Пружинные аккумуляторы с выходным поворотным звеном

Автор: Пелупесси Данни Самуел, Жавнер Милана Викторовна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.18, 2016 года.
Бесплатный доступ
В статье рассмотрены пружинные аккумуляторы, их характеристики и области применения. Рассматриваются пружинные аккумуляторы с выходным поворотным звеном, предназначенные для шаговых приводов с рекуперацией энергии.
Пружинные аккумуляторы, потенциальная энергия, рекуперация, быстродействие
Короткий адрес: https://sciup.org/148204377
IDR: 148204377 | УДК: 621.01
Spring accumulators with the output rotary link
In article spring accumulators, their characteristics and scopes are considered. Spring accumulators with the output rotary link intended for stepper- drives with recuperation energy are considered.
Текст научной статьи Пружинные аккумуляторы с выходным поворотным звеном
-
1. Закон изменения потенциальной энергии в зависимости от угла поворота.
-
2. Зависимость усилия пружины от угла поворота выходного звена.
-
3. Жёсткость и максимальное усилие пружины.
-
4. Приведённый к оси выходного звена момент трения в шарнирах.
-
5. Закон изменения движущего момента, который при постоянном приведённом моменте инерции, аналогичен по виду закону ускорения.
-
6. Зависимость скорости выходного звена от угла поворота.
-
7. Время поворота на заданный угол, при заданных моменте инерции и жёсткости пружины.
Знание этих характеристик позволяет конструктору осознано выбирать те или иные пружинные аккумуляторы с учётом их основных характеристик и сравнительного анализа при конструировании пружинных приводов и уравновешивающих устройств.
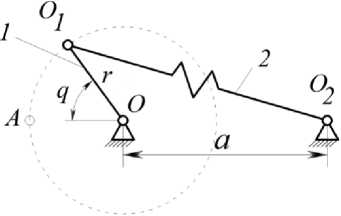
Рис. 1. Схема нелинейного пружинного аккумулятора с выходным поворотным звеном и пружиной растяжения
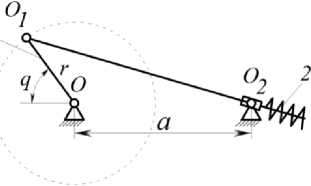
Рис. 2. Схема нелинейного пружинного аккумулятора с выходным поворотным звеном и с пружиной сжатия
Рассмотрим более подробно некоторые из этих характеристик. Момент, действующий на выходное звено, определяется выражением:
М = cL пр h (1)
где h - плечо вращающего момента определяется по рис. 3 из соотношения:
ar sin q = h ^r2 + а2 + 2ar cos q (2)
Для пружинных аккумуляторов, представленных на рис. 1 и 2, выходная моментная характеристика определяется следующим выражением:
М = acr sin q ( 1 - , a r =) (3)
\ ^r2+a2+2ar cos qj
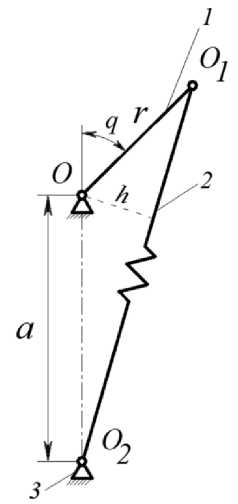
Рис. 3. Схема пружинного аккумулятора для определения геометрических характеристик
Для определения областей изменения межосе- вого расстояния, введем безразмерный коэффициент
a ' = - .
r
М = cr2 sin q • М'
) - уравнение, опреде-
где М' = a' I 1 - “r
I-
a ' -1
1+a '2 +2a ' cos q
ляющее значение момента в безразмерном виде.
На рис. 4 в общем виде показано семейство мо- ментных характеристик нелинейного пружинного ак- кумулятора при единичном значении радиуса поворотного звена при различных значениях межосевого расстояния, определяющих моменты на выходном звене. Необходимо отметить, что при увеличении межосевого расстояния амплитудное значение увеличивается и смещается к положению неустойчивого равновесия, при этом площадь, ограниченная каждой кривой, во всех случаях одинаковая – это и есть работа, которая равна максимальной потенциальной энергии.
Для сравнения различных видов пружинных аккумуляторов возьмём пружинный аккумулятор с синусной моментной характеристикой, представленный на рис. 5. Момент такого нелинейного пружинного аккумулятора определяется следующим выражением:
М = Mmax sin q (5)
Пружинный аккумулятор с такой характеристикой невозможно реализовать с углом поворота равным 2я по динамическим и конструктивным ограничениям. Однако грузовой аккумулятор позволяет реализовать привод с углом поворота равным 2л [6]. Пружинные аккумуляторы с синусной моментной характеристикой могут быть реализованы в системах уравновешивания звеньев при их вертикальном расположении или при угле поворота q <2и [4].
Определим законы изменения потенциальной энергии для пружинных аккумуляторов, представленных на рис. 1 и 2.
Для рассматриваемых пружинных аккумуляторов с одним поворотным рычагом (рис. 1, 2) при одинаковой жёсткости пружин c и радиусе поворота г, максимальная потенциальная энергия в положении неустойчивого равновесия равна:
V max = 2cr2 (6)
где с – жесткость пружины; r=OO 1 – радиус закрепления пружины на выходном звене; q – текущий угол поворота выходного звена.
Текущее значение потенциальной энергии определяется следующим выражением:
V = 0,5cL пр 2
Lпр = ^r2 + a2 - 2ar sin q - L0
где a=OO2 – расстояние между осями выходного звена и шарнирного соединения пружины с корпусом; L0 -минимальная длина пружины, a = r + L0
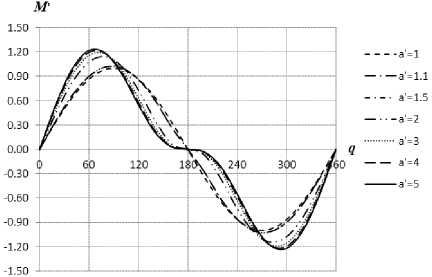
Рис. 4. Семейство моментных характеристик нелинейного пружинного аккумулятора с выходным поворотным звеном
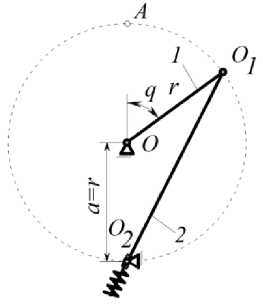
Рис. 5. Схема нелинейного пружинного аккумулятора с выходным поворотным звеном при a = r
Так как максимальное удлинение пружины в рассматриваемом пружинном аккумуляторе равно 2r, то Lo = 2^, Ку - коэффициент удлинения пружины. КоКу- у эффициент удлинения пружины в стандартных цилиндрических пружинах лежит в пределах от 0,5 до 4 [3]. Тогда значения а будут изменяться от 1,5r до 5r, а безразмерный параметр в пружинных аккумуляторах с пружинами растяжения a' е [1,5 .„ 5]. Для пружин сжатия a' е [1,1... 5].
С учётом уравнений (8), (9) уравнение (7), определяющее текущее значение потенциальной энергии, для пружинного аккумулятора примет вид:
V m = j (7r 2 + a2 + 2ar cos 4 - Lo) (10)
V m =^ v (ii)
где V = (V1 + a ' 2 + 2a ' cos q - (a ' - 1)) - уравнение, определяющее значение потенциальной энергии в безразмерном виде.
Текущее значение потенциальной энергии в зависимости от угла поворота для всех представленных выше схем будут определяться их конструктивными параметрами. Семейство графиков зависимости потенциальной энергии от угла поворота в общем виде представлено на рис. 6. Зависимость потенциальной энергии для синусного пружинного аккумулятора от угла поворота q определяется выражением:
V = 2cr2 • cos2 ^
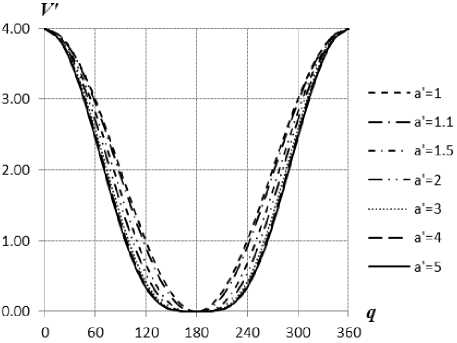
Рис. 6. Зависимость потенциальной энергии нелинейного пружинного аккумулятора от угла поворота: V = f(q)
Текущее значение усилия пружины, с учётом уравнений (8), (9) определяется следующим выражением:
Рпр = cL пр(13)
или
Р пр = c(7r 2 + a2 + 2arcosq - Lo) (14)
Рпр = сгВПр (15)
где Р пр = 71 + a ' 2 + 2a' cos q - a' + 1 - уравнение, определяющее значение усилия пружины в безразмерном виде.
Графики зависимости усилия пружины нелинейного пружинного аккумулятора от угла поворота представлены в общем виде на рис. 7.
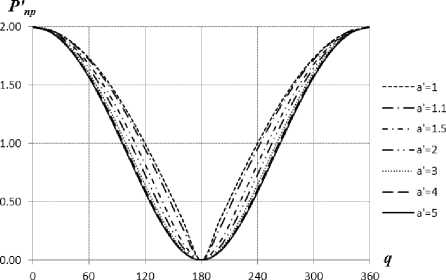
Рис. 7. Зависимость усилия пружины нелинейного пружинного аккумулятора от угла поворота: Р пр = f(q)
Для определения скорости выходного звена за- пишем уравнение полной механической энергии НПА, без учёта диссипативных потерь:
Vma x - V m = ^ (16)
Текущая угловая скорость определяется из уравнения (15) для полной механической энергии не- линейного пружинного аккумулятора и равна:
q=J
2(У тДх -У т )
Максимальная угловая скорость выходного зве- на имеет место при прохождении положения устойчи- вого равновесия и равна:
jfjcr2 q =.
-0,5c^7 r 2 + ct2 + 2ar cos Q-L q ) )
q =
•q'
1+a,2 + 2a ' cos q-(a ' -1)^
где q ' = J1 -^
уравнение, определяющее значение угловой скорости в безраз- мерном виде.
На рис. 8 в общем виде показано семейство графиков зависимости угловой скорости нелинейного пружинного аккумулятора от угла поворота. Зависимость угловой скорости выходного звена от угла пово- рота для синусного аккумулятора имеет вид:
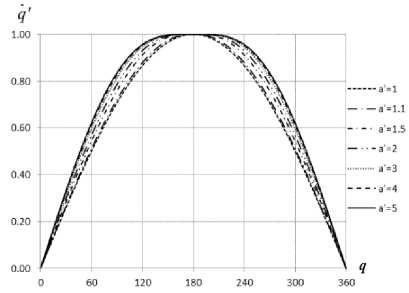
Рис. 8. Зависимость угловой скорости нелинейного пружинного аккумулятора от угла поворота: q = f(q)
Рассмотрим, какие законы движения можно получить с помощью нелинейных пружинных аккумуляторов с выходным поворотным звеном. При угле поворота, равным 2я , можно получить или точный синусоидальный закон ускорения (грузовой аккумулятор), или синусоидальный закон, в котором скорость и ускорение меняются непрерывно, и свои изменения начинают и оканчивают нулевыми значениями. Время поворота для нелинейного пружинного аккумулятора на угол 2т г определяется интегральным уравнением:
^ = (21)
Это уравнение можно записать в виде
' = \ ^'к« (22)
При решении данного интегрального уравнения для синусного аккумулятора в первом приближении получаем значение коэффициента Ktq = 24,5, для пружинного аккумулятора при a' = 5, получаем значение коэффициента Ktq = 19,6. Следует отметить, что увеличение а' приводит к увеличению быстродействия и уменьшению времени поворота. Решение уравнения (22) позволяет определить время поворота и, следовательно, жесткость пружины. Изменения конструктивного параметра – длины рычага r позволяет уменьшать или увеличивать жесткость пружины.
При создании пружинных приводов основными параметрами являются момент инерции и требуемое время поворота. Знание основных характеристик позволяет конструктору осознано выбирать те или иные пружинные аккумуляторы с учётом их основных характеристик и сравнительного анализа при конструировании шаговых приводов. В отношении плавности поворота пружинный привод на базе нелинейного пружинного аккумулятора с выходным поворотным звеном и углом поворота 2 я является идеальным, так как скорость, так и ускорение меняются непрерывно, и своё изменение начинают и оканчивают нулевыми значениями. Применение пружинных аккумуляторов оправдано их малыми габаритами и высоким быстродействием.
Рассмотренные выше нелинейные пружинные аккумуляторы имеют рабочий угол поворота равный q = 2я. Такие пружинные аккумуляторы могут использоваться, как в приводах с компенсацией диссипативных потерь в процессе движения, так и в приводах с их предварительной компенсацией. В последнем случае в положении устойчивого положения пружина должна иметь предварительный натяг.
Список литературы Пружинные аккумуляторы с выходным поворотным звеном
- А.с. 1544550 СССР. Резонансный привод/В.И. Бабицкий, А.А. Котлячков, В.А. Чечуров и др. Бюл. 1990. № 7.
- Жавнер, М.В. Методы расчета и проектирования исполнительных устройств робототехнических систем на базе пружинных механизмов: Автореферат дисс. на соиск. уч. степ. канд. техн. наук. -СПб.: Санкт-Петербургский государственный политехнический университет, 2003. 18 с.
- Жавнер, В.Л. Рекуперативные приводы для цикловых перемещений/В.Л. Жавнер, О.Н. Мацко, М.В. Жавнер. -Palmarium Academic Publishing. 2014. 90 с.
- Корендясев, А.И. Теоретические основы робототехники. В 2 кн./А.И. Корендясев, Б.Л. Саламандра, Л.И. Тывес. -М.: Наука, 2006. 376 с.
- Лойцянский, Л.Г. Курс теоретической механики. Том 2. Учебное пособие для вузов/Л.Г. Лойцянский, А.И. Лурье. -М.: Наука, 1983. 621 с.
- Феоктистова, Н.А. Гидромеханические рекуперативные приводы промышленных роботов для механизации погрузочно-разгрузочных работ: дис.. канд. тех. наук. -СПБ., 1988. 276 с.
