Радиолокационные системы дистанционного зондирования Земли на базе спутников со стабилизацией вращением

Автор: Полончик Олег Леонидович, Артюшкин Андрей Борисович, Нечай Александр Анатольевич, Полончик Евгения Олеговна
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
В статье представлена математическая модель для исследования характеристик бортовой РЛС на основе синтезированной кольцевой антенной решётки P-диапазона для изучения ледовых покрытий; получены основные расчетные соотношения. Теоретический анализ подкреплен результатами моделирования в среде Matlab. Подтверждена адекватность использования разработанной модели на основе оценки получаемых характеристик бортовой РЛС.
Круговой обзор земной поверхности, математическая модель, радиолокационная станция, синтезированная круговая антенная решётка
Короткий адрес: https://sciup.org/148160289
IDR: 148160289 | УДК: 629.78
Radar systems of Earth’s remote sensing on the base of using satellites with rotation stabilization
The article presents a mathematical model to study the characteristics of the onboard radar based on the synthetic ring array R-band for the study of ice coatings; the basic design calculations are obtained. The theoretical analysis is supported by the simulation results in Matlab. The adequacy of using the developed model based on the evaluation of the obtained characteristics of the onboard radar is comfirmed.
Текст научной статьи Радиолокационные системы дистанционного зондирования Земли на базе спутников со стабилизацией вращением
Введение 1234
Хозяйственная деятельность в Арктике в настоящее время стала экономически выгодной. Это определяется расширением круга заинтересованных нефтедобывающих компаний и огромными запасами углеводородов, разведанных на шельфе полярных морей. Климатический цикл потепления дал существенный толчок интен- сификации перевозок по Северному морскому пути, развитию полярного туризма. Повышение температуры должно привести к увеличению числа айсбергов, выходящих на судоходные трассы и в районы нефтяных и газовых платформ. Увеличение риска столкновения с айсбергами предполагает организацию разработок технологий раннего обнаружения опасных ледовых образований и их сопровождения. Наиболее эффективными способами обнаружения опасных ледяных образований являются спутниковые методы. На практике использование данных обработки экспертными системами полученной информации наиболее актуально тогда, когда эти данные могут быть получены в реальном масштабе времени или близком к нему.
ВЕСТНИК 2017
Известны непрямые дистанционные методы изучения морского льда [1]. К ним относятся авиационные наблюдения за ледяным покровом, спутниковые методы видимого диапазона, спутниковые методы инфракрасного и микроволнового диапазона. Проведенный анализ показал, что наиболее перспективными методами получения оперативной достоверной информации являются радиолокационные методы, так как они не зависят от времени суток, сезона, года, наличия облачности.
Характеристики ледяного покрова можно вычислить, применяя методы математической обработки изображений космических радиолокационных станций с синтезированием апертуры (РСА), то есть по косвенным признакам. Так, например, определяется сплоченность ледяного покрова, толщина льда. Подходом, позволяющим получить прямые измерения параметров ледяных покрытий, является использование РСА в диапазоне P и ниже.
Постановка задачи разработки алгоритма исследования характеристик бортовой РЛС на основе синтезированной кольцевой антенной решетки P-диапазона
Анализ пригодности различных диапазонов радиоволн к использованию в целях дистанционного зондирования Земли (ДЗЗ) выявляет сильную зависимость отражающей способности большинства земных поверхностей от частоты излучения – она увеличивается с увеличением частоты колебаний. Аналогичную зависимость отражающая способность земной поверхности имеет и от угла скольжения [1].
Используемые в ДЗЗ диапазоны электромагнитных волн имеют различную проникающую способность, которая обычно кратна четверти длины волны. Глубина проникновения зависит от шероховатости поверхности и комплексной диэлектрической проницаемости, которая сильно зависит от влажности.
Современные РСА в основном создаются для диапазонов С и К, где радиоволна имеет незначительную глубину проникновения. Механизм отражения электромагнитной волны от ледовых поверхностей и снежного покрова определяется их низкой диэлектрической проницаемостью. Снежные покровы для этих диапазонов практически прозрачны (ɛ = 1), ледовые образования, как правило, имеют слоистую структуру, и для них ɛ = 3–4,5. При этом существующие различия сильно зависят от возраста льда, что позволяет классифицировать типы ледовых образований. Способ определения параметров оказывается косвенным. С этой точки зрения наиболее интересным для изучения ледовых образований является диапазон P.
Уровень мощности сигнала, приходящего на приемную антенну космического РСА, сильно зависит от поляризации излучения. В общем случае, коэффициент рассеяния земной и водной поверхностей при вертикальной поляризации выше, чем при горизонтальной или перекрестной.
Характеристики ледяного покрова можно вычислить, применяя методы математической обработки изображений космических РСА, то есть по косвенным признакам. Так, например, определяется сплоченность ледяного покрова, толщина льда.
Подходом, обеспечивающим получение прямых измерений параметров ледяных покрытий, является разработка РСА, работающих в диапазоне P и ниже. Однако в настоящее время данный вопрос проработан недостаточно. Это связано с тем, что создание рабочей апертуры предполагает использование антенн, имеющих большие геометрические размеры, что затрудняет их использование на борту искусственного спутника Земли (ИСЗ). Однако использование ИСЗ со стабилизацией вращением вокруг выбранной оси значительно расширяет возможности РЛС с синтезированной апертурой.
Исследование характеристик бортовой РЛС с синтезированной кольцевой антенной решеткой P-диапазона предполагает сравнение кругового и бокового методов обзора земной поверхности с ИСЗ и вычисление следующих характеристик:
-
– площадь просматриваемой поверхности;
-
– доплеровский сдвиг частоты, вызванный движением ИСЗ;
-
– доплеровский сдвиг частоты, вызванный вращением ИСЗ;
-
– время нахождения цели в проекции ДН антенны;
-
– угловое разрешение способа кругового обзора при использовании методов оптимальной фильтрации.
Сравнительная оценка площадей просматриваемой поверхности при использовании кругового и бокового методов обзора земной поверхности с ИСЗ
Диаграмма направленности антенны, устанавливаемой на ИСЗ со стабилизацией вращением, сканирует земную поверхность за счёт вращения аппарата вокруг оси. Разрешающая способность такой системы зависит от размеров апертуры – чем она больше, тем разрешаю- щая способность выше и наоборот. От размеров апертуры зависит и площадь просматриваемой земной поверхности.
Таким образом, реализация высокой разрешающей способности приводит к существенному уменьшению просматриваемой площади, что ведет к потере информации о соседних участках.
Для иллюстрации данного утверждения на рис. 1 представлены размеры просматриваемых площадей земной поверхности для антенн с различной шириной диаграмм направленности.
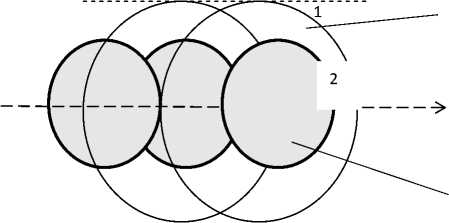
Рис. 1. Проекция диаграммы направленности антенны измерительного прибора на земную поверхность:
1 – область сканирования антенной с широкой диаграммой направленности;
2 – область сканирования антенной с более узкой диаграммой направленности
На рис. 2 представлен вариант результатов работы РЛС бокового обзора. Цветом здесь обозначены участки Земли, попадающие в области сканирования апертур антенных решеток, синтезированных на основе антенн, расположенных по разные стороны движущегося ИСЗ. Для этого способа характерно наличие непросматриваемой подспутниковой зоны с низким разрешением.
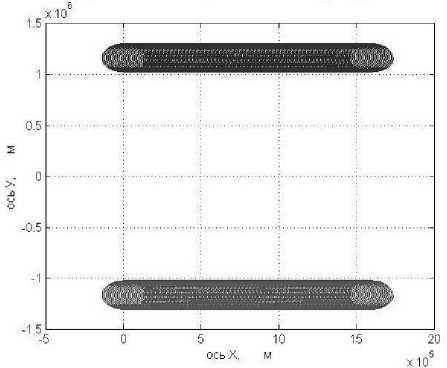
Рис. 2. Проекция диаграммы направленности антенны на земную поверхность для ИСЗ с РЛС бокового обзора
Установка антенны устройства дистанционного зондирования Земли на ИСЗ таким образом, чтобы ее диаграмма направленности не совпадала с осью вращения корпуса КА, позволит использовать вращательное движение для сканирования подстилающей земной поверхности. В данном случае можно добиться того, что диаграмма направленности антенны прибора будет сканировать подстилающую земную поверхность без пропусков. Проекция диаграммы направленности на земную поверхность для данного метода представлена на рис. 3.
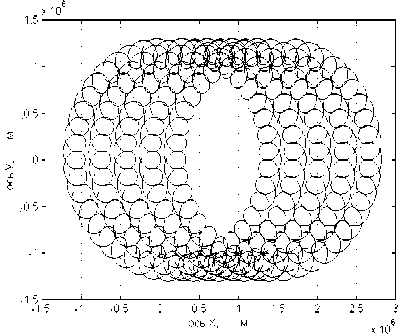
Рис. 3. Проекция диаграммы направленности антенны на земную поверхность ИСЗ с РЛС кругового обзора
Такой подход позволяет за счет использования более узких диаграмм направленности антенн либо длиннофокусной оптики и более полного охвата подспутниковой поверхности Земли существенно повысить как площадь области сканирования, так и разрешение радиолокационных и оптических изображений (рис. 4).
ВЕСТНИК 2017
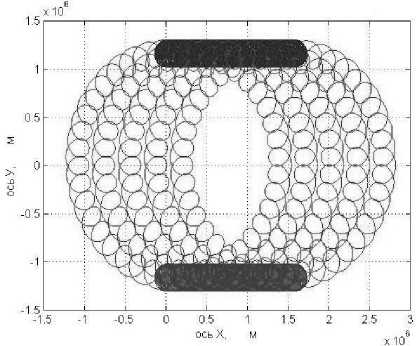
Рис. 4. Сравнение площадей при просмотре диаграммами направленности антенн на земной поверхности ИСЗ с РЛС кругового и бокового обзора
Для определения основных соотношений и углов рассматриваемых методов будем считать, что ИСЗ движется по невозмущенной круговой орбите на высоте h вокруг Земли, которая имеет форму сферы. Для дальнейшего анализа методов необходимо найти углы γmax и δmax (рис. 5), расстояние от ИСЗ до источника радиоизлучения АВ ; расстояние от подспутниковой точки до источника радиоизлучения – дуга DB , время пребывания источника радиоизлучения в зоне радиовидимости ИСЗ.
Пусть рассматривается вариант, соответствующий максимальной площади просмотра подстилающей земной поверхности с высоты h . В данном случае прямая АВ – касательная к окружности с центром в точке О , треугольник АВО – прямоугольный [2].
ВЕСТНИК 2017
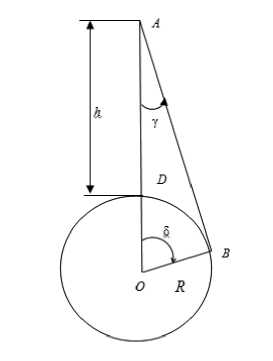
Рис. 5. Модель построения системы движения
Основные соотношения будут иметь следующий вид:
для угла γmax:
( R I
Y = arcsin ---3— max ( R3 + h J, ()
для угла δmax:
max
π
2 Y max ,
длина дуги DВ составит:
DB = R 3 × δ, (3) где угол δ – центральный угол, измеряется в радианах, R З – радиус Земли.
Учитывая влияние местных предметов (строений, возвышенностей местности, лесных массивов и т.д.), произведем вычисление угла γ и длины дуги DB в зависимости от высоты полета ИСЗ . Считаем, что сектор закрытия по углу γ составляет 5º, то есть при выполнении расчетов угол γ будет уменьшен на сектор закрытия (соответственно, укорачивается и дуга DB ).
Зависимости угла γ и дальности обнаружения АВ от высоты полета h представлены на рис. 6 и 7.
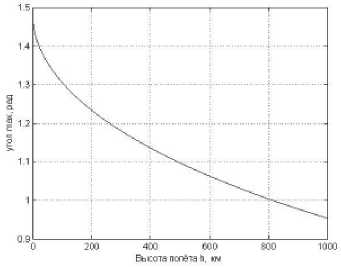
Рис. 6. Зависимость угла γ от высоты полета h летательного аппарата
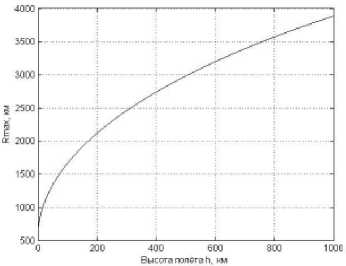
Рис. 7. Зависимость дальности обнаружения от высоты полета h
Схема обзора подстилающей земной поверхности в случае использования кругового метода сканирования представлена на рис. 8.
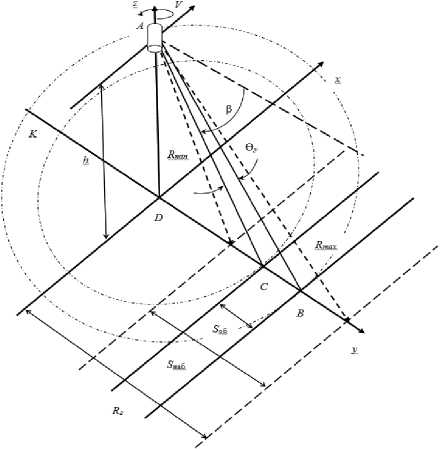
Рис. 8. Круговой метод обзора подстилающей поверхности
На рис. 8 приведены следующие обозначения: S об – полоса обзора, θ y – ширина диаграммы направленности антенны РЛС; S наб – полоса наблюдения, β – угол визирования, R max – максимальная дальность действия РЛС; R min – минимальная дальность действия РЛС, V – скорость движения ИСЗ, h – высота полета ИСЗ.
Произведем сравнительную оценку ширины полосы обзора для рассматриваемых методов. Для этого сравним величину проекции диаграм- мы направленности антенны на ось y – расстояние CB – с расстоянием между наиболее удаленными точками таких проекций, лежащих по разные стороны от начала координат – KB. Пусть k – отношение модулей данных величин:
CB = 2(ctge ctg0 y +1)
KB ~ ctg2 p+1
где β – угол визирования;
θ y – ширина диаграммы направленности антенны РЛС.
Приведенные на рис. 9 и рис. 10 графики иллюстрируют зависимость значений коэффициента k от значений угла визирования β при различных значениях ширины диаграммы направленности θ y .
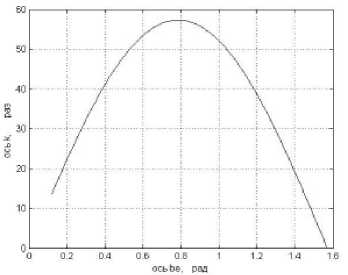
Рис. 9. Соотношения k для ширины θ y = 1 град
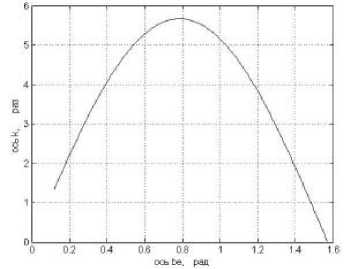
Рис. 10. Соотношения k для ширины θ y = 10 град
Анализ результатов расчетов выявляет ряд преимуществ кругового метода сканирования: при одинаковой ширине диаграмм направленности приемо-передающих антенн данный метод позволяет увеличить полосу обзора почти на порядок (до 57 раз) для ширины ДН θ y = 1º и до 5,5 раз – для ширины ДН θ y = 10º, при этом отсутствует такой, присущий методу бокового обзора, недостаток, как наличие непросматри-ваемой подспутниковой зоны.
Определим время нахождения цели в проекции ДН антенны для каждого из рассматриваемых методов.
Выражение для расчета времени нахождения цели в пределах проекции ДН при методе кругового сканирования [3] имеет вид
θ
T = y , (5)
ΩA где θy – ширина ДН в плоскости АКВ;
Ω A – угловая скорость вращения ДН.
Для метода бокового обзора время нахождения цели в проекции ДН антенны [2] составляет
T = θ x R ц V ,
где θ x – ширина ДН по оси X ;
R ( t ) – дальность до цели, изменяющаяся со временем;
V – скорость движения ИСЗ.
Сделаем допущение: θ y = θ x . Тогда для a – отношения T к T :
T θ y V V
a=ц= = ,
T Q a 6 x R ( t ) fi a R ( t ) получим следующие результаты (рис. 11):
ВЕСТНИК 2017
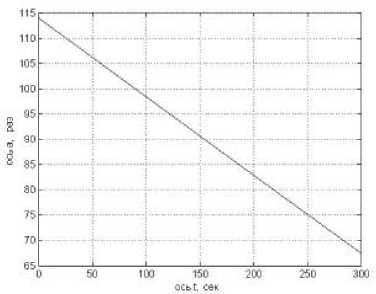
Рис. 11. Отношение времени наблюдения T ц / T
Время наблюдения цели при круговом методе обзора постоянно и составляет для данного случая 0,11 сек. В зависимости от дальности до цели при боковом обзоре время наблюдения лежит в интервале 12,8–7,8 с, что в 67–114 раз больше, чем при круговом обзоре.
Выбор модели, определение и расчёт доп леровского сдвига частоты, вызванного движением ИСЗ
Рассмотрим модель движения ИСЗ, которой соответствует схема, приведенная на рис. 12. Считаем, что источник излучения радиосигнала расположен в точке 2.
Выражения для расстояний r0 , r12 , r02 имеют вид:
H r = cosβ
где H – высота полета ИСЗ;
β – угол наклона между вертикалью к Земле и направлением на цель.
^ ( Vt + L cos Q t - r0 sin в cos a ) 2 + ( L sin Q t - r0 sin в sin a ) 2 + ( r 0cos в ) 2 , (8)
ВЕСТНИК 2017
где V – текущая скорость вдоль линии, параллельной оси X ;
Ω – угловая скорость вращения корпуса ИСЗ;
α – азимут относительно линии, параллельной оси X ;
L – диаметр круговой антенной решётки.

, (9)
( Vt ) 2 - 2 VtH • tg в • cos a +
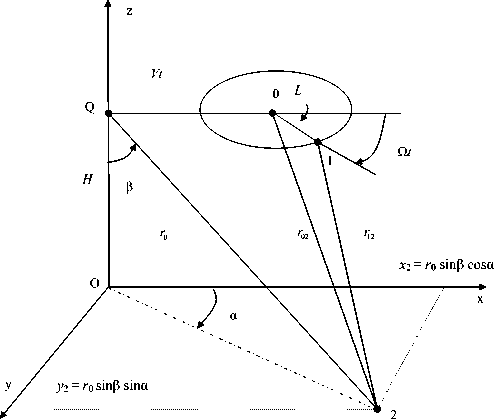
Рис. 12. Схема движения ИСЗ
ω – угловая частота излучаемого сигнала; c 0
k – волновое число;
r 02 – расстояние от точки 0 до точки 2;
r 12 – расстояние от точки 1 до точки 2;
r 0 – расстояние от точки Q до точки 2;
H – расстояние от точки O до точки Q
Вычислим радиальную скорость аппарата V r :
_ 2V 2 1 - 2VH tge cos a
V r I
2 ( Vt ) 2 - 2VtH tg в cos a +| -
2 . (10)
H cosα
Выражение для доплеровского смещения частоты сигнала, вызванного движением ИСЗ, бу- дет иметь вид:
F d =
V r λ
^^^^^^B
2V 2 1 - 2VHtgPcosa
. (11)
2X. ( Vt ) 2 - 2 VtH tg ^ cos a +1----- у ^ cosa
Исследуем движение ИСЗ, принимающего сигнал от источника радиоизлучения на поверхности Земли (беззапросный способ измерения частоты Доплера) при следующих значениях параметров модели: скорость V = 8 км/с, высота ИСЗ H = 200 км, угловая скорость вращения корпуса ИСЗ Ω = 5 об/c, угол α = 0 рад, угол β = π/9 – π/3 рад, радиус вращения антенны относительно оси L = 7,25 м, интервал наблюдения t = –1000 – 1000 c. Ширина диаграммы направленности антенны – π/180. Определим доплеровское смещение частоты сигнала, вызванное поступательно-вращательным движением ИСЗ в зависимости от угла β, и представим результаты вычислений в виде графиков на рис. 13–16.
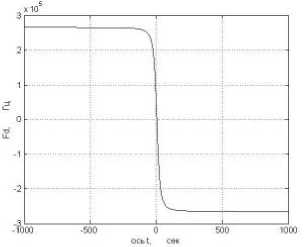
Рис. 13. Доплеровский сдвиг частоты, вызванный движением ИСЗ
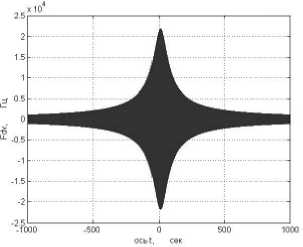
Рис. 14. Доплеровский сдвиг частоты, вызванный вращением корпуса (угол β = 20º)
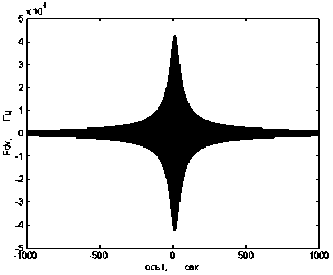
Рис. 15. Доплеровский сдвиг частоты, вызванный вращением корпуса ИСЗ (угол β = 40º)
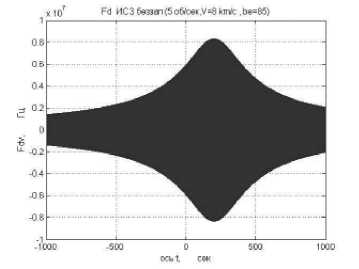
Рис. 16. Доплеровский сдвиг частоты, вызванный вращением корпуса ИСЗ (угол β = 85º)
Таким образом, диапазон изменения доплеровского сдвига частоты сигнала, вызываемого поступательным движением КА, составляет ±280 кГц. В момент прохождения траверза сдвиг частоты равен нулю. Диапазон изменения доплеровского сдвига частоты сигнала, возникающего за счет вращения антенны, меняется от нуля до ±82 кГц. В момент прохождения траверза частота Доплера равна нулю, то есть появляется ряд точек, где можно определять азимут направления на цель.
Заключение
Анализ полученных результатов моделирования позволяет сделать следующие выводы:
-
• время облучения цели не зависит от ее удаления до носителя РЛС ДЗЗ;
-
• метод кругового обзора позволяет многократно просматривать один и тот же участок земной поверхности, повышать надежность об-
- наружения целей и добиваться существенного увеличения (до 57 раз) просматриваемой площади подстилающей поверхности;
-
• если расстояние, которое проходит ИСЗ за один период вращения вокруг своего центра масс, будет меньше или равно проекции ширины ДН антенны на ось Х , то сканирование подстилающей поверхности осуществится без пропусков;
-
• увеличение числа циклов обзора повышает достоверность обнаружения целей из-за возможности их рассмотрения под различными ракурсами;
-
• метод кругового обзора позволяет выполнять сканирование земной поверхности без пропусков с использованием одной антенны. При этом наличие ряда положений КА, в которых доплеровский сдвиг частоты отсутствует, позволяет определять азимут направления на цель.
Полученные результаты могут быть использованы при разработке бортовых систем РЛС ДЗЗ на основе синтезированной кольцевой антенной решетки P-диапазона для изучения земной поверхности, а также в учебном процессе в рамках лабораторных работ по изучению теоретических основ радиолокации и антенно-фидерных устройств.
Список литературы Радиолокационные системы дистанционного зондирования Земли на базе спутников со стабилизацией вращением
- Титков Б.В., Алешкин А.П., Полончик О.Л. Космические аппараты дистанционного зондирования земли со стабилизацией вращением//Вопросы радиоэлектроники. -2017. -№ 1. -С. 75-80.
- Титков Б.В., Алешкин А.П., Полончик О.Л. Сравнительный анализ радиотехнических методов обзора земной поверхности с помощью средств, установленных на летательных аппаратах//Вопросы радиоэлектроники. -2017. -№ 1. -С. 21-27.
- Дулевич В.Е. Обоснование и расчёт тактико-технических характеристик радиолокационных станций обзора поверхности. -СПб.: ВИККИ им. А.Ф. Можайского, 1992. -84 с.
- Радиолокационные станции обзора Земли/Г.С. Кондратенков, В.А. Потехин и др.; под ред. Г.С. Кондратенкова. -М.: Радио и связь, 1983. -272 с.,
