Проведение ориентации и коррекции орбиты геостационарного космического аппарата: схема с установкой двигателей коррекции на приводах

Автор: Ермошкин Ю.М., Раевский В.А., Урусов В.М.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 (30), 2010 года.
Бесплатный доступ
Рассматриваются вопросы расширения сферы применения высокоэкономичных электрореактивных двигателей коррекции орбиты геостационарных спутников, а именно: для создания управляющих моментов в интересах системы ориентации и стабилизации космических аппаратов одновременно с проведением коррекций орбиты. Анализируется схема с закреплением двигателей на приводах, обеспечивающих изменение положения двигателей относительно корпуса космического аппарата. Приводится возможная методика проведения сеансов коррекции с учетом выполнения задач по созданию управляющих моментов. Анализируются преимущества и недостатки данного и других подходов к решению задач коррекции и ориентации.
Космический аппарат, двигатель, двигательная установка, топливо, привод
Короткий адрес: https://sciup.org/148176264
IDR: 148176264 | УДК: 629.783.525
Geostationary spacecraft orbit slaving and maneuver: thrusters on drives installation scheme
In this article we consider increase of application of geostationary SC orbit slaving and maneuver thrusters, particularly for creation of control moments for slaving and maneuver system of SC simultaneously with orbit correction procedures. We analyze thrusters on drives installation scheme, which provides for alteration of engine position against spacecraft (pointing mechanism). We also present possible method for orbit slaving procedures with the account of control moments creation decision. And we analyze merits and demerits of the given and the other slaving and maneuver approaches.
Текст научной статьи Проведение ориентации и коррекции орбиты геостационарного космического аппарата: схема с установкой двигателей коррекции на приводах
-
– управление положением центра масс (задача коррекции орбиты);
-
– управление угловым положением (задача ориентации).
Как правило, для решения этих задач применяются отдельные независимые двигательные установки (ДУ коррекции и ДУ ориентации). При этом линии действия тяги двигателей коррекции проходят через центр масс КА, а двигатели ориентации установлены на определенных плечах для создания управляющих моментов. Однако иногда рассматриваются и другие варианты решения этих задач, например, использование двигательной установки коррекции не только по своему прямому назначению, но и для создания управляющих моментов. Потенциально такое расширение функций двигательной установки коррекции может дать определенное преимущество за счет экономии массы топлива ДУ ориентации или полного отказа от ее использования, так как управляющие моменты в интересах системы ориентации в этом случае можно будет создавать попутно в сеансах коррекции. Кроме того, в качестве двигателей коррекции на геостационарных КА, как правило, используются электрореактивные (плазменные или ионные) двигатели, которые обладают существенно большей экономичностью по сравнению жидкостными микродвигателями, обычно используемыми в ДУ ориентации. Однако такое совмещение функций может обладать и определенными недостатками, поэтому при создании КА перед проектантами возникает задача выбора варианта построения двигательных подсистем для решения задач ориентации и коррекции орбиты. «Цена» данного вопроса достаточно высока, так как выбор той или иной концепции влечет за собой последствия, связанные с разработкой сложных и дорогостоящих устройств. Поэтому выбор концепции должен иметь достаточное обоснование. Настоящая работа посвящена анализу преимуществ и недостатков концепции совмещения функций коррекции орбиты и создания управляющих моментов в единой (электрореактивной) двигательной установке коррекции орбиты геостационарного КА. Поскольку создание управляющих моментов возможно только при отклонении линии действия тяги двигателей от положения центра масс, то можно в принципе представить две возможные схемы проведения коррекций с одновременным созданием управляющих моментов: при неподвижном закреплении двигателей коррекции на корпусе КА на определенных, заранее выбранных плечах относительно центра масс; при установке двигателей коррекции на приводах, которые обеспечивают поворот двигателей коррекции на некоторый требуемый угол относительно номинального положения.
Первая схема рассмотрена в работе [1], поэтому данная работа посвящена рассмотрению схемы с приводами. В качестве базы для сравнения принята исходная схема, т. е. две независимые двигательные установки – для коррекции и ориентации. По итогам рассмотрения целесообразно сравнить все три схемы организации коррекций и ориентации между собой, для того чтобы выявить преимущества и недостатки каждой, а также очертить для них области рационального применения. При анализе возможности выполнения функциональных задач для каждой схемы необходимо учитывать основной принцип надежности (отказ одного элемента не должен приводить к отказу системы, т. е. к невозможности выполнения функциональной задачи), который приводит к необходимости резервирования двигателей.
Исходные данные. Так же, как и в работе [1], примем в качестве типовой конструкции негерметичного корпуса КА куб со стороной размером 2 м. Восемь двигателей коррекции расположим попарно по диагоналям квадрата, образованного сечением корпуса плоскостью YOZ (см. рисунок). В номинальном (исходном) положении линии действия тяги каждого двигателя проходят через центр масс. Каждую пару двигателей установим на двухстепенном приводе с углами прокачки до 3-5 ° по двум осям. Примем, что первая ось вращения привода параллельна оси Х и совпадает с ребром корпуса, а вторая – перпендикулярна соответствующей диагонали квадрата, образованного сечением корпуса плоскостью YOZ .
Методика создания управляющих воздействий. При отсутствии необходимости создания управляющих моментов линия действия тяги каждого двигателя проходит через номинальное положение центра масс. Возможна работа как одиночных двигателей, так и парами. При выбранном количестве двигателей резервирование обеспечивается с запасом. В случае необходимости создания управляющих моментов в процессе проведения коррекции платформа привода с установленными на ней двумя двигателями поворачивается на заданный угол.
Коррекция наклонения. Коррекция наклонения проводится парами двигателей Д1 + Д3 или Д2 + Д4 или Д7 + +Д5 или Д8 + Д6. Работа одиночных двигателей возможна, но нежелательна, так как при этом имеется значительная составляющая на ось Y .
Управление по рысканию. Для создания момента по каналу рыскания (М х ) во время проведения коррекции или заранее осуществляется поворот платформы привода (одного или двух сразу) относительно оси, совпадающей с ребром корпуса. Знак управляющего момента определяется направлением поворота.
Управление по крену. Для создания момента по каналу крена (М y ) при работе пар двигателей заранее осуществляется поворот платформы привода вокруг осей, перпендикулярных диагоналям. Знак момента также определяется направлением поворота.
Управление по тангажу. Управляющий момент по тангажу (М z ) может создаваться при работе одиночного двигателя и повороте платформы привода относительно оси, перпендикулярной диагонали. При этом создается момент сразу по двум осям Y и Z . Если необходим только момент по тангажу, то момент по крену должен компенсироваться электромеханическими исполнительными органами системы ориентации в пределах своих возможностей.
Коррекция долготы. В основном коррекции долготы могут осуществляться за счет разности времен работы двигателей в парах при проведении коррекций наклонения, так как составляющая тяги на ось Y в выбранной компоновке имеет такую же величину, что и на ось Z . Вместе с тем, могут осуществляться и специальные коррекции в направлении запад–восток парами Д3 + Д5, Д4+ + Д6, Д1 + Д7, Д8 + Д2 или одиночными двигателями.
Управление по тангажу. Управляющий момент по тангажу создается при повороте одновременно двух плат- форм, на которых установлены двигатели выбранной пары, относительно осей, перпендикулярных диагоналям. Отметим, что специальные коррекции в направлении за-пад–во сток парами двигателей, вероятно, будут весьма редкими, так как в основном, коррекция долготы будет осуществляться попутно, при проведении коррекций наклонения. Поэтому для проведения разгрузок маховика управляющие моменты по тангажу кроме указанных выше способов могут быть созданы специальными короткими включениями долготных пар двигателей.
Управление по рысканию. Управляющий момент по рысканию создается при повороте платформ с двигателями относительно осей, совпадающими с ребрами.
Управление по крену. Управляющий момент по крену при коррекции долготы создается при «перекрестном» включении двигателей в паре, например Д3 + Д6, Д4 + Д5, и отклонении платформ с двигателями относительно осей, перпендикулярных диагоналям, в разные стороны, например, блока с Д3 в сторону + Х , а блока с Д6 – в сторону – Х .
Таким образом, в выбранной схеме размещения двигателей коррекции на приводах обеспечивается как проведение коррекций по наклонению и долготе (с резервированием), так и создание управляющих моментов обоих знаков по трем осям при проведении штатных коррекций или специальных включений двигателей.
Отметим, что планирование сеансов коррекции по сравнению с вариантом неподвижного закрепления двигателей на корпусе КА значительно упрощено, так как задача создания моментов привязана к сеансам коррекции фактически только по времени, но не методически: не требуется разбиение сеансов на участки и обеспечение временных интервалов работы двигателей. Необходим только поворот платформ приводов на соответствующий угол до или при работе пар двигателей и возврат в исходное положение после завершения разгрузки маховиков. Преимуществом данной концепции также является возможность компенсации возмущающих моментов и ухода центра масс в течение срока службы КА.
Оценка массовых затрат. Оценим затраты массы для схемы с установкой двигателей коррекции на приводах. Так, например, масса двухстепенного привода, разрабо-
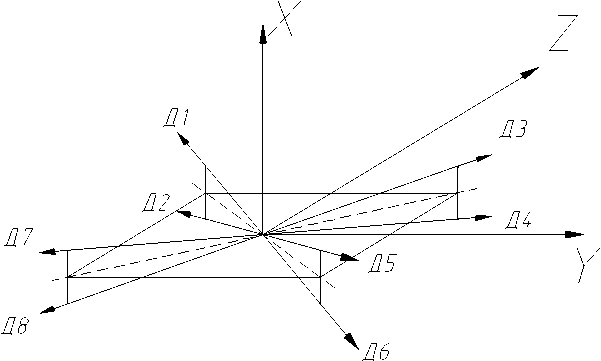
Исходная схема размещения двигателей и номинальные направления выдачи тяги
танного для европейской платформы Eurostar-3000, составляет 10,35 кг [2]. На нем можно разместить 2 двигателя. Массу блока электроники для управления данным приводом можно оценить в 2 кг. Массу рабочего тела, необходимого для создания управляющих моментов, не учитываем, так как полагаем, что моменты создаются «попутно», малыми отклонениями при проведении коррекций орбиты. Таким образом, общие затраты массы для управления 4-мя парами двигателей составят 49,4 кг. Однако, как было показано в работе [1], для создания управляющих моментов в начальных режимах и режимах обеспечения живучести все равно необходима вспомогательная, например, газореактивная система. Примем, что она работает на холодном ксеноне, так же как и в варианте с неподвижным закреплением двигателей коррекции. Для КА массой 1–1,5 т масса такой газореактивной системы по оценкам составит около 17 кг [1]. Таким образом, общие затраты массы для данного варианта составят соответственно 66,4 кг.
Масса монотопливной ДУ ориентации (базовый вариант) составляет около 60 кг [1]. Таким образом, при установке двигателей коррекции на приводы масса двигательной подсистемы в целом по сравнению с базовым вариантом отдельной монотопливной ДУ может увеличиться на несколько килограммов (приблизительно на 6 кг для выбранных исходных данных).
При сравнении с вариантом неподвижного закрепления двигателей коррекции на корпусе КА и обеспечением управляющих моментов проигрыш будет соответствовать суммарной массе приводов вместе с блоками электроники, т. е. около 50 кг для выбранных исходных данных.
Рассматривая совместно три схемы организации ориентации и коррекции, можно сделать следующие выводы.
-
1. Базовая схема, т. е. применение отдельной независимой монотопливной двигательной установки для ориентации и разгрузки маховиков и отдельной ДУ коррекции орбиты обеспечивает наибольшую простоту управления и эксплуатации КА, надежное управление ориентацией КА в начальных режимах и режимах обеспечения живучести. Режимы живучести могут проводиться неограниченное количество раз в пределах располагаемого запаса топлива. Имеется возможность функционального резервирования, т. е. использование двигателей ориентации в качестве вспомогательных двигателей коррекции. Независимость ДУ ориентации и коррекции позволяет автоматизировать процесс проведения коррекций орбиты с помощью БЦВМ, обеспечивая автономность КА.
-
2. Схема с неподвижным закреплением двигателей коррекции, создающих управляющие моменты, и вспомогательной газореактивной системой позволяет получить для КА среднего класса выигрыш по массе 30–40 кг по сравнению с базовой схемой. Однако существенно усложняется эксплуатация КА. Вследствие того, что коррекции будут совмещаться с разгрузкой маховиков, ежесуточные коррекции (до двух раз в сутки) будет необходимо на протяжении всего САС планировать индивидуально с участием специалистов по системе ориентации и специалистов по управлению движением. Автоматичес-
- кое проведение коррекций в данном случае будет существенно затруднено.
-
3. Схема с установкой двигателей коррекции на приводах упрощает планирование коррекций по сравнению с вариантом неподвижного закрепления и позволяет автоматизировать процесс проведения коррекций. Однако за счет введения приводов с их блоками управления масса возрастает по сравнению с вариантом независимых ДУ ориентации и коррекции на несколько килограммов, а по сравнению с вариантом неподвижного закрепления двигателей коррекции, создающих управляющие моменты, – примерно на 50 кг. Кроме того, привода с блоками электроники представляют собой достаточно сложные электромеханические устройства и вносят элемент ненадежности. В случае их отказа (например, заклинивания в определенном положении) эксплуатация КА существенно усложнится.
На основе полученных результатов анализа рассмотренных схем можно сделать вывод о том, что если к КА предъявляются требования автономности, то, по совокупности качеств, целесообразно использование схемы с независимыми ДУ ориентации и коррекции. Если остро стоит вопрос о массе КА, а требования по автономности не предъявляются (например, осуществляется непрерывное управление с НКУ), то возможно использование схемы с неподвижным закреплением двигателей коррекции, создающими управляющие моменты. Это позволит сэкономить массу, порядка 30–40 кг, но существенно усложнит эксплуатацию КА. Применение схемы проведения коррекций с двигателями на приводах возможно, однако увеличивает массу платформы, приводит к усложнению схем управления, снижению надежности платформы, повышению затрат на разработку и изготовление КА.
В целом, расширение сферы применения двигательной установки коррекции, т. е. использование двигателей коррекции не только по прямому назначению, но и для создания управляющих моментов возможно, однако, как показывает проведенный анализ, не всегда оправдано. Выбору того или иного решения должен предшествовать анализ условий функционирования КА и общих проектных требований.
