Пути повышения эффективности бескабельных телеметрических забойных телесистем подземной связи

Автор: Горячкин О.В., Григоров И.В., Долгополов В.Н., Петров О.А., Суханов Д.В., Хабаров Е.О.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 4 т.7, 2009 года.
Бесплатный доступ
Приведены исследования характеристик рассеяния реального канала ЗТС, экспериментальная оценка помеховой обстановки, описание программы моделирования канала связи, результаты моделирования для различных помех и разных сочетаний кодов.
Короткий адрес: https://sciup.org/140191354
IDR: 140191354 | УДК: 621.394.18
The ways to increase of effectiveness for MWD systems in drilling with EM channel
In this paper results of researches of characteristics of dispersion the real channel of measuring while drilling(MWD) systems, experimental estimation of noise conditions, the description of program for modeling of channel, the results of modeling for different noises and different sets of codes are showed.
Текст научной статьи Пути повышения эффективности бескабельных телеметрических забойных телесистем подземной связи
Для измерения технологических и геофизических параметров в процессе бурения в бескабель-ных забойных телеметрических системах (ЗТС) используется в основном электромагнитный канал связи, когда физической средой передачи информации служит горная порода. Основными досто-инствамитаких систем,в отличиеотакустических, гидравлических и кабельных, являются надежность конструкций и низкая стоимость. Вместе с тем электромагнитный канал связи обладает и некоторыми недостатками, такими как ограничение дальности действия из-за свойств геологического разреза, ее зависимость от материала бурильных труб, отсутствие возможностей исследования в соленосных отложениях. В системах глубинного бурения нефтяных и газовых скважин система передачи информации сверхдлинноволнового диапазона (СДВ) обеспечивает оперативное управление траекторией ствола наклонно-направленных и горизонтальных скважин в процессе бурения гидравлическими забойными двигателями. В процессе бурения для ориентирования бурильного обору-дования(отклонителя) система связиобеспечивает передачу телеметрической информации при необходимости изменения азимута ствола скважины или его зенитного угла; для ориентирования отклонителя на забое в вертикальных скважинах при зарезке ствола по заданному направлению; для определения угла закручивания бурильной колонны реактивным моментом забойного двигателя; для индикации динамических характеристик работы долота; измерения естественной радиоактивности пород. При передаче информации с забоя скважины используется канал связи сверхдлинноволнового диапазона. Средняя (несущая) частота передаваемого сигнала в таких системах составляет обычно 2,5-10 Гц (окно прозрачности 0,5-20 Гц). Более высокочастотные сигналы практически полностью поглощаются породой в процессе распространения на практически значимых расстояниях (1-5 км). При подаче электрического напряжения между верхней и нижней частями бурильной колонны (выполняющей роль антенны), разделенных диэлектрической вставкой, возникают токи, текущие в толще земли. Часть этих токов течет по поверхности и образует падение напряжения между скважиной и дополнительным электродом, установленным на расстоянии обычно 50-100 м от нее. На сегодняшний день на практике именно характеристики системы радиосвязи ограничивают такие важные показатели как глубину бурения и точность проводки скважины. При этом основным ограничивающим фактором является низкая помехоустойчивость системы связи и связанная с этим проблема повышения скорости передачи данных в таких каналах. В этой связи поиск путей повышения помехоустойчивости системы связи является актуальной научно-технической задачей, которую можно сформулировать как «повышение достоверности передачи данных в забойных телеметрических системах с электро-магнитным каналом связи».
Исследование характеристик реального канала ЗТС
Для решения этой задачи проведена статистическая обработка реальных сигналов, прошедших канал связи ЗТС,создан каталог основных типов аддитивных помех в канале связи ЗТС и определены их характеристики,проведен синтез математической и компьютерной модели канала связи ЗТС. В самом общем виде модель канала передачи информации в ЗТС может быть представлена в виде:
.y ( t ) = J h ( t - T ) x ( r ) dT + n ( t ) , (1)
-∞ где n(t) - аддитивная помеха, x(t) - информационный (передаваемый) сигнал на входе канала связи, h(T) - импульсная характеристика канала связи, y(t) - принимаемый сигнал в приемнике ЗТС [1]. В данном контексте для определения оптимальных схем кодирования и декодирования, модуляции и демодуляции необходимо определить вид и параметры импульсной характеристики канала связи,струк-туру и характеристики аддитивных помех.
Экспериментальные оценки характеристик рассеяния реального канала ЗТС
В данном разделе представлены результаты экспериментального исследования реальных каналов ЗТС. Основным объектом исследования является реакция канала ЗТС на сигнальный импульс (элемент) или реакция канала на функцию автокорреляции сигнального элемента. На рис. 1 представлен сигнальный импульс, используемый для передачи одного двоичного символа в ЗТС.
ся между пакетами данных для синхронизации. Синхросигнал на выходе передатчика ЗТС можно представить в виде:
M
S ( t ) = Z ak' S о ( t - k T ) , (2)
k= 1
где S o ( t — k T ) - сигнальный элемент (см. рис.1), a k – кодовая последовательность, роль которой выполняет М -последовательность длиной 64,
' з( 1 ) , a, = {1,0}, a, = 2I a, - I k i , J k ⎝ k 2⎠ ak =
1111110000 0100001100 0101001111 ...
...0100011100 1001011011 1011001101 0101
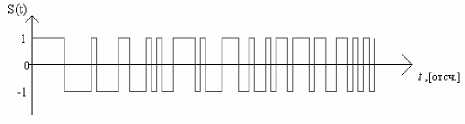
Рис. 2. Синхропосылка ЗТС
Сигнал на выходе канала связи с рассеянием можно записать в виде:
U( t ) = J s ( t ). h ( T - t ) dt =
-(3)
M +”
=Zak J So(t _ k T) ■h(T-tw=Zak g(T _ k T), k=1 —tok
+∞ где g(t) = JS0 (t) • h(t - т)dT - реакция канала на сигнальный! элемент, h(T) - импульсная характеристика канала связи. Тогда сигнал на выходе АЦП приемного устройства без учета эффектов квантования примет вид:
M
U ( ^ t • l ) = Z a k g ( ^ t l — k T ) , (4)
k=1
T где l = 1, M, а At = —, в случае дискретизации с интервалом в 40 отсчетов на длительность сигнального элемента.
Приемник, оптимальный в канале с гауссовским шумом, предполагает применение согласованного фильтра (СФ) для приема сигнального элемента. В этом случае отсчеты сигнала, прошедшего фильтр, согласованный с синхропосылкой, можно записать в виде дискретной линейной свертки
M -i
Z. = UM U, ., (5)
i k=1 0k k+i где i = 1, M -1, U0k - отсчеты опорной функции СФ. Тот же сигнал, прошедший СФ можно записать в виде
M
Zi = Ea (k)^g (At • i - k T), (6) k=-M где ^a (k) - автокорреляция кодовой последовательности, показанной на рис. 2, вычисленная по формуле
V a (О = E a k " a k + l , (7)
k =1
при этом l = -M , M • ^ g ( ^ t • i - k T ) - реакция канала на функцию автокорреляции сигнального элемента.
Синхросигнал, прошедший СФ, согласованный с этим сигналом показан на рис. 3.
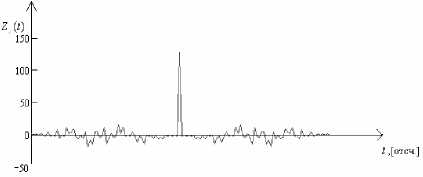
Рис. 3. Сигнал прошедший СФ
Реакция канала на функцию автокорреляции сигнального элемента можно представить в виде:
+∞
Y g ( t ) = J Z o ( t ) - h ( t - т ) dt (8)
-∞
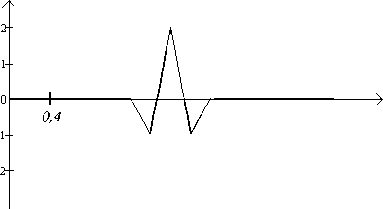
Рис. 5. Автокорреляционная функция сигнального элемента
Теперь мы можем найти реакцию канала на функцию автокорреляции сигнального элемента. Для этого составляющие выражения (6) можно записать в матричной форме.
Отсчеты сигнала на выходе СФ запишем в виде вектора:
Z
- p-M о
Z _ p.(M о-1)
Автокорреляция кодовой последовательности показана на рис. 4:
Z=
Z 0
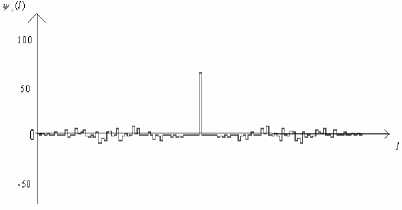
Рис .4. АКФ последовательности кодовых символов
Zp
где p – параметр сверхдискретизации (в рассматриваемом случае 20 или 40), M 0 – число отсчетов синхросигнала на выходе СФ. Автокорреляционную последовательность знаковой последовательности запишем виде матрицы (10).
|
V a ("2 ■ M o) |
V ( - 2 ■ M + 1) a o |
•" V a (-M0) |
• • • V (-1) a |
V a (0) |
||
|
V (-2 ■ Mg + 1) a |
V ( - 2 ■ M + 2) a o |
' " V a (-M 0 + 1) |
• V (0) a |
V ( + 1) a • |
⎥ ⎥⎥ |
|
|
V = a a |
• V a ( - Mo) |
V a ( - M o + 1) |
•1 • • — V (0) a |
• • • V a (M0 - 1) |
V a ( M0 ) |
⎥ (10) |
|
V a (- M 0 + 1) |
V a ( - M 0 + 2) |
• V (1) a • • • |
• v a ( M 0) |
Va (M0 + 1) |
⎥ ⎥ |
|
|
• V a (o) |
V ( + 1) a |
• V a ( + M0) |
• v (2 ■ Mn + 1) a0 |
• V a (2 ■ M0) _ |
⎥ ⎥ |
Реакция канала примет вид
|
⎡ ψ ψ ⎢⎢ g |
g ( M 0 • T ) ( M 0 - 1 • T ) ; |
. (11) |
|
|
ψ g = |
⎢ ⎢ ⎢ |
, g (0) ^ g (1) |
|
|
⎢ ⎢⎣ ψ |
g,...,, _ |
Тогда импульсная реакция на автокорреляционную функцию сигнального элемента будет равна произведению вектора отсчетов сигнала на выходе СФ и обратной матрице автокорреляции знаковой последовательности
Vg = Va - 1 Z ■ (12)
Сигнал на выходе фильтра, согласованного с синхропосылкой, показан на рис. 6.
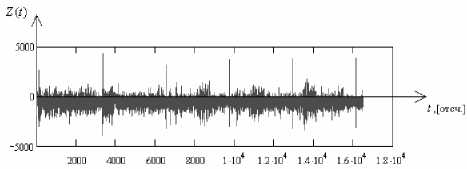
Рис. 6. Сигнал на выходе фильтра, согласованного с синхропосылкой
Используя формулу (12), получим восстановленную реакцию канала связи на автокорреляцию сигнального элемента, показанную на рис. 7.
Анализ полученных результатов позволяет сделать вывод о фактическом отсутствии рассеяния сигнала. Искажения формы сигнала вызваны, скорее всего, ограничением полосы пропускания канала связи, влиянием аддитивных помех, эффектами квантования. Из полученных данных можно сделать вывод о стационарности канала на интервале четырех синхропосылок.
Для построения оптимального алгоритма демодуляции актуально построение оценки канала не на автокорреляцию сигнального элемента, а на сам сигнальный элемент. В этой связи рассмотрим далее еще один способ оценки характеристик рассеяния в канале по синхропоследовательностям. Это позволит более детально проанализировать искажения сигнального элемента.
Особенностью синхропоследовательности, используемой в данной системе, является то, что последовательность, приспособленная исключительно для целей синхронизации, не содержит на границахсинформационнымипакетамисигналов пассивной (или специальной активной) паузы.
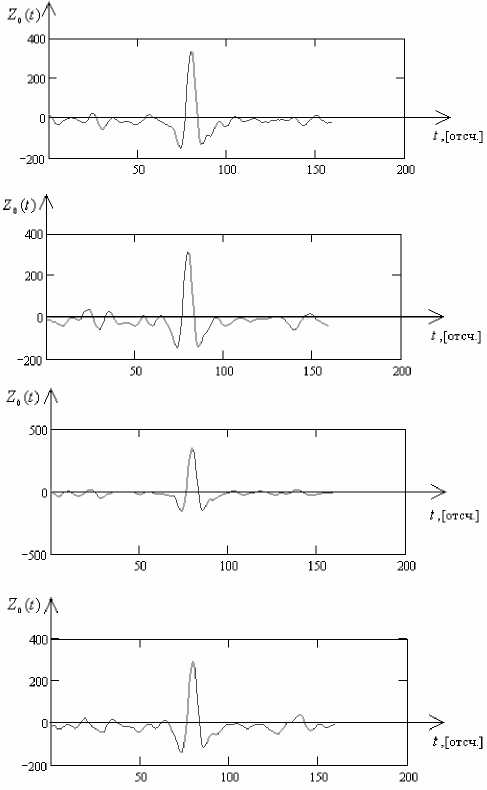
Рис. 7. Восстановленная реакция канала связи на автокорреляцию сигнального элемента по четырем синхропосылкам
Если в канале присутствует межсимвольная интерференция, то есть интервал рассеяния превышает тактовый интервал, то отклик фильтра, согласованного с единичным сигнальным элементом, будет включать в себя кроме полезной составляющей, составляющие, обусловленные информационным пакетом, предшествующим синхропоследовательности, и информационным пакетом, последующим за ней:
y = ys + У 1 + У 2 + u , (13)
где y S – отклик на синхропоследовательность, y 1 – отклик на предыдущий информационный пакет, y 2 – отклик на предыдущий информационный пакет, u – шумовая составляющая.
С учетом этого обстоятельства оценивание реакции канала связи на единичный сигнальный элемент осуществлялось по центральной части синхропоследовательности, которая была разбита на три составляющие:
s = s 1 u s 0 u s 2 , (14)
где s 1 – начальная часть синхропоследовательности, включающая в себя L 1 сигнальных элементов; s 2 – конечная часть синхропоследовательности, включающая в себя L 2 сигнальных элементов; s 0 – центральная часть синхропоследовательности, включающая в себя L 0 = L — L 1 — L 2 сигнальных элементов; где, в свою очередь, L = 64 – общая длина синхропоследовательности.
В предположении, что в канале связи присутствует существенная межсимвольная интерференция (МСИ), было положено
L 1 = 5; L 2 = 5; L 0 = 54 . (15)
Система синхронизации включает в себя фильтр, согласованный с центральной частью синхропоследовательности, импульсная характеристика которого, зеркальная по отношению к последней, записывается следующим образом:
g = [s5900...0s5800...s700...0s6], (16)
где s i – соответствующие отсчеты полной синхропоследовательности s , определяемой соотношением (13), а расстояние между ненулевыми значениями определяется количеством отсчетов на один тактовый интервал l s .
В результате последовательно формируются отсчеты вектора x , которые при поступлении на вход сигнала центральной части синхропоследовательности полностью совпадают с реакцией канала связи на единичный сигнальный элемент.
На рис. 8 представлен пример оценки реакции канала на сигнальный элемент. В рассматриваемом примере не наблюдается МСИ.
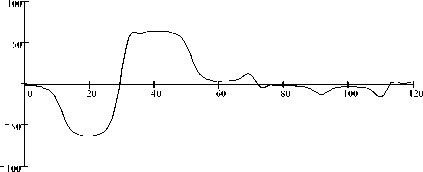
Рис. 8. Отклик канала на сигнальный импульс
Экспериментальные оценки помеховой обстановки, наблюдаемой в реальных каналах ЗТС
Канал ЗТС характеризуется наличием достаточно сильных помех, в результате действия которых происходят сбои синхронизации и теряются пакеты данных. Помехи в подобных системах имеют различные характеристики и разнообразное происхождение. По виду их можно классифицировать как импульсные, сосредоточенные по частоте, флуктуационные. Источники помех разнообразны. Это может быть сварочный аппарат (см. рис. 9), различные насосы, разнообразное электрооборудование, находящиеся на буровой. При этом часто источник помех оказывается неизвестен.
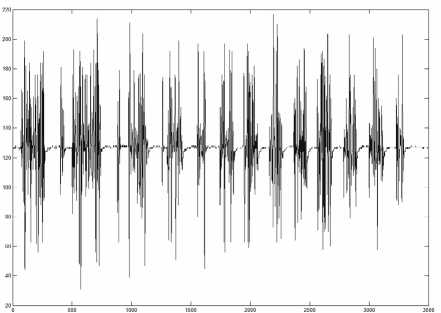
Рис. 9. Временные отсчеты импульсной помехи, обусловленной работой сварочного аппарата
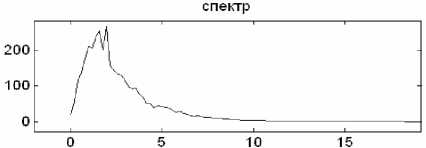
Рис. 10. Нормированная спектральная плотность мощности флуктуационной помехи неизвестного происхождения
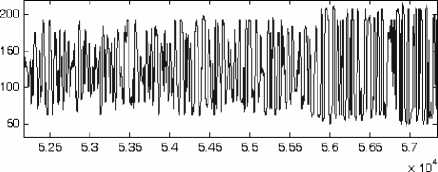
Рис. 11. Временные отсчеты флуктуационной помехи неизвестного происхождения
На рис. 10-11 показан пример мощной флуктуационной помехи неизвестного происхождения, действующей в полосе частот канала передачи.
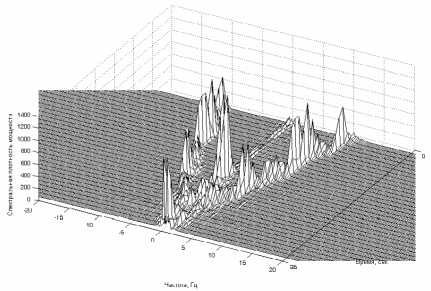
Рис. 12. Время-частотное распределение сосредоточенной по частоте, нестационарной помехи неизвестного происхождения, действующей в полосе частот канала передачи
На рис. 12 показано время-частотное распределение сосредоточенной по частоте, нестационарной помехи неизвестного происхождения, действующей в полосе частот канала передачи. Эту разновидность помехи можно отнести к классу помех, сосредоточенных по частоте с изменяющейся локализацией. Далее будет показано, что именно данный тип помех оказывает наибольшее разрушительное воздействие на помехоустойчивость приемников ЗТС.
Моделирование системы передачи
Для сравнения существующей системы и ее модификаций реализован приемник в среде
Matlab. При моделировании системы передачи в программе формируется файл с отсчетами сигнала передаваемых пакетов в смеси с аддитивной помехой, отсчеты которой берутся из заранее заданного файла. Для подсчета числа ошибок на выходе приемника формируется файл передаваемых информационных символов. В программе также можно задать необходимое отношение сигнал-помеха.
Затем реализуется декодер мягких решений демодулятора, который будет сравниваться с действующим приемником. Входными параметрами программы являются файл с сигналом передаваемых данных с помехой, который был сформирован ранее, и файл переданных информационных символов, используемых для сравнения с символами на выходе приемника и подсчета числа ошибок. Решения на выходе декодера сравниваются с переданными символами и подсчитывается число произошедших ошибок на выходе приемника. В программе можно включать/отключать входной фильтр.
Результаты моделирования
Результаты моделирования работы приемника на MATLAB и приемника ЗТС представлены в таблицах 1-5.
На рис. 13-17 показаны графики зависимости вероятности ошибки от отношения сигнал-помеха.
Таблица 1. Число ошибок на выходе приемников при действии помехи NOISE.S8
|
P c /P п , дБ |
–23 |
–20 |
–17 |
–14 |
–11 |
–8 |
–6 |
|
ЗТС |
67 |
63 |
61 |
57 |
42 |
28 |
8 |
|
Matlab (без фильтра) |
60 |
57 |
50 |
41 |
29 |
15 |
3 |
|
Matlab (с фильтром) |
61 |
58 |
53 |
49 |
32 |
20 |
6 |
Таблица 2. Число ошибок на выходе приемников при действии помехи 11010115.S8
|
P c /P п , дБ |
–23 |
–20 |
–17 |
–14 |
–11 |
–8 |
–6 |
|
ЗТС |
67 |
66 |
62 |
50 |
45 |
27 |
12 |
|
Matlab (без фильтра) |
61 |
58 |
53 |
46 |
30 |
11 |
2 |
|
Matlab (с фильтром) |
66 |
62 |
59 |
51 |
42 |
23 |
8 |
Таблица 3. Число ошибок на выходе приемников при действии помехи 05131704.S8
|
P c /P п , дБ |
–23 |
–20 |
–17 |
–14 |
–11 |
–8 |
–6 |
|
ЗТС |
44 |
27 |
20 |
12 |
9 |
5 |
3 |
|
Matlab (без фильтра) |
53 |
46 |
34 |
15 |
8 |
4 |
0 |
|
Matlab (с фильтром) |
44 |
30 |
20 |
14 |
9 |
7 |
4 |
Таблица 4. Число ошибок на выходе приемников при действии помехи 08071150.S8
|
P c /P п , дБ |
–17,5 |
–17 |
–16,5 |
–16 |
–15,5 |
–15 |
|
ЗТС |
3 |
3 |
1 |
1 |
0 |
0 |
|
Matlab (без фильтра) |
8 |
4 |
3 |
2 |
1 |
0 |
Таблица 5. Вероятность ошибки полубайта при действии белого шума в канале
|
P c /P ш , дБ |
–19 |
–18,5 |
–17 |
–16 |
–14,8 |
|
ЗТС |
0,363 |
0,351 |
0,175 |
0,075 |
0,013 |
|
Matlab, код (16,4,8) |
0,225 |
0,188 |
0,101 |
0,038 |
0,01 |
|
Сверточный код (4,1,16) |
0,142 |
0,078 |
0,0 |
0,0 |
0,0 |
|
Блочный код (24,4,12) |
0,064 |
0,043 |
0,011 |
0,0 |
0,0 |
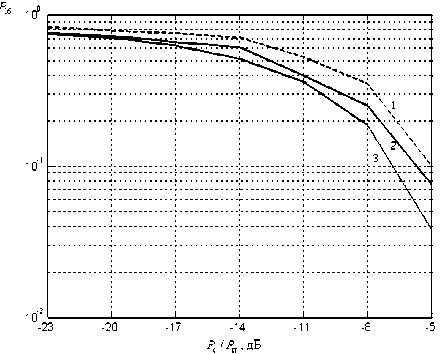
Рис. 13. Оценка вероятности ошибки полубайта на выходе сравниваемых приемников в зависимости от отношения сигнал-помеха; сигнал помехи взят из файла NOISE.S8
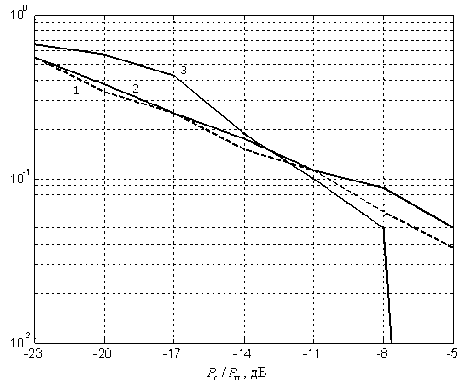
Рис. 15. Оценка вероятности ошибки полубайта на выходе сравниваемых приемников в зависимости от отношения сигнал-помеха; сигнал помехи взят из файла 05131704.S8
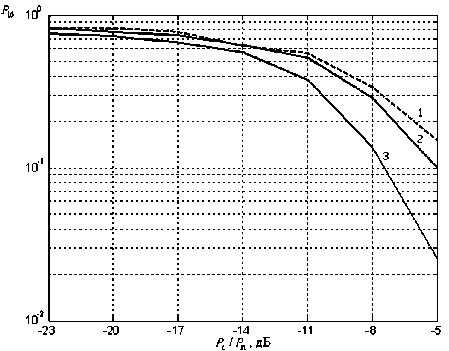
Рис. 14. Оценка вероятности ошибки полубайта на выходе сравниваемых приемников в зависимости от отношения сигнал-помеха; сигнал помехи взят из файла 11010115.S8
^ ^„.ДБ
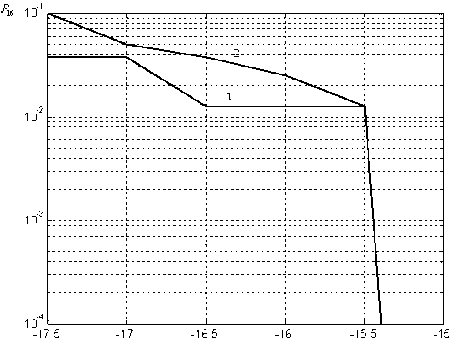
Рис. 16. Оценка вероятности ошибки полубайта на выходе сравниваемых приемников в зависимости от отношения сигнал-помеха; сигнал помехи взят из файла 08071150.S8: 1 – приемник ЗТС; 2 – приемник MATLAB с входным фильтром; 3 – приемник MATLAB без входного фильтра
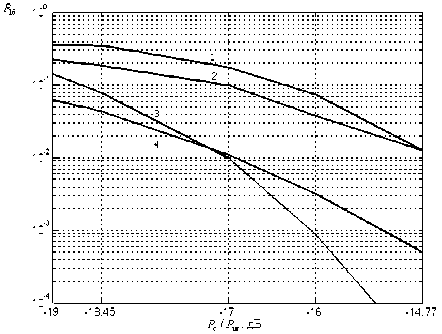
Рис. 17. Оценка вероятности ошибки полубайта на выходе сравниваемых приемников в зависимости от отношения сигнал-шум в канале с белым гауссовским шумом: 1 – приемник ЗТС; 2 – приемник MATLAB, блочный код (16,4,8); 3 – сверточный код (4,1,16), ν = 4; 4 – блочный код (24,4,12)
Для сравнения были выбраны несколько подходящих помехоустойчивых кодов: сверточный код (4,1,16) со скоростью R c = 1/4 и кодовым ограничением ν = 4, сверточный код (4,1,24) со скоростью R c = 1/4 и кодовым ограничением ν = 8, блочный биортогональный код (24,4,12).
В приемнике для этих кодов из файла с отсчетами сигнала на выходе канала считываются отсчеты сигнала, выполняется их демодуляция, декодирование, сравнения полученных символов с действительно переданными символами и подсчет числа ошибок.
Результаты моделирования различных кодов представлены на рис. 18-25. Моделирование проводилось для канала с АБГШ. При моделировании оценивался показатель качества – вероятность ошибки четырехбитного полубайта P 6. Число отсчетов на тактовом интервале выбрано равным L S = T I M = 40. Синхронизация пакетов идеальная.
На рис. 18 построены кривые вероятности ошибки полубайта P 6 от отношения сигнал-шум блочных биортогональных (16,4,8) и (24,4,12) кодов, сверточного кода (4,1,16) с кодовым ограничением ν = 4 и задержкой принятия решения D = 16, сверточного кода (4,1,24) с кодовым ограничением ν = 8 и задержкой принятия решения 16 и 32.
На рис. 19 представлены результаты моделирования биортогональных (16,4,8) и (24,4,12) кодов и сверточного кода (4,1,16) при действии узкополосной помехи с частотой 1 Гц в канале с АБГШ. Частота дискретизации равна 100 Гц.
На рис. 20-22 представлены результаты моделирования рассмотренных кодов при действии поме- хи в канале с АБГШ [1], взятой из файла. Отсчеты сигнала помех содержатся в файлах NOISE.S8, 11010115.S8 и 05131704.S8 соответственно.
Для получения большего выигрыша от кодирования можно использовать ортогональные и био-ртогональные коды с большими длинами. На рис. 23-25 построены зависимости вероятности ошибки m -позиционного символа от отношения «сигнал-шум».
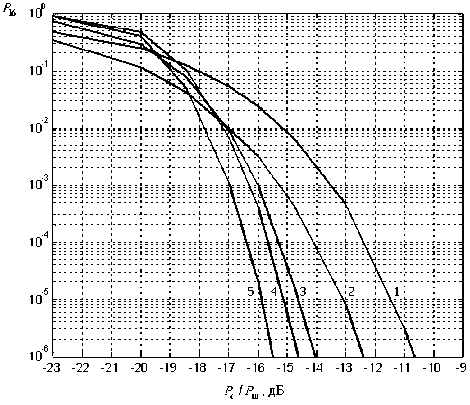
Рис. 18. Зависимость вероятности ошибки полубайта на выходе декодера мягких решений демодулятора от отношения сигнал-шум на выходе канала с АБГШ: 1 – блочный биортогональный код (16,4,8); 2 – блочный биортогональный код (24,4,12); 3 – сверточный код (4,1,16), ν = 4, D = 16; 4 – сверточный код (4,1,24), ν = 8, D = 16; 5 – сверточный код (4,1,24), ν = 8, D = 32
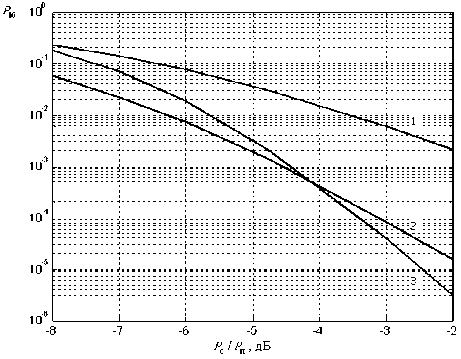
Рис. 19. Зависимость вероятности ошибки полубайта от отношения сигнал-шум, узкополосная помеха на выходе канала с АБГШ при отношении сигнал-шум P c / P ш = –10 дБ, частота узкополосной помехи f0 = 1 Гц, частота дискретизации f d = 100 Гц: 1 – блочный биортогональный код (16,4,8); 2 – блочный биортогональный код (24,4,12); 3 – сверточный код (4,1,16), ν = 4, D = 16
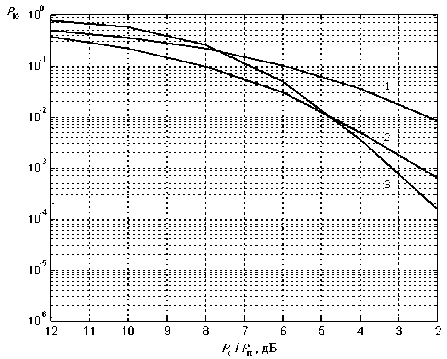
Рис. 20. Зависимость вероятности ошибки полубайта от отношения сигнал-помеха на выходе канала с АБГШ при отношении сигнал-шум P c / P ш = –10 дБ, файл помехи NOISE.S8: 1 – блочный биортогональ-ный код (16,4,8); 2 – блочный биортогональный код (24,4,12); 3 – сверточный код (4,1,16), ν = 4, D = 16
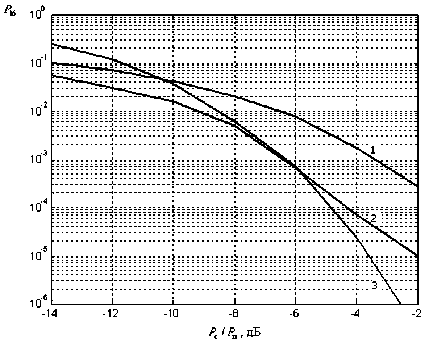
Рис.22. Зависимость вероятности ошибки полубайта от отношения сигнал-помеха на выходе канала с АБГШ при отношении сигнал-шум P c / P ш = –10 дБ, файл помехи 05131704.S8:1 – блочный биортогональ-ный код (16,4,8); 2– блочный биортогональный код (24,4,12); 3 – сверточный код (4,1,16), ν = 4, D = 16
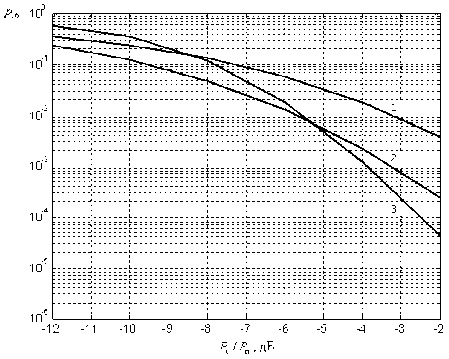
Рис. 21. Зависимость вероятности ошибки полубайта от отношения сигнал-помеха на выходе канала с АБГШ при отношении сигнал-шум P c /P ш = –10 дБ, файл помехи 11010115.S8: 1 – блочный биорто-гональный код (16,4,8); 2 – блочный биортогональ-ный код (24,4,12); 3 – сверточный код (4,1,16), ν = 4, D = 6
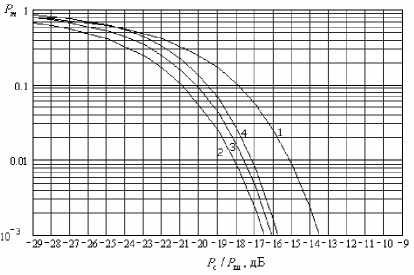
Рис. 23. Зависимость вероятности ошибки m -позиционного символа на выходе декодера мягких решений демодулятора от отношения сигнал-шум: 1 – биортогональный код (16,4,8), m = 16; 2 – био-ртогональный код (32,4,16), m = 16; 3 – ортогональный код (32,5,16), m = 32; 4 – биортогональный код (32,6,16), m = 64
Выводы
В результате проделанной работы экспериментально исследован канал подземной связи ЗТС, описать который можно следующим образом.
-
1. Канал ЗТС можно считать каналом, в котором практически отсутствует рассеяние, обусловленное временным запаздыванием сигнала в процессе распространения в среде.
-
2. Канал ЗТС можно отнести к классу полосовых каналов с почти финитной АЧХ, ограниченной полосой частот в диапазоне от 0,3 до 10 Гц, в зависимости от географии месторождения и глубины скважин.
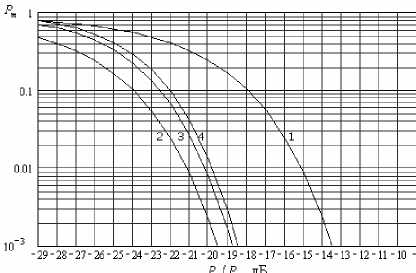
Рис. 24. Зависимость вероятности ошибки m -позиционного символа на выходе декодера мягких решений демодулятора от отношения сигнал-шум: 1 – биортогональный код (16,4,8), m = 16; 2 – био-ртогональный код (64,4,32), m = 16; 3 – ортогональный код (64,6,32), m = 64; 4 – биортогональный код (64,7,32), m = 128
-
3. Канал характеризуется наличием мощных по-мех.Помехи в подобных системах имеют различные характеристики и разнообразное происхождение.По виду их можно классифицировать как импульсные, сосредоточенные по частоте,флуктуационные.
-
4. Как показали результаты сравнительного моделирования качество работы приемника на MATLAB не хуже,а в большинстве случаях даже лучше,чем приемника ЗТС.
-
5. При использовании помехи из файла 05131704. S8 (см. рис.15)приемник на MATLAB без входного фильтра ошибался чаще (кривая 3),чем приемник ЗТС,что обусловлено наличием достаточно мощной узкополосной помехи в спектре входного сигнала. Использование входного фильтра позволило устранить большую часть (мощности)этой помехи,что привело к снижению числа ошибок (кривая 2).
-
6. Использование входного фильтра в приемнике, реализованного на MATLAB,приводит к ухудшению эффективности его работы.Это связано с потерей не менее 15% мощности сигнала и возникновением МСИ после входной фильтрации.Также входной
-
7. Использованиесверточногокода(4,1,16)вместо существующего биортогонального кода (16,4,8)вы-годно при отношениях «сигнал-шум» Р С / Р Ш > - 19 дБ.Начиная с этого отношения сигнал-шум (см.рис. 18)его кривая вероятности ошибки убывает значительно быстрее,чем кода (16,4,8). Использование сверточного кода с большим свободным расстоянием обеспечивает выигрыш по мощности более 3 дБ на уровне P 16 = 10 -4 .
-
8. Биортогональный код (24,4,12)по сравнению с кодом (16,4,8)обеспечивает выигрыш по мощности равный 2дБ на всем диапазоне отношения сигнал-шум. Кривая вероятности ошибки лежит ниже соответствующей кривой кода (16,4,8). Выбор этого кода вместо кода (16,4,8)дает выигрыш по вероятности более 2раз при вероятности ошибки 0,1.
-
9. При моделировании узкополосной гармонической помехи на фоне белого шума наибольший выигрыш по мощности в области малых отношений «сигнал-шум» обеспечивает код (24,4,12).Он составляет более 2,7 дБ на уровне 0,01 (см.рис.18).
-
10. В канале с аддитивными помехами и белым шумом (рис.20-22)наибольший выигрыш по мощности (от1,5 до 3 дБ),также как и в предыдущем пун-кте,обеспечивает код (24,4,12).
-
11. Если режим работы системы позволяет использовать более длинные коды,чем код (24,4,12),то в соответствии с кривыми вероятностей ошибки,пред-ставленными на рис.23-25,можно получить более существенный выигрыш по мощности:более 2дБ для кодов с длиной 32,более 5 дБ для кодов с длиной 64 и более 7,5 дБ для кодов с длиной 128.
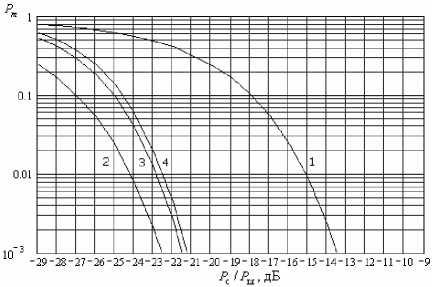
Рис. 25. Зависимость вероятности ошибки m -позиционного символа на выходе декодера мягких решений демодулятора от отношения сигнал-шум: 1 – биортогональный код (16,4,8), m = 16; 2 – биор-тогональный код (128,4,64), m = 16; 3 – ортогональный код (128,7,64), m = 128; 4 – биортогональный код (128,8,64), m = 256
фильтр вносит дополнительную задержку в прием-нике.С учетом всего сказанного,входной фильтр целесообразно использовать при действии мощных узкополосных помех в канале.
Список литературы Пути повышения эффективности бескабельных телеметрических забойных телесистем подземной связи
- Теория электрической связи. Под ред. Д.Д. Кловского. М.: Радио и связь, 1998. -432 с.
