Однако можно ожидать, что по порядку величины она составит 30–40 кг. Если ввести два дополнительных блока коррекции в схему (рис. 2) (один блок – в направлении + Y , другой – в направлении – Y ) для обеспечения полного резервирования двигателей коррекции долготы, то преимущество будет близко к нижнему пределу (30 кг).
Проведенный анализ подтвердил, что использование неподвижно закрепленных на корпусе КА двигателей коррекции для создания управляющих моментов возможно. Такое решение может дать весовое преимущество до 30– 40 кг (для КА массой 1–2 т) за счет отказа от специализированной двигательной установки ориентации. Однако «ценой» этого преимущества окажется существенное усложнение методики планирования и осуществления коррекций орбиты: каждую коррекцию (до 2-х раз в сутки в течение всего САС) необходимо будет планировать индивидуально с привлечением специалистов по управлению движением и системе ориентации. Сеансы коррекции необходимо проводить только парами двигателей, что должно быть обеспечено системой преобразования и управления ДУ, наличием соответствующей мощности СЭП. Сеансы коррекции разбиваются на участки, при этом необходимо обеспечивать заданное время работы двигателей с достаточной точностью, не хуже единиц, или, по крайней мере, десятков секунд. Совмещение коррекций наклонения и разгрузки маховиков потребует проведения дополнительных коррекций долготы. Автоматизация проведения коррекций затруднительна. Применение данной концепции возможно на КА, для которых не предъявляется требование автономности в течение достаточно длительных интервалов времени.
